阅读笔记:Sensor-Based Distributionally Robust Control for Safe Robot Navigation in Dynamic Environments
这篇论文是作者前面几个工作的综合,其主要涉及了CBF,CLF,DRO,LiDar,SDF等方面,由于论文很长,所以做一个报告进行记录方便后面查看。本文设计大量证明稳定性和Lipschitzness的内容,这里不做介绍,只介绍论文主要内容当存在状态估计误差(动捕)和雷达测量误差,并且是在未知环境下时,如何保证智能体的实时安全性?论文提出的算法框架为:CLF-DR-CBF,分别用到了CLF保证跟踪的稳
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
前言
这篇论文是作者前面几个工作的综合,其主要涉及了CBF,CLF,DRO,LiDar,SDF等方面,由于论文很长,所以做一个报告进行记录方便后面查看。本文设计大量证明稳定性和Lipschitzness的内容,这里不做介绍,只介绍论文主要内容
一、论文整体内容介绍
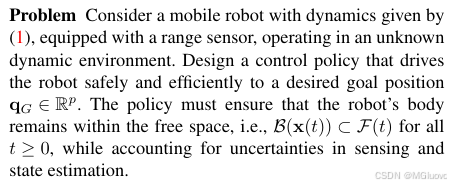
- 当存在状态估计误差(动捕)和雷达测量误差,并且是在未知环境下时,如何保证智能体的实时安全性?
- 论文提出的算法框架为:CLF-DR-CBF,分别用到了CLF保证跟踪的稳定性,CBF保证局部避障的安全性,DRO保证抗扰性。
- 对于存在不确定性时CBF的应用,通常会将约束转换为机会约束(chance
constraints),以概率的方式来表示,但通常会造成优化问题的非凸,作者通过引入VaR和CVaR概念,将约束转换为凸约束,并将其称之为Distributionally
robust safe control。 - 文中涉及到如何在未知环境下实时构建CBF,其中用到了SDF(signed distance function)
主要概念
x + = m a x ( x , 0 ) x_+=max(x,0) x+=max(x,0)
atan2(y,x)代表x轴与(x,y)的夹角
维数为 p 的特殊正交群记为 S O ( p ) = { R T R = I p , d e t ( R ) = 1 } SO(p)=\{ R^TR=I_p, det(R)=1 \} SO(p)={RTR=Ip,det(R)=1}
F ( t ) = R n ∖ O ( t ) \mathcal{F}(t)=\mathbb{R}^n \setminus O(t) F(t)=Rn∖O(t) 表示安全空间
二、CLF-CBF-QP
动力学表示为:
control Lyapunov constraint(CLC): C L C ( x , u ) ≤ 0 CLC(x,u) \le 0 CLC(x,u)≤0
不变集表示为:
则control barrier constraint(CBC): C B C ( x , u , t ) ≥ 0 CBC(x,u,t)\ge 0 CBC(x,u,t)≥0
综上,可以得到CLF-CBF-QP为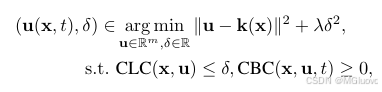
以上为关于CLF和CBF基础知识,只做简单的介绍
三、问题描述
1.智能体和障碍物的描述
智能体: B ( x ) = A ( x ) B 0 ( x ) + b ( x ) B(x) = A(x)B_0(x)+b(x) B(x)=A(x)B0(x)+b(x)
障碍物: O ( t ) = A O ( t ) O 0 + b O ( t ) O(t)=A_O(t)O_0+b_O(t) O(t)=AO(t)O0+bO(t)
先介绍SDF,SDF d表示从一个点q到边界 ∂ S \partial S ∂S的最小距离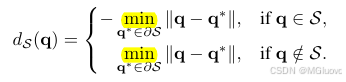
则智能体的SDF表示为
描述B(x)和O(t)在实验中可以用tf变换完成,而SDF通过雷达扫描获得,若根据雷达发射的激光束数量,会采集到相应数量的SDF,求一次min即可得到最近的SDF。
四、Distributionally Robust Safe Control
在本文中假设相对度为1,则CBC可以重写为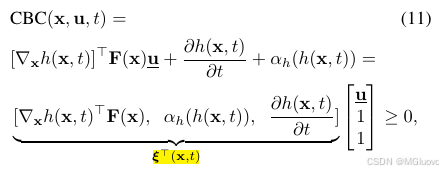
- 建立 ξ \xi ξ的意义在于 ξ \xi ξ中的变量都可以通过动捕和雷达获得到的数据进行计算,但由于本文中假设了这两者都存在误差,所以无法得到准确的 ξ \xi ξ情况下,如何保证实时安全性,这个问题就是本文最核心的问题
1. 为了处理不确定性,第一步先介绍机会约束
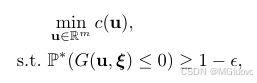
其中 ϵ \epsilon ϵ为容忍度,其将原来的CBC转换为了一个概率约束,意思是保证该安全约束满足的概率大于等于 1 − ϵ 1-\epsilon 1−ϵ
但这样一个约束还是无法直接求解,所以需要再引入VaR和CVaR的概念进一步转换
V a R 1 − ϵ P ( Q ) : = i n f { s ∣ P ( Q ≤ s ) ≥ 1 − ϵ } VaR_{1-\epsilon}^P(Q):=inf\{s\ |\ P(Q\le s)\ge 1-\epsilon \} VaR1−ϵP(Q):=inf{s ∣ P(Q≤s)≥1−ϵ}
C V a R 1 − ϵ P ( Q ) = E P [ Q ∣ Q ≥ V a R 1 − ϵ P ( Q ) ] CVaR_{1-\epsilon}^P(Q)=E_P[Q\ |\ Q\ge VaR_{1-\epsilon}^P(Q)] CVaR1−ϵP(Q)=EP[Q ∣ Q≥VaR1−ϵP(Q)]
VaR(Value-at-Risk)是一个给定置信度下的最大可能损失值,而CVaR则表示超过这个损失值的期望损失,而原来的机会约束可以等价为
进一步的,该约束可以转换为凸约束
其中,参数 s ∈ R s\in\mathbb{R} s∈R。这里可能疑惑的点在于为什么这个约束变成了凸约束,因为这里不再是相对于控制输入u而言,而是对于整个CBC约束 G ( u , ξ ) G(u,\xi) G(u,ξ)而言。
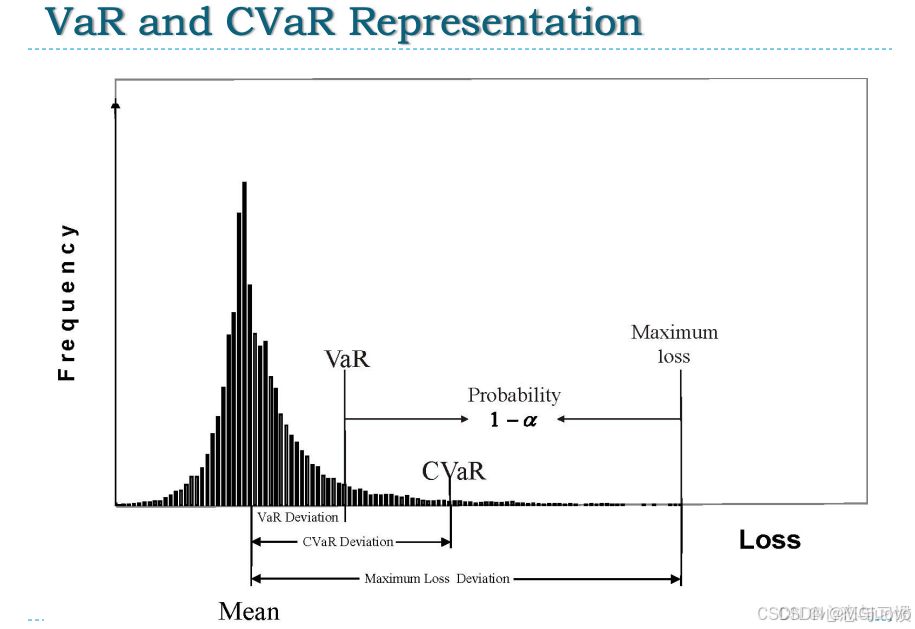
为了方便理解VaR和CVaR,这里给出一张示意图(/robert_chen1988/article/details/85234904)。但不理解也没关系,你只需要知道经过这一系列转换后,原来无法处理的带不确定性的约束变为了一个凸约束,但整个转换过程还没结束,因为你不知道该CBC的具体真实分布P,所以还需要继续想办法如何通过雷达采样得到的 { ξ i } \{\xi_i\} {ξi}模拟出真是分布P
在这之后又是引入了一系列概念来解决这样一个问题,由于我也只是懂他想干啥,但对其中的知识点不了解,所以我就不具体讲了,抽象过程可以用下图表示,即用雷达采样得到的定义为经验集,其在wasserstein ambiguity set映射为a点,而真实分布在wasserstein ambiguity set中的映射被包含在了半径为r的求内,因此只要算出半径r,即可得到真实分布和采样之间的关系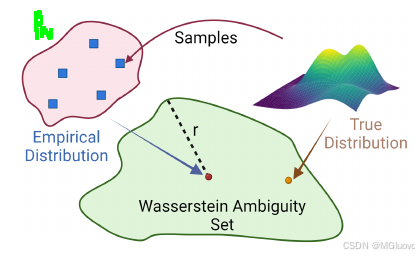
综上,经过上述复杂的转换过程,我们可以下图表示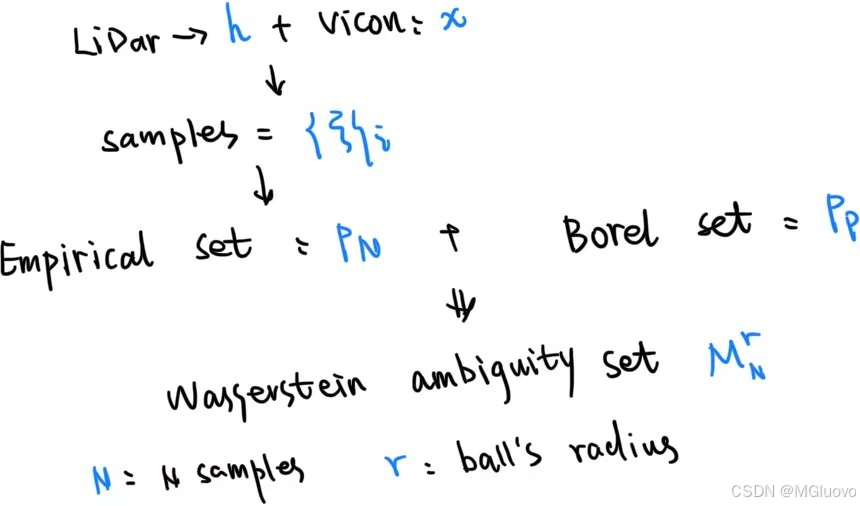
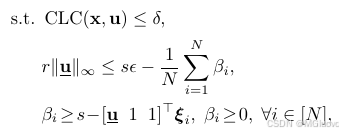
最后,CBC被转换为了如下所示约束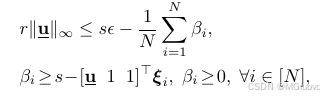
其中, β i ∈ R \beta_i\in \mathbb{R} βi∈R和s都是优化变量,因此总的优化变量为五维(u2, δ \delta δ 1, β \beta β 1,s1), ϵ \epsilon ϵ为容忍度,N为雷达的采样数, ∣ ∣ u ∣ ∣ ∞ ||u||_{\infin} ∣∣u∣∣∞表示无穷范数。
总结
至此,CBC彻底完成了转换,转换后的QP即被叫做Distributionally Robust Optimization,并且在仿真中构建的也是上述约束。
2.在有了控制器后,问题变为如何确定参考控制器
可以看到在上面的QP中需要一个局部参考输入,并且我们只是得到了一个QP去求解控制输入,但在这过程中路标点如何得到,我们应该往哪走并没有说明,所以接下来就是解决这个问题。
简单的,论文直接使用A*生成参考轨迹,但参考轨迹无法直接使用,我们需要在每一个δt告诉QP路标点在哪,参考输入是啥,这里论文引入了reference governor control techniques。考虑一个标量 g ( t ) ∈ [ 0 , 1 ] g(t)\in [0,1] g(t)∈[0,1]满足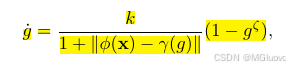
其中,k为标量参数, ζ \zeta ζ保证g渐进靠近1但永不到达。该设计使得参考点 γ(g) 沿着路径 γ 移动,其速度与当前机器人位置 ϕ(x) 和 γ(g) 之间的距离成反比,从而促进响应路径跟随行为。初始条件设置为g(0)=0对应参考轨迹初始点 γ ( 0 ) \gamma(0) γ(0)
在仿真中,为了方便,其参考输入直接用了上一个时刻的参考输入,初始参考输入为0。但也可以设计一个简单的P控制器或者其他方法根据距离差生成一个参考输入都行。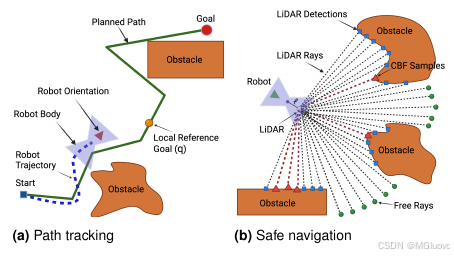
五、针对差动车的设计实例
动力学如下: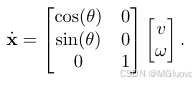
1.设计CLF保证reference governor control可以稳定到达目标路标点

2.用SDF设计CBF

问题在于,雷达采集到的SDF很多,我们不可能都用来构建约束,这样会导致效率极低,因此这里会对整个采集到的SDF做一次排序,只取最小的五个SDF作为CBF使用,即只考虑当前状态下最紧急需要避障的状态。而排序标准则计算下式: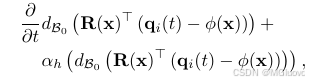
该式考虑了在当前时刻下的 ∂ h / ∂ x \partial{h}/\partial x ∂h/∂x影响,并选取了变换率最小的五个SDF作为CBF。
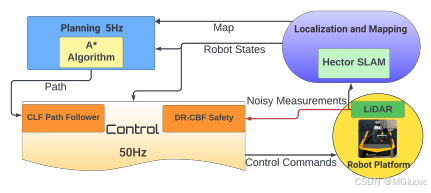
六、代码框架讲解
最后主要讲下动态环境下其开源代码的运行逻辑,若您对该工程感兴趣,则可以根据讲解快速入手。当然由于本人才疏学浅,可能讲的也有错的地方,请谨慎分辨。
1.加载世界
该世界中包含了静态障碍物和动态障碍物,动态障碍物用的是actor,并在world文件中设定了各自的速度和运动方式。
2.设置坐标系和tf变换
对齐map坐标系和odom坐标系,并添加odom到base_link的tf变换
<node pkg="gazebo_p3d_utils" type="p3d_link_tf" name="link_odom_to_base_link" output="log">
<remap from="~input" to="$(arg gazebo_odom_topic)"/>
<param name="parent_frame_id" value="odom"/>
<!-- child frame is base_link setup in jackal.gazebo -->
</node>
<node pkg="tf2_ros" type="static_transform_publisher" name="map_odom_transformer"
args="0 0 0 0 0 0 1 map odom"/>
3.加载jackal机器人和Hector雷达
<!-- Spawn Jackal -->
<include file="$(find jackal_gazebo)/launch/spawn_jackal.launch">
<arg name="x" value="$(arg x)" />
<arg name="y" value="$(arg y)" />
<arg name="z" value="$(arg z)" />
<arg name="yaw" value="$(arg yaw)" />
<arg name="config" value="front_laser" />
<arg name="joystick" value="true" />
<arg name="keyboard" default="false" />
<arg name="enable_ekf" default="false" />
</include>
<!-- slam hector as mapping and localization does not use external odom-->
<include file="$(find jackal_gazebo)/launch/jackal_hector_map.launch">
<arg name="scan_topic" value="$(arg scan_topic)" />
<arg name="map_size" value="255" />
<arg name="map_resolution" value="0.1" />
<arg name="map_frame" value="$(arg map_frame)" />
<arg name="map_start_x" value="0.5"/>
<arg name="map_start_y" value="0.5"/>
<arg name="map_pub_period" value="0.02"/>
</include>
4.加载A*算法节点
输入目标位置/move_base_simple/goal和当前位置/gazebo_p3d/odom,返回计算得到的参考路径\path
<node name="erl_astar_ros" pkg="erl_astar_ros" type="erl_astar_2d_online_node" output="log" launch-prefix="">
<param name="inflation_value" value="0.25"/>
<param name="planning_frame" value="$(arg map_frame)" />
<param name="plan_freq" value="40.0"/>
<param name="odom_topic" value="$(arg ctrl_odom_topic)"/>
<param name="path_topic" value="/path"/>
<param name="map_topic" value="/map"/>
<param name="goal_topic" value="/move_base_simple/goal"/>
</node>
5.加载reference governor节点
输入由A*生成\path,输出一系列路标点/ref_gvn_lite/local_goal
<!--- Run reference governor(output desired robot states) -->
<node pkg="ref_gvn_lite" type="ref_gvn_lite_node.py" name="ref_gvn_lite" output="log">
<param name="display_nav_path" value="true"/>
<param name="odom_topic" value="$(arg ctrl_odom_topic)"/>
<param name="path_topic" value="/path"/>
<param name="radius_topic" value="/sdf_val"/>
<param name="gvn_restart_topic" value="/gvn_restart"/>
<param name="ctrl_freq" value="50.0"/>
<param name="kg" value="2.0"/>
</node>
6.加载控制器节点
设置移动障碍物的速度和角速度限制,加载局部控制器节点(即CLF-DR-CBF)
具体QP的构建和求解可在clf_cbf_drccp_dynamic_controller中见
<node pkg="erl_clf_cbf_controller" type="clf_cbf_controller_node.py" name="clf_cbf_controller" output="log">
<param name="odom_topic" value="$(arg ctrl_odom_topic)"/>
<param name="path_topic" value="/path"/>
<param name="goal_topic" value="/ref_gvn_lite/local_goal"/>
<param name="ctrl_freq" value="50.0"/>
7.启动rviz仿真
<!--- Run rviz using config inside package -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find erl_clf_cbf_controller)/rviz/test_cone_controller_p3d.rviz" />
<node name="plt_llc" pkg="rqt_multiplot" type="rqt_multiplot" args="--multiplot-config $(find erl_clf_cbf_controller)/rqt_config/clf_cbf_rqt.xml --multiplot-run-all"/>
最后给出rqt_gragh方便读者理解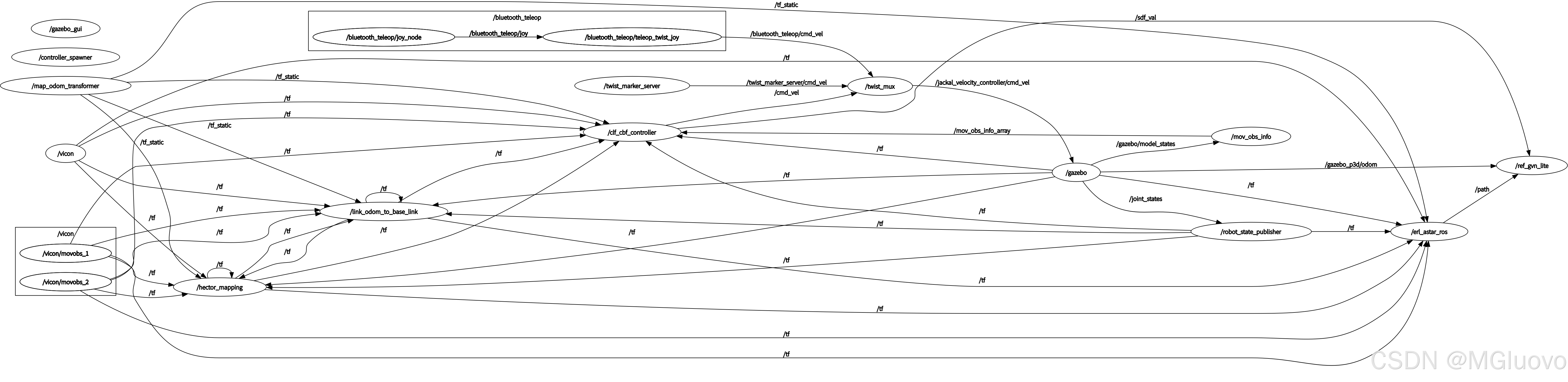

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 8
8 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)