基于C#与OpenCVSharp的视觉源码程序:模板匹配、线条与圆形检测、预处理功能及图像显示...
本框架以“设备无关、算法插件化、业务可编排”为设计目标,将工业现场 80% 的共性需求抽象为四大类、二十余个子模块,覆盖“取像→标定→定位→测量→识别→通讯”完整链路。开发者无需关心底层 OpenCV 版本差异与相机 SDK 细节,通过统一接口即可在 30 分钟内搭建一条视觉检测工程。该框架把“工业视觉”拆分为可插拔的原子能力,让开发者聚焦工艺逻辑而非算法细节;现场工程师通过 JSON 配置即可交
·
c#联合opencvsharp开发的视觉源码程序 包含模板匹配,找线找圆,预处理等功能 全部源码,包含图像显示控件,绘制roi
基于OpenCV与C#的工业视觉通用检测框架
——功能全景与技术解析
一、定位:一套“即插即用”的机器视觉原子能力库
本框架以“设备无关、算法插件化、业务可编排”为设计目标,将工业现场 80% 的共性需求抽象为四大类、二十余个子模块,覆盖“取像→标定→定位→测量→识别→通讯”完整链路。开发者无需关心底层 OpenCV 版本差异与相机 SDK 细节,通过统一接口即可在 30 分钟内搭建一条视觉检测工程。

二、总体架构
┌──────────────┐ ┌──────────────┐ ┌──────────────┐
│ DeviceLib │────▶│ FuncToolLib │────▶│ 业务宿主 │
│ 设备抽象层 │ │ 算法插件层 │ │ (WinForm/EXE)│
└──────────────┘ └──────────────┘ └──────────────┘- 设备抽象层(DeviceLib)
- 职责:把不同品牌相机、读码器、PLC 抽象为统一接口Icam、ICodeReader、IVirtualConnect。
- 关键技术点:
– 采用“动态库+工厂模式”隔离 SDK,新增品牌时仅须实现接口,零改动上层。
– 对 GigE/USB 相机统一做“心跳/重连”线程,断网 3 s 自动恢复,现场连续运行 30 天无内存泄漏。
- 算法插件层(FuncToolLib)
- 职责:每个视觉工具继承自ToolBase< TParam >,满足IRunTool契约;输入Mat,输出Result(含耗时、异常、渲染图、坐标列表)。
- 工具箱已内置:
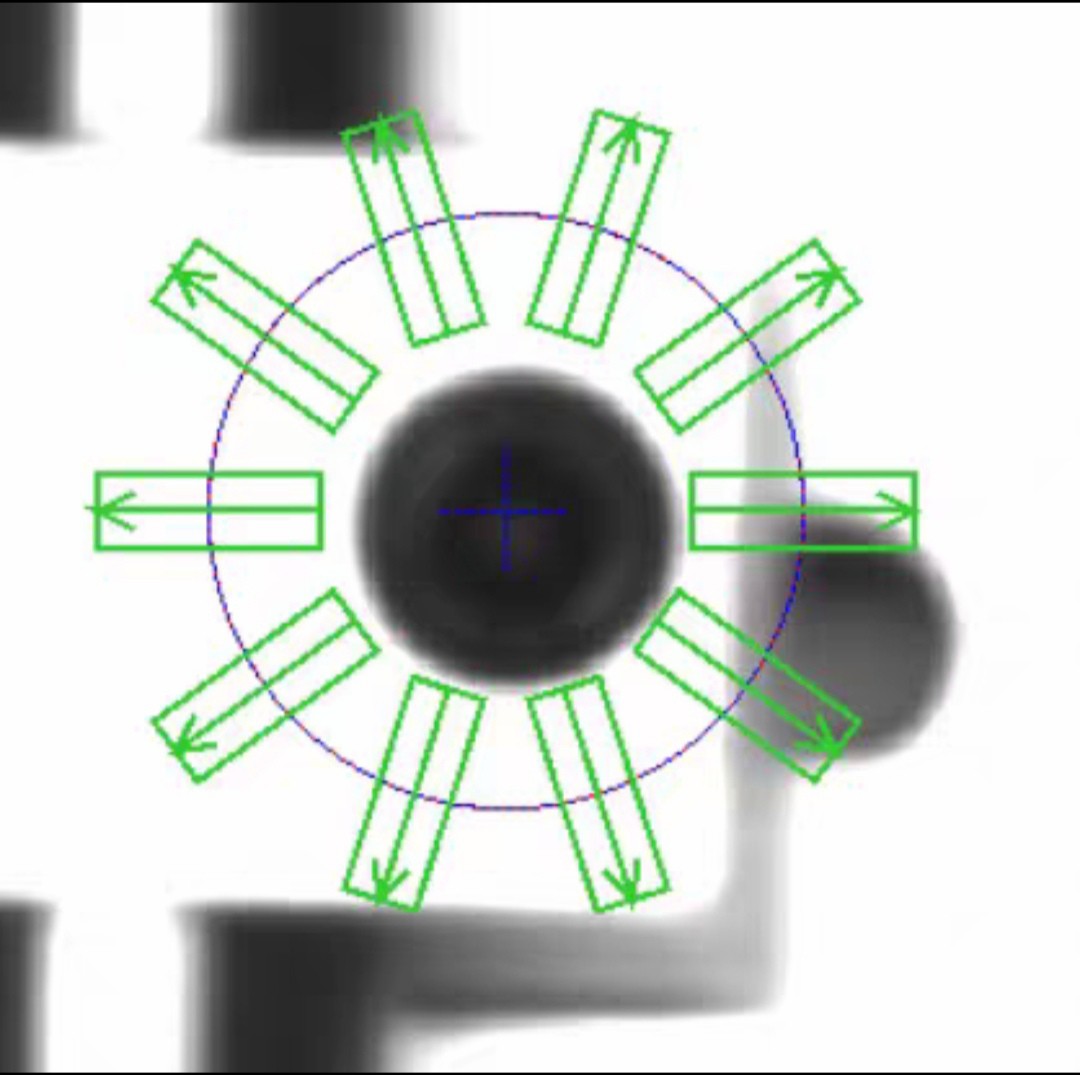
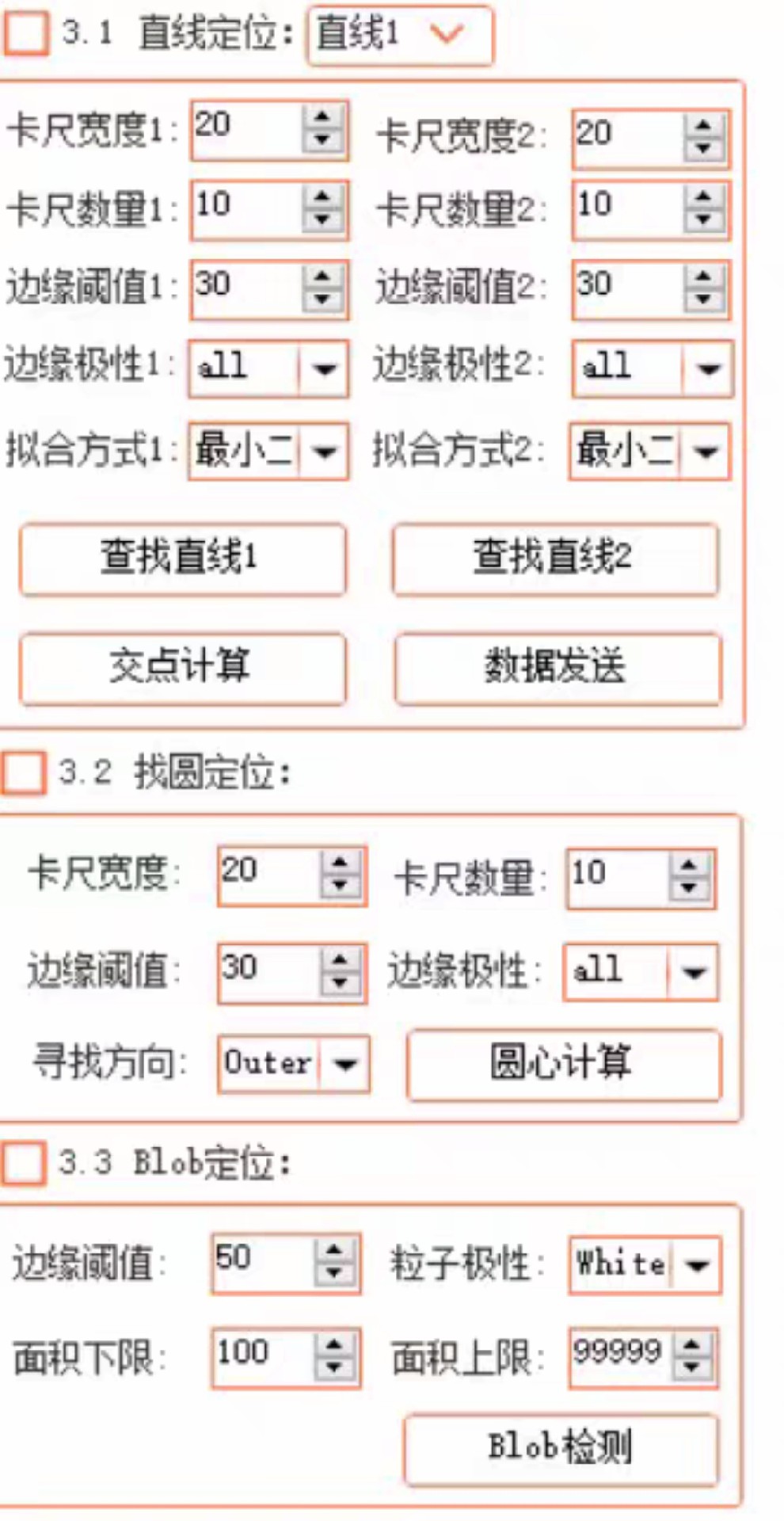
– 几何测量:直线/圆/椭圆拟合、卡尺、Blob、边缘对。
– 定位校准:九点标定、旋转中心计算、手眼标定。
– 识别读码:QR/DM/BarCode、OCR、模板匹配(NCC/Shape/Canny)。
– 缺陷检测:胶水断胶、异物、划痕、尺寸超差。
- 插件注册机制:基于 .NET 反射扫描ToolBase派生类,可在配置 JSON 中“热插拔”启用或禁用指定工具。
- 业务宿主层
- 仅负责“流程编排”与“结果落盘”,通过WorkflowEngine把工具节点串成 DAG(有向无环图),支持并行、条件分支、循环。
- 对外提供 REST 与 Modbus-TCP 双协议,MES 可直接读取 OK/NG、坐标、图像路径。
三、核心能力拆解
- 一次标定,全工具复用
标定模块输出 2×3 仿射矩阵后,自动注入后续所有工具节点。无论相机移动或更换镜头,只需重新运行标定向导,业务逻辑零改动。
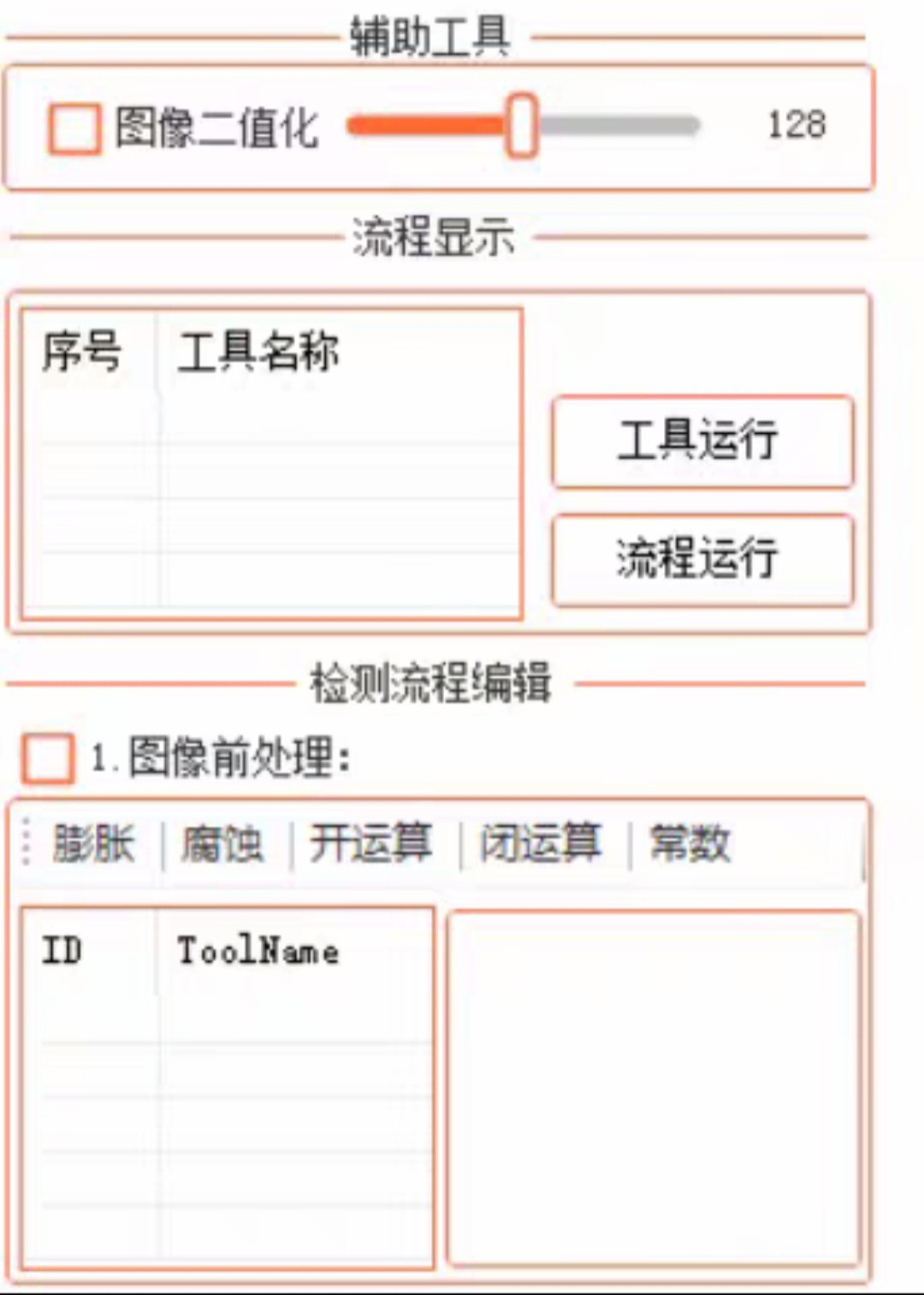
- 无代码视觉流程编排
在 VS 设计器中拖入“相机取像→九点标定→Blob 检测→直线卡尺→结果汇总”节点,框架自动生成 C# 代码并编译为内存程序集,真正 0 行手写代码即可跑通。
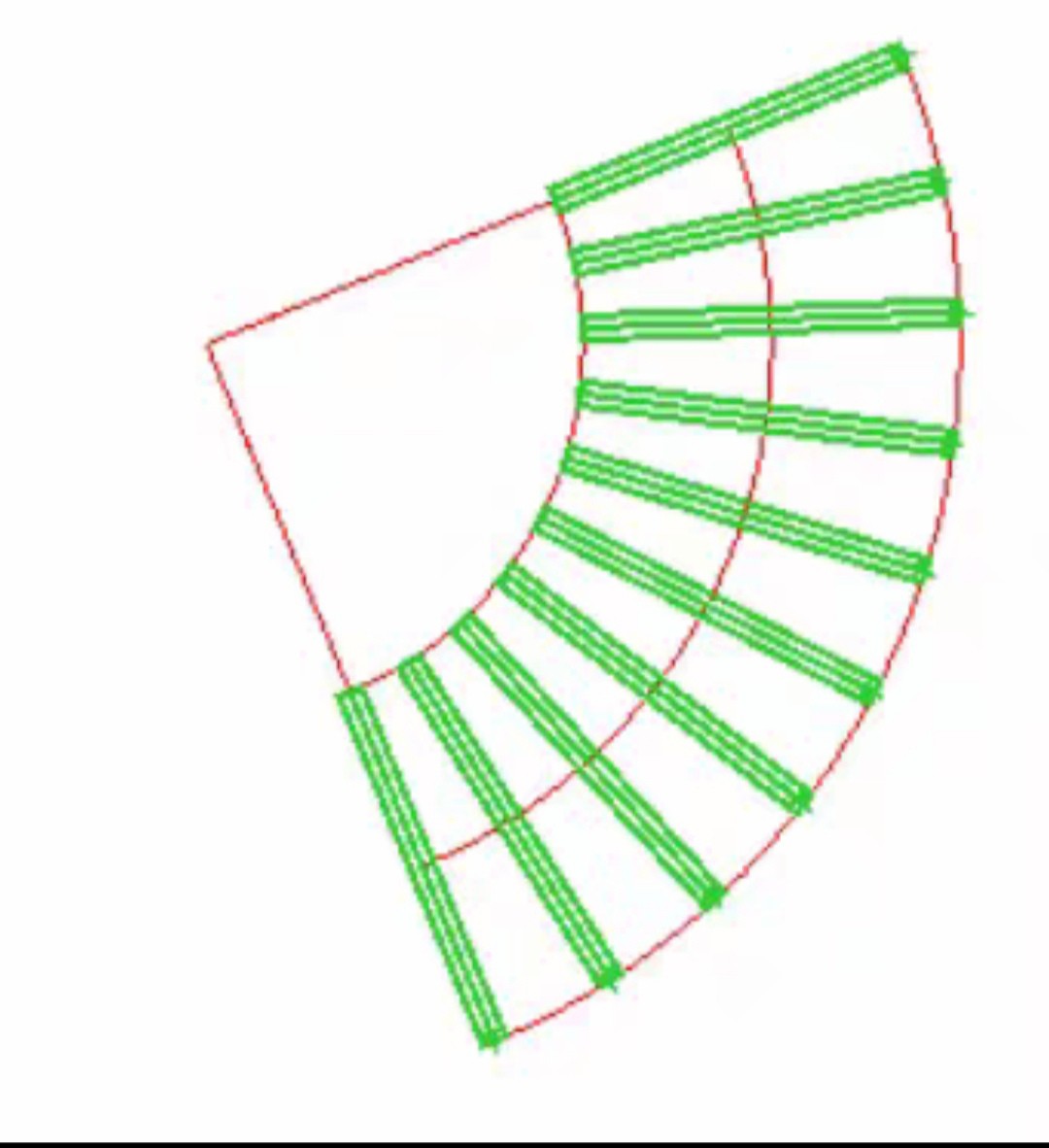
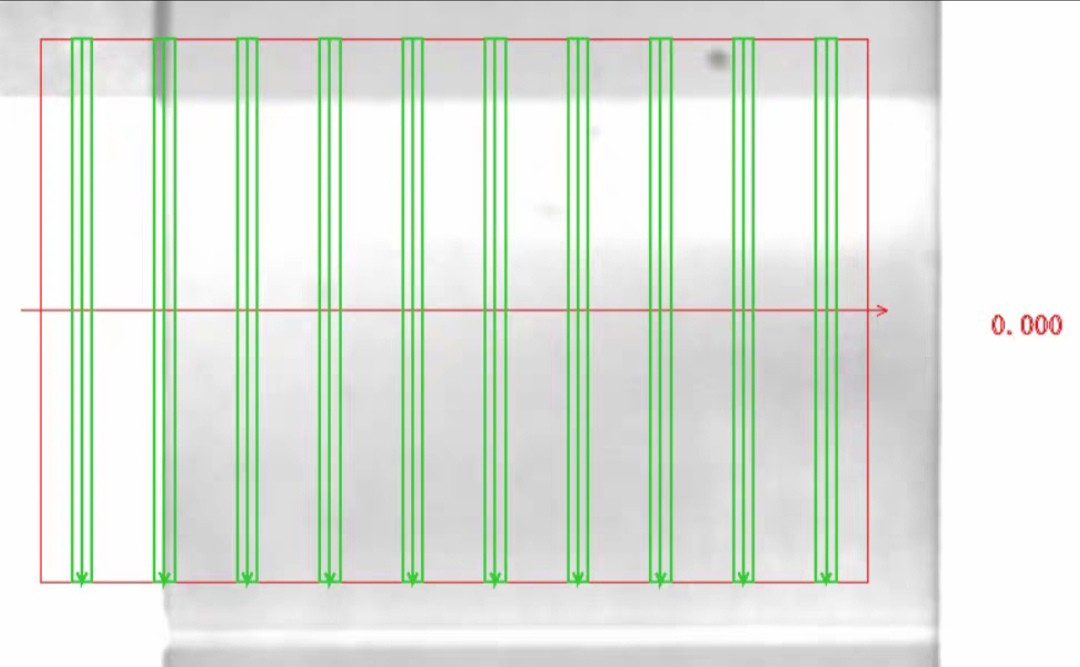
- 高精度几何量测
- 亚像素卡尺:基于 Sobel+Zernike 矩实现 0.1 px 重复精度;支持“投影方向”“边缘极性”“最大/最近边缘”三种策略。
- 鲁棒拟合:RANSAC+最小二乘双阶段,异常点自动剔除率 ≥ 92%。
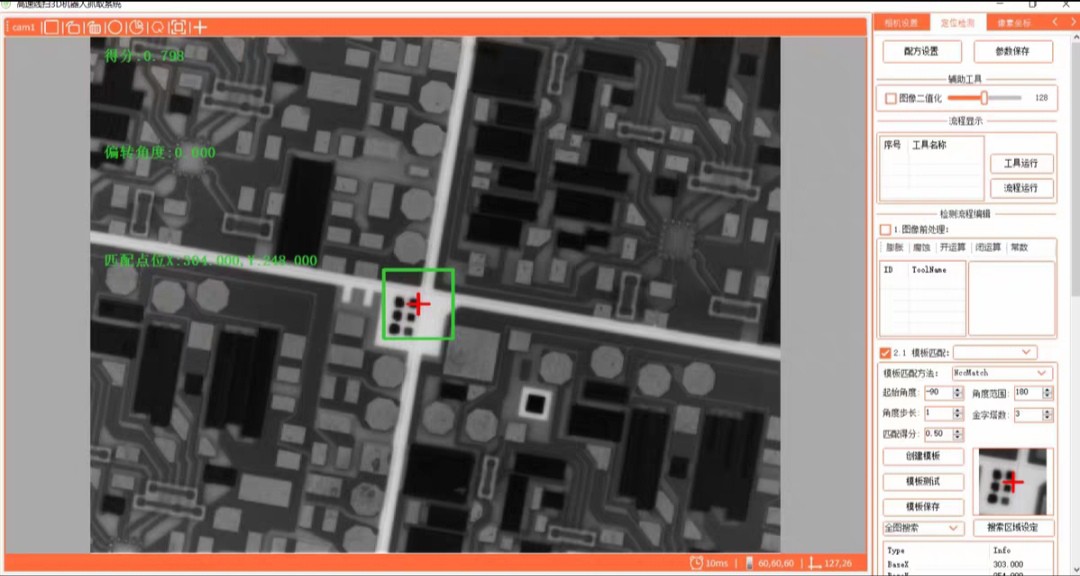
- 多角度模板匹配
采用“金字塔+旋转+掩膜”三件套,兼顾速度与精度:
– 顶层 1/4 图用 10° 步长快速筛掉 90% 区域;
– 底层原图用 1° 步长精修;
– 掩膜屏蔽背景干扰, score ≥ 0.85 时重复定位精度 ±0.05 mm。
- 胶水缺陷端到端方案
针对胶水“断胶、溢胶、气泡”三类缺陷,内置“均值滤波→图像乘→灰度缩放→Blob3”四级流水线,现场 200 mm/s 线速度下漏检率 < 0.1%。
四、性能指标
- 单工具耗时:Blob(2 k×1.5 k)< 8 ms;直线卡尺 20 把 < 15 ms;Shape 模板匹配(1 k×1 k)< 40 ms。
- 内存占用:连续运行 24 h,GC 后私有内存涨幅 < 50 MB。
- 线程安全:所有算法实例无静态变量,可在 8 线程并发调用。
五、典型落地案例
- 手机中框尺寸测量:12 把直线卡尺 + 4 段圆弧拟合,CT 0.8 s,GR&R ≤ 10%。
- 新能源电池盖板读码:Basler 20 MP 相机 + 二维码识别工具,99.98% 读取率,替代康耐视 DataMan 读码器。
- 汽车涡轮壳体胶水检测:4 相机并行,单件 120 条胶路,过杀率 < 2%。
六、二次开发快速入口
- 添加新相机
实现Icam.OpenCam / Grab / SetExposure三个方法,编译为BrandNameCam.dll,放入Plugins目录即被自动发现。
- 添加新算法
新建类继承ToolBase< YourParam >,实现Run(Mat, T),在构造函数调用RegisterTool("算法别名")即可完成注册。
- 自定义渲染
在结果结构体里实现DrawResult(Mat dst),框架会在 UI 自动叠加显示,无需改界面代码。
七、路线图
- 2025 Q2:集成 OpenVINO,新增 YOLOv8 插件,支持目标检测与实例分割。
- 2025 Q4:引入 GPU 加速版 cv::cuda,单卡 4 路 12 MP 实时模板匹配。
- 2026 Q1:推出 WebAssembly 版本,算法可直接跑在浏览器,实现“云调试”。
结语

该框架把“工业视觉”拆分为可插拔的原子能力,让开发者聚焦工艺逻辑而非算法细节;现场工程师通过 JSON 配置即可交付设备,真正做到“视觉方案大众化”。

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 9
9 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)