深入理解Vision Transformer:理论与代码实战
深度学习是机器学习的一个子集,它使用神经网络来模拟人脑对数据进行处理的方式。通过大量的数据,深度学习模型能够自动学习到数据的特征表示,这在图像和语音识别等领域中尤为有效。深度学习的关键在于深度神经网络,即具有多个隐藏层的网络,它们可以帮助系统从简单的特征中抽象出复杂的表示。Transformer模型首次在2017年发表的论文《Attention is All You Need》中被提出,其独特的自

简介:Vision Transformer(ViT)代表了计算机视觉领域的一个重大进步,其利用Transformer架构处理图像数据,突破了传统CNN的局限。本系列旨在通过深入探讨ViT的基本原理和实际代码示例,帮助读者掌握Transformer的核心概念及其在图像处理任务中的应用。内容涵盖自我注意力机制、多头注意力、位置编码等关键组件,并提供实践项目来加深理解。本资料包包含详细的理论文档、数据集和实验结果记录,适用于所有深度学习学习者。 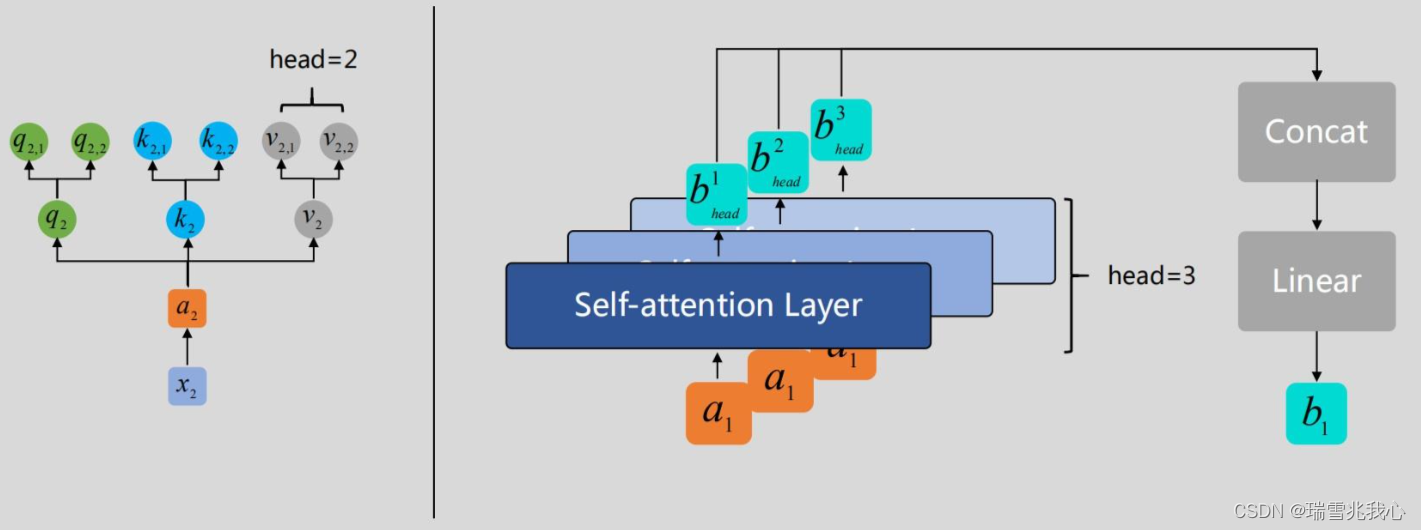
1. 深度学习和Transformer基础
在信息爆炸的当今世界,深度学习已成为许多技术进步的核心驱动力。其中,Transformer模型凭借其在自然语言处理(NLP)领域的突破性成就崭露头角。本章将介绍深度学习的基本概念,并探讨Transformer模型的基础知识,为理解后续章节打下坚实的理论基础。
1.1 深度学习简介
深度学习是机器学习的一个子集,它使用神经网络来模拟人脑对数据进行处理的方式。通过大量的数据,深度学习模型能够自动学习到数据的特征表示,这在图像和语音识别等领域中尤为有效。深度学习的关键在于深度神经网络,即具有多个隐藏层的网络,它们可以帮助系统从简单的特征中抽象出复杂的表示。
1.2 Transformer模型的兴起
Transformer模型在2017年被引入到NLP领域,其革新之处在于完全依赖自注意力机制(Self-Attention),而非传统的循环神经网络(RNN)或卷积神经网络(CNN)。这种自注意力机制能够让模型在处理序列数据时更加高效,尤其是在捕捉长距离依赖关系方面。
Transformer模型由编码器和解码器组成,其中编码器负责输入序列的处理,而解码器负责输出序列的生成。自注意力机制允许模型在编码每个元素时,同时考虑序列中的所有元素,这样就无需像RNN那样依次处理序列。
在接下来的章节中,我们将深入探讨Transformer模型在计算机视觉领域的扩展,即Vision Transformer(ViT),以及它如何在各种视觉任务中获得突破性的进展。
2. Vision Transformer原理
2.1 Transformer的起源和结构
2.1.1 NLP中的Transformer模型概述
Transformer模型首次在2017年发表的论文《Attention is All You Need》中被提出,其独特的自注意力机制和并行计算能力迅速在自然语言处理(NLP)领域引起了革命性的变革。Transformer摒弃了传统的循环神经网络(RNN)和长短时记忆网络(LSTM)的序列依赖性,通过自注意力机制对序列内的所有元素进行建模,从而更好地捕捉长距离依赖。
Transformer模型包含两个主要部分:编码器(Encoder)和解码器(Decoder)。编码器负责处理输入数据,如文本、图像等,并生成上下文相关的表示;解码器则接收编码器的输出,并通过另一套自注意力机制生成最终输出,如翻译的文本。
自注意力机制的核心是计算序列中每个元素对其他元素的注意力分数,并基于这些分数对输入向量进行加权求和,形成输出表示。这种机制能够直接关联序列内的任何位置,是Transformer能够有效处理长序列的关键所在。
2.1.2 自注意力机制的工作原理
自注意力机制允许模型在处理序列中的每个元素时,同时考虑整个序列中的其他元素,从而学习到更为丰富的上下文信息。这在处理语言或图像等结构化数据时尤为重要,因为这些数据的各部分之间存在复杂的依赖关系。
自注意力机制涉及三个主要的权重矩阵:查询(Query)、键(Key)、值(Value)。对于输入序列的每个元素,模型首先计算查询向量、键向量和值向量。通过计算查询向量和每个键向量之间的点积,得到注意力分数,然后通过softmax函数对这些分数进行归一化,以形成一个概率分布。最后,使用这个分布对值向量进行加权求和,得到最终的输出。
通过学习这些注意力权重,模型可以聚焦于序列中最相关的部分,以此来更好地理解输入。这种机制的并行计算特性,大大加快了训练速度,并允许模型在更大的数据集上进行训练,从而学习更加复杂的模式。
2.2 Vision Transformer的提出和发展
2.2.1 将Transformer引入计算机视觉的创新思路
Vision Transformer(ViT)是将Transformer模型从NLP领域扩展到计算机视觉领域的一个突破。之前,卷积神经网络(CNN)一直是图像处理领域的主导模型,因其出色的特征提取能力和层次化结构,能够有效捕捉图像中的空间关系。然而,Transformer的自注意力机制为捕获全局依赖提供了新途径,尤其在大规模数据集上训练时,其性能表现出色。
ViT的创新之处在于它将图像分割成序列化的patches,并将这些patches作为Transformer模型的输入。这种方法类似于NLP中的词向量处理方式,将图像信息转化为序列数据处理。ViT在预训练阶段使用大规模数据集学习通用的图像特征表示,然后在下游任务中进行微调。
ViT的一个关键优点是其简单性和灵活性。它没有复杂的手工设计特征抽取模块,而是完全依赖于自注意力机制和多层Transformer编码器来学习特征。这使得ViT在很多视觉任务中能够与甚至超越CNN的表现,尤其是当训练数据非常丰富时。
2.2.2 模型结构与工作流程详解
ViT模型的基本结构与NLP领域的Transformer编码器非常相似,主要由以下几个部分组成:
-
Patch Embedding:将输入图像分割成固定大小的patches,并将每个patch展平成一个向量。然后,为每个patch向量添加一个可学习的位置嵌入,以保留图像中的空间信息。
-
Transformer Encoder:通过多层Transformer编码器对嵌入后的patch向量序列进行处理。每个编码器层包含多头自注意力机制和前馈神经网络。自注意力机制使得ViT能够学习到patches之间的全局依赖关系。
-
Output Layer:在Transformer编码器处理完序列后,通常会有一个全连接层来生成最终的分类或其他任务的输出。
在训练ViT时,通常会在大规模的数据集上进行预训练,学习一个泛化的特征表示。随后,在特定的下游任务上进行微调,调整模型参数以适应新任务。这种训练策略类似于迁移学习,允许模型在较少的数据上快速适应新任务。
ViT的工作流程如下:
- 将输入图像切分成小块(patches)。
- 将这些patches转换成序列化的向量,并添加位置信息。
- 将这些序列化的向量输入到Transformer编码器中进行特征提取。
- 经过若干编码器层后,使用输出进行下游任务,如图像分类、目标检测等。
整个ViT的流程可以用以下伪代码概括:
def vision_transformer(image, patches, transformer_encoder, output_layer):
# 提取patches并展平
patches_flattened = extract_and_flattenpatches(image, patches)
# 添加位置嵌入
embedded_patches = add_position_embeddings(patches_flattened)
# 通过Transformer编码器
encoded_image = transformer_encoder(embedded_patches)
# 生成最终输出
output = output_layer(encoded_image)
return output
每个步骤的详细解释和参数说明将在后文给出。通过这一流程,ViT能够将复杂的图像信息转化为丰富的特征表示,进而在各种视觉任务中获得优秀的性能表现。
3. 图像处理中的Transformer应用
3.1 图像分类任务的Transformer解决方案
3.1.1 传统图像分类方法与Transformer的比较
在传统图像分类方法中,卷积神经网络(CNN)一直以来都是解决图像识别和分类问题的主要工具。CNN通过局部感知和权重共享的方式极大地减少了模型参数的数量,同时有效地提取空间特征。然而,CNN在处理远程依赖关系时存在局限性,因为它的感受野受限于其设计的卷积核大小和层数。此外,CNN的层级结构使得它需要大量的工程知识来设计高效的网络架构。
相比之下,Transformer模型,特别是Vision Transformer(ViT),通过将图像分割成多个patches并进行线性嵌入来处理图像,然后利用自注意力机制在全局范围内捕获信息,可以更好地处理长距离依赖问题。ViT不依赖于层级结构,而是通过多头注意力机制并行捕捉不同位置的特征关系,从而具有更强的特征表示能力。
3.1.2 ViT在图像分类中的优势与挑战
ViT在图像分类任务中展现出了明显的优势。首先,通过自注意力机制,ViT能够在整个图像的范围内识别特征,而不仅仅是局部区域。其次,ViT能够更灵活地处理不同大小的输入图像,其参数量通常比同等性能的CNN模型要少。最后,ViT的可扩展性较好,容易适配到更大规模的数据集和更复杂的任务。
然而,ViT也面临着一些挑战。它需要大量的数据来进行有效训练,这对于数据稀缺的问题场景可能不适用。另外,ViT的计算成本相对较高,尤其是在处理高分辨率图像时。最后,ViT的训练需要更多的技巧和调整,例如学习率调度、正则化技术等,以避免过拟合和提高泛化能力。
3.2 其他视觉任务中的Transformer应用
3.2.1 目标检测和语义分割的Transformer框架
目标检测和语义分割是计算机视觉中的两个重要任务,它们要求模型不仅要识别图像中的对象,还要定位对象的位置并理解图像中每个像素的语义信息。传统的CNN模型在这些任务中取得了很好的效果,但Transformer的引入为这些任务提供了新的可能性。
在目标检测任务中,Transformer可以用于替代传统的区域提议网络(RPN)和检测头。例如,DETR(Detection Transformer)模型通过一个编码器-解码器架构来直接预测目标的类别和边界框。Transformer的自注意力机制使得每个目标的预测可以与图像中的其他位置直接关联,从而改善了检测性能。
在语义分割任务中,Transformer可以用来学习全局上下文信息,这对于理解复杂的场景布局至关重要。例如,Swin Transformer在分割网络中表现出色,通过使用分层结构和移动窗口机制,它在保持计算效率的同时,提升了特征的层次化学习能力。
3.2.2 视频理解与生成模型中的应用案例
视频理解任务涉及从视频序列中提取信息,包括行为识别、活动预测等。Transformer由于其自注意力机制,在处理长序列数据方面表现出色,因此在视频任务中具有天然的优势。
例如,TimeSformer通过将视频分解为一系列的帧patches,然后利用Transformer处理这些帧,从而在视频分类、动作识别等任务中取得了突破性的进展。TimeSformer不仅能够捕获空间特征,还能够理解时间序列信息,这对于视频理解至关重要。
在生成模型中,Transformer也被广泛应用。例如,在生成对抗网络(GAN)中,Transformer可以用来生成高质量的图像。与传统的基于卷积的GAN相比,基于Transformer的生成模型如TransGAN能够生成更加精细和多样化的图像内容。
在上述章节中,我们探讨了Transformer在图像处理领域的应用,特别是在图像分类、目标检测、语义分割以及视频理解与生成模型中的应用案例。Transformer模型在捕捉全局信息和处理长距离依赖关系方面的优势使其在各种视觉任务中展现出独特的潜力。然而,它也面临着数据需求量大、计算成本高以及需要细致调整等挑战。在下一章中,我们将深入探讨Transformer模型的核心——自我注意力机制及其变种,多头注意力机制,以及它们在视觉任务中的具体表现。
4. 自我注意力机制和多头注意力
4.1 自我注意力机制详解
4.1.1 自我注意力的数学原理
自我注意力机制是一种特殊的神经网络结构,其核心思想在于通过给定输入序列内的每个元素赋予不同的重要性权重来生成新的表示。在数学上,可以将自我注意力表示为一个查询(Q)、键(K)和值(V)的矩阵变换过程。具体来说,对于序列中的每个元素,我们首先生成相应的Q、K、V矩阵。然后,通过计算Q和K的相似度或相关度来得到注意力分数。这个过程一般通过点乘和softmax函数实现,使得分数具有可解释性,并且能够规范化。接着,将注意力分数与V矩阵相乘,从而为每个元素生成加权的值表示,即最终的注意力输出。
自我注意力机制具有以下特点:
- 并行计算 :所有位置的计算可以同时进行,这与基于循环的序列模型(如RNNs)形成鲜明对比。
- 长距离依赖 :由于注意力权重的计算不依赖于序列的位置,因此自我注意力能够有效地捕捉长距离依赖。
- 动态权重 :不同的输入序列元素可以根据其相关性被赋予不同的权重,这为模型提供了更大的灵活性。
4.1.2 如何通过自注意力捕捉图像特征
在计算机视觉中,自我注意力机制被用来捕捉图像中的复杂模式和关系。不同于传统的卷积神经网络(CNN),自我注意力不依赖于图像局部区域的固定大小的感受野,而是能够在全局范围内关联图像的不同部分。
自我注意力在图像特征捕捉中的应用步骤通常包括以下几个方面:
- 特征映射 :首先将图像划分成一系列的patch(小块),然后将每个patch展平并通过线性层映射成高维表示,即Q、K、V。
- 计算注意力图 :通过Q、K矩阵的相互作用计算出注意力图,这一步骤可以通过多头注意力机制进行扩展,从而捕捉更丰富的特征信息。
- 加权求和 :利用注意力图对V矩阵进行加权求和,得到带有全局信息的特征表示。
- 特征融合 :将加权后的特征表示与原始的局部特征融合,形成更全面的特征表达。
通过自我注意力机制,模型能够赋予图像中重要的区域更高的权重,使得模型可以专注于那些对于理解图像内容至关重要的部分。例如,在图像分类任务中,注意力机制可以帮助模型区分前景和背景,或者关注于某些显著的图像部分,进而提高分类的准确性。
4.2 多头注意力的工作机制
4.2.1 多头注意力的设计初衷与优势
多头注意力机制是Transformer模型的核心组件之一,它通过同时学习输入序列的多个表示子空间来增强模型的能力。多头注意力的设计初衷是让模型能够从不同的角度捕捉输入序列的信息,类似于人类在处理复杂问题时会从多个视角进行思考。
多头注意力的主要优势包括:
- 更丰富的特征表示 :通过多个头来捕捉输入序列的不同方面,每个头可以关注数据的不同部分和不同类型的特征。
- 更大的模型容量 :多头机制使得模型能够同时处理更多并行的信息,增加了模型的容量,这对于处理复杂的数据模式尤为重要。
- 增强学习能力 :多头注意力能够同时在多个子空间内进行学习,这有助于模型抓住数据中细粒度的特征,并提高对不同特征组合的学习能力。
4.2.2 多头注意力在视觉任务中的表现
在视觉任务中,多头注意力机制允许模型在多个子空间内学习图像特征的组合。这有助于模型更好地处理图像中的细节和全局结构信息,对于理解图像中复杂的视觉模式具有重要作用。
多头注意力在视觉任务中的应用步骤通常包括:
- 分头处理 :将输入特征Q、K、V分别映射到多个不同的子空间(即多个头),并对每个头的输出进行独立的注意力计算。
- 特征融合 :将各头的注意力输出拼接起来,并通过另一个线性层进行最终的特征融合。
- 并行学习 :多头机制允许模型并行地学习图像特征,这加快了训练速度并改善了性能。
多头注意力的一个关键特点是其能够提供一种灵活的方式,用于捕捉图像中的不同模式和结构。例如,在图像分类任务中,不同的头可以捕捉到形状、纹理、颜色等不同的特征,使得模型能够更加全面地理解图像内容。在目标检测和语义分割任务中,多头注意力同样可以用于捕捉上下文信息和长距离依赖关系,这有助于提高模型在复杂场景下的表现。
5. 位置编码在ViT中的应用
5.1 位置编码的必要性
5.1.1 位置信息在视觉任务中的重要性
在视觉任务中,图像像素具有明确的几何位置关系,而Transformer模型本身并不具备处理这种空间信息的能力。位置编码是解决这一问题的关键手段,它允许模型理解元素之间的相对或绝对位置信息。没有位置编码,Transformer在处理序列数据时会忽略序列中元素的顺序信息,这在视觉任务中将导致性能的显著下降。
5.1.2 位置编码与序列处理的不同
对于自然语言处理(NLP)任务,序列中的元素通常是按顺序排列的单词。而在计算机视觉任务中,像素或图像块的位置关系非常关键。因此,在引入位置编码时需要考虑到视觉任务的特点,如何有效地嵌入位置信息,以帮助模型区分图像中的不同区域。
5.2 位置编码的实现与优化
5.2.1 常见的位置编码技术比较
在ViT中,有几种位置编码方法可供选择:
- 固定位置编码 :一种是直接将位置信息编码为向量,这些向量通过特定的方式结合到输入序列中。例如,Sinusoidal Positional Encoding就属于此类。
- 学习式位置编码 :另一种方法是通过网络学习位置信息,这涉及到模型在训练过程中自己发现和利用位置信息的能力。学习式位置编码与固定位置编码相比,理论上更能适应不同任务的需求。
下面给出一个简单的Sinusoidal位置编码实现的示例:
import torch
import numpy as np
def get_sinusoidal_position_encoding(max_len, d_model):
position = torch.arange(max_len).unsqueeze(1)
div_term = torch.exp((torch.arange(0, d_model, 2) * -(np.log(10000.0) / d_model)).to(torch.float))
pe = torch.zeros(max_len, 1, d_model)
pe[:, 0, 0::2] = torch.sin(position * div_term)
pe[:, 0, 1::2] = torch.cos(position * div_term)
return pe
# 示例:为序列长度为100和模型维度为512创建位置编码
pe = get_sinusoidal_position_encoding(100, 512)
print(pe.shape) # 输出位置编码的形状
在实际应用中,位置编码通常会被添加到Transformer的输入嵌入中,这样模型就可以在训练过程中学习到输入序列中的位置信息。
5.2.2 如何在ViT中有效地应用位置编码
在使用位置编码时,我们需要考虑如何与ViT的其他部分协同工作。位置编码的实现需要确保它不会干扰到模型学习视觉特征的能力。一个有效的策略是通过多次的训练和验证来调整位置编码的尺度和表达形式,确保它们能够和模型的其他部分相适应。此外,位置编码也需考虑其对于计算资源的影响,因为它会在模型的前向传播中增加额外的计算负担。
结合位置编码的Transformer模型,能够在处理视觉任务时,保留并利用图像中丰富的空间关系信息,这在图像分类、目标检测等任务中尤为重要。通过适当的选择和优化位置编码方法,可以显著提高ViT在各种视觉任务中的表现。
位置编码技术的深入探索和优化,将为ViT在计算机视觉领域的应用带来更广泛的可能性,使其能够更好地理解和处理复杂的视觉信息。
6. 图像分类、目标检测、语义分割等任务中的ViT应用
6.1 ViT在图像分类任务中的应用
6.1.1 模型架构与训练技巧
在计算机视觉任务中,Vision Transformer (ViT) 已经证明了其在图像分类上的强大能力。与传统的CNN架构相比,ViT通过将图像切分成固定大小的 patches 来表示,然后将这些 patches 当作序列数据输入到 Transformer 中处理。这种处理方式允许模型捕捉图像的全局信息和更丰富的上下文关系。
在模型架构上,ViT 基本上复用了原始 Transformer 模型的结构,包括多个自注意力层和前馈网络层。每层自注意力允许模型在处理每个 patch 时能够捕捉到其它 patches 的信息。这种全局交互能力是传统 CNN 结构难以实现的。
在训练技巧方面,ViT 可以通过预训练模型和迁移学习来加速收敛和提高性能。在预训练阶段,可以通过大规模的数据集(如 ImageNet)来学习通用的图像表示。随后,针对特定任务进行微调,可以使用较小的数据集或任务特定的增强技术。
此外,ViT 训练时的一大挑战在于计算成本。由于自注意力机制需要处理序列中的每一对元素,计算复杂度是平方级别的。因此,通常在 ViT 中使用一些有效的技巧来减少计算量,例如稀疏注意力机制、低秩分解等。
6.1.2 预训练模型的迁移学习与微调
迁移学习和微调是深度学习中的常用技术,可以将在大规模数据集上学到的知识迁移到特定任务上。对于 ViT,通过在大型数据集上预训练,模型可以学习到丰富的视觉特征表示。然后在实际的任务中,可以冻结一些层,只对顶层或特定层进行微调,以适应特定任务的需求。
微调的策略可以根据可用数据的规模来调整。在数据量较少的情况下,可以仅微调最后几层;在数据量足够时,可以逐步微调更多的层,甚至全部层。微调过程中需要注意的是学习率的设置,通常微调阶段的学习率会比预训练阶段小,以避免破坏已学习到的特征。
此外,微调时还可以使用一些高级技术,比如正则化、学习率衰减策略等,以防止过拟合并提高模型的泛化能力。在特定任务的微调中,也可以结合任务相关的数据增强技术,进一步提升模型的性能。
6.2 ViT在目标检测与语义分割中的应用
6.2.1 捕获图像全局信息的优势
Vision Transformer 在目标检测和语义分割任务中相较于卷积神经网络(CNN)的一个重要优势在于其能够更好地捕获图像的全局信息。传统的 CNN 通常依赖于局部感受野,意味着单个卷积层的神经元只与输入图像的一个小区域相连。而 Transformer 的自注意力机制能够在一个更广阔的区域内捕捉特征之间的依赖关系,因此能够对图像中相距较远的部分进行有效编码。
例如,在目标检测任务中,Transformer 可以帮助模型更好地识别图像中的不同物体及其位置关系。这是因为它不仅能够关注到局部区域的特征,还可以通过自注意力机制识别全局上下文。这对于场景中存在多个物体相互遮挡或部分遮挡的情况尤其有用。
6.2.2 具体任务中的模型适配与创新点
在目标检测任务中,可以将 ViT 构建为一个两阶段的框架,其中第一阶段生成候选区域,第二阶段对候选区域进行分类和边界框回归。在这个框架中,Transformer 可以充当特征提取器的角色,或者在某些情况下,直接应用于区域提议网络(RPN)中。
在语义分割任务中,ViT 需要对图像的每个像素点进行分类。这要求模型能够理解上下文信息以及像素级别的细节信息。由于 ViT 自身的设计没有固定的接收场(receptive field)大小限制,可以通过堆叠多层自注意力来不断扩展其感受野,使其足以捕捉到复杂的语义关系。
为了适应这些任务的特殊需求,研究者们也在不断地对 ViT 进行创新和适配。一些创新点包括:
- 混合架构 :将 Transformer 和 CNN 的优点结合起来,使用 CNN 进行初步特征提取,然后将提取的特征转换为序列输入到 Transformer 中。
- 多尺度表示 :通过在多个不同尺度上应用 Transformer,同时捕捉图像中的细粒度和粗粒度信息。
- 位置敏感机制 :引入位置嵌入来提供像素级别的位置信息,这对于理解物体的形状和大小至关重要。
在实际应用中,Transformer 的这些适配和创新方法已经显示出在图像分类、目标检测和语义分割等任务中的巨大潜力。随着研究的深入和技术的发展,未来或许会有更多高效且精准的 ViT 变体被提出来应对各种视觉挑战。
7. 图像预处理和Transformer模型构建
在构建高效的视觉Transformer(ViT)模型之前,重要的是要了解图像预处理的步骤以及如何优化Transformer模型。良好的预处理可以提高模型的性能,而合适的模型构建策略可以避免过拟合并加快训练速度。
7.1 图像预处理的重要性与方法
图像预处理是机器学习中至关重要的一步,尤其在深度学习中,因为模型对数据的格式和分布非常敏感。良好的图像预处理可以减少计算资源的浪费,并使模型学习到更有用的特征。
7.1.1 数据增强与归一化处理
数据增强是一种通过生成训练样本的修改版本来扩充数据集的方法,这可以提高模型的泛化能力。常见的数据增强技术包括旋转、缩放、剪切、翻转和颜色调整。
数据增强代码示例:
from torchvision import transforms
data_transform = transforms.Compose([
transforms.Resize((224, 224)), # 调整图像大小
transforms.RandomHorizontalFlip(), # 水平翻转
transforms.RandomRotation(10), # 随机旋转
transforms.ToTensor(), # 转换为Tensor
transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]), # 归一化
])
归一化处理将图像数据缩放到一个固定的范围,例如[0,1]或者使用标准化方法转换为均值为0,方差为1的数据。
7.1.2 预训练数据集的选择与应用
选择合适的数据集对于模型训练至关重要,预训练数据集可以帮助模型从大规模图像中学习通用特征。常见的数据集包括ImageNet、COCO和PASCAL VOC等。
在训练ViT模型时,可以利用这些数据集来初始化权重,从而加速训练过程并提高模型的泛化能力。
7.2 Transformer模型的构建与优化
构建一个有效的Transformer模型需要对架构、参数和优化策略有深刻的理解。在这一节中,我们将探讨如何初始化模型参数,以及如何选择损失函数和优化器。
7.2.1 模型初始化与参数调整
初始化方法影响着模型训练的起始点,好的初始化可以避免梯度消失或爆炸的问题。例如,对于权重的初始化,常用的策略包括Xavier初始化和He初始化。
import torch.nn as nn
def initialize_weights_xavier(model):
for m in model.modules():
if isinstance(m, nn.Conv2d):
nn.init.xavier_uniform_(m.weight.data)
elif isinstance(m, nn.Linear):
nn.init.xavier_uniform_(m.weight.data)
if m.bias is not None:
m.bias.data.zero_()
# 初始化模型
initialize_weights_xavier(model)
除了初始化外,还应仔细调整学习率、批次大小和训练周期等超参数,以达到最佳的性能。
7.2.2 损失函数与优化器的选择
选择合适的损失函数和优化器对于模型训练同样重要。在分类任务中,交叉熵损失是一个常见的选择。而对于优化器,Adam或者AdamW通常表现良好,因为它们结合了动量和自适应学习率调整的特性。
损失函数和优化器代码示例:
model = ... # 已经定义的模型
loss_function = nn.CrossEntropyLoss() # 损失函数
optimizer = torch.optim.AdamW(model.parameters(), lr=1e-3) # 优化器
# 在训练循环中使用
for epoch in range(num_epochs):
for inputs, labels in dataloader:
optimizer.zero_grad()
outputs = model(inputs)
loss = loss_function(outputs, labels)
loss.backward()
optimizer.step()
在模型训练时,还应考虑使用学习率调度器来调整学习率,例如在训练的后期阶段减少学习率,以帮助模型收敛到更好的性能。
以上章节详细讨论了图像预处理和Transformer模型构建的细节,包括数据增强、归一化、初始化方法、损失函数和优化器的选择。通过这些步骤,我们可以为深度学习中的ViT模型提供坚实的基础,并优化其性能以适应不同的视觉任务。接下来,我们将探讨如何在实践中使用深度学习框架来实现ViT模型。
简介:Vision Transformer(ViT)代表了计算机视觉领域的一个重大进步,其利用Transformer架构处理图像数据,突破了传统CNN的局限。本系列旨在通过深入探讨ViT的基本原理和实际代码示例,帮助读者掌握Transformer的核心概念及其在图像处理任务中的应用。内容涵盖自我注意力机制、多头注意力、位置编码等关键组件,并提供实践项目来加深理解。本资料包包含详细的理论文档、数据集和实验结果记录,适用于所有深度学习学习者。

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 3
3 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)