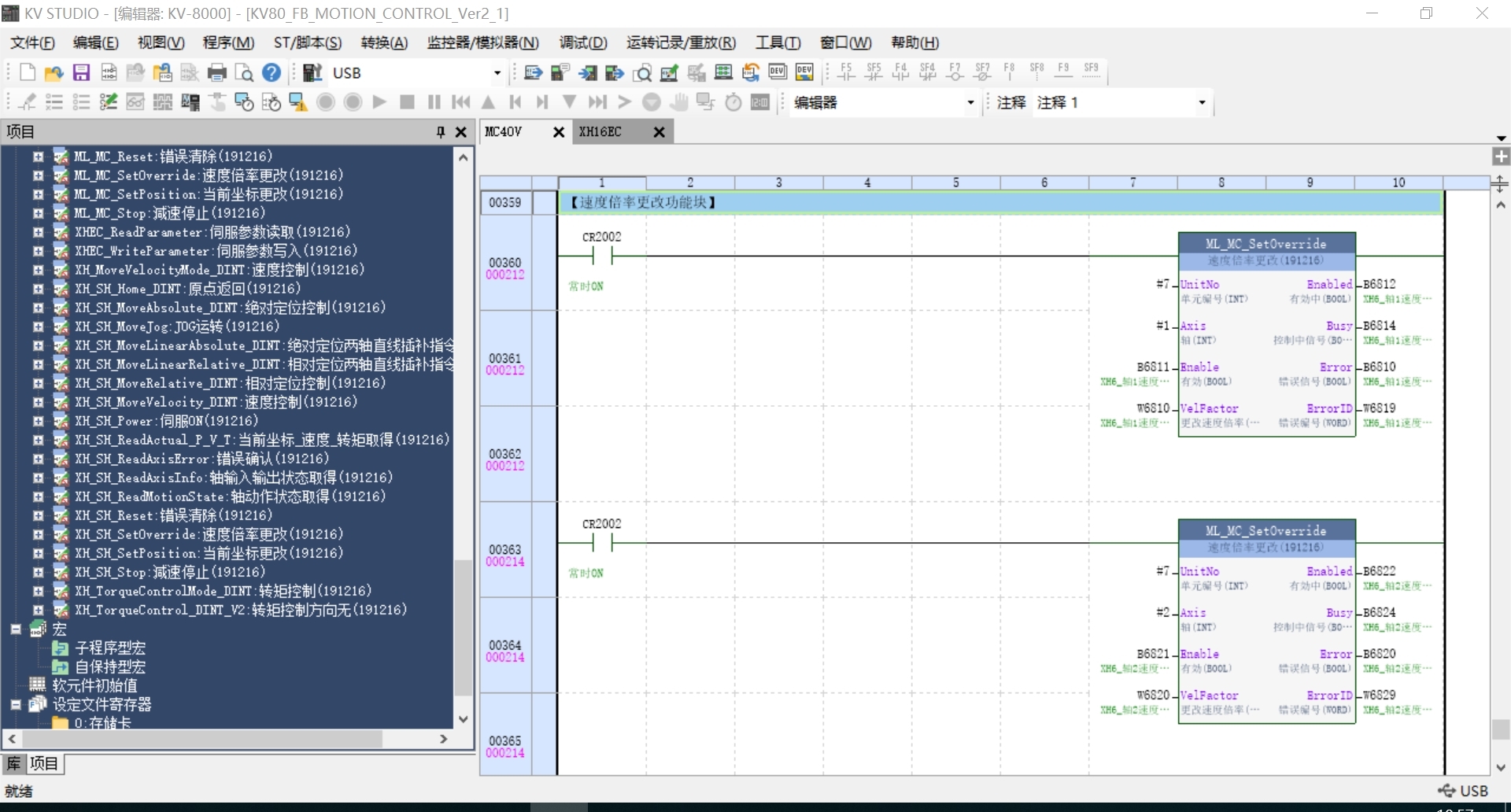
基恩士KV7500,KV8000轴控制FB模板,直接可以拿来用,使基恩士编程也随心所欲
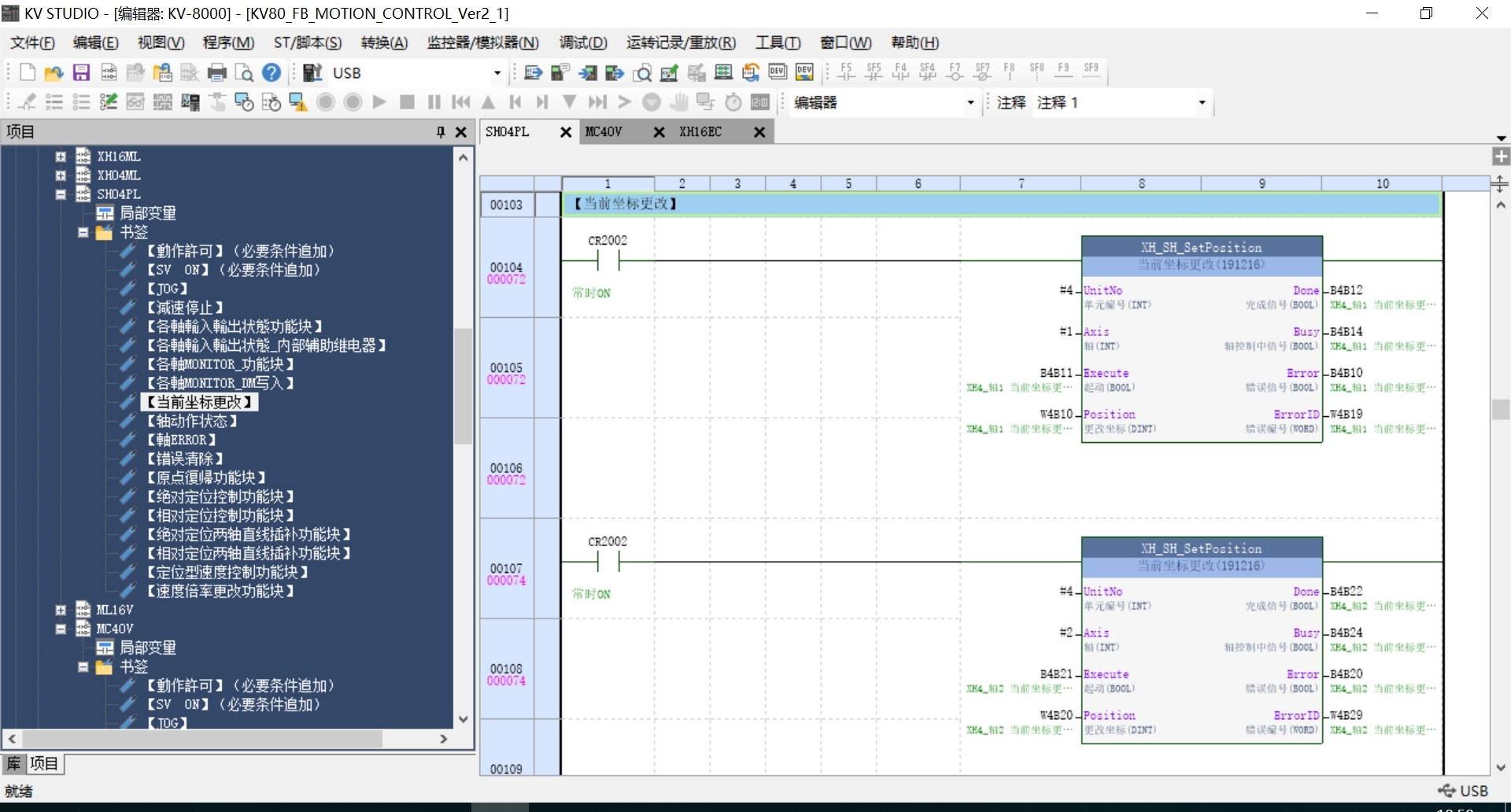
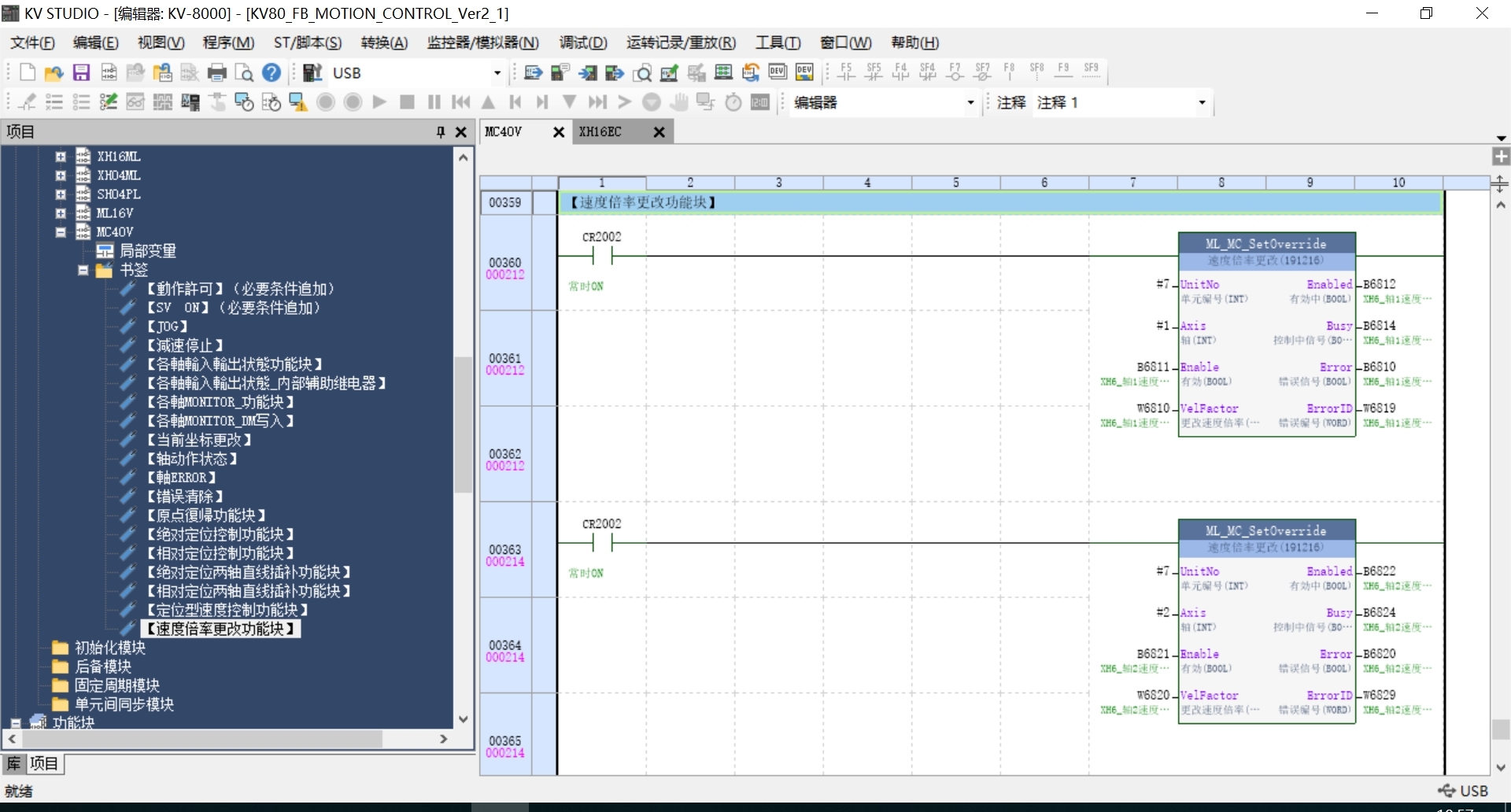
每个FB都配了信号时序图,比如原点复归的流程:近点信号触发→降速搜索→Z相信号捕获→坐标复位,连信号滤波时间都建议了5ms~20ms范围。不过最近发现一套KV7500/KV8000专用的轴控FB模板,直接把主流定位模块的坑都填平了。文档里附的时序图把同步启动、误差处理的时间节点标得明明白白,比看基恩士晦涩的英文手册省心十倍。包含了适配5种定位控制单元的FB,像常用的KV-XH16ML、KV-SH0
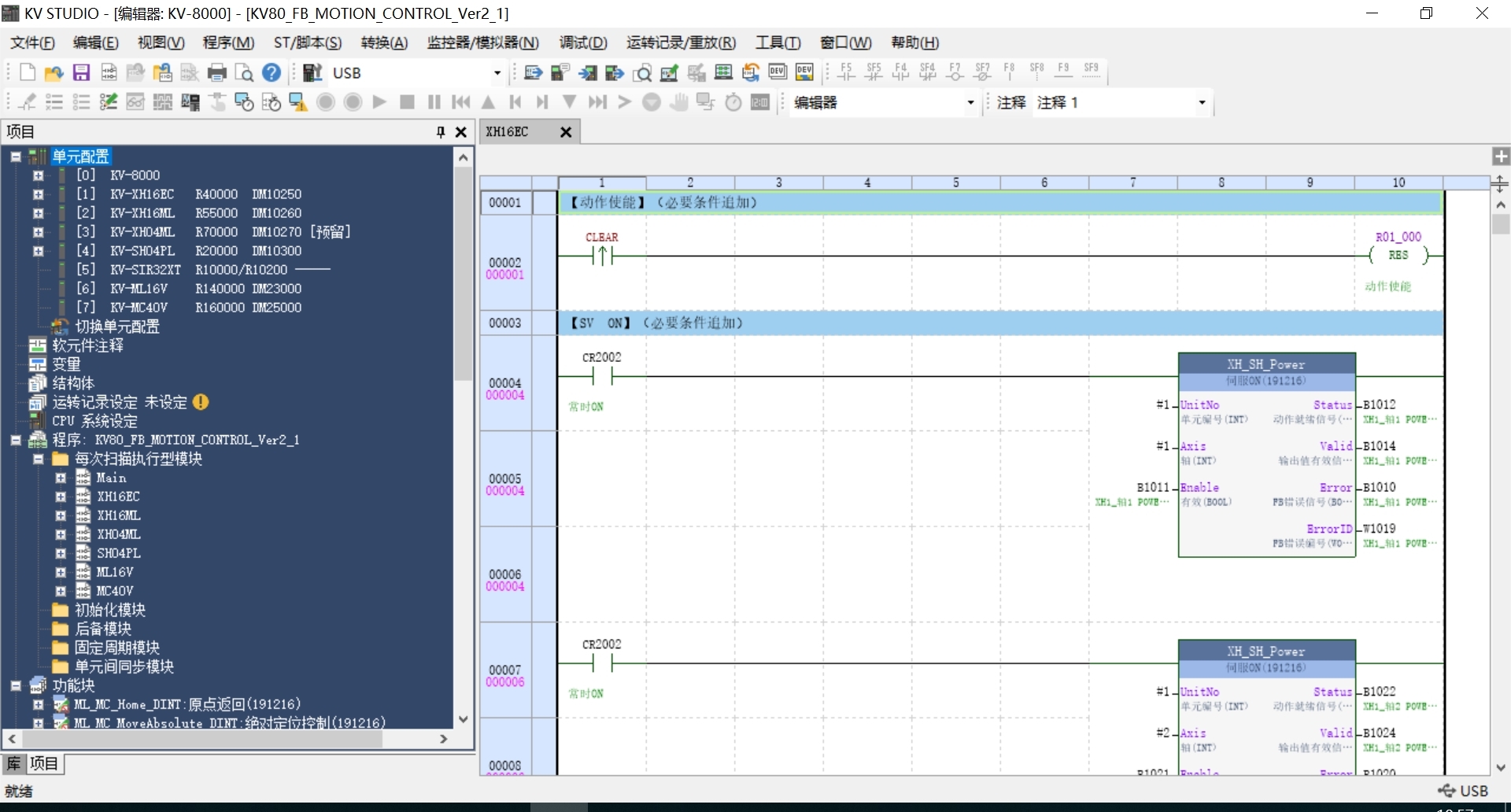
基恩士KV7500,KV8000轴控制FB模板,直接可以拿来用,使基恩士编程也随心所欲。 包含了适配5种定位控制单元的FB,像常用的KV-XH16ML、KV-SH04PL等都有适配的FB。 功能上包含了原点返回、绝对定位、相对定位、速度控制、力矩控制、两轴直线插补等。 可以说常用的基本都有了,非常方便使用。 重要的是附带详细的说明文档,每个FB的功能说明,时序图、引脚定义都说明的十分清楚。 PLC
基恩士PLC的轴控制功能有多难用?用过的都懂。每次搞定位模块都得重新造轮子,时序逻辑画到怀疑人生。不过最近发现一套KV7500/KV8000专用的轴控FB模板,直接把主流定位模块的坑都填平了。
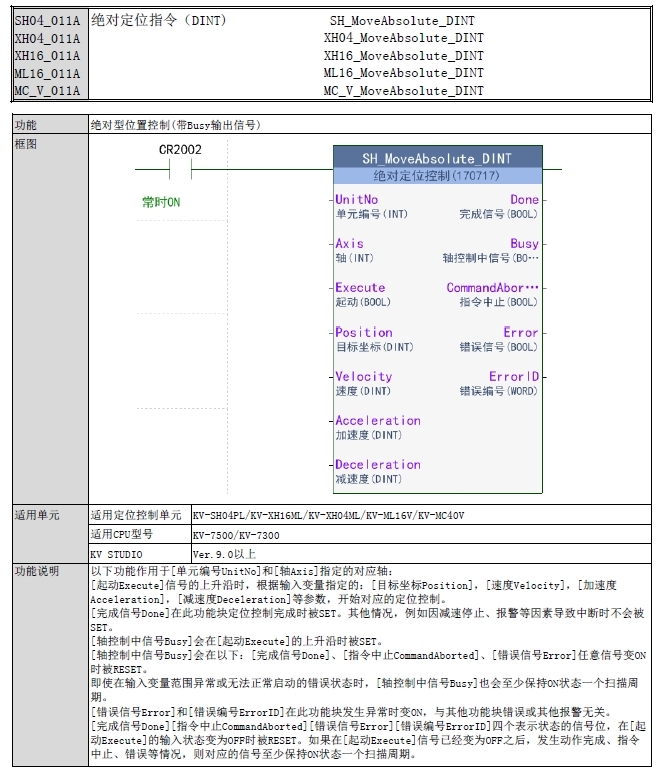
这套模板最狠的是适配了5种定位单元,像KV-XH16ML这种16轴模块直接甩个H_MultiAxisCtrl就搞定。举个栗子,要调用绝对定位功能:
H_AbsolutePositioning(
AxisNo:=1,
Position:=5000.0,
Speed:=3000,
Acceleration:=300,
Deceleration:=300,
Execute:=TRUE,
Done=>bPositioningDone,
Busy=>bAxisBusy,
Error=>iErrorCode);参数名起得够直白,连注释都不用加。Acceleration和Deceleration单位是mm/s²,比基恩士原厂库的%参数直观多了。注意Execute信号要自己处理上升沿,Done信号保持一个扫描周期这点跟大多数日系PLC习惯一致。
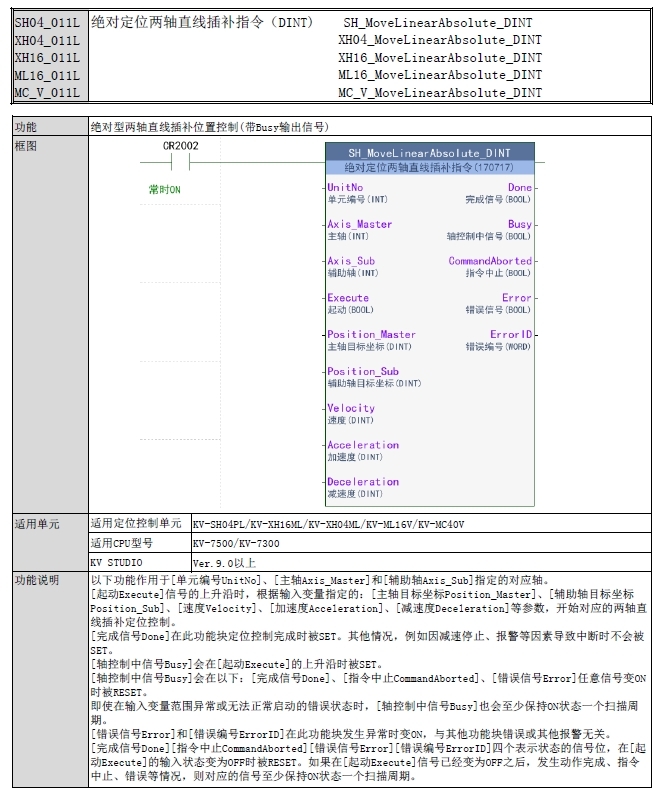
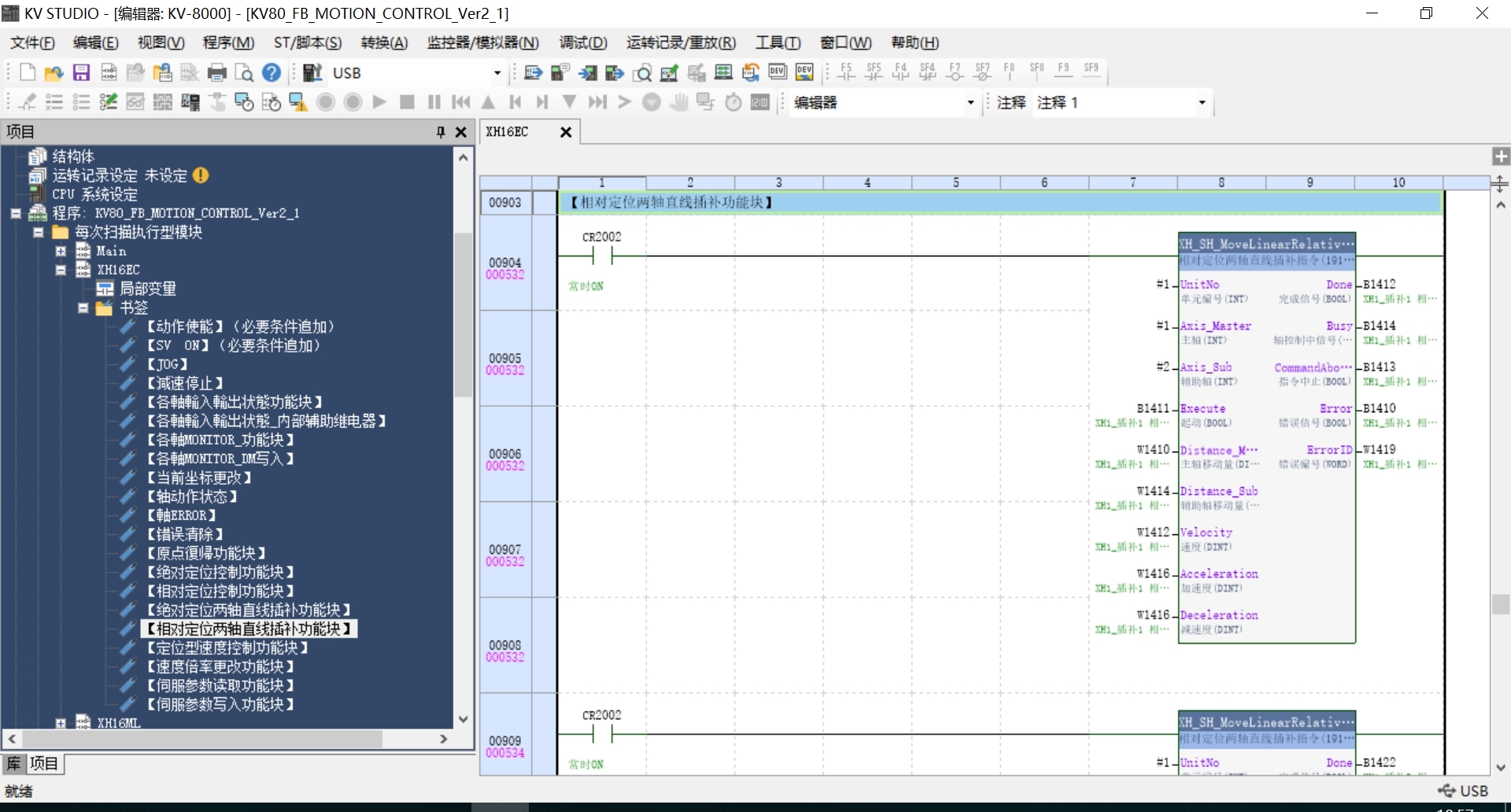
两轴插补才是真香现场。调用LinearInterpolation_2Axes时,连运动轨迹的斜率补偿都内置了:
LinearInterpolation_2Axes(
AxisX:=1,
AxisY:=2,
TargetX:=8000.0,
TargetY:=12000.0,
Speed:=5000,
AccDecTime:=200,
Execute:=TRUE,
PathComplete=>bInterpDone);底层自动处理了轴间的速度同步,实测过画圆轨迹误差在±0.02mm内。文档里附的时序图把同步启动、误差处理的时间节点标得明明白白,比看基恩士晦涩的英文手册省心十倍。
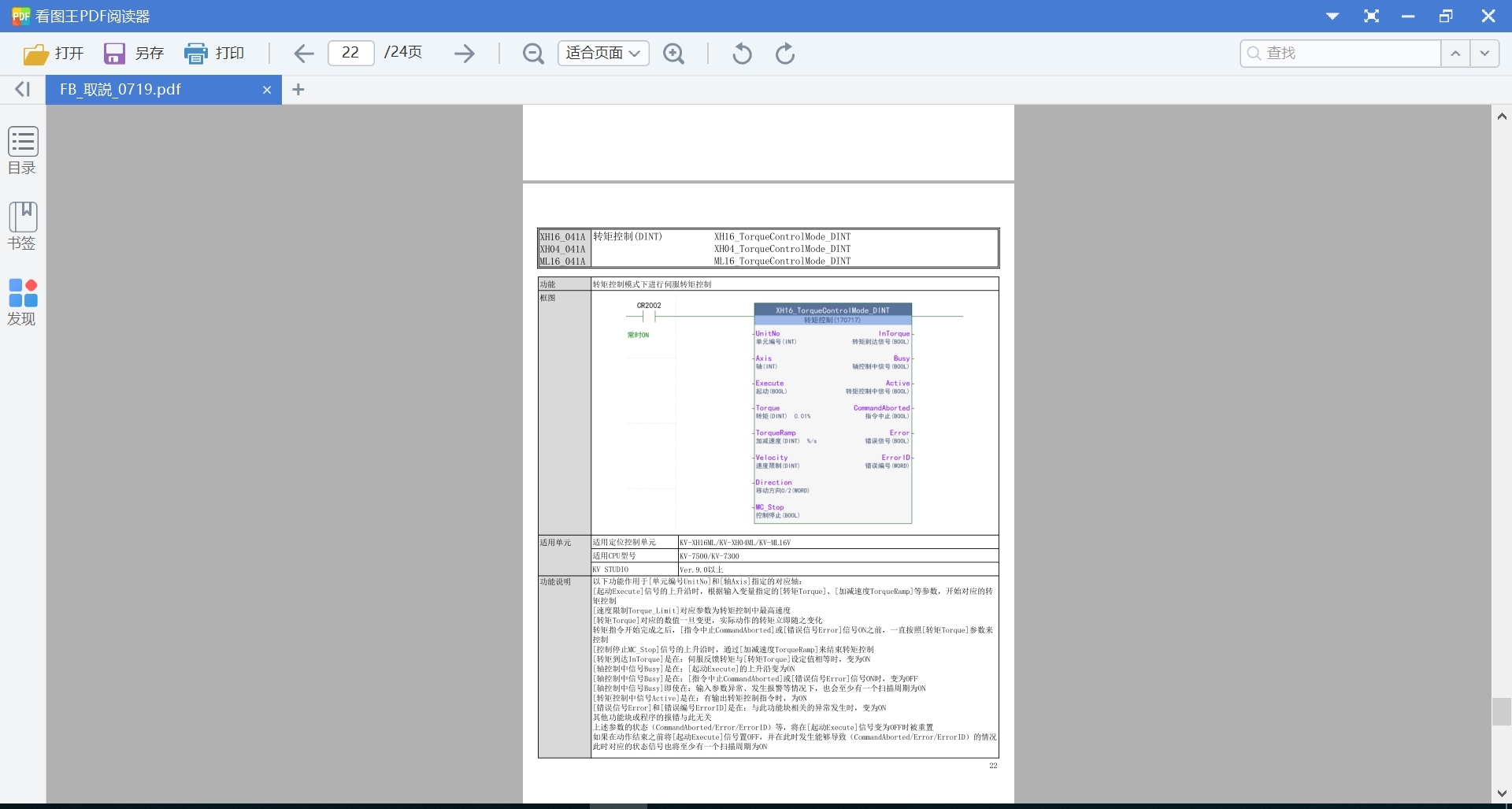
力矩控制功能居然连过载预测都做了。在TorqueControlFB里能看到这样的结构体:
TYPE H_TorqueProfile :
STRUCT
TargetTorque : REAL; // 单位N·m
RampUpTime : TIME; // 扭矩爬升时间
HoldTime : TIME; // 保持时间
ToleranceBand : REAL; // 扭矩容差带
END_STRUCT支持扭矩渐变控制,这对拧螺丝这类需要柔顺控制的场景太友好了。调试时遇到过扭矩震荡问题,后来发现是Deceleration参数没给够,文档的FAQ里还真有这条注意事项。
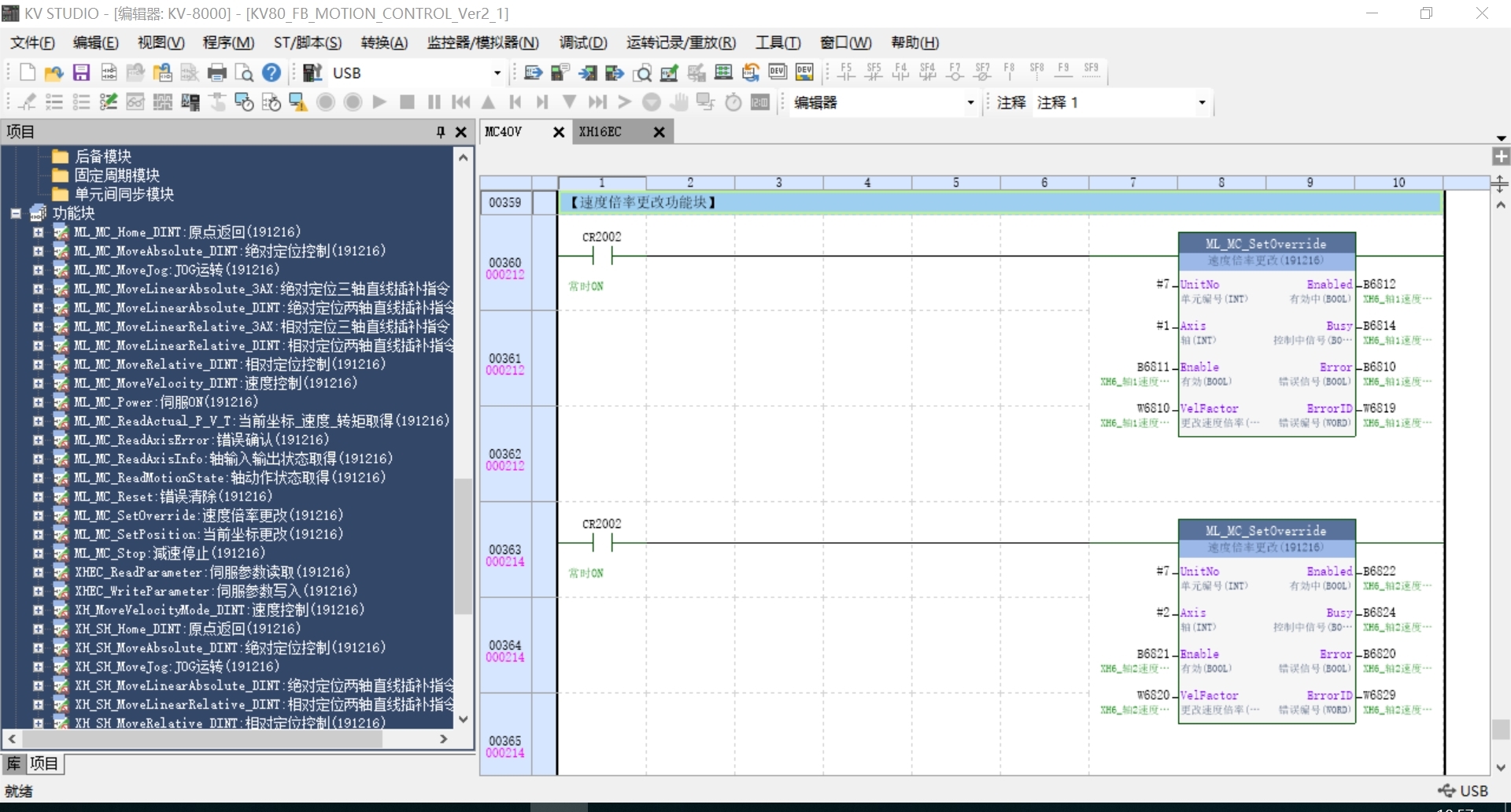
原厂说明文档绝对要给五星好评。每个FB都配了信号时序图,比如原点复归的流程:近点信号触发→降速搜索→Z相信号捕获→坐标复位,连信号滤波时间都建议了5ms~20ms范围。引脚定义表可以直接当接线图用,DI信号分配逻辑一目了然。
这套模板真正实现了基恩士PLC的"傻瓜式"轴控制。之前用SFC写定位控制要两天调试的功能,现在半小时就能跑通。唯一要注意的是FB之间记得用互锁信号,毕竟基恩士的扫描周期机制有点特别。老规矩,代码里多插几个H_CheckAxisState总没错,实时监控轴状态比事后查故障代码效率高得多。

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 5
5 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)