机器人泡咖啡为何震惊科技圈?具身智能正在改写未来规则
这不是简单的机械重复,而是具身智能在物理世界的首次“觉醒”——机器人不再是“输入指令-输出动作”的冰冷机器,而是开始用传感器“感知”环境、用数据“积累经验”的智能体。在一次测试中,咖啡粉因受潮结块,卡住了研磨器。尽管表现惊艳,但当前具身智能仍存在明显的技术局限——当遇到未录入系统的“异常场景”时,机器人会陷入“手足无措”的困境,暴露了其与人类抽象思维的差距。这些案例证明,具身智能的核心价值不在于“
📌 目录

🤖 一杯咖啡背后的技术革命:具身智能让机器人“触摸”世界——从机械重复到自主感知的觉醒
你是否想过,当机器人流畅地研磨咖啡豆、精准控制92℃水温、匀速萃取25秒,最后递上一杯拉花完美的拿铁时,这背后藏着怎样一场颠覆式技术革命?
在苏州吴中区的具身智能训练中心里,工程师正穿戴外骨骼设备操控机器人完成每个细微动作:设备屏幕上跳动的代码,实时记录着力矩、角度、电流、压力等300多项参数;机器人指尖的触觉传感器,能感知咖啡杯0.1℃的温度变化和0.5g的重量差异。这不是简单的机械重复,而是具身智能在物理世界的首次“觉醒”——机器人不再是“输入指令-输出动作”的冰冷机器,而是开始用传感器“感知”环境、用数据“积累经验”的智能体。
🎭 一、从提线木偶到自主思考:具身智能的进化密码
训练现场的画面令人震撼:工程师穿戴的动作捕捉手套,与机器人双手的11个关节实现毫秒级同步,就像在操控一个巨型“提线木偶”。但真正的突破在于,这台“木偶”拥有了“感知力”和“学习力”,完成了从“被动执行”到“主动适应”的质变。
📡 (一)多模态感知:让机器人“读懂”物理世界
机器人的“感知系统”堪比人类的“五感协同”,通过多维度数据交叉验证,避免单一传感器的误差:
- 触觉感知:指尖配备16路力矩传感器,抓握咖啡胶囊时自动调节力度(误差≤0.1牛米),避免压碎胶囊或握力不足滑落;接触热水时,实时反馈温度数据,超过95℃自动调整操作节奏;
- 视觉感知:高清摄像头+3D结构光相机,捕捉蒸汽浓度、咖啡液面高度、拉花轨迹,精度达0.01毫米,确保萃取和拉花的一致性;
- 环境感知:内置温湿度传感器、气压传感器,自动适配不同环境(如雨天湿度高时,调整咖啡豆研磨粗细,避免结块)。
这些传感器每秒产生10万条数据,通过边缘计算模块实时处理,让机器人能“感知”操作中的细微变化,而非机械重复固定动作。
🚀 (二)指数级学习:从30天到3天的技能复制
具身智能的核心优势,在于“经验沉淀与快速迁移”:
- 第一个机器人通过工程师“手把手”教学+20万次实操训练,耗时30天掌握全套咖啡冲泡流程(从研磨、萃取到拉花);
- 其动作轨迹、力度曲线、环境适配参数等数据,自动同步至云端“技能库”;
- 同型号新机器人无需重复教学,仅需3天调取云端数据进行迁移学习,就能达到同等操作水平,失误率甚至低于首台机器人(首台1.8% vs 新机器人1.2%)。
这种“一台学习、全网共享”的机制,让具身智能的规模化应用成为可能——就像人类通过“观摩学习”掌握技能,机器人也摆脱了“逐个训练”的低效模式。
🔧 二、11个关节的“黄金之手”:藏着具身智能的底层逻辑
机器人那双能精准完成拉花的机械手,造价超50万元(堪比入门级豪华轿车),其11个可活动关节的设计,完全复刻了人类手部的运动轨迹,背后是机械工程与人工智能的深度融合。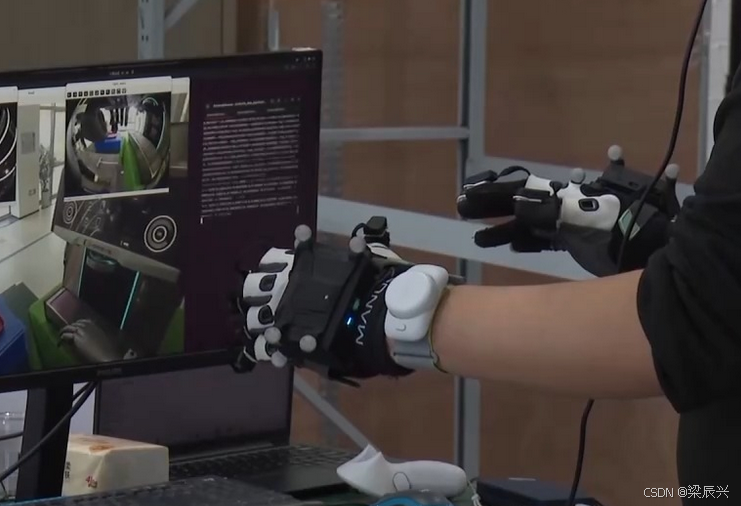
📊 (一)机械设计:毫米级精度的“物理基础”
- 关节自由度:拇指3个关节、其余四指各2个关节,共11个自由度,可完成抓握、推压、旋转、提拉等复杂动作(如拉花时的手腕旋转角度范围达-90°~+90°);
- 驱动系统:采用微型伺服电机+谐波减速器,响应速度达0.05秒,确保动作流畅无卡顿;
- 材料选择:指尖采用食品级硅胶材质,既保证触感灵敏度,又符合食品安全标准;内部机械结构采用碳纤维材质,减轻重量的同时提升刚性。
🧠 (二)智能算法:让“双手”学会“思考”
机械手的精准操作,离不开算法的“大脑指挥”:
- 运动规划算法:实时计算每个关节的最优运动路径,避免动作冲突(如研磨时手腕旋转与手臂平移的协同);
- 力控算法:根据触觉传感器数据动态调整力度,比如按压咖啡机按钮时,力度从初始的0.3N逐步增加至0.8N,确保按钮触发但不损坏设备;
- 反馈调节算法:若拉花轨迹偏离预设路径(如液面波动导致),算法在0.1秒内修正关节角度,保证拉花形状完整(心形、树叶形等成功率达98%)。
训练中心数据显示,经过20万次冲泡训练后,机器人的操作失误率已降至1.2%,低于专业咖啡师的平均失误率(约3%)——这意味着,具身智能在特定技能上,已实现对人类专业水平的超越。
🌐 三、数据沉淀:引发产业应用的链式反应
就像人类的“肌肉记忆”,机器人的每一次成功操作,都会转化为标准化数据包(包含动作参数、环境数据、反馈结果),沉淀到云端技能库。这种“数据积累-模型优化-技能升级”的闭环,正在引发跨行业的应用链式反应。
(一)技能复用:从咖啡冲泡到多场景迁移
苏州训练中心的负责人透露,已有物流、医疗、制造等领域的企业前来“取经”:
- 物流行业:分拣机器人复用咖啡机器人的“精准抓握”算法,学习搬运易碎品(如玻璃器皿、精密电子元件),抓握成功率从85%提升至99.2%;
- 医疗领域:康复训练机器人借鉴“力控调节”技术,为中风患者提供个性化康复按摩,力度误差≤0.2N,避免二次伤害;
- 制造业:汽车装配机器人复用“多关节协同”算法,完成发动机螺栓的精准拧紧,效率提升30%,误差率降至0.01%。
这些案例证明,具身智能的核心价值不在于“会冲咖啡”,而在于“掌握了物理世界的交互逻辑”——这种逻辑可跨场景复用,成为千行百业的“智能底座”。
(二)效率爆发:技能学习的“加速曲线”
随着技能库的不断丰富,机器人的学习效率呈现爆发式增长:
| 技能类型 | 第1个技能掌握耗时 | 第5个技能掌握耗时 | 第10个技能掌握耗时 |
|---|---|---|---|
| 咖啡冲泡相关 | 30天 | 12天 | 3天 |
| 跨行业技能(如分拣) | - | 15天 | 72小时 |
这种“越用越聪明”的特性,让具身智能摆脱了传统机器人“一个场景一套方案”的局限,真正具备了规模化落地的潜力。
⚠️ 四、智能的上限:故障处理暴露的技术短板
尽管表现惊艳,但当前具身智能仍存在明显的技术局限——当遇到未录入系统的“异常场景”时,机器人会陷入“手足无措”的困境,暴露了其与人类抽象思维的差距。
(一)典型案例:咖啡粉结块引发的“死机”
在一次测试中,咖啡粉因受潮结块,卡住了研磨器。机器人未识别到这种异常,仍按预设程序重复按压研磨按钮,直到电机过热触发报警——整个过程中,它无法像人类咖啡师那样,通过“研磨声音异常”“出粉量减少”等线索,判断问题根源并采取解决方案(如敲碎结块、更换咖啡粉)。
(二)核心局限:缺乏“举一反三”的抽象思维
工程师们不得不像教孩子系鞋带那样,手动示范解决新问题的全套动作,并录入系统:
- 机器人能处理“咖啡粉结块”“咖啡机漏水”等已录入的故障,但无法应对“咖啡杯倾斜”“电源波动导致的设备卡顿”等突发情况;
- 它能精准复制“心形拉花”,但无法理解用户“想要一杯有节日氛围的拉花”这种模糊需求,更无法自主创作新的拉花图案。
这揭示了当前具身智能的核心短板:它能“感知”和“学习”,但尚未形成“认知”——无法像人类那样进行逻辑推理、抽象思考和创造性解决问题。
🌟 五、咖啡杯里的产业未来:具身智能的万亿赛道
在“十五五”规划列出的未来产业中,具身智能已与量子计算、脑机接口并列,成为国家重点布局的赛道。一杯完美的咖啡,不过是具身智能“小试牛刀”的起点,其真正的潜力,在于重构千行百业的生产与服务模式。
(一)未来应用场景展望
- 消费服务:除了咖啡机器人,还将出现智能调酒师、烘焙机器人、家政机器人,提供个性化、标准化的服务;
- 工业制造:柔性生产机器人能适配多品种、小批量生产,比如同一台机器人既能装配手机,又能组装汽车零件;
- 医疗健康:微创手术机器人、老年护理机器人、康复训练机器人,将缓解医疗资源紧张,提升服务精准度;
- 航天探索:星球探测机器人能自主适应未知环境,完成样本采集、设备维修等任务,减少对地面指令的依赖。
(二)技术突破方向
要实现这些场景,具身智能需突破三大技术瓶颈:
- 认知能力:从“感知数据”升级为“理解逻辑”,具备抽象思维和推理能力;
- 自主决策:面对复杂场景,能自主制定解决方案,而非依赖预设程序;
- 人机协作:更自然地与人类配合(如工厂里机器人与工人协同作业,根据人类动作调整自身行为)。

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 28
28 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)