ORCA避障算法梗概
速度障碍是一种几何概念,用于描述两个智能体发生碰撞的所有相对速度集合。对于智能体 A 和智能体 B,以智能体 A 为参考系,智能体 B 的速度障碍区域是一个锥体,锥体的顶点在智能体 A 的位置,锥体的两条边与智能体 B 的边界相切。如果智能体 A 的相对速度落入这个锥体内,那么两个智能体将会发生碰撞。易得以最优速度垂直的外半平面都是可行解,因为任意一个点的向量在u方向上的投影都大于或者等于u。高中
·
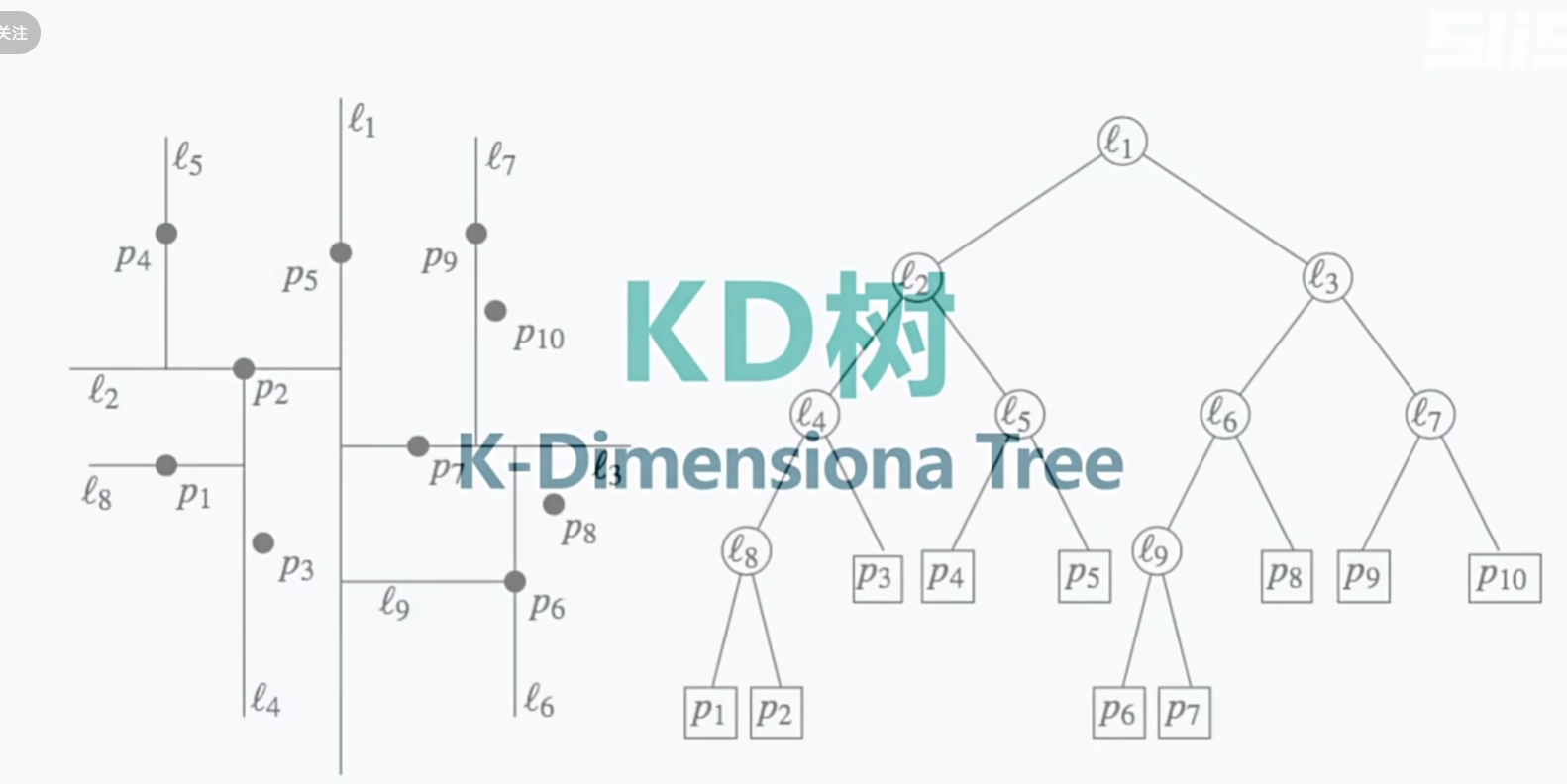
图片来自Sli97
1.速度障碍(Velocity Obstacle)
速度障碍是一种几何概念,用于描述两个智能体发生碰撞的所有相对速度集合。对于智能体 A 和智能体 B,以智能体 A 为参考系,智能体 B 的速度障碍区域是一个锥体,锥体的顶点在智能体 A 的位置,锥体的两条边与智能体 B 的边界相切。如果智能体 A 的相对速度落入这个锥体内,那么两个智能体将会发生碰撞。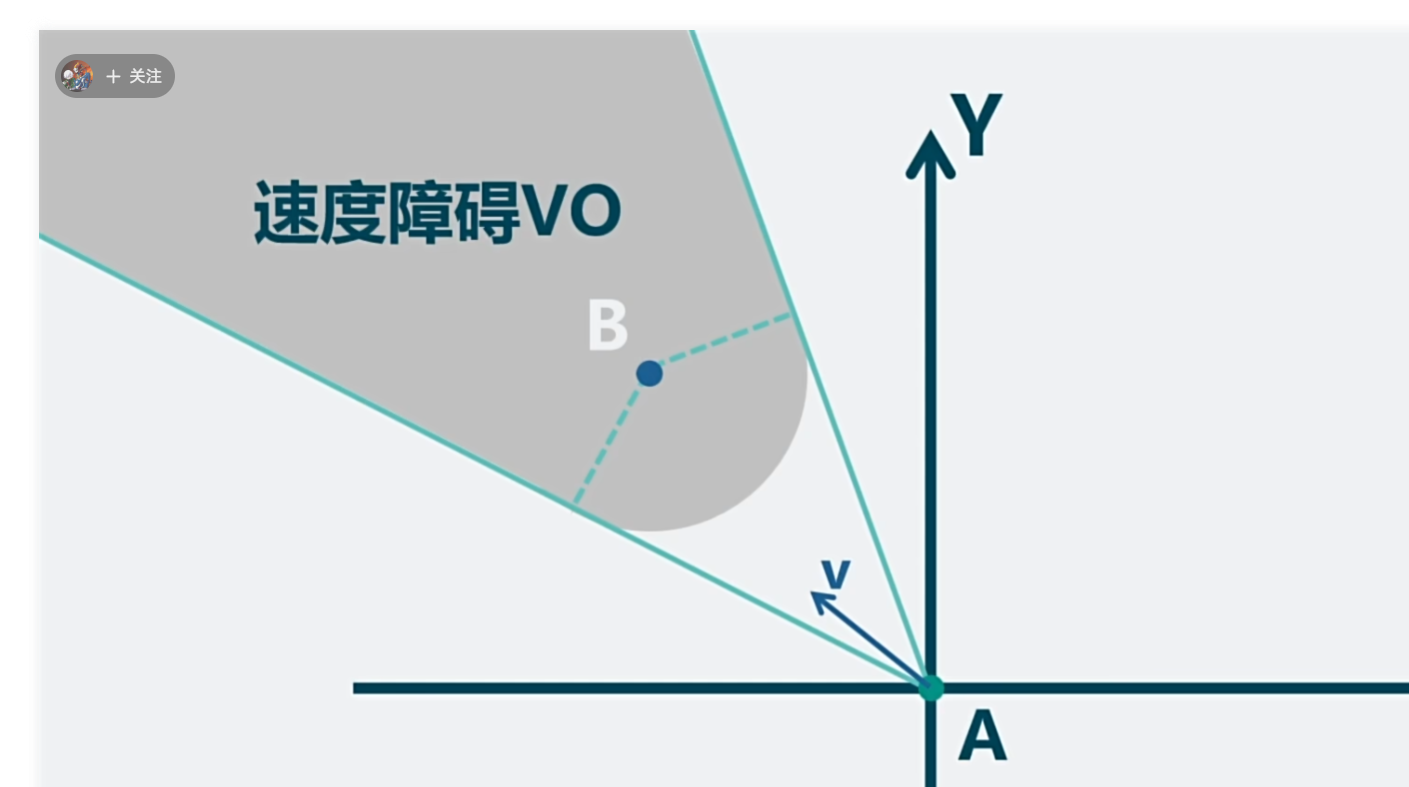
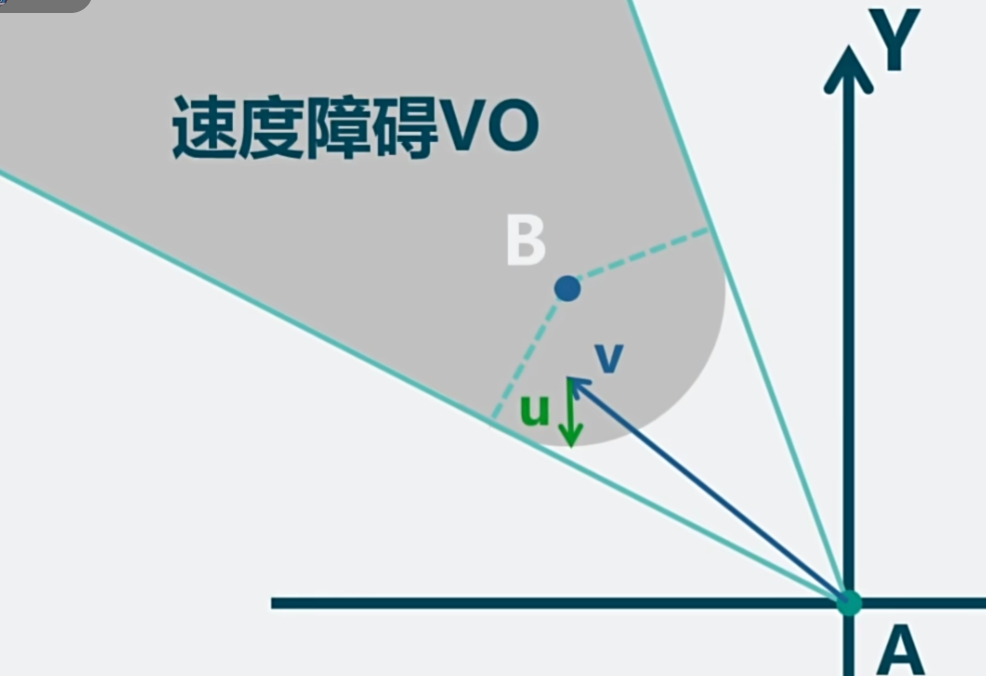
2.最小避障速度u
3.可行避障解
易得以最优速度垂直的外半平面都是可行解,因为任意一个点的向量在u方向上的投影都大于或者等于u。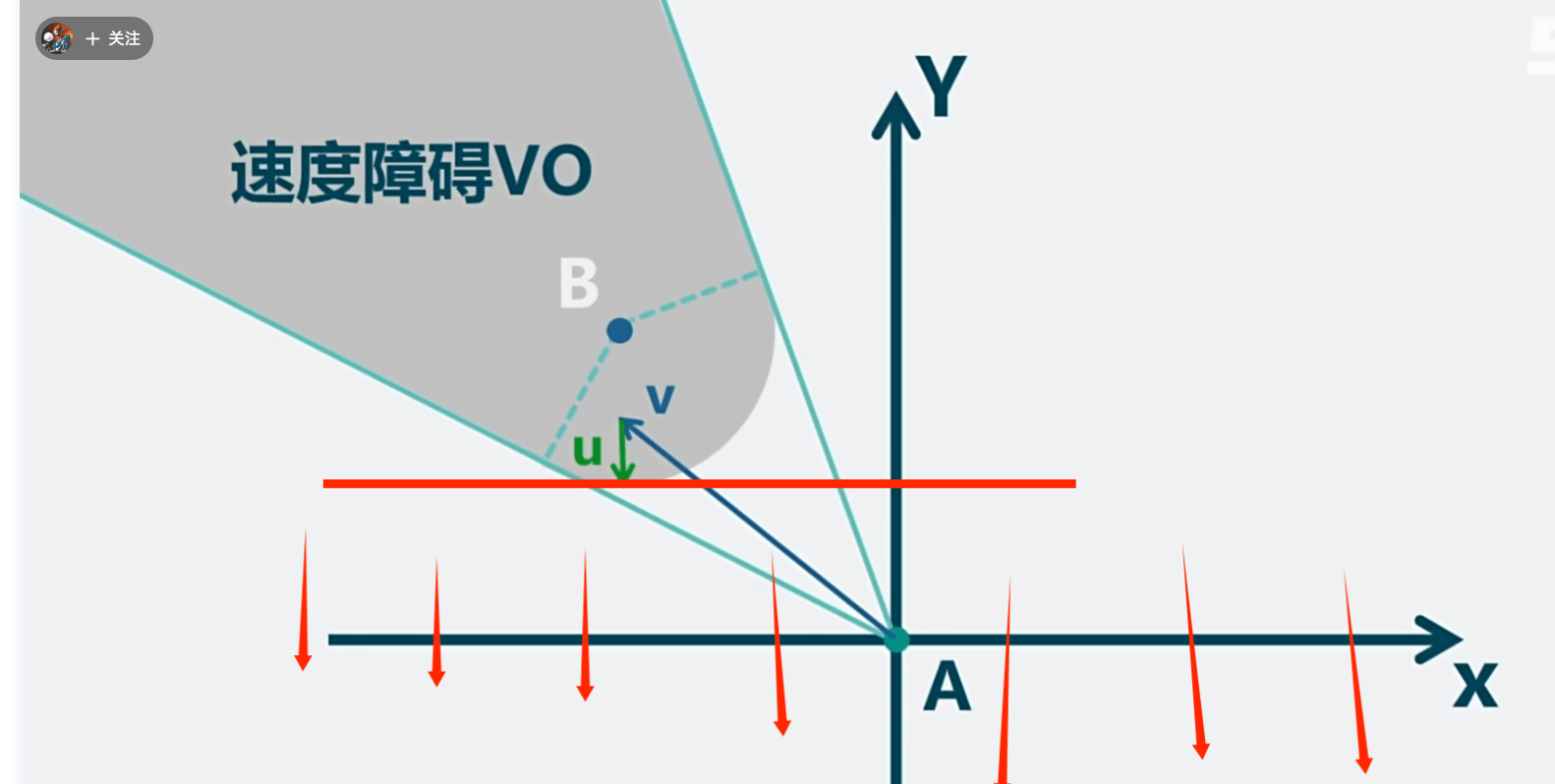
4.多单位情况
高中线性规划,在可行解集中找到一个最优速度解。若无解则会采取后退避让。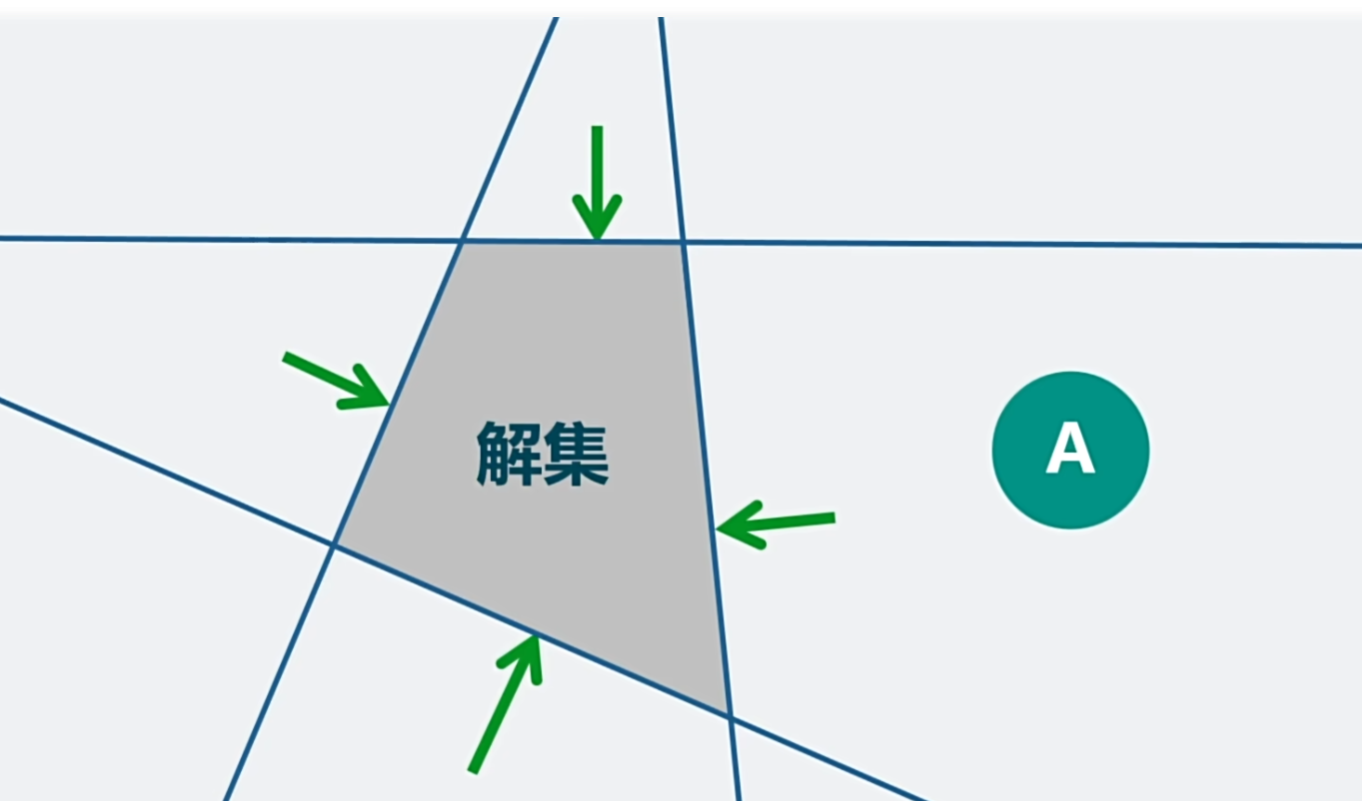
5.多单位优化
自行了解。

中国智能体开发者社区,聚焦智能体与大模型开发,提供前沿资讯、实用工具链、开源项目及行业案例。通过技术沙龙、开发者大赛等活动,促进经验交流与协作,助力开发者快速构建创新智能应用。
更多推荐
 2
2 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)