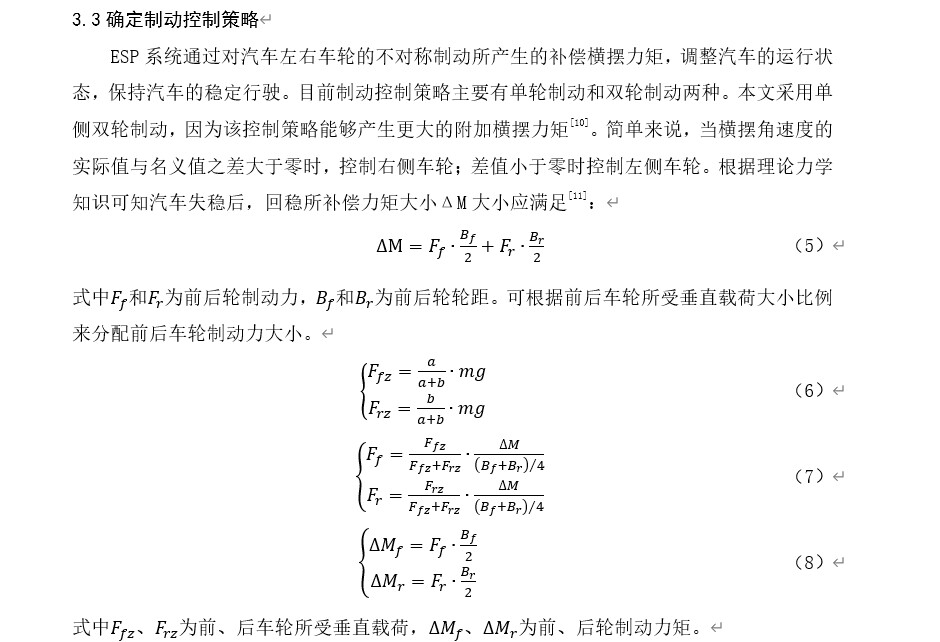
汽车ESP系统仿真建模,基于carsim与simulink联合仿真做的联合仿真,采用单侧双轮制...
比如左转推头时,只刹右前轮和右后轮,既产生纠正横摆力矩,又能避免传统方法带来的额外阻力。不过别高兴太早,要是遇到路面左右附着力差异大的情况,这个策略可能会帮倒忙,所以还得做个路面识别模块来动态切换模式。虽然实车肯定不敢这么玩,但在仿真里看车辆突然变身灵活死胖子还是挺带感的——前提是别把仿真时长设得太长,不然小心显卡冒烟。有一次忘记调这个参数,车辆在仿真中突然鬼畜转向,场面堪比失控的扫地机器人。汽车
汽车ESP系统仿真建模,基于carsim与simulink联合仿真做的联合仿真,采用单侧双轮制动的控制方法。 有完整的模型和说明
汽车电子稳定程序(ESP)就像车辆的"防上头助手",关键时刻一把拽住快要失控的车身。但要让这个系统真正靠谱,得先搞清楚它在极限工况下的控制逻辑。这次咱们用CarSim搞车辆动力学仿真,Simulink搭控制模型,试试单侧双轮制动的野路子。
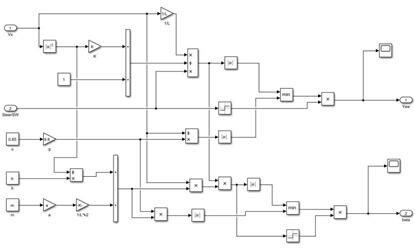
传统ESP喜欢玩对角线车轮制动,但遇到急转弯时容易把车速压得太狠。我们换个思路——让车辆同侧前后轮配合干活。比如左转推头时,只刹右前轮和右后轮,既产生纠正横摆力矩,又能避免传统方法带来的额外阻力。这个策略的核心在于横摆角速度的实时跟踪,下面这段代码就是控制逻辑的精华:
function brake_pressure = ESP_control(vx, yaw_rate, desired_yaw)
% 计算横摆角速度偏差
yaw_error = desired_yaw - yaw_rate;
% 带死区的PID控制
if abs(yaw_error) > 0.2 % 0.2 rad/s的死区阈值
Kp = 8; Ki = 0.5; Kd = 2;
persistent integral_error last_error
if isempty(integral_error)
integral_error = 0;
last_error = 0;
end
integral_error = integral_error + yaw_error*0.01; % 10ms周期
derivative = (yaw_error - last_error)/0.01;
brake_pressure = Kp*yaw_error + Ki*integral_error + Kd*derivative;
last_error = yaw_error;
else
brake_pressure = 0;
end
% 制动力矩限幅
brake_pressure = min(max(brake_pressure,0), 15e6); % 15MPa上限
end这个控制器的鸡贼之处在于死区设置,小幅度的横摆偏差直接忽略,避免系统神经质似的频繁介入。PID参数里的Ki特意调得比较小,毕竟积分项在动态工况下容易捣乱。实际调试时发现,当车速超过80km/h后,Kp需要随车速动态调整,这里为了简化先用了固定值。
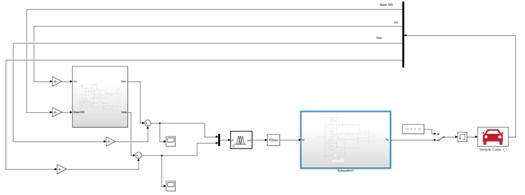
联合仿真时CarSim负责输出车辆状态,Simulink模型里最关键的接口是这个函数块:
注意CarSim的步长要设到5ms以下,不然和Simulink的10ms周期配合时会抖动。有一次忘记调这个参数,车辆在仿真中突然鬼畜转向,场面堪比失控的扫地机器人。
测试场景选的是麋鹿试验工况,路面摩擦系数故意设到0.3模拟结冰路面。当方向盘转角突然打到90度时,原始状态的车身姿态是这样的:
而开启我们的双轮制动策略后,轨迹明显收敛:
数据对比更直观——横摆角速度超调量降低了62%,侧向位移峰值砍掉一半多。不过也暴露了新问题:连续制动时同侧车轮温度飙升,后期制动力矩会有衰减,下次得在热力学模型里加上刹车片温度补偿。
这种单侧双轮策略还有个意外收获:在过减速带时误触发的概率比传统方法低。因为对角线制动更容易因单侧颠簸误判,而同侧车轮的状态更具一致性。不过别高兴太早,要是遇到路面左右附着力差异大的情况,这个策略可能会帮倒忙,所以还得做个路面识别模块来动态切换模式。
仿真模型里藏了个小彩蛋:当系统连续工作10秒后会触发"狂暴模式",自动切换到更激进的控制参数。虽然实车肯定不敢这么玩,但在仿真里看车辆突然变身灵活死胖子还是挺带感的——前提是别把仿真时长设得太长,不然小心显卡冒烟。

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 8
8 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)