YOLOv8实时车速检测 车辆检测跟踪识别系统 PySide6界面 OpenCV 深度学习
本项目基于PySide6、OpenCV和YOLOv8实现实时车辆检测跟踪与车速检测系统。系统通过test.py启动,支持自定义检测视频源(修改22行路径)和检测区域(调整31行多边形顶点坐标)。检测区域采用多边形定义,用户可灵活设置形状和大小。运行环境要求Python3.8,完整源码可通过作者专栏获取。项目提供可视化操作界面,包含车速检测和车辆跟踪功能,适用于智能交通监控场景。
1、项目介绍
技术栈:
PySide6、OpenCV和YOLOv8实时车速检测+车辆检测跟踪
2、项目界面
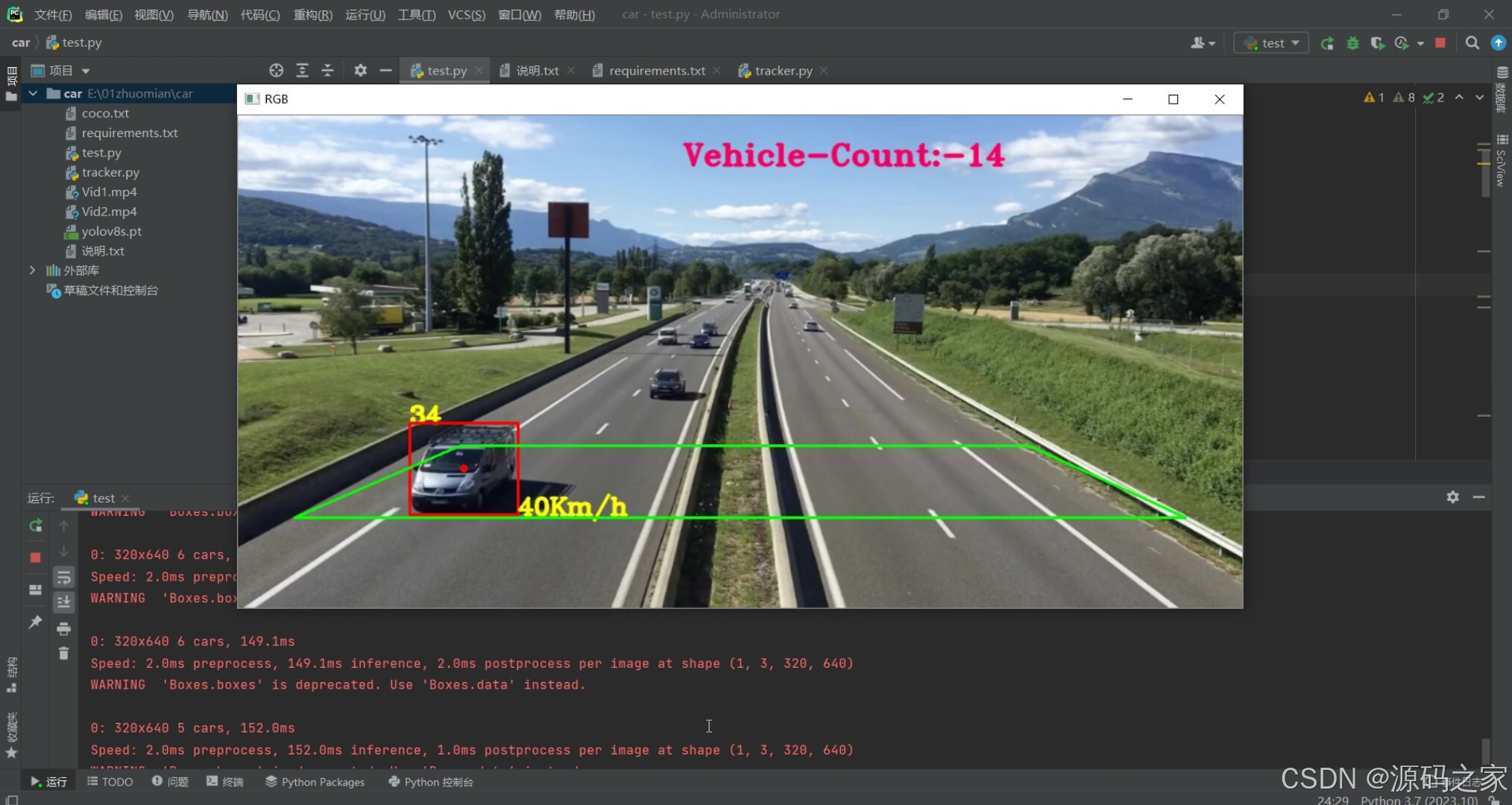
(1)车速检测车辆检测跟踪1
(2)车速检测车辆检测跟踪2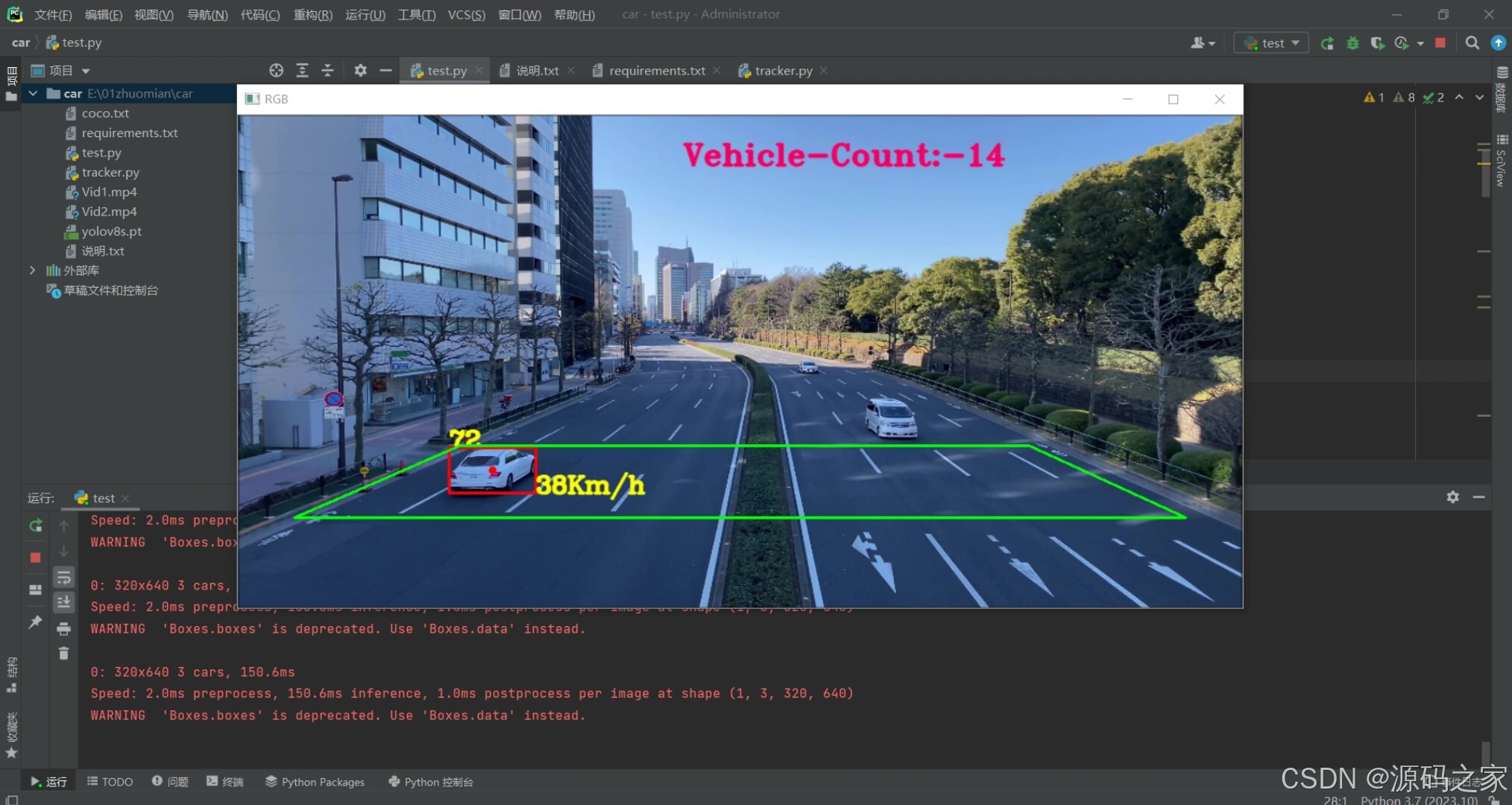
(3)车速检测车辆检测跟踪3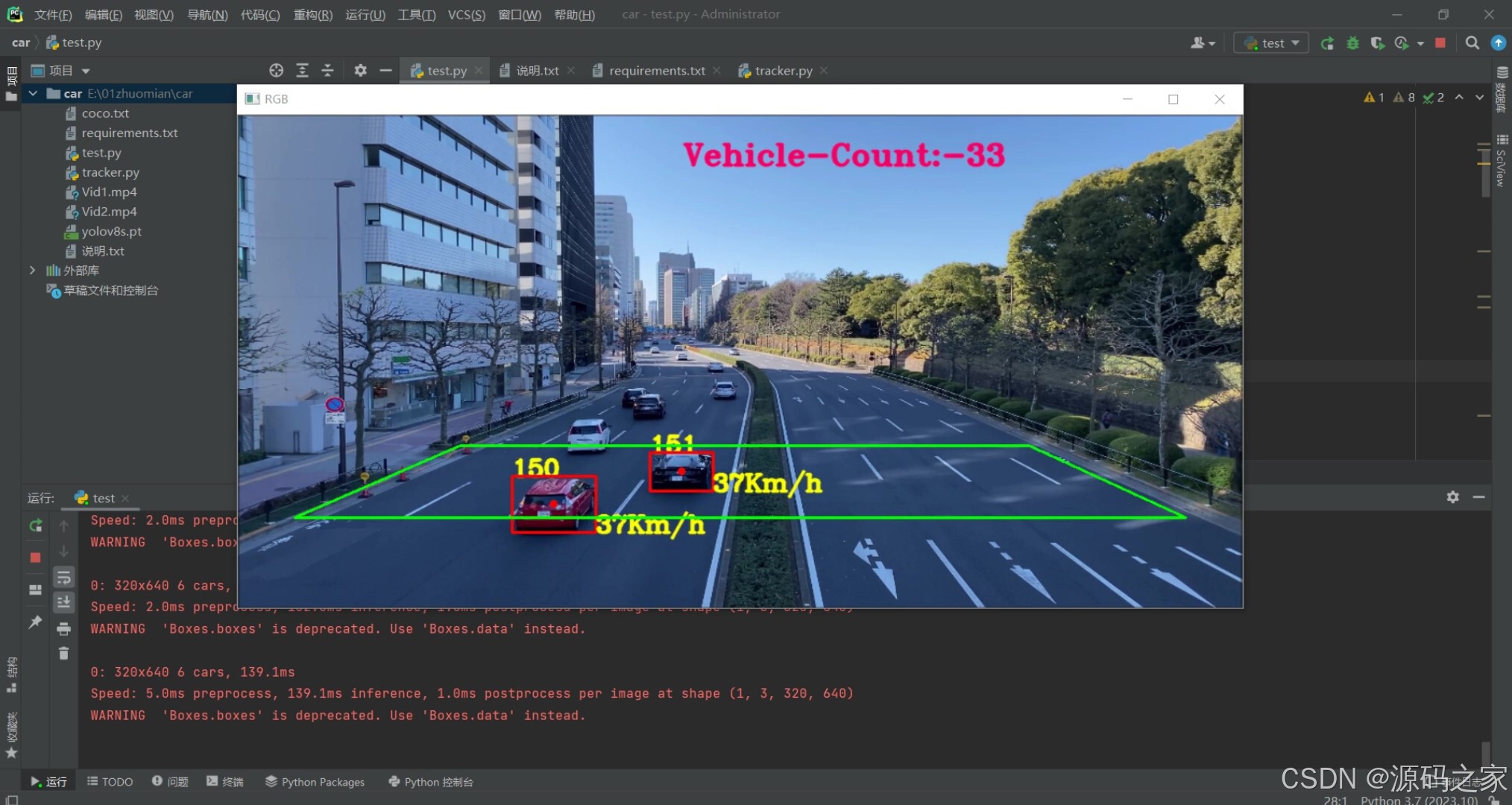
3、项目说明
3、项目说明
1、运行test.py启动项目
2、环境: Python 3.8
3、可以替换成自己的视频来检测
test.py第22行
cap = cv2.VideoCapture(‘Vid1.mp4’) # 选择需要检测的视频
4、检测区域设置: test.py 第31行
area = [(225, 335), (803, 335), (962, 408), (57, 408)]
在代码中,检测区域通过定义一个多边形来表示,然后使用cv2.polylines()函数将其绘制在图像上。你可以修改area变量来定义你想要的检测区域。area是一个包含多边形各个顶点坐标的列表,你可以根据需要添加或修改这些坐标点来定义你想要的检测区域的形状和大小。
例如,如果你想要一个矩形检测区域,可以按照矩形的四个顶点顺序添加坐标点。如果你想要一个不规则形状的检测区域,可以添加更多的坐标点以定义多边形的形状。
以下是一个示例,展示了如何将一个矩形区域定义为检测区域:
定义矩形检测区域的四个顶点坐标
area = [(x1, y1), (x2, y1), (x2, y2), (x1, y2)]
你需要将这些顶点坐标替换为你想要的实际坐标,并确保它们按照顺时针或逆时针顺序排列。然后,检测区域将根据这些顶点绘制在视频帧上,并在检测到的车辆进入该区域时进行相应处理。
4、核心代码
5、源码获取方式
🍅由于篇幅限制,获取完整文章或源码、代做项目的,查看我的【用户名】、【专栏名称】、【顶部选题链接】就可以找到我啦🍅
感兴趣的可以先收藏起来,点赞、关注不迷路,下方查看👇🏻获取联系方式👇🏻

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 4
4 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)