硬件开发_基于STM32单片机的智能垃圾桶系统
本文介绍了一款基于STM32的智能垃圾分类系统,具备人体感应、语音提示、自动关门、夜灯和语音识别等功能。系统采用STM32F103C8T6作为主控,通过超声波传感器检测人体接近,触发语音提示和垃圾箱开关控制;集成了光敏传感器实现夜间照明,并通过语音识别模块支持语音指令开箱。电路设计包括超声波测距、红外路径识别、光强检测等模块,程序设计采用模块化架构实现各功能协调运行。该系统实现了垃圾分类的智能化管
一.系统概述
-
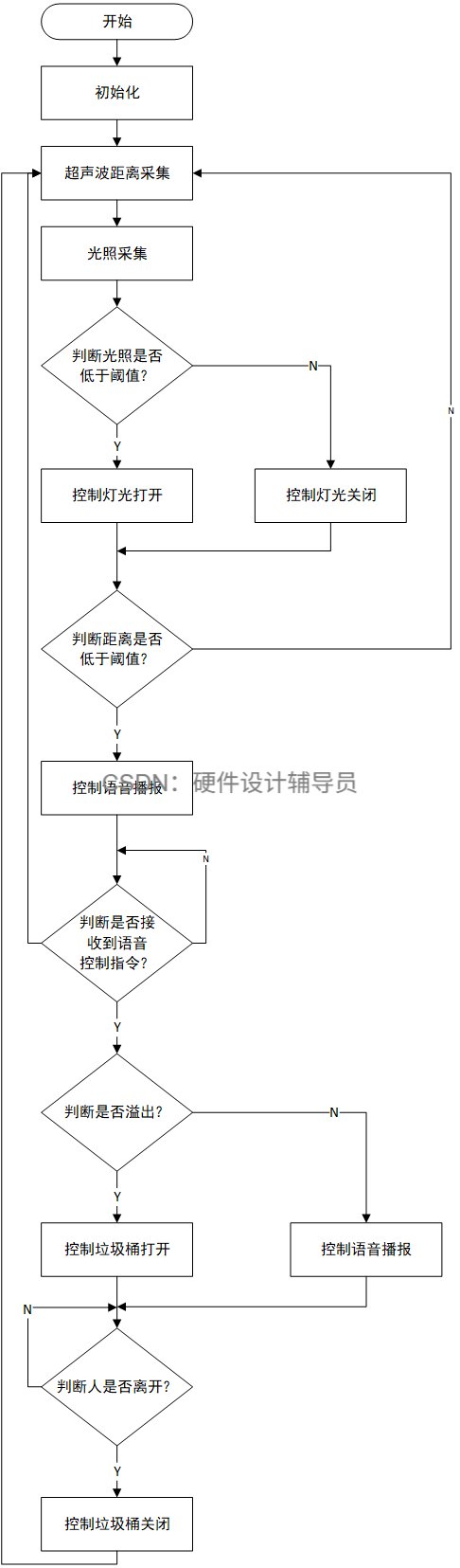
人体感应与语音提示:
- 采用超声波传感器实时检测人是否靠近,当检测到有人接近时,系统会自动触发语音模块播放“垃圾分类”的提示音,以引导用户正确投放垃圾。
-
自动关门功能:
- 当检测到人离开后,系统会延时3秒,随后通过步进电机反转,模拟关闭垃圾箱门,确保垃圾箱在无人时保持封闭状态。
-
垃圾箱状态检测:
- 系统能够实时监测垃圾箱的填充状态,一旦检测到垃圾箱已满,便会触发语音提示“垃圾箱已满”,提醒用户及时清理。
-
夜灯功能:
- 集成光传感器的设计使得夜灯能够智能调节,白天时自动关闭,夜晚则自动开启,为用户提供必要的照明,增加使用便利性。
-
语音识别开箱:
- 系统支持语音识别功能,用户可以通过语音指令自动开启不同类型的垃圾箱,实现便捷的垃圾分类投放,提升了用户的操作体验。

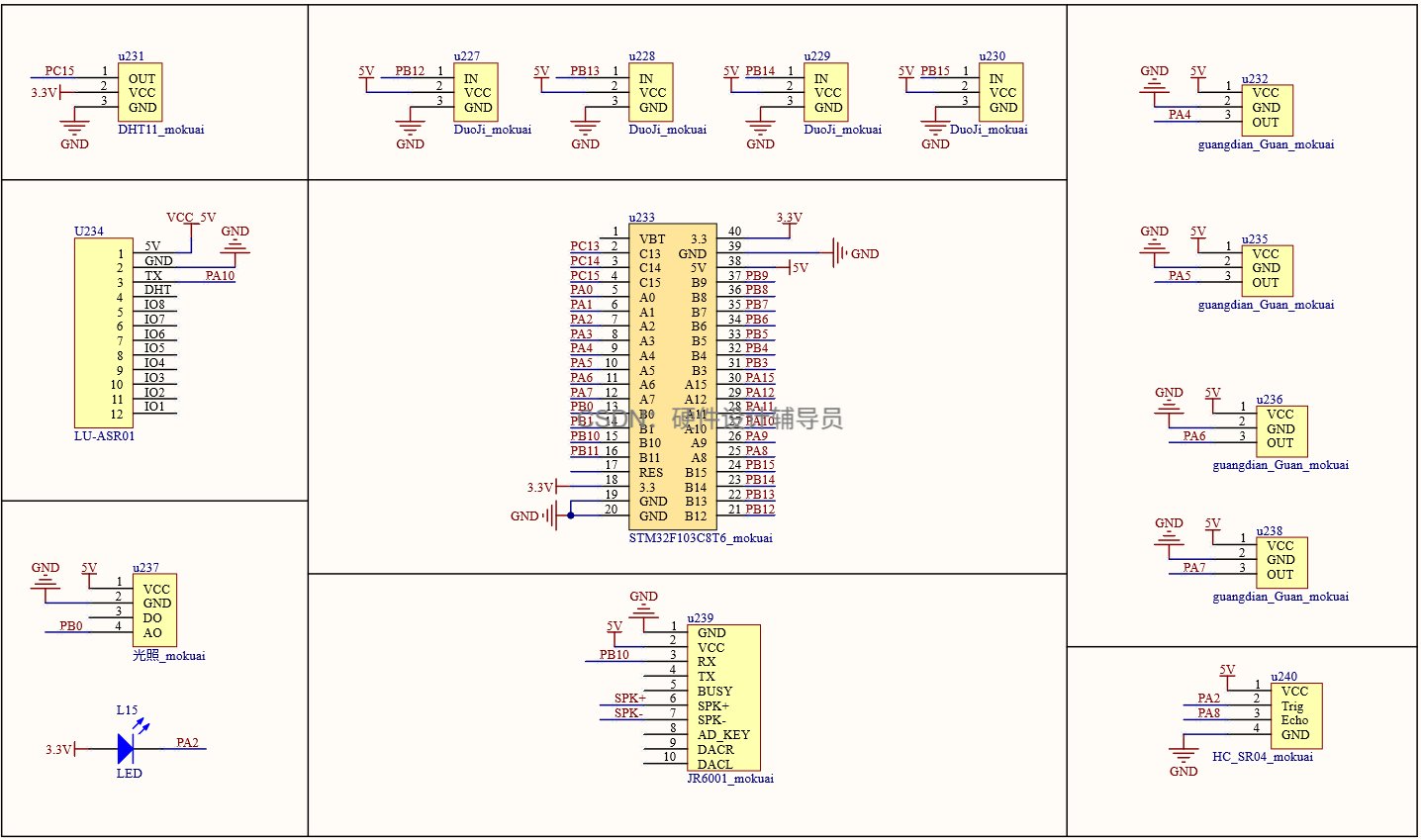
二.电路设计
-
主控单元:
- 采用STM32F103C8T6单片机作为整个系统的控制核心,构成最小系统电路,负责协调各个模块的工作。
-
障碍物检测:
- 使用HC-SR04超声波测距模块进行前后障碍物的检测。该模块的Echo(超声波接收脚)和Trig(超声波发射脚)分别连接到单片机的GPIO引脚,实现实时距离测量。
-
路径识别:
- 采用红外对管进行黑色路径的识别。红外对管的输出数字信号通过GPIO口连接至单片机,用于判断路径状态。
-
光强检测:
- 使用光敏电阻模块进行环境光强的检测。传感器的模拟输出端连接至单片机的模拟输入端,以实现光强的实时监测。
-
语音指令检测:
- 集成LU-ASR01高精度语音识别模块,用于检测用户的语音指令。该模块通过UART串口与单片机进行通信,确保指令的准确识别。
-
垃圾桶控制:
- 通过舵机实现垃圾桶的自动打开和关闭。舵机的控制线连接至单片机的GPIO口,以便实现精确控制。
-
语音播报:
- 使用JR6001模块进行语音播报,该模块同样通过UART串口与单片机连接,以提供语音反馈功能。

三.程序设计
#include “sys.h”
#include “delay.h”
#include “math.h”
#include “adc.h”
#include “key.h”
#include “OLED_I2C.h”
#include “Control_Report_To_Police.h”
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置中断优先级分组为组2:2位抢占优先级,2位响应优先级
delay_init(); //延时函数初始化
Usart1_Init(9600);
Servor_GPIO_Config_Time2_Init();
switch_Init();
Led1_init();
Hcsr04_Timer6_Init();
Adc_Init();
OLED_Init(); //OLED初始化
OLED_CLS(); //OLED清屏
OLED_CLS();
while(1)
{
OLED_Display_Cotrol(); //显示控制函数
}
}
四.资料内容
24-32-80

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 6
6 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)