论文精读:PyLabRobot: An open-source, hardware-agnostic interface for liquid-handling robots and accessor
PyLabRobot是一个通用的、开源的Python接口,能够为液体处理机器人和配件提供跨平台的编程支持。通过命令级控制和标准化的操作,PyLabRobot提高了实验室自动化的效率和可重复性。实验结果表明,PyLabRobot在多种操作系统上具有良好的兼容性,能够支持复杂的液体处理协议。该框架的开放性和灵活性将促进实验室自动化领域的发展和资源共享,推动生物学研究的进步。这篇论文提出了PyLabRo
·
PyLabRobot: An open-source, hardware-agnostic interface for liquid-handling robots and accessories
研究背景
- 研究问题:这篇文章要解决的问题是如何为液体处理机器人和配件提供一个通用的、开源的Python接口,以便研究人员能够跨平台编程这些设备,并加速实验室自动化的发展。
- 研究难点:该问题的研究难点包括:现有的专有接口限制了其互操作性和共享性;缺乏一个跨平台的命令级控制接口;以及需要解决不同硬件和操作系统之间的兼容性问题。
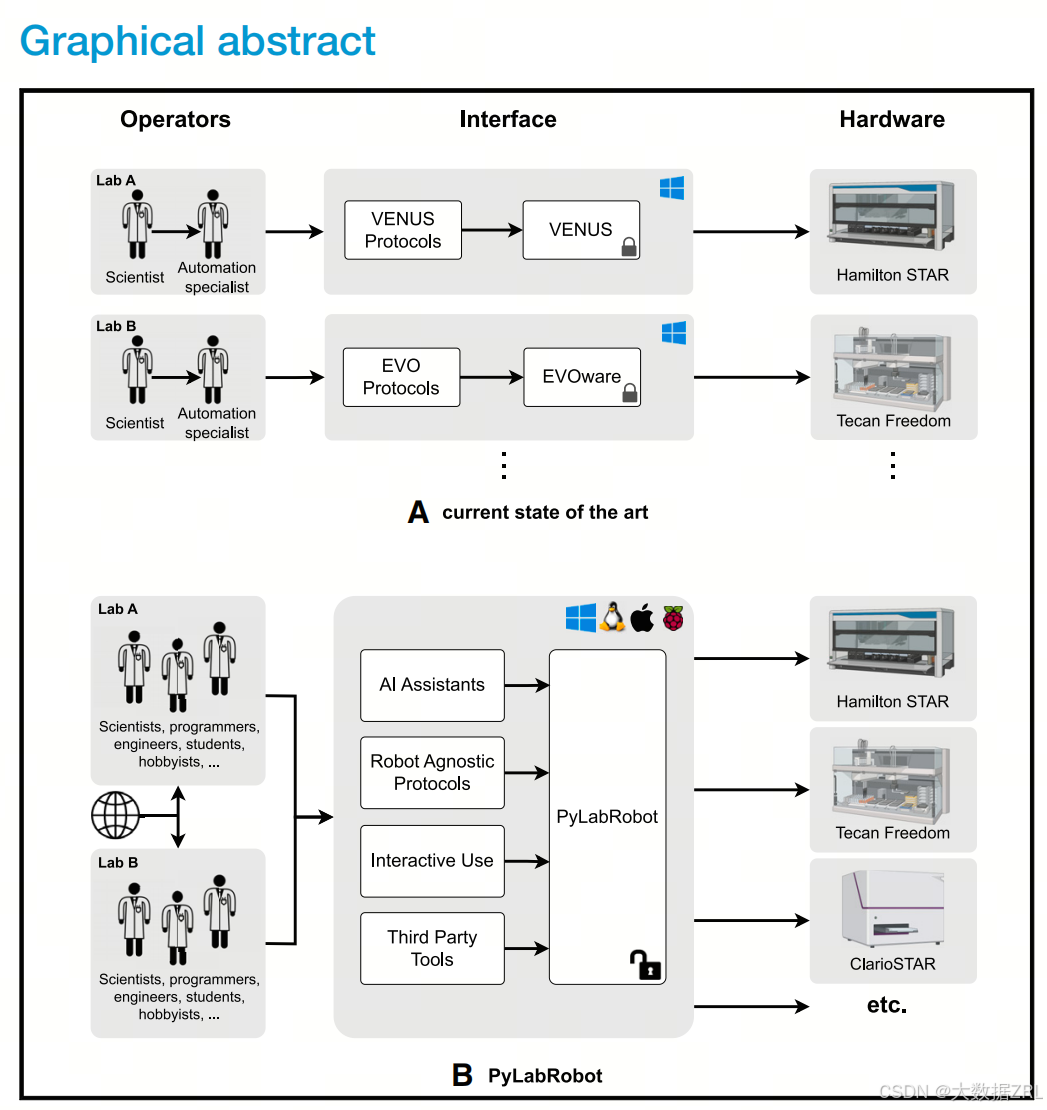
- 相关工作:该问题的研究相关工作包括Hamilton VENUS、Tecan EVOware、Opentrons等专有软件,以及PyHamilton、SiLA、LabOp等项目,但这些项目要么不支持跨平台操作,要么不支持命令级控制。
研究方法
这篇论文提出了PyLabRobot,用于解决液体处理机器人和配件的跨平台编程问题。具体来说,
- 跨平台支持:PyLabRobot支持Windows、macOS、Linux和Raspberry Pi OS等多种操作系统,提供了一个统一的接口来控制不同的液体处理机器人。

- 命令级控制:用户可以通过原子级命令控制机器人,从而实现更高的灵活性和精确性。PyLabRobot的接口层包括LiquidHandler类,用于与机器人通信,后端类(如TecanFreedomEVOBackend)负责将通用命令转换为特定机器人的命令。
- 标准化操作:定义了四个基础的液体处理操作(吸液、注液、拾取吸头、放下吸头),并通过LiquidHandler和LiquidHandlerBackend类实现这些操作。这些操作可以组合成复杂的协议,如稀释操作(serially_dilute)。
- 资源模型:使用Resource类及其子类来表示实验室耗材和设备的位置和属性。Resource模型支持资源的动态添加和修改,使得协议可以在运行时进行调整。

- 模拟器:为了降低进入实验室自动化领域的门槛,开发了一个基于浏览器的模拟器,允许用户在无实际硬件的情况下测试和验证协议。
实验设计
- 数据收集:实验设计包括对PyLabRobot框架的单元测试和应用演示。测试涉及多种液体处理机器人和配件,如Hamilton STAR、Tecan Freedom EVO和Opentrons OT-2。
- 实验步骤:实验步骤包括:实例化LiquidHandler类并配置后端;使用模拟器进行协议测试;验证资源模型和位置计算;评估命令级控制的灵活性。
- 样本选择:选择了多种常见的实验室耗材和设备,如吸头架、微孔板、移液器和读板器,以全面评估PyLabRobot的功能。
- 参数配置:在实验中,配置了不同的液体处理参数,如吸液体积、注液体积、流速等,以测试框架在不同操作条件下的性能。
结果与分析
- 跨平台兼容性:PyLabRobot成功地在Windows、macOS、Linux和Raspberry Pi OS上运行,验证了其跨平台兼容性。
- 命令级控制的灵活性:通过命令级控制,用户可以实现复杂的液体处理协议,如同时进行的多次吸液和注液操作。实验结果表明,PyLabRobot能够高效地执行这些操作,且误差率较低。
- 资源模型的准确性:Resource模型能够准确地表示实验室耗材和设备的位置和属性,支持资源的动态添加和修改。实验中,资源模型在模拟器和实际硬件上的表现一致。
- 模拟器的有效性:模拟器能够准确反映机器人在不同操作条件下的行为,允许用户在无实际硬件的情况下进行协议测试和调试。
总体结论
PyLabRobot是一个通用的、开源的Python接口,能够为液体处理机器人和配件提供跨平台的编程支持。通过命令级控制和标准化的操作,PyLabRobot提高了实验室自动化的效率和可重复性。实验结果表明,PyLabRobot在多种操作系统上具有良好的兼容性,能够支持复杂的液体处理协议。该框架的开放性和灵活性将促进实验室自动化领域的发展和资源共享,推动生物学研究的进步。
优点与创新
- 通用性和开放性:PyLabRobot是一个开源的、跨平台的Python接口,能够在Windows、macOS、Linux和Raspberry Pi OS上运行,支持多种液体处理机器人和配件。
- 硬件无关性:通过统一的接口和标准化的命令集,PyLabRobot实现了对不同品牌和型号的液体处理机器人的兼容,简化了协议的开发和共享。
- 交互式编程环境:PyLabRobot提供了浏览器模拟器和交互式工具(如REPL和Jupyter Notebook),使得研究人员可以快速进行协议调试和迭代。
- 丰富的功能:支持基本的液体处理操作(如吸取、分配、移动资源等)以及复杂的复合操作,提供了灵活的操作方式。
- 社区支持:PyLabRobot有一个活跃的开发者社区,鼓励用户贡献代码、分享经验和解决问题。
- LLM助手集成:PyLabRobot可以与大型语言模型(LLM)助手(如OpenAI的GPT-3.5)集成,使得没有编程经验的研究人员也能使用液体处理机器人。
- 模拟器:提供了一个基于浏览器的模拟器,允许用户在无实际硬件的情况下进行实验设计和验证。
- 图形化布局编辑器:开发了一个图形化实验室布局编辑器,使得设计实验台布局更加直观和快捷。
不足与反思
- 硬件兼容性:虽然PyLabRobot已经支持多种液体处理机器人,但随着新硬件的出现,可能需要不断更新和维护以保持兼容性。
- 用户界面:当前的用户界面和功能可能还需要进一步优化,以提高用户体验和易用性。
- 错误处理:虽然PyLabRobot利用Python的异常处理机制,但在某些情况下,错误处理和反馈机制还可以进一步完善。
- 社区贡献:尽管社区活跃,但如何更好地组织和激励社区成员参与项目的持续改进仍然是一个挑战。
关键问题及回答
-
问题1:PyLabRobot如何实现跨平台支持?
- PyLabRobot通过使用跨平台的Python库和操作系统抽象层来实现跨平台支持。具体来说,PyLabRobot的核心代码在Python中编写,并使用asyncio库来处理异步操作,使其能够在Windows、macOS、Linux和Raspberry Pi OS上运行。此外,PyLabRobot的后端类(如TecanFreedomEVOBackend)负责将通用的命令转换为特定机器人的命令,这些后端类针对不同操作系统进行了适配,确保PyLabRobot可以在不同平台上无缝运行。
-
问题2:PyLabRobot的命令级控制有哪些优势?
- 灵活性:命令级控制允许用户以原子级命令操作机器人,从而实现更高的灵活性和精确性。例如,用户可以同时控制多个通道的吸液和注液操作,这在传统的高级协议控制中是难以实现的。
- 易用性:命令级控制简化了协议的编写过程,特别是对于经验丰富的用户。用户可以直接调用底层命令,而不需要依赖图形界面或高级封装库。
- 可扩展性:命令级控制使得编写新的机器人后端变得容易。开发者只需关注特定硬件的命令集,而不需要重新实现整个协议栈。这大大降低了新硬件集成的难度和时间。
-
问题3:PyLabRobot的资源模型是如何设计的?
- PyLabRobot的资源模型使用Resource类及其子类来表示实验室耗材和设备的位置和属性。每个资源实例通过其名称属性在甲板布局中表示为唯一标识符。资源的语义关系存储在一个有向根树中,树的根是甲板。资源的位置信息存储在其location属性中,该属性定义了资源相对于其父资源的位置。通过递归累加父资源的位置,可以计算出资源的绝对位置。这种设计支持资源的动态添加和修改,使得协议可以在运行时进行调整。

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 25
25 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)