DeepSeek控制Unity中的Panda仿真机械臂
最近小改了一下项目,可以让DeepSeek控制Unity中的Panda仿真机械臂,顺便记录一下过程.
·
前言
最近小改了一下项目,可以让DeepSeek控制Unity中的Panda仿真机械臂,顺便记录一下过程。后续给DeepSeek加上“眼睛”,让其能识别到仿真环境中的物体。
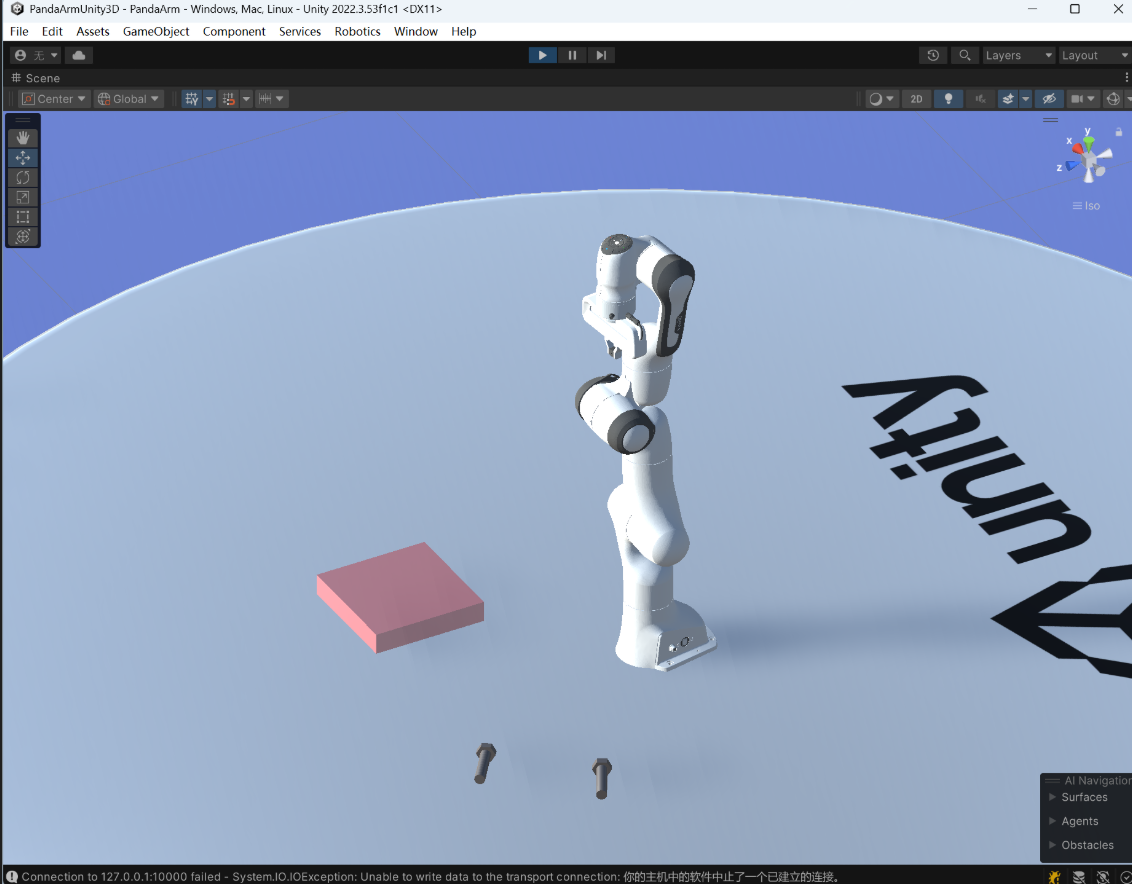
运行效果
节点图
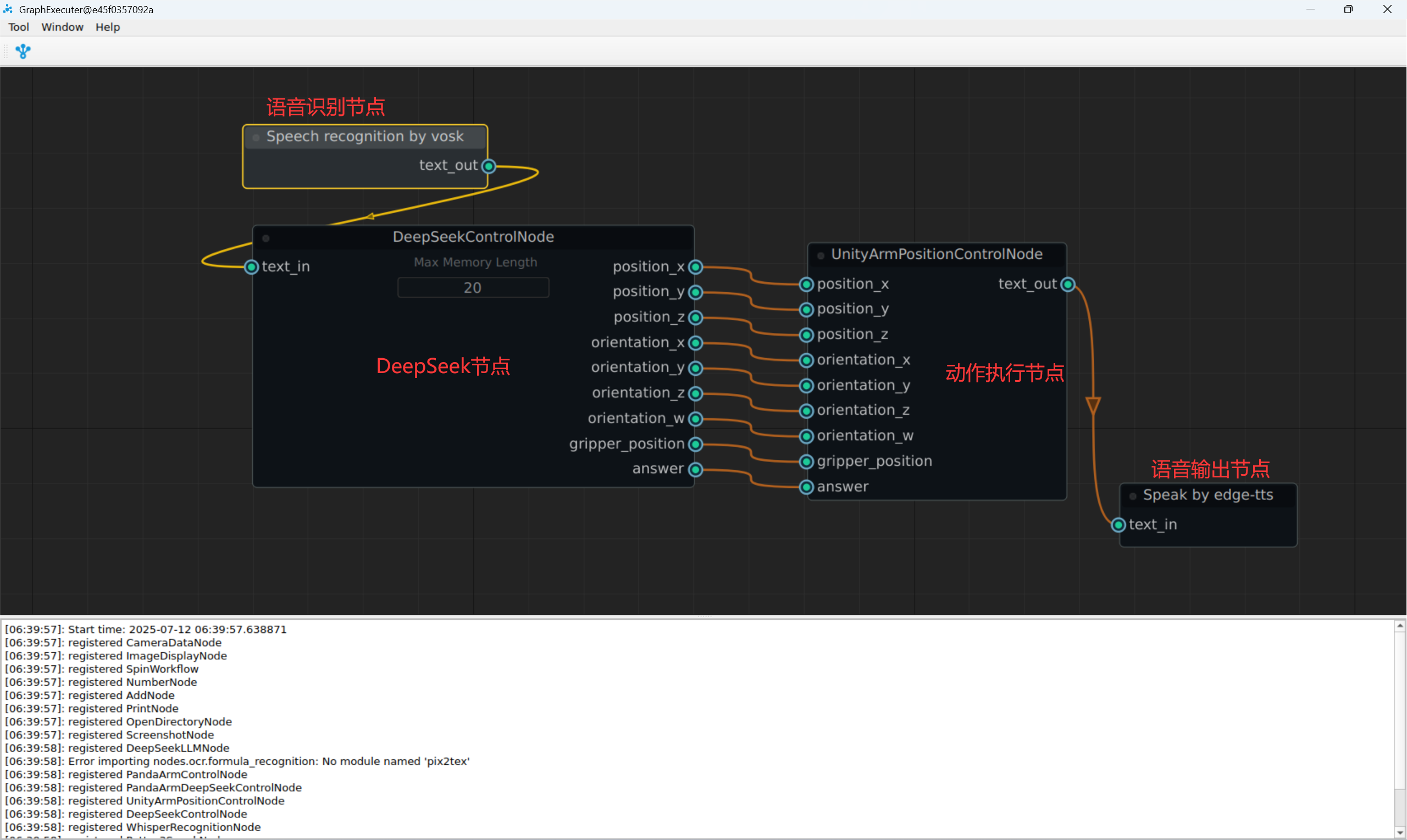
- 语音识别节点:使用vosk语音识别,将语音转换为文字
- DeepSeek节点:使用DeepSeek进行对话,并返回目标位置
- 动作执行节点:将DeepSeek返回的目标位置转换为Unity中的动作,并执行
- 语音输出节点:使用edge-tts语音合成,将文字转换为语音
环境配置
参考开源项目的环境配置文件
运行测试
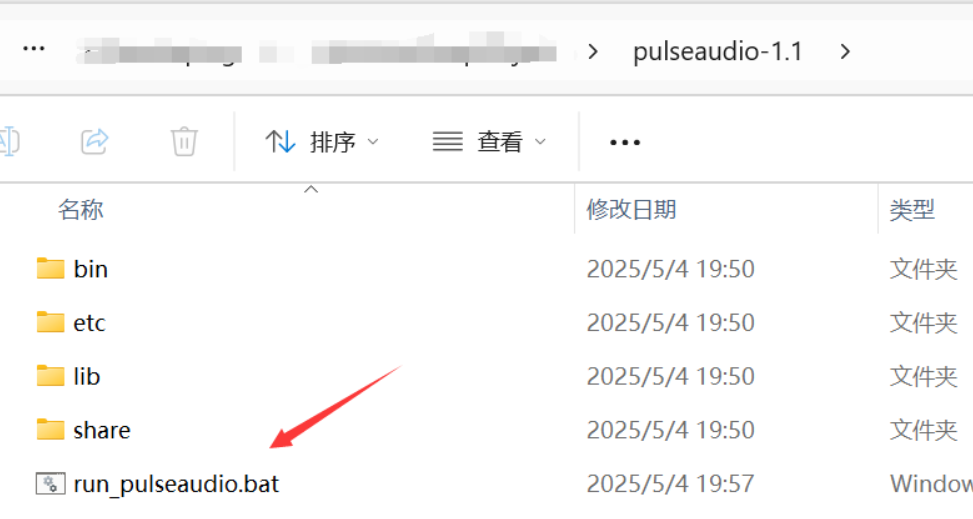
❇️在windows上双击运行PulseAudio服务
❇️启动Unity项目
❇️编译项目
colcon build
❇️启动tcp,用于ros2与unity连接
source install/setup.bash
ros2 launch ros_tcp_endpoint endpoint.launch.py
❇️运行moveitpy_controller
# 打开新的终端
source install/setup.bash
ros2 launch control_server arm_control.launch.py
❇️运行panda_moveit_config的demo.launch.py
# 打开新的终端
source install/setup.bash
ros2 launch panda_moveit_config demo.launch.py
❇️运行graph_executer_controller
# 打开新的终端
source install/setup.bash
cd src/GraphExecuter/graph_executer
python3 main.py

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 10
10 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)