光学镜头闲谈——光圈、焦段、视场角、CRA等
上篇提到sensor与lens的匹配留了个“坑”,所以在这篇中聊下镜头(从tuning岗位角度,非专业光学人士)。主要从分辨率、光圈、视场角、CRA、摩尔条纹、畸变方面。
a.分辨率。
镜头分辨率是整个成像系统的基石,是对空间频率的传递能力,受到衍射极限和像差的硬件约束。这里想帮tuning工程师说一句,isp不能突破物理极限,只能通过锐化、像差补偿等方式,实现“主观上最优”的画质输出。镜头的分辨率大于等于sensor的分辨率,是获得清晰图像的前提。
Sensor有分辨率要求,Sensor的Pixel Size决定Sensor的分辨率极限。光学中,sensor的分辨率用空间频率表示:
fn=1/d/2
其中fn为乃奎斯特空间频率(可理解为sensor的极限空间频率),单位为lp/mm(线对/毫米),d=pixel的宽度。
b.光圈
光圈调节单位时间内进入传感器的光能量(光通量Φ),其与通光孔面积成正比。光圈值的计算公式N=f/D,f是镜头的焦距mm,D是通光孔径直径mm,所以光圈值是个数值,没有单位。
工程中,光圈相邻档位的进光量相差根号2的倍差(1.414倍):
F1.0 -> F1.2 -> F1.4 -> F1.8 -> F2.0 -> F2.4 -> F2.8 -> F3.5 -> F4.0 -> F5.6 -> F8.0 -> F11 -> F16
对于tuning工程师来说,如果有低照场景的需求且有一定的画质要求,通常争取“大光圈”。这里的大光圈是相对而言的,不同行业不同消费场景的镜头有很大差异。比如,对于面向to C端的摄像头,使用F1.6镜头能满足大部分使用场景;但是深山老林用的全彩黑光产品上在使用F1.6就有些“心有力而力不足”,需要F1.2以上光圈的镜头。
c.焦段、视场角
焦段是镜头光学中心到传感器像面的距离,决定了镜头的视场角和空间压缩感。视场角是镜头能捕捉的场景范围,与焦段成反比,计算公式(对角线的视场角):AOV=2*arctan(d/2f),f是镜头焦段mm,d是传感器对角线长度mm。
实际工程中,选用什么焦段的镜头,通常与产品定位、使用场景有关。
d.CRA
镜头CRA 是Chief Ray Angle的缩写,即主光线角,它是决定成像均匀性与色彩准确性的关键参数,且镜头和sensor均有该参数,二者的匹配度对成像质量起着决定性作用。
CRA匹配建议:sensor与lens的CRA角度差控制在3度以内,超过3°容易出现问题,注意这里并不是镜头cra值越小越好,而是需要和sensor搭配差值越接近越好。当 lens CRA 大于 Sensor CRA 会出现明显的 color shading,当 lens CAR 小于 Sensor CRA 会出现 luma shading,建议是选择 lens CRA 小于 sensor CRA 的配置,因为luma shading 相比于 color shading的情况,ISP 更容易处理一些。
e.摩尔条纹。
产生摩尔纹条的原理: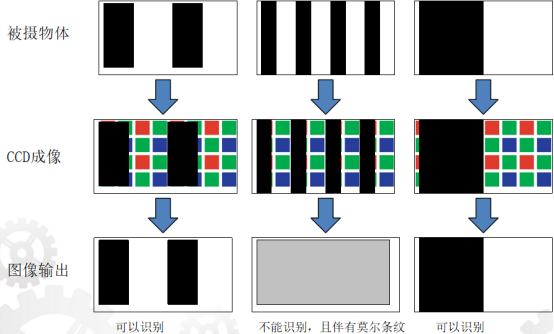
有摩尔纹和没有摩尔纹的图。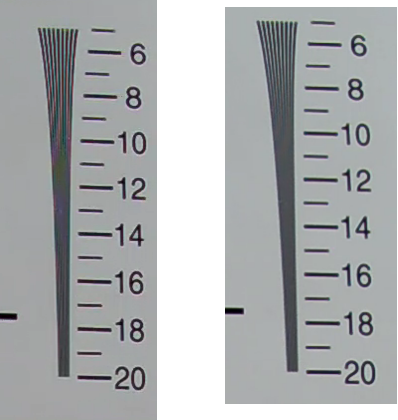
f.畸变
导致畸变的原因是镜头对不同视场角光线的放大倍率不一致,即镜头中心区域与边缘区域的放大率存在差异,导致物体形状偏离真实几何形态,常见的有桶形畸变、枕形畸变。
小计:实际工作中,tuning工程师参与不到镜头选型中,但当最终成像出现问题或是偏差时,需要从pipeline到raw,sensor驱动到硬件,lens与sensor的搭配排查问题。
下一篇预告~~~~《sensor选型与测评》

中国智能体开发者社区,聚焦智能体与大模型开发,提供前沿资讯、实用工具链、开源项目及行业案例。通过技术沙龙、开发者大赛等活动,促进经验交流与协作,助力开发者快速构建创新智能应用。
更多推荐


 6
6 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)