基于神经网络(NN)模型预测控制(MPC)算法,用于控制具有随机通信拓扑的多智能体系统MAS
基于神经网络(NN)模型预测控制(MPC)算法,用于控制具有随机通信拓扑的多智能体系统MAS包括1 基于神经网络的MPC算法,用于在四旋翼机队系统2带扰动系统和非线性机器人汽车系统的MAS中达成共识
基于神经网络(NN)模型预测控制(MPC)算法,用于控制具有随机通信拓扑的多智能体系统MAS
包括
1 基于神经网络的MPC算法,用于在四旋翼机队系统
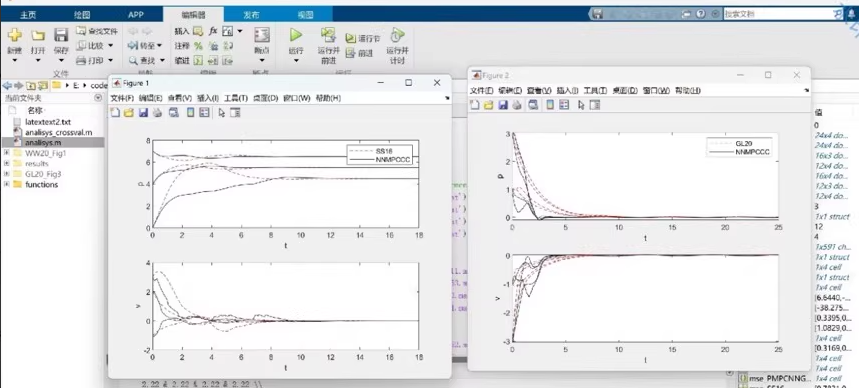
2带扰动系统和非线性机器人汽车系统的MAS中达成共识
以下文字及示例代码仅供参考
基于神经网络(NN)模型预测控制(MPC)用于控制具有随机通信拓扑的多智能体系统(MAS),是一个非常前沿的研究领域,涉及到控制理论、优化算法、机器学习等多个学科的知识。下面我将概述如何实现这一目标,并提供一个基本框架来指导你如何开始。
1. 系统建模
首先,你需要为每个智能体建立数学模型。这通常包括动力学模型和约束条件。对于复杂的非线性系统,这些模型可能难以精确描述,因此可以使用神经网络对系统进行逼近。
2. 神经网络设计
为了利用神经网络进行预测,需要训练一个或多个神经网络模型来逼近系统的动态行为。这里的关键是选择合适的网络结构(如全连接网络、卷积网络或递归神经网络等)、激活函数以及损失函数。
- 输入层:代表当前状态、控制输入和其他可能影响系统行为的因素。
- 隐藏层:通过多层非线性变换来捕捉系统的复杂动态特性。
- 输出层:预测下一个时间步的状态或控制输入。
3. 模型预测控制设计
在获得有效的系统近似模型后,接下来就是设计MPC控制器:
- 预测模型:使用上述训练好的神经网络作为预测模型。
- 成本函数:定义一个成本函数,它通常包括跟踪误差、控制努力和可能的终端成本。
- 约束处理:考虑物理限制、安全边界和其他操作约束。
- 优化问题求解:在一个滚动时域内解决优化问题,以确定最优控制动作。
4. 多智能体系统协调
对于MAS,除了单个智能体的控制外,还需要设计策略来保证整个群体的协同工作。这可以通过设计适当的通信协议和分布式优化算法来实现。当面对随机通信拓扑时,可以采用以下方法:
- 一致性算法:确保所有智能体达成一致的目标或状态估计。
- 鲁棒性设计:考虑到通信链路可能会断开或延迟,设计鲁棒控制策略以维持系统稳定性。
- 分布式优化:允许智能体之间交换信息并共同解决问题,但不依赖于中央处理器。
示例代码框架
以下是一个简化的MATLAB代码框架,展示了如何结合NN和MPC来控制MAS的一部分:
% 初始化
numAgents = 5; % 假设有5个智能体
network = createNeuralNetwork(); % 创建并训练你的神经网络模型
mpcConfig = setupMPC(network); % 配置MPC参数
for t = 1:simulationSteps
% 获取当前状态
currentState = getCurrentState();
% 使用NN进行预测
predictions = predictWithNN(network, currentState);
% 计算MPC控制律
controlLaw = computeControlLaw(mpcConfig, predictions);
% 应用控制律到各智能体
applyControlToAgents(controlLaw);
% 更新状态
updateSystemState();
end
请注意,实际应用中需要更详细的实现细节,包括但不限于数据预处理、模型训练、异常检测与处理等。此外,针对特定的应用场景,还需要调整网络架构、优化算法以及控制策略的具体参数。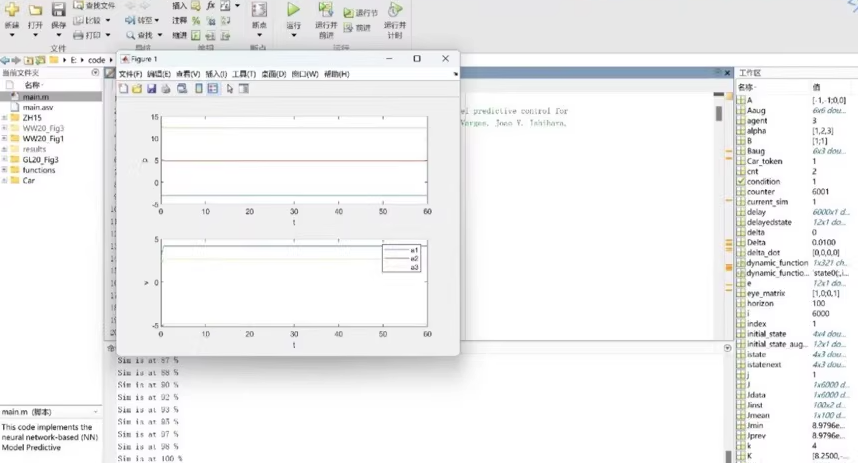

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 19
19 0
0- 0



 已为社区贡献21条内容
已为社区贡献21条内容

所有评论(0)