顶会ICRA双臂赛事“真实场景”大考,顶尖团队破解生命实验操作难题!
5月23日,全球机器人顶会ICRA 2025在美国亚特兰大同期举办 WBCD 双臂机器人挑战赛决赛。WBCD 发起人、谷歌 DeepMind 研究员许倬老师莅临现场解说,与生命科学实验挑战赛负责人、Robotics and AI Institute(RAI)研究员孙凌峰现场支持本次赛事。

5月23日,全球机器人顶会ICRA 2025在美国亚特兰大同期举办 WBCD 双臂机器人挑战赛决赛。WBCD 发起人、谷歌 DeepMind 研究员许倬老师莅临现场解说,与生命科学实验挑战赛负责人、Robotics and AI Institute(RAI)研究员孙凌峰现场支持本次赛事。
顶会ICRA 2025 赛事现场神仙打架?谁更胜一筹
其中来自洛桑联邦理工学院团队与深圳跨维智能团队并列获得冠军、美国西北大学获得季军、艾欧智能团队获得最佳应用奖、加州大学伯克利团队获得最佳效率实践奖,恭喜以上团队!
获奖方案解读
WBCD以"真实场景验证"为核心定位,从机器人公司的实际需求出发,设置三大前沿赛题,重点关注双臂机器人自主感知、预测规划与精细操纵等落地性能。
其中生命挑战赛要求使用松灵 CobotMagic 平台执行模拟科学实验操作,包括安装硅胶柱、操作透明试管等,测试机器人在精细操作和复杂任务协调方面的能力。

1.自研线控遥操作
洛桑联邦理工大学采用自研线控遥操作系统,通过Master-Slave架构实现高精度双向力反馈,结合多视角视觉引导,在无深度信息条件下精准完成硅胶柱螺纹对接与试管操作,展现硬件设计与控制算法的深度协同。
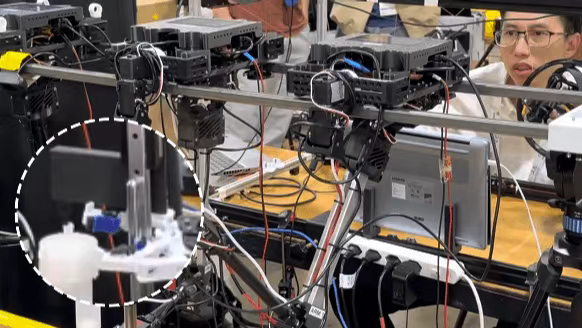
使用自研线控系统进行对孔
2.仿真VA+算法方案
跨维智能团队使用Real2Sim2Real VA+算法分层控制方案,基于自研仿真引擎DexSim生成大规模透明物体操作数据,结合多模态感知训练,实现机器人对复杂光照、透明材质的自适应操作。
Real2Sim2Real VA+算法分层控制方案
3.混合式操作策略
美国西北大学创新采用混合式操作策略,依托松灵机器人Pika数据采集夹爪,在遥操作与自主算法间无缝切换,率先实现“人机协同”动态任务分配,为生命科学场景提供灵活解决方案。
夹爪遥操对孔旋转固定
4.VR跨国遥操
基于自研TeleXperience跨域遥操作平台,完成深圳-亚特兰大超低延时跨洋控制,配合通用控制器实现复杂实验流程的远程精准执行,为实验室协作提供技术范本。

跨国远程遥操机械臂
以“脚踏板分层控制”为核心,通过GELLO+Phantom组合,将大范围移动与精细操作解耦,结合触觉反馈优化操作效率,实现遥操操作。

GELLO+Phantom组合遥操
松灵机器人祝贺所有获奖团队!EPFL的硬件创新、跨维智能的仿真赋能、美国西北大学的混合策略等方案,不仅展现了双臂机器人在生命科学领域的巨大潜力,更印证了“真实场景驱动”技术路线的可行性。我们期待这些方案加速走向制药、生物工程等产业一线,助力全球具身智能科研。

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 6
6 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)