硬件开发_基于STM32单片机的护眼语音台灯系统
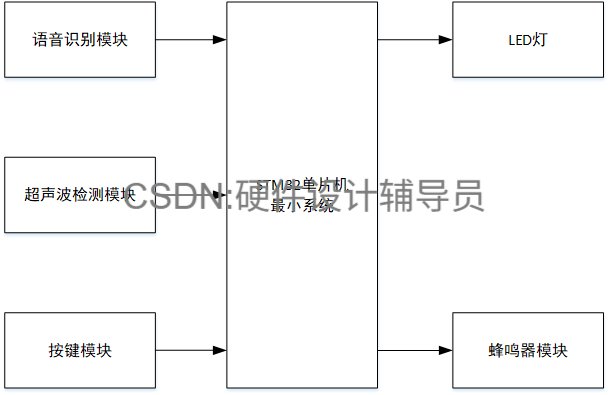
系统采用语音控制模块(LU-ASR01)实现灯光开关,通过HC-SR04超声波传感器实时检测距离,当物体距离小于设定阈值时触发蜂鸣器报警。电路设计包含最小系统、超声波测距、语音识别和报警驱动模块。程序设计采用C语言实现,包含初始化、显示控制等功能。该系统实现了智能灯光控制和距离安全预警的结合,具有操作简便和智能化特点。 (字数:150字)
一.系统概述
-
语音控制模块使系统能够响应语音命令,实现灯光的开关操作,提供了便捷的远程操控体验。
-
系统内置超声波传感器,能够实时检测并反馈目标物体与传感器之间的距离信息。
-
用户可以设定一个距离阈值,当传感器测量的距离小于该值时,系统将启动报警功能,提醒用户注意接近的物体或相关状况。
通过上述功能设计,智能护眼台灯不仅支持语音灯光控制,还结合超声波测距与报警,提高了设备的智能化和安全性能。
二.电路设计
电路设计采用Altium Designer软件完成:
-
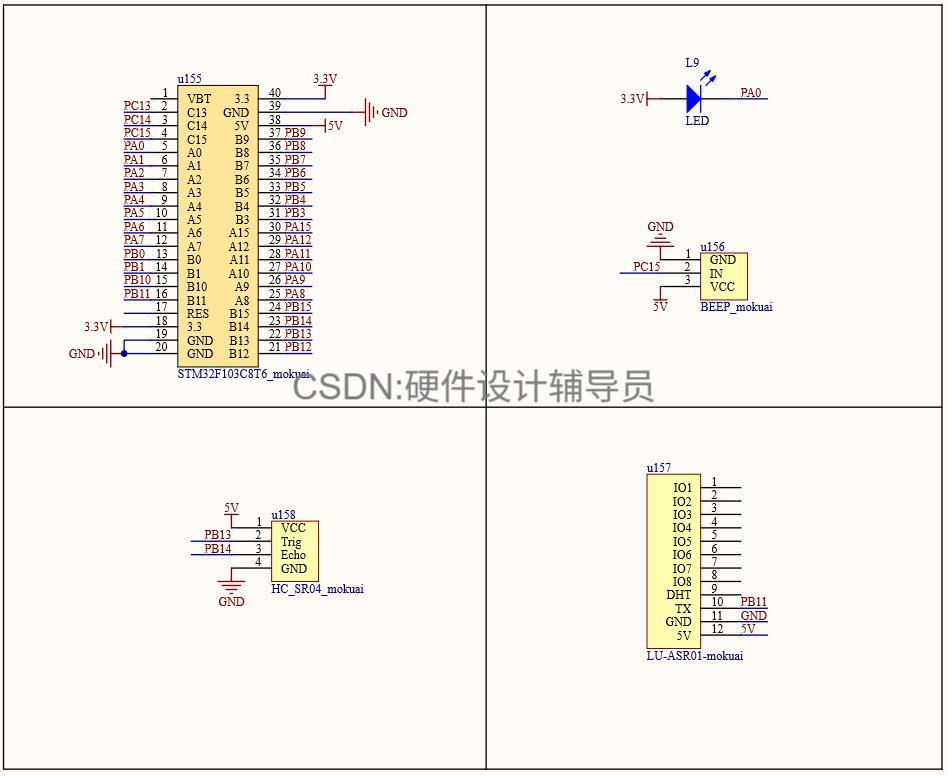
系统以STM32F103C8T6单片机为核心控制单元,最小系统电路构成了整个系统的基础框架。
-
人体距离检测部分采用HC-SR04超声波模块,通过超声波发射脚Trig和接收脚Echo连接到单片机的GPIO引脚,实现距离数据的采集。
-
语音指令识别采用LU-ASR01高精度语音识别模块,模块通过UART接口与主控单片机进行数据通信。
-
阈值设定由独立按键完成,按键一端接地,另一端连接单片机的GPIO口,用于用户输入调整参数。
-
报警功能通过有源蜂鸣器实现,蜂鸣器驱动电路采用NPN型三极管进行控制,确保蜂鸣器可靠工作。

三.程序设计
#include "sys.h"
#include "math.h"
#include "Control_Report_To_Police.h"
int main(void)
{
u32 ASR01_Uart_bound=9600;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置中断优先级分组为组2:2位抢占优先级,2位响应优先级
delay_init(); //延时函数初始化
Led0_init();
ASR01_Uart2_init(&ASR01_Uart_bound);
Hcsr04_Timer2_Init();
Beep_init();
Beep=0;
while(1)
{
OLED_Display_Cotrol(); //显示控制函数
}
}
四.资料内容
24-32-31

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 10
10 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)