VS+QT+Opencv+海康SDK
链接器->输入->附加依赖项->添加opencv_world450.lib。C/C++ ->附加包含目录->添加海康头文件。1、打开VS2022,新建qt项目。至此,环境配置完成,可以进行测试。
·
1、打开VS2022,新建qt项目
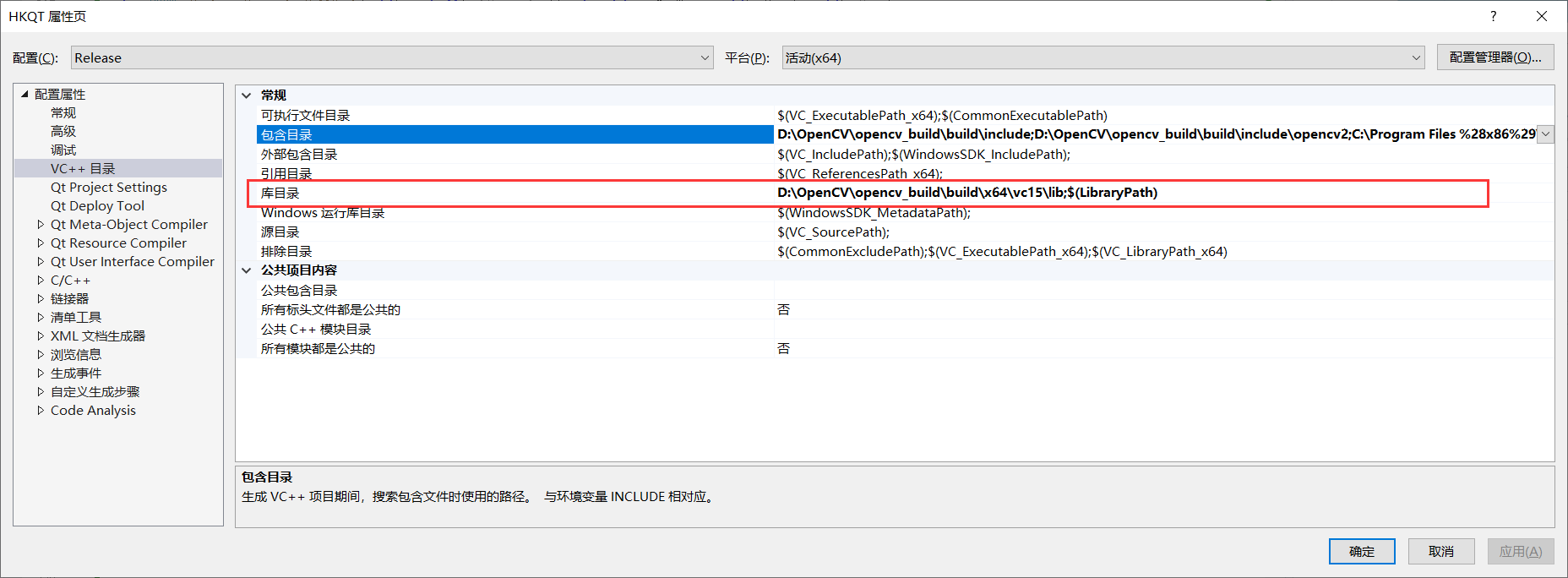
2、配置opencv环境:
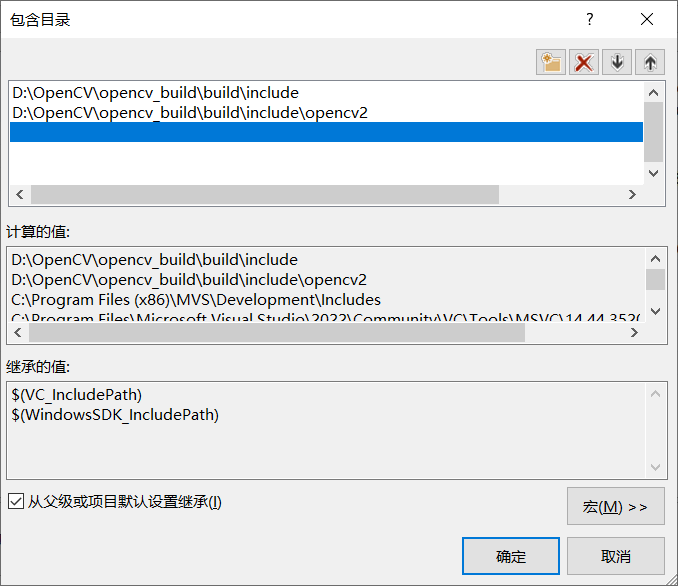
添加头文件目录:
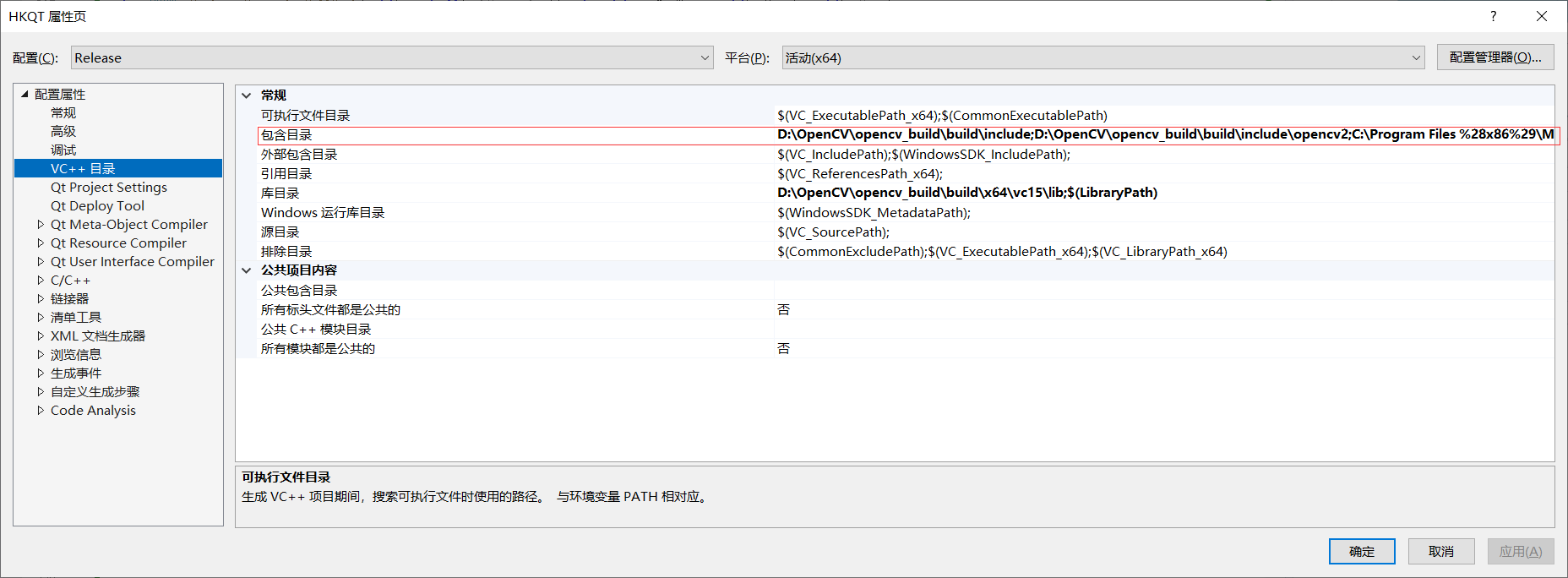
添加库目录:
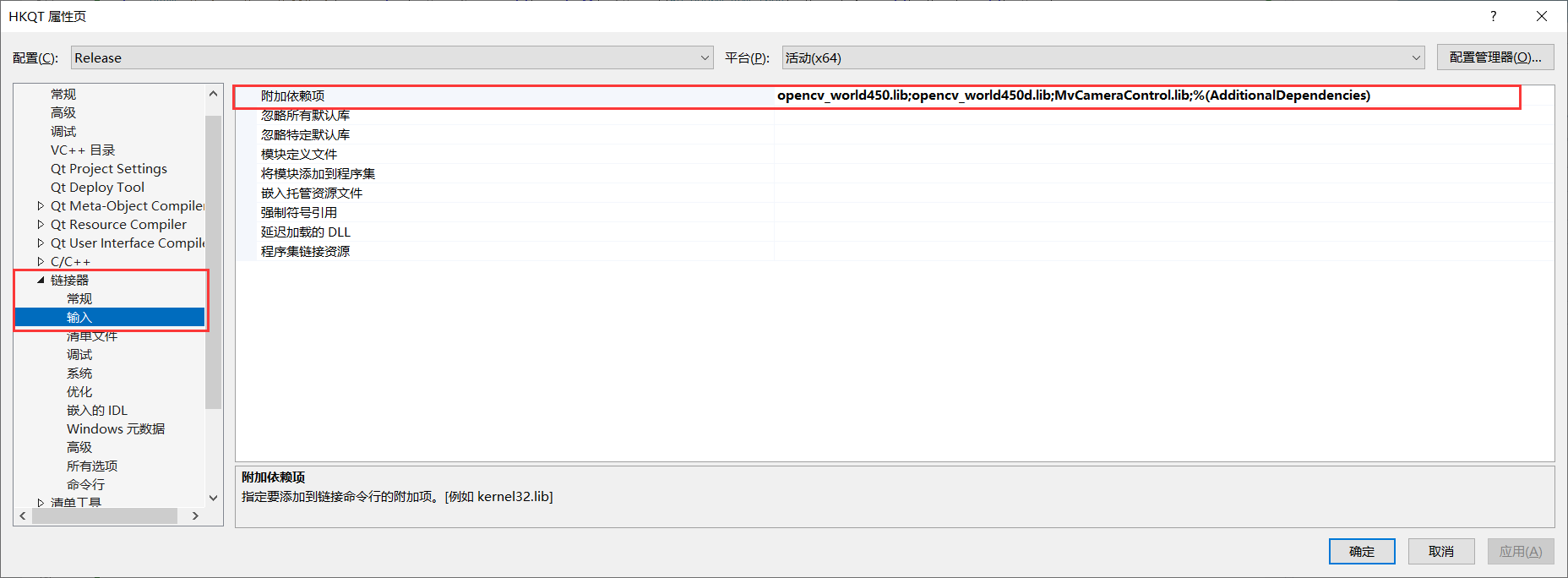
添加库文件:
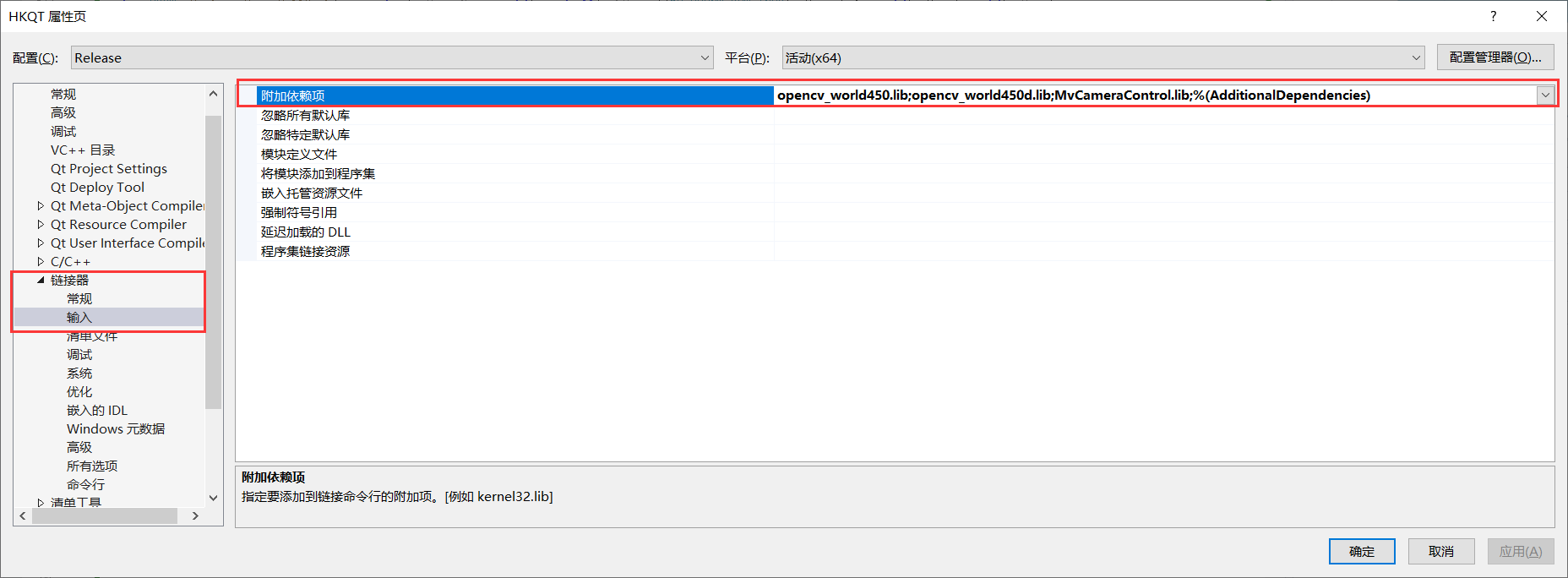
链接器->输入->附加依赖项->添加opencv_world450.lib
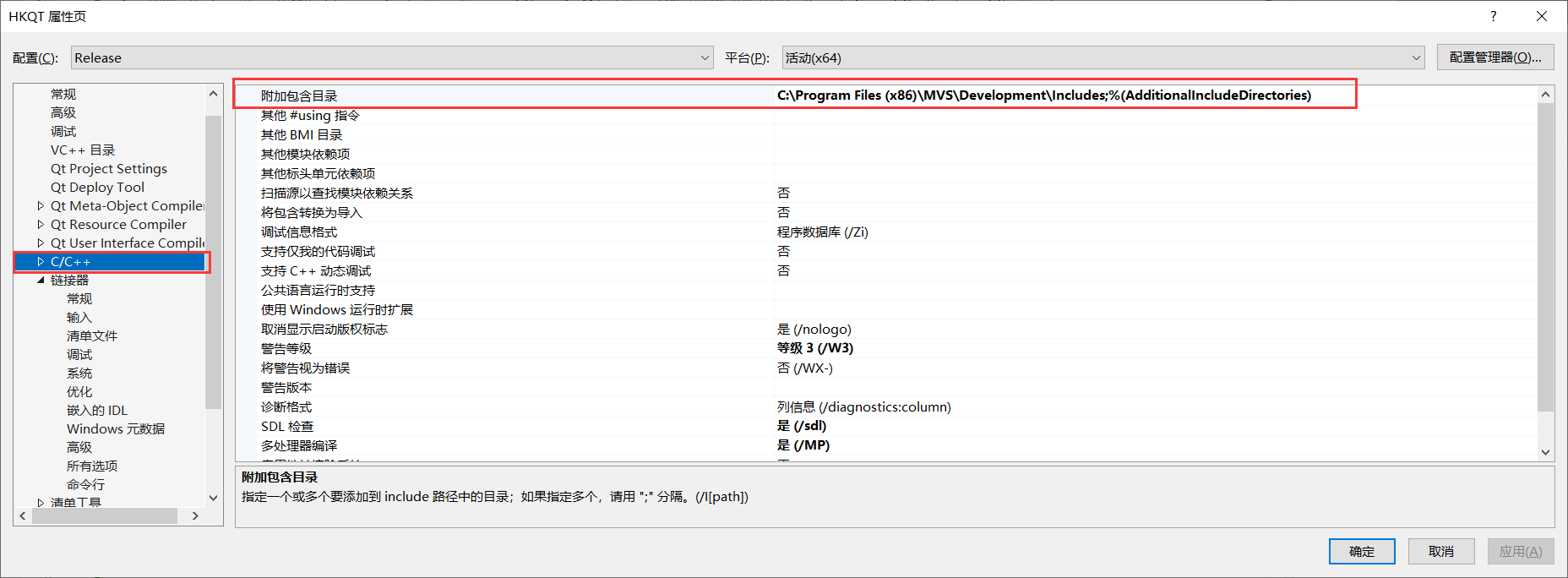
3、配置海康环境:
C/C++ ->附加包含目录->添加海康头文件
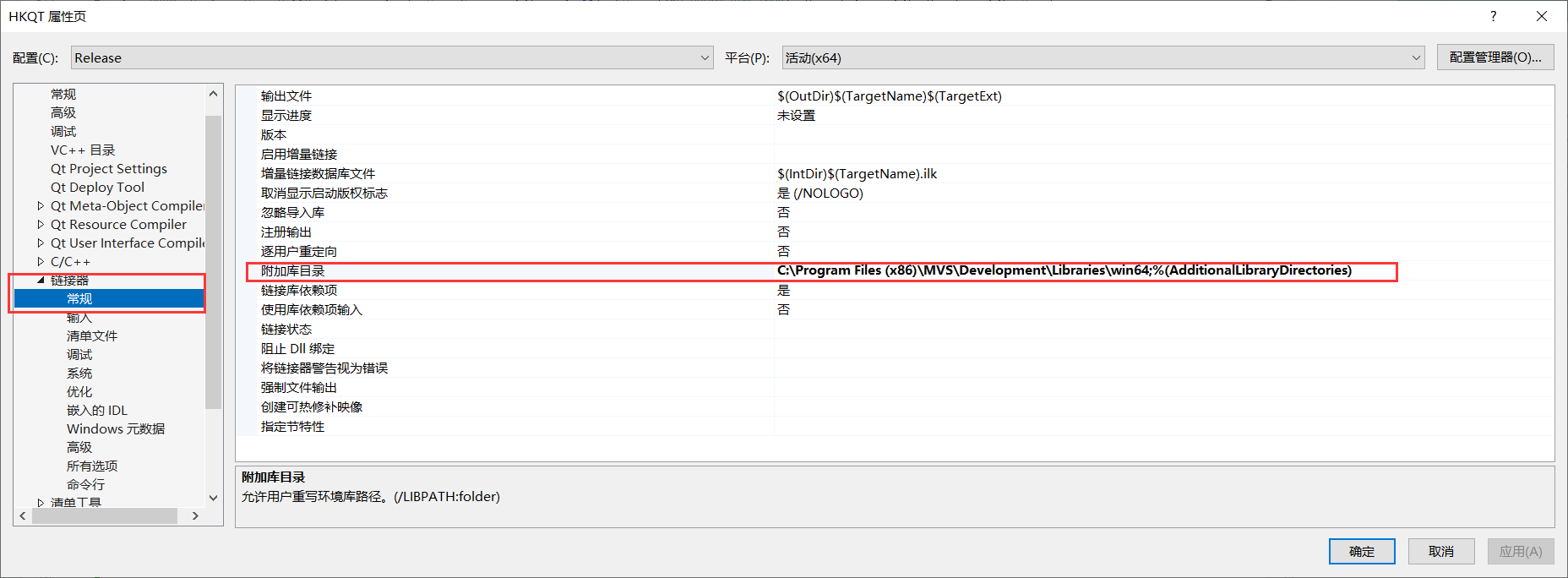
添加库目录:
链接器->常规->附加库目录:
添加库文件:
链接器->输入->附加依赖项:
至此,环境配置完成,可以进行测试。
4、测试:
HKQT.h:
#pragma once
#include <QtWidgets/QMainWindow>
#include "ui_HKQT.h"
#include"MvCameraControl.h"
#include<string.h>
#ifndef MV_NULL
#define MV_NULL 0
#endif
//class 子类 : public 父类 {}
//使用virtua来修饰的,虚函数就是用在类的继承上的,父类的函数可以被子类来修改掉。
class HKQT : public QMainWindow
{
Q_OBJECT
public:
HKQT(QWidget *parent = nullptr);
~HKQT();
// ch:获取SDK版本号 | en:Get SDK Version
static int GetSDKVersion();
// ch:枚举设备 | en:Enumerate Device
static int EnumDevices(unsigned int nTLayerType, MV_CC_DEVICE_INFO_LIST* pstDevList);
// ch:判断设备是否可达 | en:Is the device accessible
static bool IsDeviceAccessible(MV_CC_DEVICE_INFO* pstDevInfo, unsigned int nAccessMode);
// ch:打开设备 | en:Open Device
int Open(MV_CC_DEVICE_INFO* pstDeviceInfo);
// ch:关闭设备 | en:Close Device
int Close();
// ch:判断相机是否处于连接状态 | en:Is The Device Connected
bool IsDeviceConnected();
// ch:注册图像数据回调 | en:Register Image Data CallBack
int RegisterImageCallBack(void(__stdcall* cbOutput)(unsigned char* pData, MV_FRAME_OUT_INFO_EX* pFrameInfo, void* pUser), void* pUser);
// ch:开启抓图 | en:Start Grabbing
int StartGrabbing();
// ch:停止抓图 | en:Stop Grabbing
int StopGrabbing();
// ch:主动获取一帧图像数据 | en:Get one frame initiatively
int GetImageBuffer(MV_FRAME_OUT* pFrame, int nMsec);
// ch:释放图像缓存 | en:Free image buffer
int FreeImageBuffer(MV_FRAME_OUT* pFrame);
// ch:显示一帧图像 | en:Display one frame image
int DisplayOneFrame(MV_DISPLAY_FRAME_INFO* pDisplayInfo);
// ch:设置SDK内部图像缓存节点个数 | en:Set the number of the internal image cache nodes in SDK
int SetImageNodeNum(unsigned int nNum);
// ch:获取设备信息 | en:Get device information
int GetDeviceInfo(MV_CC_DEVICE_INFO* pstDevInfo);
// ch:获取GEV相机的统计信息 | en:Get detect info of GEV camera
int GetGevAllMatchInfo(MV_MATCH_INFO_NET_DETECT* pMatchInfoNetDetect);
// ch:获取U3V相机的统计信息 | en:Get detect info of U3V camera
int GetU3VAllMatchInfo(MV_MATCH_INFO_USB_DETECT* pMatchInfoUSBDetect);
// ch:获取和设置Int型参数,如 Width和Height,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件
// en:Get Int type parameters, such as Width and Height, for details please refer to MvCameraNode.xlsx file under SDK installation directory
int GetIntValue(IN const char* strKey, OUT MVCC_INTVALUE_EX* pIntValue);
int SetIntValue(IN const char* strKey, IN int64_t nValue);
// ch:获取和设置Enum型参数,如 PixelFormat,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件
// en:Get Enum type parameters, such as PixelFormat, for details please refer to MvCameraNode.xlsx file under SDK installation directory
int GetEnumValue(IN const char* strKey, OUT MVCC_ENUMVALUE* pEnumValue);
int SetEnumValue(IN const char* strKey, IN unsigned int nValue);
int SetEnumValueByString(IN const char* strKey, IN const char* sValue);
int GetEnumEntrySymbolic(IN const char* strKey, IN MVCC_ENUMENTRY* pstEnumEntry);
// ch:获取和设置Float型参数,如 ExposureTime和Gain,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件
// en:Get Float type parameters, such as ExposureTime and Gain, for details please refer to MvCameraNode.xlsx file under SDK installation directory
int GetFloatValue(IN const char* strKey, OUT MVCC_FLOATVALUE* pFloatValue);
int SetFloatValue(IN const char* strKey, IN float fValue);
// ch:获取和设置Bool型参数,如 ReverseX,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件
// en:Get Bool type parameters, such as ReverseX, for details please refer to MvCameraNode.xlsx file under SDK installation directory
int GetBoolValue(IN const char* strKey, OUT bool* pbValue);
int SetBoolValue(IN const char* strKey, IN bool bValue);
// ch:获取和设置String型参数,如 DeviceUserID,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件UserSetSave
// en:Get String type parameters, such as DeviceUserID, for details please refer to MvCameraNode.xlsx file under SDK installation directory
int GetStringValue(IN const char* strKey, MVCC_STRINGVALUE* pStringValue);
int SetStringValue(IN const char* strKey, IN const char* strValue);
// ch:执行一次Command型命令,如 UserSetSave,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件
// en:Execute Command once, such as UserSetSave, for details please refer to MvCameraNode.xlsx file under SDK installation directory
int CommandExecute(IN const char* strKey);
// ch:探测网络最佳包大小(只对GigE相机有效) | en:Detection network optimal package size(It only works for the GigE camera)
int GetOptimalPacketSize(unsigned int* pOptimalPacketSize);
// ch:注册消息异常回调 | en:Register Message Exception CallBack
int RegisterExceptionCallBack(void(__stdcall* cbException)(unsigned int nMsgType, void* pUser), void* pUser);
// ch:注册单个事件回调 | en:Register Event CallBack
int RegisterEventCallBack(const char* pEventName, void(__stdcall* cbEvent)(MV_EVENT_OUT_INFO* pEventInfo, void* pUser), void* pUser);
// ch:强制IP | en:Force IP
int ForceIp(unsigned int nIP, unsigned int nSubNetMask, unsigned int nDefaultGateWay);
// ch:配置IP方式 | en:IP configuration method
int SetIpConfig(unsigned int nType);
// ch:设置网络传输模式 | en:Set Net Transfer Mode
int SetNetTransMode(unsigned int nType);
// ch:像素格式转换 | en:Pixel format conversion
int ConvertPixelType(MV_CC_PIXEL_CONVERT_PARAM* pstCvtParam);
// ch:保存图片 | en:save image
int SaveImage(MV_SAVE_IMAGE_PARAM_EX* pstParam);
// ch:保存图片为文件 | en:Save the image as a file
int SaveImageToFile(MV_SAVE_IMG_TO_FILE_PARAM* pstParam);
// ch:绘制圆形辅助线 | en:Draw circle auxiliary line
int DrawCircle(MVCC_CIRCLE_INFO* pCircleInfo);
// ch:绘制线形辅助线 | en:Draw lines auxiliary line
int DrawLines(MVCC_LINES_INFO* pLinesInfo);
private slots:
public slots:
void on_OpenBtn_clicked();
void on_refreshBtn_clicked();
private:
Ui::HKQTClass ui;
void* m_hDevHandle;
};
HKQT.cpp
#include "HKQT.h"
#include<opencv2/opencv.hpp>
#include<opencv2/core/core.hpp>
#include<opencv2/imgproc.hpp>
#include<opencv2/highgui/highgui.hpp>
#include<iostream>
#include<QDebug>
#include<qimage.h>
#include<qmessagebox.h>
#include<qfiledialog.h>
using namespace cv;
using namespace std;
unsigned int g_nPayloadSize = 0; //海康相机用的变量
HKQT::HKQT(QWidget *parent)
: QMainWindow(parent)
{
if (m_hDevHandle)
{
MV_CC_DestroyHandle(m_hDevHandle);
m_hDevHandle = MV_NULL;
}
ui.setupUi(this);
}
//析构函数,对象删除的时候调用
HKQT::~HKQT()
{
//delete ui;
}
// ch:获取SDK版本号 | en:Get SDK Version
int HKQT::GetSDKVersion()
{
return MV_CC_GetSDKVersion();
}
// ch:枚举设备 | en:Enumerate Device
int HKQT::EnumDevices(unsigned int nTLayerType, MV_CC_DEVICE_INFO_LIST* pstDevList)
{
return MV_CC_EnumDevices(nTLayerType, pstDevList);
}
// ch:判断设备是否可达 | en:Is the device accessible
bool HKQT::IsDeviceAccessible(MV_CC_DEVICE_INFO* pstDevInfo, unsigned int nAccessMode)
{
return MV_CC_IsDeviceAccessible(pstDevInfo, nAccessMode);
}
// ch:打开设备 | en:Open Device
int HKQT::Open(MV_CC_DEVICE_INFO* pstDeviceInfo)
{
if (MV_NULL == pstDeviceInfo)
{
return MV_E_PARAMETER;
}
if (m_hDevHandle)
{
return MV_E_CALLORDER;
}
int nRet = MV_CC_CreateHandle(&m_hDevHandle, pstDeviceInfo);
if (MV_OK != nRet)
{
return nRet;
}
nRet = MV_CC_OpenDevice(m_hDevHandle);
if (MV_OK != nRet)
{
MV_CC_DestroyHandle(m_hDevHandle);
m_hDevHandle = MV_NULL;
}
return nRet;
}
// ch:关闭设备 | en:Close Device
int HKQT::Close()
{
if (MV_NULL == m_hDevHandle)
{
return MV_E_HANDLE;
}
MV_CC_CloseDevice(m_hDevHandle);
int nRet = MV_CC_DestroyHandle(m_hDevHandle);
m_hDevHandle = MV_NULL;
return nRet;
}
// ch:判断相机是否处于连接状态 | en:Is The Device Connected
bool HKQT::IsDeviceConnected()
{
return MV_CC_IsDeviceConnected(m_hDevHandle);
}
// ch:注册图像数据回调 | en:Register Image Data CallBack
int HKQT::RegisterImageCallBack(void(__stdcall* cbOutput)(unsigned char* pData, MV_FRAME_OUT_INFO_EX* pFrameInfo, void* pUser), void* pUser)
{
return MV_CC_RegisterImageCallBackEx(m_hDevHandle, cbOutput, pUser);
}
// ch:开启抓图 | en:Start Grabbing
int HKQT::StartGrabbing()
{
return MV_CC_StartGrabbing(m_hDevHandle);
}
// ch:停止抓图 | en:Stop Grabbing
int HKQT::StopGrabbing()
{
return MV_CC_StopGrabbing(m_hDevHandle);
}
// ch:主动获取一帧图像数据 | en:Get one frame initiatively
int HKQT::GetImageBuffer(MV_FRAME_OUT* pFrame, int nMsec)
{
return MV_CC_GetImageBuffer(m_hDevHandle, pFrame, nMsec);
}
// ch:释放图像缓存 | en:Free image buffer
int HKQT::FreeImageBuffer(MV_FRAME_OUT* pFrame)
{
return MV_CC_FreeImageBuffer(m_hDevHandle, pFrame);
}
// ch:设置显示窗口句柄 | en:Set Display Window Handle
int HKQT::DisplayOneFrame(MV_DISPLAY_FRAME_INFO* pDisplayInfo)
{
return MV_CC_DisplayOneFrame(m_hDevHandle, pDisplayInfo);
}
// ch:设置SDK内部图像缓存节点个数 | en:Set the number of the internal image cache nodes in SDK
int HKQT::SetImageNodeNum(unsigned int nNum)
{
return MV_CC_SetImageNodeNum(m_hDevHandle, nNum);
}
// ch:获取设备信息 | en:Get device information
int HKQT::GetDeviceInfo(MV_CC_DEVICE_INFO* pstDevInfo)
{
return MV_CC_GetDeviceInfo(m_hDevHandle, pstDevInfo);
}
// ch:获取GEV相机的统计信息 | en:Get detect info of GEV camera
int HKQT::GetGevAllMatchInfo(MV_MATCH_INFO_NET_DETECT* pMatchInfoNetDetect)
{
if (MV_NULL == pMatchInfoNetDetect)
{
return MV_E_PARAMETER;
}
MV_CC_DEVICE_INFO stDevInfo = { 0 };
GetDeviceInfo(&stDevInfo);
if (stDevInfo.nTLayerType != MV_GIGE_DEVICE)
{
return MV_E_SUPPORT;
}
MV_ALL_MATCH_INFO struMatchInfo = { 0 };
struMatchInfo.nType = MV_MATCH_TYPE_NET_DETECT;
struMatchInfo.pInfo = pMatchInfoNetDetect;
struMatchInfo.nInfoSize = sizeof(MV_MATCH_INFO_NET_DETECT);
memset(struMatchInfo.pInfo, 0, sizeof(MV_MATCH_INFO_NET_DETECT));
return MV_CC_GetAllMatchInfo(m_hDevHandle, &struMatchInfo);
}
// ch:获取U3V相机的统计信息 | en:Get detect info of U3V camera
int HKQT::GetU3VAllMatchInfo(MV_MATCH_INFO_USB_DETECT* pMatchInfoUSBDetect)
{
if (MV_NULL == pMatchInfoUSBDetect)
{
return MV_E_PARAMETER;
}
MV_CC_DEVICE_INFO stDevInfo = { 0 };
GetDeviceInfo(&stDevInfo);
if (stDevInfo.nTLayerType != MV_USB_DEVICE)
{
return MV_E_SUPPORT;
}
MV_ALL_MATCH_INFO struMatchInfo = { 0 };
struMatchInfo.nType = MV_MATCH_TYPE_USB_DETECT;
struMatchInfo.pInfo = pMatchInfoUSBDetect;
struMatchInfo.nInfoSize = sizeof(MV_MATCH_INFO_USB_DETECT);
memset(struMatchInfo.pInfo, 0, sizeof(MV_MATCH_INFO_USB_DETECT));
return MV_CC_GetAllMatchInfo(m_hDevHandle, &struMatchInfo);
}
// ch:获取和设置Int型参数,如 Width和Height,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件
// en:Get Int type parameters, such as Width and Height, for details please refer to MvCameraNode.xlsx file under SDK installation directory
int HKQT::GetIntValue(IN const char* strKey, OUT MVCC_INTVALUE_EX* pIntValue)
{
return MV_CC_GetIntValueEx(m_hDevHandle, strKey, pIntValue);
}
int HKQT::SetIntValue(IN const char* strKey, IN int64_t nValue)
{
return MV_CC_SetIntValueEx(m_hDevHandle, strKey, nValue);
}
// ch:获取和设置Enum型参数,如 PixelFormat,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件
// en:Get Enum type parameters, such as PixelFormat, for details please refer to MvCameraNode.xlsx file under SDK installation directory
int HKQT::GetEnumValue(IN const char* strKey, OUT MVCC_ENUMVALUE* pEnumValue)
{
return MV_CC_GetEnumValue(m_hDevHandle, strKey, pEnumValue);
}
int HKQT::SetEnumValue(IN const char* strKey, IN unsigned int nValue)
{
return MV_CC_SetEnumValue(m_hDevHandle, strKey, nValue);
}
int HKQT::SetEnumValueByString(IN const char* strKey, IN const char* sValue)
{
return MV_CC_SetEnumValueByString(m_hDevHandle, strKey, sValue);
}
int HKQT::GetEnumEntrySymbolic(IN const char* strKey, IN MVCC_ENUMENTRY* pstEnumEntry)
{
return MV_CC_GetEnumEntrySymbolic(m_hDevHandle, strKey, pstEnumEntry);
}
// ch:获取和设置Float型参数,如 ExposureTime和Gain,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件
// en:Get Float type parameters, such as ExposureTime and Gain, for details please refer to MvCameraNode.xlsx file under SDK installation directory
int HKQT::GetFloatValue(IN const char* strKey, OUT MVCC_FLOATVALUE* pFloatValue)
{
return MV_CC_GetFloatValue(m_hDevHandle, strKey, pFloatValue);
}
int HKQT::SetFloatValue(IN const char* strKey, IN float fValue)
{
return MV_CC_SetFloatValue(m_hDevHandle, strKey, fValue);
}
// ch:获取和设置Bool型参数,如 ReverseX,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件
// en:Get Bool type parameters, such as ReverseX, for details please refer to MvCameraNode.xlsx file under SDK installation directory
int HKQT::GetBoolValue(IN const char* strKey, OUT bool* pbValue)
{
return MV_CC_GetBoolValue(m_hDevHandle, strKey, pbValue);
}
int HKQT::SetBoolValue(IN const char* strKey, IN bool bValue)
{
return MV_CC_SetBoolValue(m_hDevHandle, strKey, bValue);
}
// ch:获取和设置String型参数,如 DeviceUserID,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件UserSetSave
// en:Get String type parameters, such as DeviceUserID, for details please refer to MvCameraNode.xlsx file under SDK installation directory
int HKQT::GetStringValue(IN const char* strKey, MVCC_STRINGVALUE* pStringValue)
{
return MV_CC_GetStringValue(m_hDevHandle, strKey, pStringValue);
}
int HKQT::SetStringValue(IN const char* strKey, IN const char* strValue)
{
return MV_CC_SetStringValue(m_hDevHandle, strKey, strValue);
}
// ch:执行一次Command型命令,如 UserSetSave,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件
// en:Execute Command once, such as UserSetSave, for details please refer to MvCameraNode.xlsx file under SDK installation directory
int HKQT::CommandExecute(IN const char* strKey)
{
return MV_CC_SetCommandValue(m_hDevHandle, strKey);
}
// ch:探测网络最佳包大小(只对GigE相机有效) | en:Detection network optimal package size(It only works for the GigE camera)
int HKQT::GetOptimalPacketSize(unsigned int* pOptimalPacketSize)
{
if (MV_NULL == pOptimalPacketSize)
{
return MV_E_PARAMETER;
}
int nRet = MV_CC_GetOptimalPacketSize(m_hDevHandle);
if (nRet < MV_OK)
{
return nRet;
}
*pOptimalPacketSize = (unsigned int)nRet;
return MV_OK;
}
// ch:注册消息异常回调 | en:Register Message Exception CallBack
int HKQT::RegisterExceptionCallBack(void(__stdcall* cbException)(unsigned int nMsgType, void* pUser), void* pUser)
{
return MV_CC_RegisterExceptionCallBack(m_hDevHandle, cbException, pUser);
}
// ch:注册单个事件回调 | en:Register Event CallBack
int HKQT::RegisterEventCallBack(const char* pEventName, void(__stdcall* cbEvent)(MV_EVENT_OUT_INFO* pEventInfo, void* pUser), void* pUser)
{
return MV_CC_RegisterEventCallBackEx(m_hDevHandle, pEventName, cbEvent, pUser);
}
// ch:强制IP | en:Force IP
int HKQT::ForceIp(unsigned int nIP, unsigned int nSubNetMask, unsigned int nDefaultGateWay)
{
return MV_GIGE_ForceIpEx(m_hDevHandle, nIP, nSubNetMask, nDefaultGateWay);
}
// ch:配置IP方式 | en:IP configuration method
int HKQT::SetIpConfig(unsigned int nType)
{
return MV_GIGE_SetIpConfig(m_hDevHandle, nType);
}
// ch:设置网络传输模式 | en:Set Net Transfer Mode
int HKQT::SetNetTransMode(unsigned int nType)
{
return MV_GIGE_SetNetTransMode(m_hDevHandle, nType);
}
// ch:像素格式转换 | en:Pixel format conversion
int HKQT::ConvertPixelType(MV_CC_PIXEL_CONVERT_PARAM* pstCvtParam)
{
return MV_CC_ConvertPixelType(m_hDevHandle, pstCvtParam);
}
// ch:保存图片 | en:save image
int HKQT::SaveImage(MV_SAVE_IMAGE_PARAM_EX* pstParam)
{
return MV_CC_SaveImageEx2(m_hDevHandle, pstParam);
}
// ch:保存图片为文件 | en:Save the image as a file
int HKQT::SaveImageToFile(MV_SAVE_IMG_TO_FILE_PARAM* pstSaveFileParam)
{
return MV_CC_SaveImageToFile(m_hDevHandle, pstSaveFileParam);
}
// ch:绘制圆形辅助线 | en:Draw circle auxiliary line
int HKQT::DrawCircle(MVCC_CIRCLE_INFO* pCircleInfo)
{
return MV_CC_DrawCircle(m_hDevHandle, pCircleInfo);
}
// ch:绘制线形辅助线 | en:Draw lines auxiliary line
int HKQT::DrawLines(MVCC_LINES_INFO* pLinesInfo)
{
return MV_CC_DrawLines(m_hDevHandle, pLinesInfo);
}
bool PrintDeviceInfo(MV_CC_DEVICE_INFO* pstMVDevInfo)
{
if (NULL == pstMVDevInfo)
{
printf("The Pointer of pstMVDevInfo is NULL!\n");
return false;
}
if (pstMVDevInfo->nTLayerType == MV_GIGE_DEVICE)
{
int nIp1 = ((pstMVDevInfo->SpecialInfo.stGigEInfo.nCurrentIp & 0xff000000) >> 24);
int nIp2 = ((pstMVDevInfo->SpecialInfo.stGigEInfo.nCurrentIp & 0x00ff0000) >> 16);
int nIp3 = ((pstMVDevInfo->SpecialInfo.stGigEInfo.nCurrentIp & 0x0000ff00) >> 8);
int nIp4 = (pstMVDevInfo->SpecialInfo.stGigEInfo.nCurrentIp & 0x000000ff);
// print current ip and user defined name
printf("CurrentIp: %d.%d.%d.%d\n", nIp1, nIp2, nIp3, nIp4);
printf("UserDefinedName: %s\n\n", pstMVDevInfo->SpecialInfo.stGigEInfo.chUserDefinedName);
}
else if (pstMVDevInfo->nTLayerType == MV_USB_DEVICE)
{
printf("UserDefinedName: %s\n", pstMVDevInfo->SpecialInfo.stUsb3VInfo.chUserDefinedName);
printf("Serial Number: %s\n", pstMVDevInfo->SpecialInfo.stUsb3VInfo.chSerialNumber);
printf("Device Number: %d\n\n", pstMVDevInfo->SpecialInfo.stUsb3VInfo.nDeviceNumber);
}
else
{
printf("Not support.\n");
}
return true;
}
int RGB2BGR(unsigned char* pRgbData, unsigned int nWidth, unsigned int nHeight)
{
if (NULL == pRgbData)
{
return MV_E_PARAMETER;
}
for (unsigned int j = 0; j < nHeight; j++)
{
for (unsigned int i = 0; i < nWidth; i++)
{
unsigned char red = pRgbData[j * (nWidth * 3) + i * 3];
pRgbData[j * (nWidth * 3) + i * 3] = pRgbData[j * (nWidth * 3) + i * 3 + 2];
pRgbData[j * (nWidth * 3) + i * 3 + 2] = red;
}
}
return MV_OK;
}
// convert data stream in Mat format
bool Convert2Mat(MV_FRAME_OUT_INFO_EX* pstImageInfo, unsigned char* pData)
{
cv::Mat srcImage;
if (pstImageInfo->enPixelType == PixelType_Gvsp_Mono8)
{
srcImage = cv::Mat(pstImageInfo->nHeight, pstImageInfo->nWidth, CV_8UC1, pData);
}
else if (pstImageInfo->enPixelType == PixelType_Gvsp_RGB8_Packed)
{
RGB2BGR(pData, pstImageInfo->nWidth, pstImageInfo->nHeight);
srcImage = cv::Mat(pstImageInfo->nHeight, pstImageInfo->nWidth, CV_8UC3, pData);
}
else
{
printf("unsupported pixel format\n");
return false;
}
if (NULL == srcImage.data)
{
return false;
}
//save converted image in a local file
try {
#if defined (VC9_COMPILE)
cvSaveImage("MatImage.bmp", &(IplImage(srcImage)));
#else
cv::imwrite("MatImage.jpg", srcImage); //存储到工程所在的文件夹内
#endif
}
catch (cv::Exception& ex) {
fprintf(stderr, "Exception saving image to bmp format: %s\n", ex.what());
}
srcImage.release();
return true;
}
void HKQT::on_OpenBtn_clicked(){
//QString filePath = QFileDialog::getOpenFileName(
// this, "选择图片", "", "图像文件 (*.png *.jpg *.jpeg *.bmp)");
//if (filePath.isEmpty())
// return;
//
//qDebug() << filePath;
//Mat img = imread(filePath.toStdString());
////imshow("test", img);
//Mat imshow;
//if (img.empty()) {
// QMessageBox::critical(this, "错误", "无法加载图像!");
// return;
//}
//cvtColor(img, imshow, COLOR_BGR2RGB);
//// 创建QImage对象
//
//QImage qImage(
// imshow.data,
// imshow.cols,
// imshow.rows,
// imshow.step,
// QImage::Format_RGB888
//);
//// 在QLabel中显示图像
//ui.imageLabel->setPixmap(QPixmap::fromImage(qImage));
//
//ui.imageLabel->setScaledContents(true); // 图像自动适应标签大小
//ui.OpenBtn->setText("close");
//qDebug() << "hello";
}
void HKQT::on_refreshBtn_clicked()
{
int nRet = MV_OK;
void* handle = NULL;
QString cameraName;
do
{
// Enum device
MV_CC_DEVICE_INFO_LIST stDeviceList;
memset(&stDeviceList, 0, sizeof(MV_CC_DEVICE_INFO_LIST));
nRet = MV_CC_EnumDevices(MV_GIGE_DEVICE | MV_USB_DEVICE, &stDeviceList);
if (MV_OK != nRet)
{
printf("Enum Devices fail! nRet [0x%x]\n", nRet);
break;
}
if (stDeviceList.nDeviceNum > 0)
{
for (unsigned int i = 0; i < stDeviceList.nDeviceNum; i++)
{
printf("[device %d]:\n", i);
MV_CC_DEVICE_INFO* pDeviceInfo = stDeviceList.pDeviceInfo[i];
if (NULL == pDeviceInfo)
{
break;
}
PrintDeviceInfo(pDeviceInfo);
if (pDeviceInfo->nTLayerType == MV_GIGE_DEVICE) {
MV_GIGE_DEVICE_INFO* pGigEDeviceInfo = &pDeviceInfo->SpecialInfo.stGigEInfo;
// 转换unsigned char[]为QString
QString modelName = QString::fromUtf8(reinterpret_cast<const char*>(pGigEDeviceInfo->chModelName));
//QString ipAddress = QString::fromUtf8(reinterpret_cast<const char*>(pGigEDeviceInfo->chIPAddress));
cameraName = QString("GigE: %1").arg(modelName);
}
else if (pDeviceInfo->nTLayerType == MV_USB_DEVICE) {
MV_USB3_DEVICE_INFO* pUsb3DeviceInfo = &pDeviceInfo->SpecialInfo.stUsb3VInfo;
// 转换unsigned char[]为QString
QString modelName = QString::fromUtf8(reinterpret_cast<const char*>(pUsb3DeviceInfo->chModelName));
QString serialNumber = QString::fromUtf8(reinterpret_cast<const char*>(pUsb3DeviceInfo->chSerialNumber));
cameraName = QString("USB: %1 (%2)").arg(modelName).arg(serialNumber);
}
// 添加到ComboBox,并关联设备索引
ui.DeciceListcombo->addItem(cameraName, QVariant(i));
}
}
else
{
printf("Find No Devices!\n");
break;
}
// input the format to convert
unsigned int nFormat = 0; //[0] OpenCV_Mat\n,[1] OpenCV_IplImage\n,此处等于0,将海康图像转换为OpenCV4.5中的Mat格式,IplImage格式为OpenCV2用的
// select device to connect
unsigned int nIndex = 0; //nIndex=0为枚举到的第一个摄像头,多个摄像头一次加1
if (nIndex >= stDeviceList.nDeviceNum)
{
printf("Input CameraIndex error!\n");
break;
}
// Select device and create handle
nRet = MV_CC_CreateHandle(&handle, stDeviceList.pDeviceInfo[nIndex]);
if (MV_OK != nRet)
{
printf("Create Handle fail! nRet [0x%x]\n", nRet);
break;
}
// open device
nRet = MV_CC_OpenDevice(handle);
if (MV_OK != nRet)
{
printf("Open Device fail! nRet [0x%x]\n", nRet);
break;
}
// Detection network optimal package size(It only works for the GigE camera)
if (stDeviceList.pDeviceInfo[nIndex]->nTLayerType == MV_GIGE_DEVICE)
{
int nPacketSize = MV_CC_GetOptimalPacketSize(handle);
if (nPacketSize > 0)
{
nRet = MV_CC_SetIntValue(handle, "GevSCPSPacketSize", nPacketSize);
if (nRet != MV_OK)
{
printf("Warning: Set Packet Size fail nRet [0x%x]!", nRet);
}
}
else
{
printf("Warning: Get Packet Size fail nRet [0x%x]!", nPacketSize);
}
}
// Set trigger mode as off
nRet = MV_CC_SetEnumValue(handle, "TriggerMode", 0);
if (MV_OK != nRet)
{
printf("Set Trigger Mode fail! nRet [0x%x]\n", nRet);
break;
}
// Get payload size
MVCC_INTVALUE stParam;
memset(&stParam, 0, sizeof(MVCC_INTVALUE));
nRet = MV_CC_GetIntValue(handle, "PayloadSize", &stParam);
if (MV_OK != nRet)
{
printf("Get PayloadSize fail! nRet [0x%x]\n", nRet);
break;
}
g_nPayloadSize = stParam.nCurValue;
// Start grab image
nRet = MV_CC_StartGrabbing(handle);
if (MV_OK != nRet)
{
printf("Start Grabbing fail! nRet [0x%x]\n", nRet);
break;
}
MV_FRAME_OUT_INFO_EX stImageInfo = { 0 };
memset(&stImageInfo, 0, sizeof(MV_FRAME_OUT_INFO_EX));
unsigned char* pData = (unsigned char*)malloc(sizeof(unsigned char) * (g_nPayloadSize));
if (pData == NULL)
{
printf("Allocate memory failed.\n");
break;
}
// get one frame from camera with timeout=1000ms
nRet = MV_CC_GetOneFrameTimeout(handle, pData, g_nPayloadSize, &stImageInfo, 1000);
if (nRet == MV_OK)
{
printf("Get One Frame: Width[%d], Height[%d], nFrameNum[%d]\n",
stImageInfo.nWidth, stImageInfo.nHeight, stImageInfo.nFrameNum);
}
else
{
printf("No data[0x%x]\n", nRet);
free(pData);
pData = NULL;
break;
}
// 数据去转换
bool bConvertRet = false;
if (0 == nFormat)
{
bConvertRet = Convert2Mat(&stImageInfo, pData);
}
else
{
//bConvertRet = Convert2Ipl(&stImageInfo, pData);
}
// print result
if (bConvertRet)
{
printf("OpenCV format convert finished.\n");
free(pData);
pData = NULL;
}
else
{
printf("OpenCV format convert failed.\n");
free(pData);
pData = NULL;
break;
}
// Stop grab image
nRet = MV_CC_StopGrabbing(handle);
if (MV_OK != nRet)
{
printf("Stop Grabbing fail! nRet [0x%x]\n", nRet);
break;
}
// Close device
nRet = MV_CC_CloseDevice(handle);
if (MV_OK != nRet)
{
printf("ClosDevice fail! nRet [0x%x]\n", nRet);
break;
}
// Destroy handle
nRet = MV_CC_DestroyHandle(handle);
if (MV_OK != nRet)
{
printf("Destroy Handle fail! nRet [0x%x]\n", nRet);
break;
}
//cv::Mat img = cv::imread("MatImage.jpg"); //从工程所在的文件夹内读取图片
//cv::Mat hsv;
//cv::Mat gray;
//cv::Mat hsvsplit[3];
Mat imshow;
imshow = imread("MatImage.jpg");
//创建QImage对象
if (imshow.empty()) {
QMessageBox::critical(this, "错误", "无法加载图像!");
return;
}
//
QImage qImage(
imshow.data,
imshow.cols,
imshow.rows,
imshow.step,
QImage::Format_RGB888);
// 在QLabel中显示图像
ui.imageLabel->setPixmap(QPixmap::fromImage(qImage));
ui.imageLabel->setScaledContents(true); // 图像自动适应标签大小
ui.OpenBtn->setText("close");
qDebug() << "hello";
} while (0);
}
main.cpp
#include "HKQT.h"
#include <QtWidgets/QApplication>
int main(int argc, char *argv[])
{
QApplication app(argc, argv);
HKQT window;
window.show();
return app.exec();
}
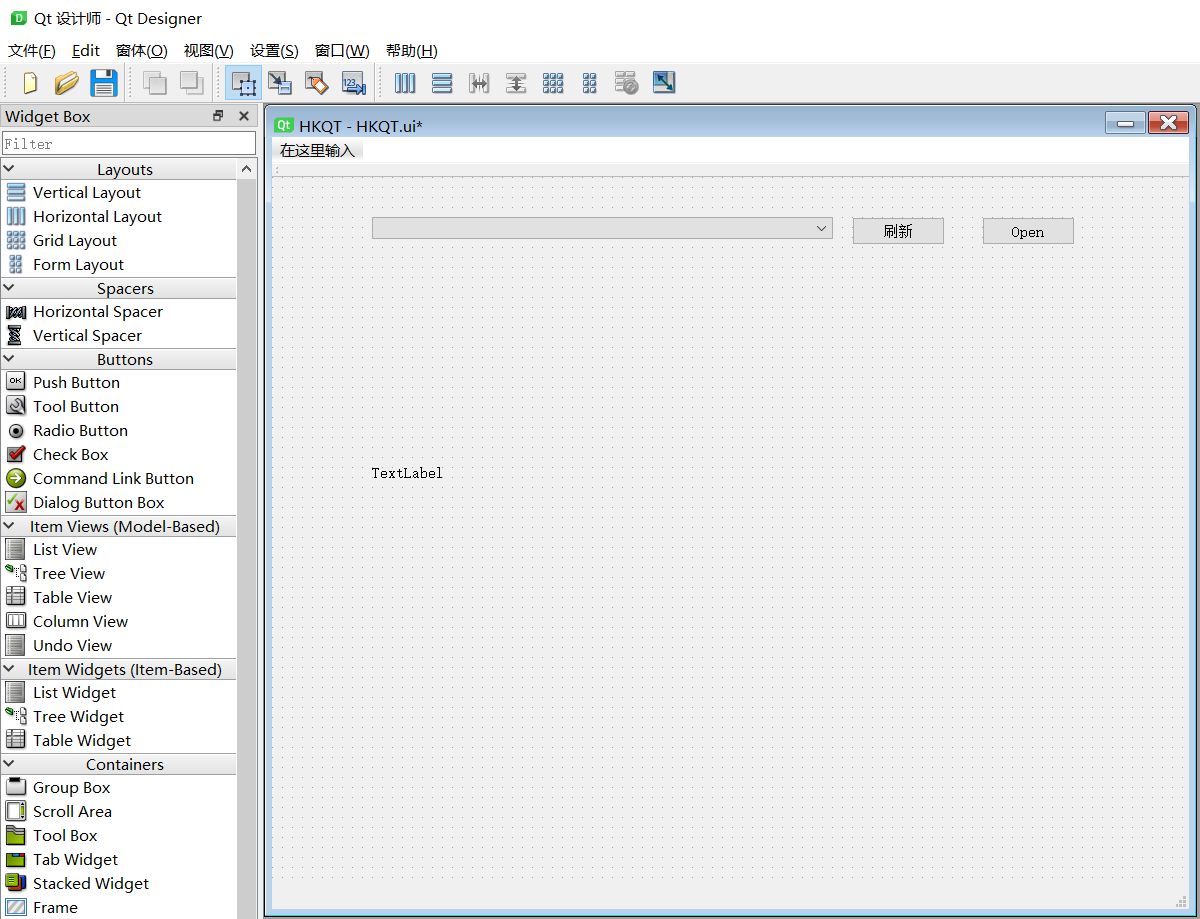
ui文件:
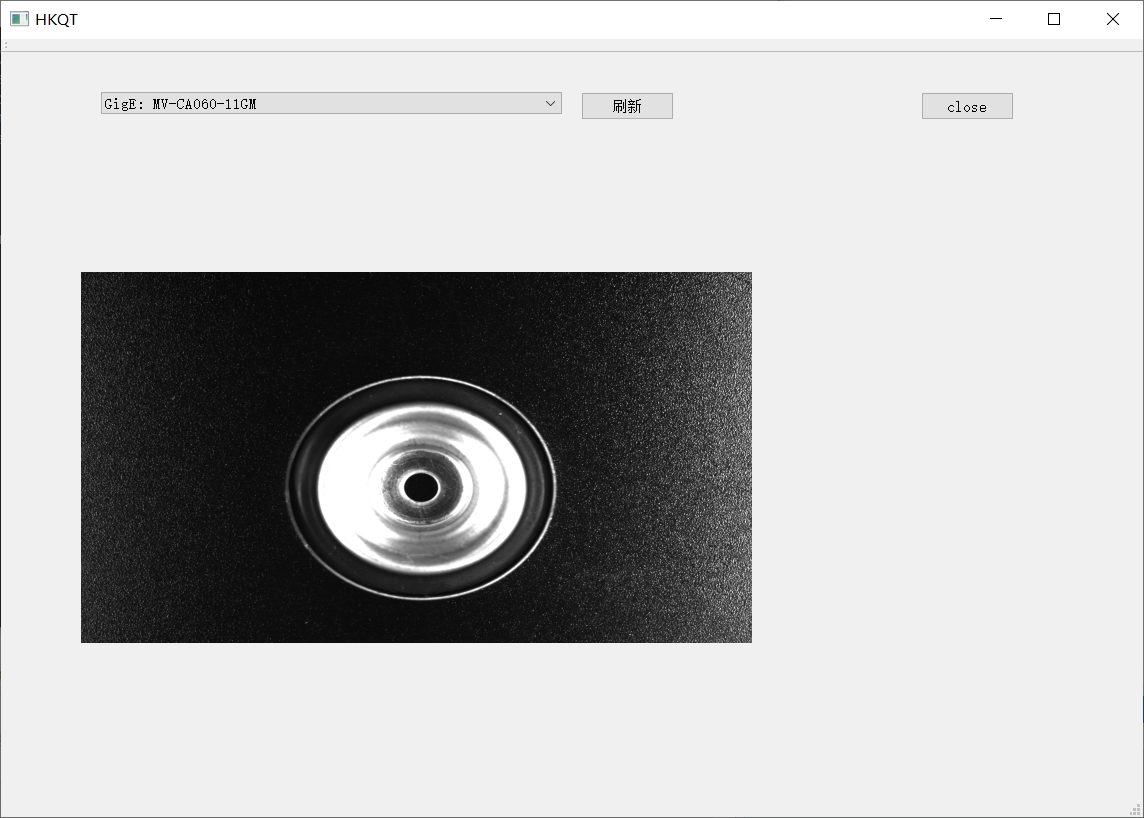
运行效果:

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 3
3 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)