OpenCV图像处理实战:BMP图像梯形变换与批量处理

简介:本文详解如何使用OpenCV对BMP图像进行梯形变换,重点介绍图像透视变换的基本原理及实现方法,并通过读取外部坐标文件实现批量处理。内容涵盖OpenCV图像读取、透视变换矩阵计算、图像变形操作及结果保存等关键步骤,并提供注意事项以提升图像处理的准确性和稳定性。 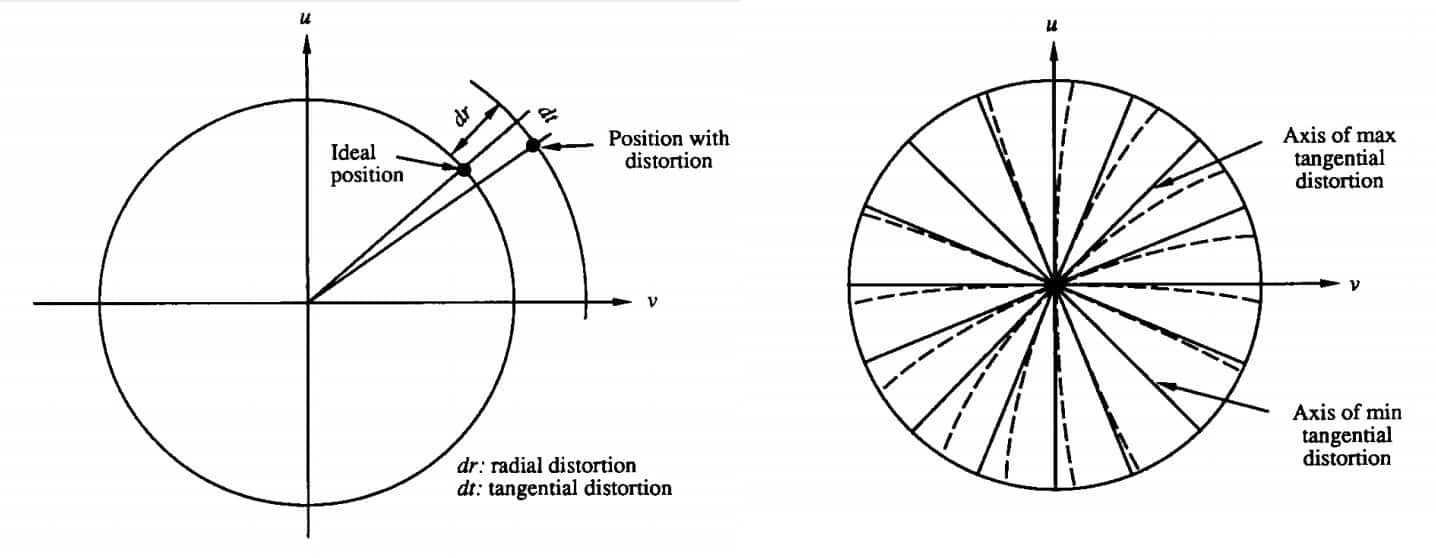
1. OpenCV图像处理基础
OpenCV(Open Source Computer Vision Library)是一个开源的计算机视觉与机器学习软件库,广泛应用于图像处理、视频分析、特征检测等领域。它以高效、跨平台、接口友好而著称,支持多种编程语言,如C++、Python和Java,尤其在Python生态中因其简洁易用的API受到开发者青睐。
图像数据的存储与格式支持
OpenCV中图像是以多维数组的形式进行存储的,通常使用NumPy数组表示。每个图像由像素点组成,每个像素点可能包含一个(灰度图)或多个通道(如RGB彩色图)。OpenCV支持多种图像格式,包括BMP、JPEG、PNG等,其中 BMP格式因其无压缩、结构清晰、读写速度快 等特点,在调试和教学中具有独特优势。
BMP格式在OpenCV中的处理优势
BMP(Bitmap)图像格式是一种未压缩的位图图像格式,文件结构简单,像素数据直接存储,没有复杂的压缩算法干扰,非常适合图像处理教学和底层调试。在OpenCV中,BMP图像的读取和写入效率较高,特别适用于需要频繁访问像素值的场景。
例如,使用OpenCV读取BMP图像的代码如下:
import cv2
# 读取BMP图像
image = cv2.imread('example.bmp')
# 显示图像尺寸和通道数
print(f"图像尺寸: {image.shape[:2]}, 通道数: {image.shape[2]}")
上述代码中:
- cv2.imread 用于读取图像,返回一个NumPy数组;
- image.shape 返回图像的维度信息,其中前两个值表示高度和宽度,第三个值为通道数(3表示BGR彩色图像);
通过本章的学习,我们掌握了OpenCV的基本图像结构、常见图像格式的支持情况,并理解了BMP图像在图像处理中的优势,为后续章节中进行图像读取、透视变换等操作打下了坚实的基础。
2. BMP图像读取与显示
在进行图像处理前,第一步通常是对图像进行读取和显示。BMP(Bitmap)图像格式因其无压缩、结构清晰、兼容性高,成为OpenCV图像处理中理想的入门格式。本章将从图像读取、显示、窗口控制,到图像属性的获取与像素访问等方面,逐步深入地讲解如何在OpenCV中操作BMP图像,为后续的透视变换等操作打下坚实基础。
2.1 图像读取的基本方法
图像读取是图像处理流程的第一步。OpenCV提供了简洁高效的接口函数用于读取图像文件。本节将重点介绍使用 cv2.imread 读取 BMP 图像的方法,并讨论图像路径和格式的兼容性处理。
2.1.1 使用 cv2.imread 读取 BMP 图像
OpenCV 使用 cv2.imread 函数来读取图像文件。其基本语法如下:
import cv2
image = cv2.imread('image_path', flags)
参数说明:
| 参数名 | 含义 |
|---|---|
image_path |
图像文件的路径,可以是相对路径或绝对路径 |
flags |
读取图像的方式标志,默认为 cv2.IMREAD_COLOR |
常用的 flags 参数如下:
| 标志常量 | 含义 |
|---|---|
cv2.IMREAD_COLOR |
默认值,读取为三通道彩色图像 |
cv2.IMREAD_GRAYSCALE |
读取为灰度图像(单通道) |
cv2.IMREAD_UNCHANGED |
读取图像,包括 alpha 通道(如 PNG) |
示例代码:
import cv2
# 读取彩色 BMP 图像
color_image = cv2.imread('sample.bmp', cv2.IMREAD_COLOR)
# 读取灰度 BMP 图像
gray_image = cv2.imread('sample.bmp', cv2.IMREAD_GRAYSCALE)
# 检查是否读取成功
if color_image is None:
print("图像读取失败,请检查路径或格式")
else:
print("彩色图像尺寸:", color_image.shape)
逐行分析:
- 第1行:导入 OpenCV 模块。
- 第4行:使用
cv2.imread以彩色模式读取 BMP 图像。 - 第7行:以灰度模式读取同一张图像。
- 第10行:判断图像是否读取成功,防止空指针异常。
- 第12行:打印图像的维度信息(高度、宽度、通道数)。
2.1.2 图像路径与格式的兼容性处理
在图像读取过程中,路径的设置和格式的兼容性是常见问题。OpenCV 对图像格式的支持较为广泛,但路径处理不当可能导致图像读取失败。
常见路径问题:
- 相对路径 vs 绝对路径 :相对路径适用于项目结构清晰的情况,绝对路径更稳定。
- 路径中包含中文或特殊字符 :OpenCV 在某些平台(如 Linux)下对非 ASCII 路径支持不佳,建议使用英文路径。
- Windows路径反斜杠问题 :Python 中字符串的反斜杠需转义或使用原始字符串。
# Windows路径示例(使用原始字符串)
image = cv2.imread(r'C:\images\sample.bmp')
# Linux/Mac路径示例
image = cv2.imread('/home/user/images/sample.bmp')
格式兼容性:
虽然 OpenCV 支持多种图像格式,但 BMP 由于其无压缩特性,在调试和教学中更具优势。以下是一个兼容性表格:
| 图像格式 | OpenCV 支持情况 | 是否推荐用于调试 |
|---|---|---|
| BMP | 完全支持,无需编解码器 | ✅ 推荐 |
| JPEG | 支持,需编解码器 | ✅ |
| PNG | 支持,含透明通道 | ✅ |
| WEBP | 支持,需额外编解码器 | ❌ |
| TIFF | 部分支持,需安装额外库 | ❌ |
2.2 图像的显示与窗口控制
读取图像后,下一步是将其显示出来。OpenCV 提供了 cv2.imshow 函数用于图像显示,同时可以控制窗口的命名和关闭方式。
2.2.1 使用 cv2.imshow 展示图像
cv2.imshow 函数用于在窗口中显示图像。其基本语法如下:
cv2.imshow(window_name, image)
参数说明:
| 参数名 | 含义 |
|---|---|
window_name |
窗口名称(字符串) |
image |
要显示的图像矩阵(NumPy 数组) |
示例代码:
import cv2
# 读取图像
image = cv2.imread('sample.bmp')
# 显示图像
cv2.imshow('BMP Image', image)
# 等待按键(0表示无限等待)
cv2.waitKey(0)
# 关闭所有窗口
cv2.destroyAllWindows()
逻辑分析:
cv2.imshow创建一个窗口并显示图像。cv2.waitKey(0)会暂停程序,直到用户按下任意键。cv2.destroyAllWindows()关闭所有由imshow创建的窗口。
2.2.2 窗口命名与关闭策略
在实际应用中,可能需要同时显示多张图像,因此窗口命名和关闭策略非常重要。
窗口命名规范:
- 窗口名应具有描述性,便于调试。
- 避免重复的窗口名,防止图像覆盖。
多窗口关闭策略:
| 函数 | 作用 |
|---|---|
cv2.destroyAllWindows() |
关闭所有窗口 |
cv2.destroyWindow(window_name) |
关闭指定名称的窗口 |
# 显示两张图像
cv2.imshow('Color Image', color_image)
cv2.imshow('Gray Image', gray_image)
# 等待按键
key = cv2.waitKey(0)
# 根据按键选择关闭方式
if key == ord('q'):
cv2.destroyAllWindows()
elif key == ord('c'):
cv2.destroyWindow('Color Image')
2.3 图像属性的获取与分析
图像处理过程中,了解图像的属性(如尺寸、通道数、数据类型)至关重要。OpenCV 提供了便捷的接口来获取这些信息,并允许访问图像的像素数据。
2.3.1 图像尺寸、通道数与数据类型的获取
可以通过图像对象的 .shape 和 .dtype 属性获取图像的基本信息。
import cv2
image = cv2.imread('sample.bmp')
# 获取图像维度
height, width, channels = image.shape
# 获取数据类型
data_type = image.dtype
print(f"图像尺寸:{width}x{height}")
print(f"通道数:{channels}")
print(f"数据类型:{data_type}")
输出示例:
图像尺寸:640x480
通道数:3
数据类型:uint8
| 属性 | 含义 |
|---|---|
shape |
返回一个三元组 (height, width, channels) |
dtype |
返回图像数据的类型(如 uint8 表示 0~255 的整数) |
2.3.2 图像像素数据的访问方式
图像本质上是一个三维 NumPy 数组,可以通过索引访问像素值。
单个像素访问:
# 访问第100行第200列的像素值(BGR格式)
pixel_value = image[100, 200]
print("像素值(BGR):", pixel_value)
遍历像素值:
for y in range(height):
for x in range(width):
pixel = image[y, x]
# 处理像素值
像素访问的注意事项:
- OpenCV 图像的通道顺序是 BGR(不是 RGB)。
- 直接遍历像素效率较低,建议使用向量化操作。
使用 NumPy 切片操作修改图像区域:
# 将图像左上角 100x100 区域设置为黑色
image[0:100, 0:100] = [0, 0, 0]
图像像素访问的 mermaid 流程图:
graph TD
A[读取图像] --> B[获取图像 shape]
B --> C{判断是否为三维数组}
C -->|是| D[获取 width, height, channels]
C -->|否| E[单通道图像]
D --> F[访问指定坐标像素]
E --> F
F --> G[输出像素值]
本章内容完整展示了如何使用 OpenCV 读取 BMP 图像、显示图像、控制窗口,以及获取图像属性和访问像素数据。下一章我们将深入讲解透视变换的数学基础,为图像变形和校正打下理论基础。
3. 梯形变换(透视变换)原理
3.1 透视变换的数学基础
3.1.1 齐次坐标与仿射变换的关系
在图像处理中,透视变换是仿射变换的扩展。仿射变换可以保持图像中的平行线不变,而透视变换则能够模拟三维空间中的投影效果,使图像产生更真实的变形。为了理解透视变换,首先需要引入 齐次坐标 (Homogeneous Coordinates)的概念。
齐次坐标通过增加一个维度来表示二维坐标点。例如,一个二维点 $(x, y)$ 在齐次坐标中表示为 $(x, y, 1)$。通过这种表示方式,我们可以将平移、旋转、缩放等操作统一为矩阵乘法的形式。
仿射变换 的一般形式如下:
\begin{bmatrix}
x’ \
y’ \
1
\end{bmatrix}
=
\begin{bmatrix}
a & b & t_x \
c & d & t_y \
0 & 0 & 1
\end{bmatrix}
\cdot
\begin{bmatrix}
x \
y \
1
\end{bmatrix}
其中 $ t_x $ 和 $ t_y $ 表示平移量,$ a, b, c, d $ 表示旋转和缩放参数。
与仿射变换不同, 透视变换 使用的是3x3的变换矩阵,形式如下:
\begin{bmatrix}
x’ \
y’ \
w
\end{bmatrix}
=
\begin{bmatrix}
h_{11} & h_{12} & h_{13} \
h_{21} & h_{22} & h_{23} \
h_{31} & h_{32} & h_{33}
\end{bmatrix}
\cdot
\begin{bmatrix}
x \
y \
1
\end{bmatrix}
最终的二维坐标通过归一化得到:
x’’ = \frac{x’}{w}, \quad y’’ = \frac{y’}{w}
这样,透视变换就可以处理非平行线之间的投影关系,适用于图像的透视校正、视角变换等场景。
3.1.2 透视变换矩阵的构造原理
透视变换矩阵的构造依赖于图像中对应点的映射关系。通常,我们需要 四个点对 (源图像上的四个点和目标图像上的四个点),这些点必须满足:
- 不共线
- 在源图像和目标图像中一一对应
构造变换矩阵的过程如下:
- 收集对应点对 :假设我们有源图像的四个点 $ (x_1, y_1), (x_2, y_2), (x_3, y_3), (x_4, y_4) $,以及目标图像的四个点 $ (u_1, v_1), (u_2, v_2), (u_3, v_3), (u_4, v_4) $。
- 建立线性方程组 :每个点对可以建立两个方程,总共可以建立8个方程,用于求解变换矩阵中的8个未知数(因为矩阵可以归一化为 $ h_{33} = 1 $)。
- 解方程组 :通过线性代数方法(如高斯消元或矩阵求逆)解出变换矩阵。
在OpenCV中,这个过程被封装在 cv2.getPerspectiveTransform 函数中,开发者只需提供源点和目标点即可自动计算变换矩阵。
3.2 变换前后坐标点的映射关系
3.2.1 四点对应法的几何意义
四点对应法(Four-point Correspondence Method)是透视变换的核心方法。其几何意义在于通过指定四个控制点,定义图像从一个视角到另一个视角的映射关系。
如下图所示,假设我们有一张倾斜拍摄的文档图像(左图),我们希望将其变换为正视图(右图)。此时,我们可以在原图中选取四个角点(如文档的四个顶点),然后在目标图像中指定它们的期望位置(如矩形的四个角)。
graph TD
A[源图像] --> B[选择4个关键点]
B --> C[建立坐标映射]
C --> D[应用透视变换]
D --> E[目标图像]
通过这种方式,我们可以实现图像的“透视校正”或“视角变换”,使得图像看起来像是从正前方拍摄的。
3.2.2 透视变换对图像失真的纠正能力
透视变换的一个重要应用是 图像失真校正 。例如,在扫描文档或拍摄证件时,由于相机角度的问题,图像可能会出现梯形失真(Trapezoidal Distortion)。
使用透视变换后,可以将这种失真图像“拉直”,使其恢复为矩形形状。这种能力广泛应用于OCR、文档扫描、AR增强现实等领域。
下面是一个使用OpenCV进行失真校正的代码示例:
import cv2
import numpy as np
# 读取图像
image = cv2.imread('distorted_document.bmp')
# 定义源点(图像中的四个顶点)
src_points = np.float32([[56, 65], [360, 52], [28, 387], [389, 390]])
# 定义目标点(希望变换后的图像位置)
dst_points = np.float32([[0, 0], [300, 0], [0, 400], [300, 400]])
# 计算透视变换矩阵
M = cv2.getPerspectiveTransform(src_points, dst_points)
# 应用透视变换
warped_image = cv2.warpPerspective(image, M, (300, 400))
# 显示结果
cv2.imshow('Warped Image', warped_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
代码分析:
-
cv2.imread:读取BMP图像文件。 -
src_points:定义图像中的四个角点,这些点应该是非共线的。 -
dst_points:定义变换后图像中这四个点的位置,通常是矩形结构。 -
cv2.getPerspectiveTransform:根据源点和目标点生成透视变换矩阵。 -
cv2.warpPerspective:将变换矩阵应用于图像,生成新的图像。 -
(300, 400):指定输出图像的大小。
此代码能够将一个梯形失真的文档图像转换为矩形,便于后续的文本识别或图像分析。
3.3 OpenCV中的透视变换函数
3.3.1 cv2.getPerspectiveTransform的作用与使用方法
OpenCV提供了 cv2.getPerspectiveTransform 函数来快速计算透视变换矩阵。该函数接受两个参数:
M = cv2.getPerspectiveTransform(src, dst)
src:源图像中的四个点,格式为np.float32的二维数组。dst:目标图像中的四个点,格式与src相同。
该函数返回一个 3x3 的变换矩阵 M ,用于后续的图像变形操作。
使用示例:
src = np.float32([[0, 0], [100, 0], [0, 100], [100, 100]])
dst = np.float32([[0, 0], [200, 0], [0, 200], [200, 200]])
M = cv2.getPerspectiveTransform(src, dst)
print(M)
输出结果是一个 3x3 的变换矩阵,可用于 cv2.warpPerspective 函数。
3.3.2 变换矩阵的可视化与验证
为了验证透视变换矩阵的正确性,我们可以将变换矩阵应用于图像并观察结果。此外,也可以手动绘制变换前后点的映射关系,进行可视化验证。
以下是一个变换矩阵的可视化示例:
import matplotlib.pyplot as plt
# 原始点
plt.scatter(src_points[:, 0], src_points[:, 1], c='r', label='Source Points')
# 变换后点
plt.scatter(dst_points[:, 0], dst_points[:, 1], c='b', label='Destination Points')
# 绘制连线
for i in range(4):
plt.plot([src_points[i][0], dst_points[i][0]],
[src_points[i][1], dst_points[i][1]], 'g--')
plt.legend()
plt.title("Perspective Transformation Mapping")
plt.xlabel("X")
plt.ylabel("Y")
plt.grid(True)
plt.show()
可视化说明:
- 红色点表示源图像中的点。
- 蓝色点表示目标图像中的点。
- 绿色虚线表示点之间的映射关系。
- 通过该图表可以直观地观察变换前后点的对应关系。
表格:变换矩阵元素说明
| 元素位置 | 含义说明 |
|---|---|
| M[0][0], M[0][1], M[0][2] | 控制x轴方向的缩放、旋转和平移 |
| M[1][0], M[1][1], M[1][2] | 控制y轴方向的缩放、旋转和平移 |
| M[2][0], M[2][1], M[2][2] | 控制透视投影,影响图像的“消失点” |
通过理解变换矩阵的结构和每个元素的作用,开发者可以更好地掌握图像变换的本质,并在实际项目中进行优化和调试。
本章从数学基础出发,详细解析了透视变换的原理及其在OpenCV中的实现方法。通过代码示例和图表可视化,帮助读者理解变换矩阵的构造方式与映射关系,为后续的图像变形和实际应用打下坚实基础。
4. 透视变换矩阵计算与图像变形
在图像处理中,透视变换是一种重要的几何变换技术,广泛应用于图像校正、视角变换、图像拼接等场景。本章将深入探讨如何根据用户提供的坐标点生成透视变换矩阵,并利用 OpenCV 提供的 warpPerspective 函数实现图像的变形操作。此外,我们还将分析顶点顺序对变换结果的影响以及异常坐标点的检测与处理方法,确保变换过程的稳定性和准确性。
4.1 坐标点的输入与变换矩阵生成
在进行透视变换之前,首先需要明确变换的源点(source points)和目标点(destination points)。这些点通常由用户手动指定或通过文件读取,用于构造变换矩阵。
4.1.1 手动指定四个源点与目标点
透视变换要求至少四个点进行映射,通常以四边形的形式进行。例如,在文档扫描校正中,用户可能会选择图像中的四个角点作为源点,并指定它们在目标图像中的位置。
import cv2
import numpy as np
# 读取图像
image = cv2.imread('document.bmp')
# 手动指定源点(原图中的四个角点)
src_points = np.float32([
[100, 100], # 左上角
[300, 100], # 右上角
[350, 400], # 右下角
[50, 400] # 左下角
])
# 指定目标点(希望变换后的位置)
dst_points = np.float32([
[0, 0], # 新图像左上角
[300, 0], # 新图像右上角
[300, 400], # 新图像右下角
[0, 400] # 新图像左下角
])
# 计算透视变换矩阵
M = cv2.getPerspectiveTransform(src_points, dst_points)
# 输出变换矩阵
print("透视变换矩阵 M:\n", M)
代码分析:
src_points是原始图像中四个点的坐标,dst_points是目标图像中对应的四个点。cv2.getPerspectiveTransform()接收两组点,计算出透视变换矩阵 M。- 返回的矩阵 M 是一个 3x3 的矩阵,用于后续的图像变换。
4.1.2 利用 txt 文件读取坐标信息
在批量处理图像时,手动输入坐标显然不现实。我们可以将坐标信息保存在 .txt 文件中,并通过程序读取。
# 读取坐标点文件
def read_points_from_file(filename):
points = []
with open(filename, 'r') as f:
for line in f:
x, y = map(float, line.strip().split(','))
points.append([x, y])
return np.float32(points)
# 示例文件内容:
# 100,100
# 300,100
# 350,400
# 50,400
src_points = read_points_from_file('src_points.txt')
dst_points = read_points_from_file('dst_points.txt')
M = cv2.getPerspectiveTransform(src_points, dst_points)
print("从文件加载的变换矩阵 M:\n", M)
代码分析:
read_points_from_file()函数读取 txt 文件,将每行的坐标转换为浮点数列表。- 每个 txt 文件应包含四个点,每行一个点,坐标用逗号分隔。
- 通过文件读取方式可提高程序灵活性,适合自动化流程。
4.2 图像变形函数 warpPerspective 详解
OpenCV 提供了 cv2.warpPerspective() 函数,用于根据变换矩阵对图像进行透视变换。理解其参数设置对图像变形效果至关重要。
4.2.1 函数参数的意义与设置技巧
# 执行透视变换
warped_image = cv2.warpPerspective(image, M, (300, 400))
函数原型:
cv2.warpPerspective(src, M, dsize[, dst[, flags[, borderMode[, borderValue]]]])
| 参数名 | 说明 |
|---|---|
src |
输入图像(numpy array) |
M |
3x3 的透视变换矩阵 |
dsize |
输出图像的尺寸(width, height) |
flags |
插值方法(如 cv2.INTER_LINEAR ) |
borderMode |
边界填充方式(如 cv2.BORDER_CONSTANT ) |
borderValue |
边界填充颜色,默认为黑色(0, 0, 0) |
插值方法选择:
cv2.INTER_NEAREST:最近邻插值,速度快但质量差。cv2.INTER_LINEAR:双线性插值(默认),平衡速度与质量。cv2.INTER_CUBIC:三次样条插值,质量高但计算慢。cv2.INTER_AREA:区域插值,适合缩小图像。
示例代码:
# 使用双线性插值并设置边界填充为白色
warped_image = cv2.warpPerspective(image, M, (300, 400),
flags=cv2.INTER_LINEAR,
borderMode=cv2.BORDER_CONSTANT,
borderValue=(255, 255, 255))
逻辑分析:
- 选择合适的插值方法可以避免图像变形后出现锯齿或模糊。
- 使用
borderValue可以避免图像变形时出现黑色边缘,提升视觉效果。
4.2.2 输出图像尺寸控制与插值方法选择
图像尺寸直接影响变换后图像的显示效果。选择不当可能导致图像被裁剪或拉伸。
# 计算输出图像的宽高
output_width = int(np.linalg.norm(dst_points[1] - dst_points[0]))
output_height = int(np.linalg.norm(dst_points[2] - dst_points[1]))
# 动态调整输出图像大小
warped_image = cv2.warpPerspective(image, M, (output_width, output_height))
图表分析:
下表展示了不同输出尺寸对图像的影响:
| 输出尺寸 (width, height) | 效果描述 |
|---|---|
| (300, 400) | 与目标点匹配,图像完整显示 |
| (200, 200) | 图像被裁剪,部分信息丢失 |
| (500, 600) | 图像被拉伸,比例失真 |
结论:
- 输出图像尺寸应尽量与目标点构成的区域匹配。
- 可以通过计算目标点之间的距离动态设定输出尺寸,提高通用性。
4.3 图像顶点顺序规范与坐标一致性处理
在使用透视变换时,源点和目标点的排列顺序必须一致,否则会导致变换结果错误。此外,异常坐标点(如超出图像范围的点)也可能影响变换质量。
4.3.1 顶点排列顺序对变换结果的影响
# 错误的点顺序导致图像变形错误
src_points_wrong = np.float32([
[100, 100], # 左上
[300, 100], # 右上
[50, 400], # 左下
[350, 400] # 右下
])
# 正确顺序:左上、右上、右下、左下
src_points_correct = np.float32([
[100, 100],
[300, 100],
[350, 400],
[50, 400]
])
# 生成两个变换矩阵
M_wrong = cv2.getPerspectiveTransform(src_points_wrong, dst_points)
M_correct = cv2.getPerspectiveTransform(src_points_correct, dst_points)
# 变换图像
warped_wrong = cv2.warpPerspective(image, M_wrong, (300, 400))
warped_correct = cv2.warpPerspective(image, M_correct, (300, 400))
分析:
- 顶点顺序错误会导致变换后的图像出现扭曲、错位。
- 建议统一使用“左上 → 右上 → 右下 → 左下”的顺序排列顶点。
4.3.2 异常坐标点的检测与处理机制
在自动获取坐标点时,可能出现超出图像范围或格式错误的点。应增加异常检测机制。
def validate_points(points, image_shape):
height, width = image_shape[:2]
for pt in points:
x, y = pt
if not (0 <= x < width and 0 <= y < height):
raise ValueError(f"坐标点 {pt} 超出图像范围 ({width}, {height})")
# 使用前验证
try:
validate_points(src_points, image.shape)
except ValueError as e:
print("坐标验证失败:", e)
异常处理流程图:
graph TD
A[读取坐标点] --> B{是否在图像范围内?}
B -- 是 --> C[继续处理]
B -- 否 --> D[抛出异常并提示]
逻辑分析:
validate_points()函数检查每个坐标是否在图像范围内。- 若发现异常坐标,程序抛出异常并终止处理,防止后续操作出错。
- 增加容错机制可提升程序稳定性,避免因输入错误导致程序崩溃。
5. 图像保存与参数设置优化
在进行图像透视变换之后,保存变换后的图像是一项关键任务。OpenCV 提供了多种图像保存接口,并支持多种图像格式与压缩参数的设置。为了确保图像质量、减少像素丢失,并提高处理效率,本章将深入探讨图像保存的操作方法、参数优化策略以及图像边缘填充与插值算法的影响机制。
5.1 变换后图像的保存操作
将经过透视变换处理后的图像保存到磁盘是图像处理流程中的最后一步,也是数据持久化的重要环节。OpenCV 提供了 cv2.imwrite() 函数用于图像保存。
5.1.1 使用cv2.imwrite保存图像文件
cv2.imwrite() 是 OpenCV 中最常用的图像保存函数,其基本用法如下:
import cv2
# 读取图像
img = cv2.imread("input.bmp")
# 定义源点与目标点(此处为简单示例)
src_points = np.float32([[0, 0], [img.shape[1], 0], [0, img.shape[0]], [img.shape[1], img.shape[0]]])
dst_points = np.float32([[0, 0], [img.shape[1], 0], [img.shape[1]//4, img.shape[0]], [img.shape[1] - img.shape[1]//4, img.shape[0]]])
# 计算变换矩阵
M = cv2.getPerspectiveTransform(src_points, dst_points)
# 应用透视变换
warped_img = cv2.warpPerspective(img, M, (img.shape[1], img.shape[0]))
# 保存图像
cv2.imwrite("output_warped.jpg", warped_img)
代码逻辑分析:
- 第1行 :导入 OpenCV 模块。
- 第4行 :读取原始 BMP 图像。
- 第7-8行 :定义源点和目标点,为透视变换做准备。
- 第11行 :调用
getPerspectiveTransform()函数生成变换矩阵。 - 第14行 :使用
warpPerspective()对图像进行透视变换。 - 第17行 :调用
imwrite()将变换后的图像保存为output_warped.jpg。
5.1.2 文件格式、路径与压缩参数设置
OpenCV 支持多种图像格式的保存,如 .png 、 .jpg 、 .bmp 、 .tiff 等。不同格式的保存方式略有不同,尤其在压缩参数设置方面。
# 保存为 PNG 格式(无损压缩)
cv2.imwrite("output.png", warped_img, [cv2.IMWRITE_PNG_COMPRESSION, 9])
# 保存为 JPG 格式(有损压缩)
cv2.imwrite("output.jpg", warped_img, [cv2.IMWRITE_JPEG_QUALITY, 95])
参数说明:
| 参数名称 | 说明 | 可选值范围 |
|---|---|---|
cv2.IMWRITE_PNG_COMPRESSION |
PNG 压缩等级(0-9) | 0(无压缩)~9(最大压缩) |
cv2.IMWRITE_JPEG_QUALITY |
JPG 质量参数(0-100) | 0(最低质量)~100(最高质量) |
提示 :PNG 是无损格式,适合需要保留所有细节的图像;JPG 是有损压缩格式,适合节省存储空间但允许轻微质量损失的场景。
5.2 图像尺寸与变换参数的灵活控制
在图像处理中,输出图像的尺寸、变换中心和填充方式是影响最终图像质量的重要因素。通过合理设置这些参数,可以有效控制图像变形的视觉效果。
5.2.1 输出图像大小的动态调整
使用 cv2.warpPerspective() 时,第三个参数 (width, height) 用于指定输出图像的尺寸。可以通过动态计算变换后的图像边界来设置合适的输出尺寸。
# 获取变换后图像的四个顶点坐标
h, w = img.shape[:2]
corners = np.float32([[0, 0], [w, 0], [w, h], [0, h]])
corners = np.expand_dims(corners, axis=0)
transformed_corners = cv2.perspectiveTransform(corners, M)
# 计算最小外接矩形
x, y, w_new, h_new = cv2.boundingRect(transformed_corners)
# 创建新的变换矩阵以适应新尺寸
M_new = np.array([[1, 0, -x], [0, 1, -y], [0, 0, 1]]) @ M
# 应用新的变换矩阵并指定输出尺寸
warped_img = cv2.warpPerspective(img, M_new, (w_new, h_new))
逻辑分析:
- 第4-7行 :获取变换后的四个顶点,并计算最小外接矩形,以确定输出图像的大小。
- 第10行 :构造新的变换矩阵,将图像平移到左上角。
- 第13行 :应用新矩阵进行图像变换,确保图像完整显示。
5.2.2 变换中心与填充方式的设定
变换中心的选择会影响图像的透视效果。OpenCV 允许设置变换矩阵的中心点,并结合边缘填充方式来优化图像变形。
# 设置变换中心为图像中心
center = (img.shape[1] // 2, img.shape[0] // 2)
# 构造平移变换矩阵
M_translate = np.float32([[1, 0, center[0]], [0, 1, center[1]], [0, 0, 1]])
# 构造综合变换矩阵
M_combined = M_translate @ M
# 应用变换并指定填充方式
warped_img = cv2.warpPerspective(img, M_combined, (img.shape[1], img.shape[0]), borderMode=cv2.BORDER_REPLICATE)
参数说明:
| 参数名 | 说明 | 可选值 |
|---|---|---|
borderMode |
边缘填充方式 | cv2.BORDER_CONSTANT 、 cv2.BORDER_REPLICATE 、 cv2.BORDER_WRAP |
建议 :
BORDER_REPLICATE可以复制边缘像素,适合自然图像;BORDER_CONSTANT可以设置固定颜色填充,适合需要统一背景的场景。
5.3 图像边缘填充与像素丢失问题
在图像透视变换过程中,边缘像素可能因变换而丢失或被截断。如何有效防止像素丢失,同时保持图像完整性,是图像处理中的重要课题。
5.3.1 边缘拉伸与镜像填充策略
OpenCV 提供了多种边缘填充模式,以应对图像变换中的边缘问题。
graph TD
A[边缘填充模式] --> B(cv2.BORDER_CONSTANT)
A --> C(cv2.BORDER_REPLICATE)
A --> D(cv2.BORDER_REFLECT)
A --> E(cv2.BORDER_WRAP)
A --> F(cv2.BORDER_REFLECT_101)
比较分析:
| 填充模式 | 效果描述 | 适用场景 |
|---|---|---|
cv2.BORDER_CONSTANT |
用指定颜色填充边缘 | 需要统一背景时使用 |
cv2.BORDER_REPLICATE |
复制边缘像素向外扩展 | 自然图像,保持内容连续 |
cv2.BORDER_REFLECT |
镜像反射填充 | 美观图像边缘 |
cv2.BORDER_WRAP |
图像边缘环绕填充 | 特殊艺术效果 |
cv2.BORDER_REFLECT_101 |
边缘像素镜像反射,不包含边缘本身 | 高质量图像处理 |
5.3.2 插值算法对图像质量的影响
在图像变换过程中,像素位置可能不是整数坐标,因此需要插值算法来计算像素值。OpenCV 提供了多种插值方式:
# 使用不同插值方法进行透视变换
interpolation_methods = {
"Nearest": cv2.INTER_NEAREST,
"Linear": cv2.INTER_LINEAR,
"Cubic": cv2.INTER_CUBIC,
"Lanczos4": cv2.INTER_LANCZOS4
}
for name, method in interpolation_methods.items():
warped_img = cv2.warpPerspective(img, M, (img.shape[1], img.shape[0]), flags=method)
cv2.imwrite(f"output_{name}.jpg", warped_img)
插值算法对比表:
| 插值方法 | 特点 | 速度 | 质量 | 适用场景 |
|---|---|---|---|---|
INTER_NEAREST |
最邻近插值,速度快 | ✅ | ❌ | 实时处理,低精度需求 |
INTER_LINEAR |
双线性插值,平衡速度与质量 | ✅✅ | ✅✅ | 通用图像变换 |
INTER_CUBIC |
双三次插值,高质量但较慢 | ❌ | ✅✅✅ | 图像缩放、高质量需求 |
INTER_LANCZOS4 |
Lanczos 插值,超高质量 | ❌❌ | ✅✅✅✅ | 专业图像编辑 |
优化建议 :在需要保持图像清晰度的场景中,优先使用
INTER_CUBIC或INTER_LANCZOS4;在速度优先的场景中,使用INTER_LINEAR即可。
总结
本章系统讲解了图像保存的基本方法、参数优化策略以及边缘填充与插值算法的设置技巧。通过合理设置图像保存格式与压缩参数,可以有效控制图像质量与文件体积。同时,灵活调整输出图像尺寸、变换中心和填充方式,可以提升图像变形的视觉效果。此外,插值算法的选择直接影响图像的清晰度和处理效率,是图像处理流程中不可忽视的重要环节。
在实际项目中,应根据图像类型、用途和性能要求,选择合适的保存方式与参数配置,从而实现高质量的图像处理结果。
6. 批量图像处理流程设计
在实际应用中,图像处理往往不是单张图片的孤立操作,而是涉及大量图像的批量处理。尤其是在文档扫描、图像校正、自动化视觉检测等场景下,如何高效、稳定地对多张图像进行统一处理成为关键。本章将围绕批量图像处理的需求,探讨如何设计一个稳定、可扩展的处理流程,涵盖图像遍历、坐标自动加载、错误处理等多个核心环节。
6.1 批量处理的需求与流程规划
批量图像处理的核心在于自动化和一致性。相比单张图像的手动处理,批量操作要求程序能够高效地遍历文件、读取配置,并在统一的处理逻辑下完成变换操作。这不仅提高了处理效率,也减少了人为干预带来的误差。
6.1.1 多图像文件的遍历与处理逻辑
在OpenCV中,结合Python标准库如 os 和 glob ,可以高效地实现图像文件的遍历。以下是一个典型的批量图像处理代码框架:
import cv2
import os
input_folder = "images/input"
output_folder = "images/output"
os.makedirs(output_folder, exist_ok=True)
for img_file in os.listdir(input_folder):
if img_file.lower().endswith(('.bmp', '.png', '.jpg')):
img_path = os.path.join(input_folder, img_file)
image = cv2.imread(img_path)
# 图像处理逻辑,例如透视变换
# processed_image = perspective_transform(image, ...)
output_path = os.path.join(output_folder, img_file)
cv2.imwrite(output_path, processed_image)
代码逻辑分析:
-
os.listdir(input_folder):遍历输入文件夹中的所有文件。 -
endswith:判断文件扩展名,仅处理图像格式。 -
cv2.imread:读取图像。 -
cv2.imwrite:将处理后的图像保存到输出目录。
参数说明:
input_folder:图像输入目录。output_folder:输出图像保存路径。img_file:当前处理的图像文件名。
优化建议:
- 可使用
cv2.IMREAD_UNCHANGED参数保持图像的原始通道信息。 - 可以使用
cv2.imwrite(output_path, processed_image, [cv2.IMWRITE_PNG_COMPRESSION, 9])控制输出质量。
6.1.2 自动化坐标配置与参数传递
在批量处理中,透视变换所需的源点与目标点通常不会手动输入,而是从配置文件(如 .txt 或 .csv )中读取。这样可以实现参数与代码的分离,提高可维护性。
以下是一个自动化读取坐标点的示例:
def load_points(file_path):
with open(file_path, 'r') as f:
lines = f.readlines()
src_points = [tuple(map(int, line.strip().split(','))) for line in lines[:4]]
dst_points = [tuple(map(int, line.strip().split(','))) for line in lines[4:8]]
return src_points, dst_points
src_pts, dst_pts = load_points("config/points.txt")
流程图(mermaid):
graph TD
A[开始] --> B[读取配置文件]
B --> C{配置文件是否存在?}
C -->|是| D[解析坐标点]
C -->|否| E[抛出异常或使用默认值]
D --> F[返回坐标点]
参数说明:
file_path:坐标配置文件路径。lines:每行读取的字符串数据。src_points:源图像上的四个坐标点。dst_points:目标图像上的四个坐标点。
注意事项:
- 文件格式应统一,每行一个坐标点,格式为
x,y。 - 需处理文件缺失、格式错误等异常情况。
6.2 坐标点格式解析与数据转换
在实际应用中,坐标数据可能来自不同渠道,如手动输入、图像标注工具、机器学习模型预测等。这些数据通常以字符串形式存储在文本文件中,需要进行解析和转换。
6.2.1 txt文件的读取与解析方法
以下是一个解析txt文件的完整函数示例:
def parse_coords(file_path):
try:
with open(file_path, 'r') as f:
coords = [tuple(map(int, line.strip().split(','))) for line in f if line.strip()]
if len(coords) != 8:
raise ValueError("坐标点数量应为8个")
return coords[:4], coords[4:]
except FileNotFoundError:
print(f"错误:文件 {file_path} 不存在")
return None, None
except ValueError as ve:
print(f"格式错误:{ve}")
return None, None
代码逻辑分析:
- 使用
with open安全地读取文件。 - 利用列表推导式和
map将字符串转换为整型坐标。 - 校验坐标数量是否为8个(源点4个,目标点4个)。
- 异常处理:文件不存在、格式错误。
示例txt文件内容:
100,100
300,100
300,300
100,300
50,50
250,50
250,250
50,250
6.2.2 字符串到数值的转换与异常处理
在解析过程中,字符串到数值的转换可能会失败,比如文件中包含非法字符或格式错误。此时应使用异常处理机制进行容错。
try:
x, y = map(int, line.strip().split(','))
except ValueError:
print(f"无效坐标格式:{line}")
continue
表格:常见字符串解析错误类型及处理方式
| 错误类型 | 原因 | 处理方式 |
|---|---|---|
| 非数字字符 | 包含字母或特殊符号 | 使用try-except捕获异常 |
| 分隔符错误 | 没有使用逗号分隔 | 提前验证格式或替换空格 |
| 缺少坐标点 | 总数不足8个点 | 抛出异常并提示 |
| 超出范围的坐标值 | 数值超出图像边界 | 添加范围判断 |
| 文件编码问题 | 使用了非UTF-8编码 | 指定编码方式打开文件,如 encoding='utf-8' |
优化建议:
- 使用正则表达式(
re模块)进行更严格的格式匹配。 - 对于GUI工具生成的坐标文件,建议统一使用JSON或YAML格式增强可读性。
6.3 提高程序健壮性的策略
在自动化批量处理过程中,程序需要面对各种异常情况,如文件缺失、路径错误、坐标无效等。因此,构建一个具备容错能力的程序是提高系统稳定性的关键。
6.3.1 错误坐标的容错机制
在处理坐标点时,必须确保其在图像范围内。否则可能导致透视变换失败或结果异常。
def validate_coords(src_points, image_shape):
height, width = image_shape[:2]
for x, y in src_points:
if not (0 <= x < width and 0 <= y < height):
raise ValueError(f"坐标 ({x}, {y}) 超出图像范围")
参数说明:
src_points:源图像上的坐标点列表。image_shape:图像尺寸,如(height, width, channels)。
优化建议:
- 可以添加边界缓冲区,例如
x in range(10, width - 10)。 - 对于坐标点可以进行排序,确保其为顺时针或逆时针顺序。
6.3.2 文件缺失与路径错误的提示机制
在图像读取与写入过程中,路径错误是常见问题。可以通过封装函数来统一处理:
def safe_read_image(path):
if not os.path.exists(path):
print(f"文件不存在:{path}")
return None
try:
return cv2.imread(path)
except Exception as e:
print(f"读取图像失败:{e}")
return None
流程图(mermaid):
graph TD
A[开始读取图像] --> B{路径是否存在?}
B -->|否| C[输出错误信息]
B -->|是| D[尝试读取]
D --> E{读取是否成功?}
E -->|否| F[捕获异常并输出]
E -->|是| G[返回图像数据]
参数说明:
path:图像文件路径。cv2.imread:尝试读取图像。Exception:捕获所有图像读取异常。
优化建议:
- 在批量处理前,可先进行路径检查。
- 使用日志模块记录错误信息,便于后续分析。
本章围绕批量图像处理流程设计展开,从图像遍历、坐标配置、数据解析到异常处理,构建了一个完整的自动化图像处理框架。通过合理的结构设计与异常处理机制,可以显著提升程序的健壮性与可维护性,适用于大规模图像处理任务。
7. 梯形变换的应用场景与完整实战
7.1 图像校正中的梯形变换应用
梯形变换(透视变换)在图像校正中有着广泛的应用,尤其是在扫描文档处理和相机倾斜造成的图像失真问题上,具有显著的修正效果。
7.1.1 扫描文档的透视校正
当使用手机或扫描仪拍摄文档时,由于拍摄角度不正,往往会导致文档图像出现梯形失真。例如,文档的矩形边界在图像中呈现为梯形。通过透视变换,可以将这种梯形校正为标准的矩形。
操作步骤:
- 识别文档边界点 :手动或自动检测文档的四个顶点。
- 定义目标矩形 :设定四个顶点映射到的目标坐标,通常为等比例的矩形。
- 计算变换矩阵 :使用
cv2.getPerspectiveTransform()。 - 执行透视变换 :使用
cv2.warpPerspective()。
import cv2
import numpy as np
# 假设四个原始点(按顺序:左上、右上、右下、左下)
src_points = np.array([[100, 100], [300, 120], [320, 300], [80, 280]], dtype=np.float32)
# 目标点(标准矩形)
dst_points = np.array([[0, 0], [200, 0], [200, 200], [0, 200]], dtype=np.float32)
# 计算透视变换矩阵
M = cv2.getPerspectiveTransform(src_points, dst_points)
# 读取图像并执行变换
img = cv2.imread('document_skew.bmp')
warped_img = cv2.warpPerspective(img, M, (200, 200))
# 显示结果
cv2.imshow('Corrected Document', warped_img)
cv2.waitKey(0)
cv2.destroyAllWindows()
- 参数说明 :
src_points:原始图像中四个点的坐标。dst_points:目标图像中四个点的坐标。M:由getPerspectiveTransform生成的变换矩阵。warpPerspective第三个参数为输出图像的尺寸。
7.1.2 相机倾斜导致的图像畸变纠正
在监控或无人机航拍中,由于相机倾斜角度不同,图像会产生畸变。通过透视变换可将图像校正为“俯视图”,便于后续分析。
应用场景举例 :
- 无人机航拍图像用于地图拼接。
- 交通监控中车牌识别前的图像矫正。
实现思路 :
- 利用已知的地面参考点进行透视变换。
- 或者通过特征匹配自动识别对应点。
7.2 图像拼接与视角变换
7.2.1 多视角图像的对齐与融合
图像拼接技术常用于生成全景图。在拼接过程中,不同视角的图像存在透视差异,必须通过透视变换进行对齐。
流程步骤 :
- 特征提取与匹配 :使用SIFT、SURF等算法提取特征点并进行匹配。
- 计算单应性矩阵(Homography Matrix) :基于匹配点对计算透视变换矩阵。
- 图像变换与融合 :将图像变换后拼接,并进行融合处理。
# 示例:使用SIFT特征匹配 + 透视变换拼接图像
import cv2
import numpy as np
img1 = cv2.imread('view1.jpg')
img2 = cv2.imread('view2.jpg')
sift = cv2.SIFT_create()
# 提取特征点和描述子
kp1, des1 = sift.detectAndCompute(img1, None)
kp2, des2 = sift.detectAndCompute(img2, None)
# BFMatcher匹配
bf = cv2.BFMatcher()
matches = bf.knnMatch(des1, des2, k=2)
# 筛选匹配点
good_matches = []
for m, n in matches:
if m.distance < 0.75 * n.distance:
good_matches.append(m)
# 获取匹配点坐标
src_pts = np.float32([kp1[m.queryIdx].pt for m in good_matches]).reshape(-1, 1, 2)
dst_pts = np.float32([kp2[m.trainIdx].pt for m in good_matches]).reshape(-1, 1, 2)
# 计算单应性矩阵
H, mask = cv2.findHomography(src_pts, dst_pts, cv2.RANSAC, 5.0)
# 透视变换
height, width, channels = img2.shape
result = cv2.warpPerspective(img1, H, (width + img1.shape[1], height))
result[0:img2.shape[0], 0:img2.shape[1]] = img2
# 显示拼接结果
cv2.imshow('Stitched Image', result)
cv2.waitKey(0)
cv2.destroyAllWindows()
7.2.2 透视变换在全景图拼接中的作用
透视变换在全景图拼接中不仅用于图像的对齐,还用于消除重影、调整图像边缘、融合图像亮度等。它是实现无缝拼接的核心技术之一。
7.3 OpenCV图像处理完整实战流程
7.3.1 从图像读取到最终保存的全流程封装
为了便于复用和模块化开发,我们可以将整个透视变换流程封装成一个函数,输入图像路径和坐标文件,输出校正后的图像。
def correct_perspective(image_path, coord_file, output_path):
# 读取图像
img = cv2.imread(image_path)
# 读取坐标文件(格式:x1,y1;x2,y2;x3,y3;x4,y4)
with open(coord_file, 'r') as f:
coords = f.read().strip().split(';')
src_points = np.array([list(map(int, c.split(','))) for c in coords], dtype=np.float32)
# 定义目标矩形
width, height = 300, 400
dst_points = np.array([[0, 0], [width, 0], [width, height], [0, height]], dtype=np.float32)
# 计算变换矩阵并执行透视变换
M = cv2.getPerspectiveTransform(src_points, dst_points)
warped_img = cv2.warpPerspective(img, M, (width, height))
# 保存结果
cv2.imwrite(output_path, warped_img)
print(f"Image saved to {output_path}")
7.3.2 模块化代码设计与可扩展性优化
为了提高代码的可维护性和扩展性,可以采用以下策略:
- 参数化配置 :将图像尺寸、插值方式等参数作为函数参数传入。
- 异常处理 :增加文件路径检查、坐标格式验证等逻辑。
- 日志记录 :添加日志信息,便于调试和追踪。
- 图形界面封装 :使用
tkinter或PyQt提供图形化操作界面。
# 示例:增加参数和异常处理
def correct_perspective(image_path, coord_file, output_path, target_size=(300, 400), interpolation=cv2.INTER_LINEAR):
if not os.path.exists(image_path):
raise FileNotFoundError(f"Image file {image_path} not found.")
if not os.path.exists(coord_file):
raise FileNotFoundError(f"Coordinate file {coord_file} not found.")
# 后续处理逻辑...
代码扩展建议 :
- 支持多种图像格式(JPG、PNG等)。
- 支持多图像批量处理。
- 集成OpenCV的绘图功能,自动标注变换点。
下一章节将深入探讨图像增强与滤波技术,进一步提升图像质量。
简介:本文详解如何使用OpenCV对BMP图像进行梯形变换,重点介绍图像透视变换的基本原理及实现方法,并通过读取外部坐标文件实现批量处理。内容涵盖OpenCV图像读取、透视变换矩阵计算、图像变形操作及结果保存等关键步骤,并提供注意事项以提升图像处理的准确性和稳定性。

中国智能体开发者社区,聚焦智能体与大模型开发,提供前沿资讯、实用工具链、开源项目及行业案例。通过技术沙龙、开发者大赛等活动,促进经验交流与协作,助力开发者快速构建创新智能应用。
更多推荐


 15
15 0
0- 0



 已为社区贡献35条内容
已为社区贡献35条内容

所有评论(0)