【OpenCV】Python图像处理之常用算子
本文介绍了OpenCV中常用的图像处理算子及其Python实现方法。主要内容包括:边缘检测算子(Sobel、Laplacian、Canny)用于提取图像轮廓;滤波算子(高斯、中值、均值、双边)用于去噪和图像增强;形态学算子(腐蚀、膨胀、开闭运算)用于二值图像处理;以及特征检测算子(Harris、Shi-Tomasi)用于角点检测。文章还提供了算子选择建议,强调应根据任务需求组合使用不同算子,如先滤
·
OpenCV 中的常用算子主要用于图像的特征提取、边缘检测、滤波增强等核心操作,是图像处理的基础工具。以下按功能分类介绍常用算子及其 Python 实现:
一、边缘检测算子
边缘检测算子通过计算像素梯度变化识别图像边缘,常见的有:
1. Sobel 算子
- 原理:基于一阶导数,分别计算水平(
x方向)和垂直(y方向)边缘,对噪声有一定抑制。 - 应用:检测明显的边缘轮廓。
import cv2
import numpy as np
image = cv2.imread('image.jpg', 0) # 灰度读取
# Sobel算子:dx=1检测垂直边缘,dy=1检测水平边缘,ksize为卷积核大小
sobel_x = cv2.Sobel(image, cv2.CV_64F, dx=1, dy=0, ksize=3)
sobel_y = cv2.Sobel(image, cv2.CV_64F, dx=0, dy=1, ksize=3)
# 转换为绝对值并归一化
sobel_x = cv2.convertScaleAbs(sobel_x)
sobel_y = cv2.convertScaleAbs(sobel_y)
# 合并x、y方向边缘
sobel_xy = cv2.addWeighted(sobel_x, 0.5, sobel_y, 0.5, 0)
cv2.imshow('Sobel Edge', sobel_xy)
cv2.waitKey(0)Sobel效果图:
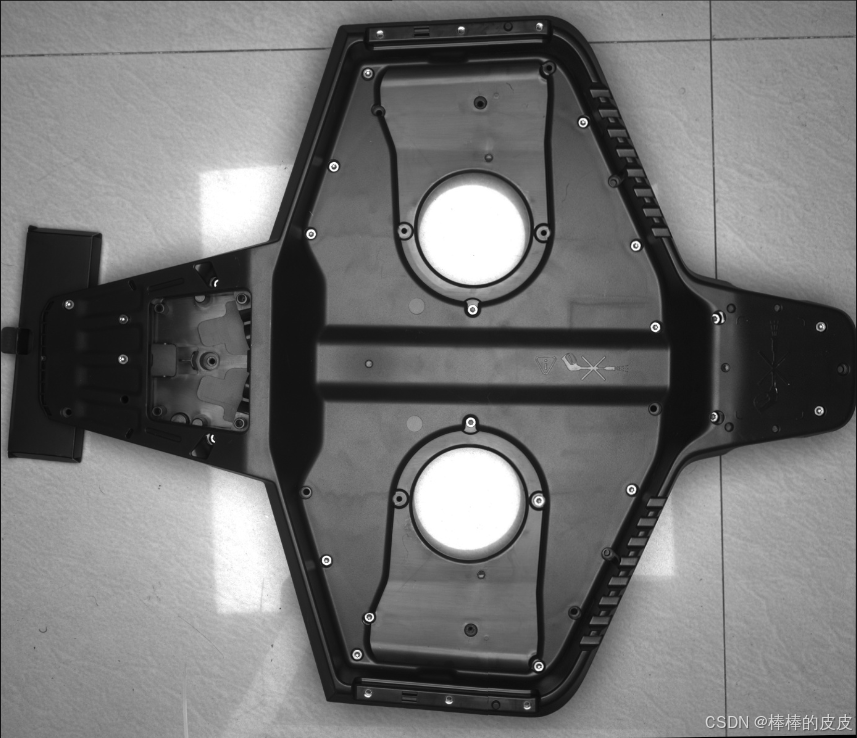 Sobel处理后:
Sobel处理后: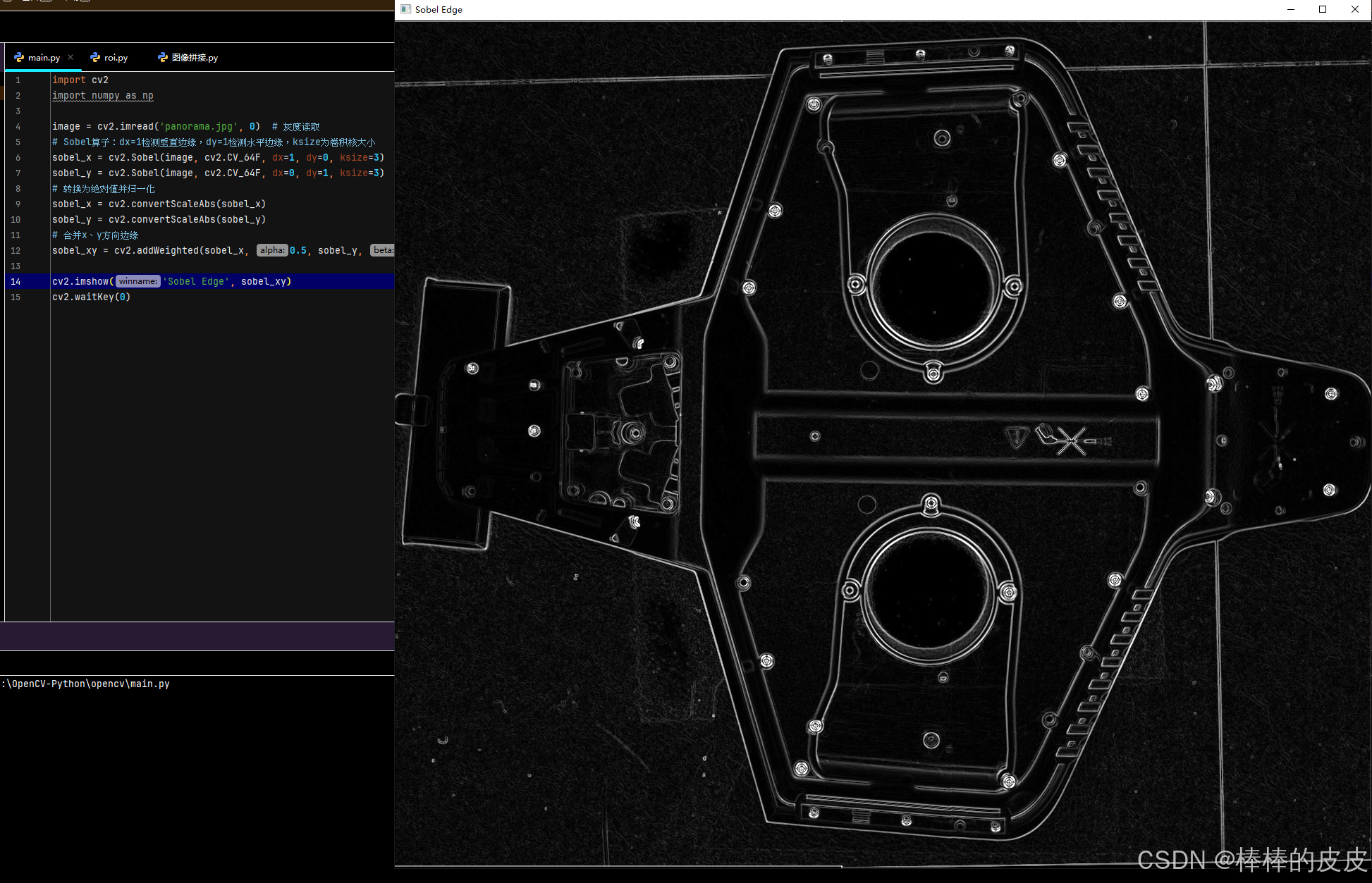
2. Laplacian 算子
- 原理:基于二阶导数,对噪声敏感,常结合高斯滤波使用(LoG 算子)。
- 应用:检测图像中的快速灰度变化区域。
laplacian = cv2.Laplacian(image, cv2.CV_64F, ksize=3)
laplacian = cv2.convertScaleAbs(laplacian)
cv2.imshow('Laplacian Edge', laplacian)
Laplacian 效果图(细节较清晰):
Laplacian处理后: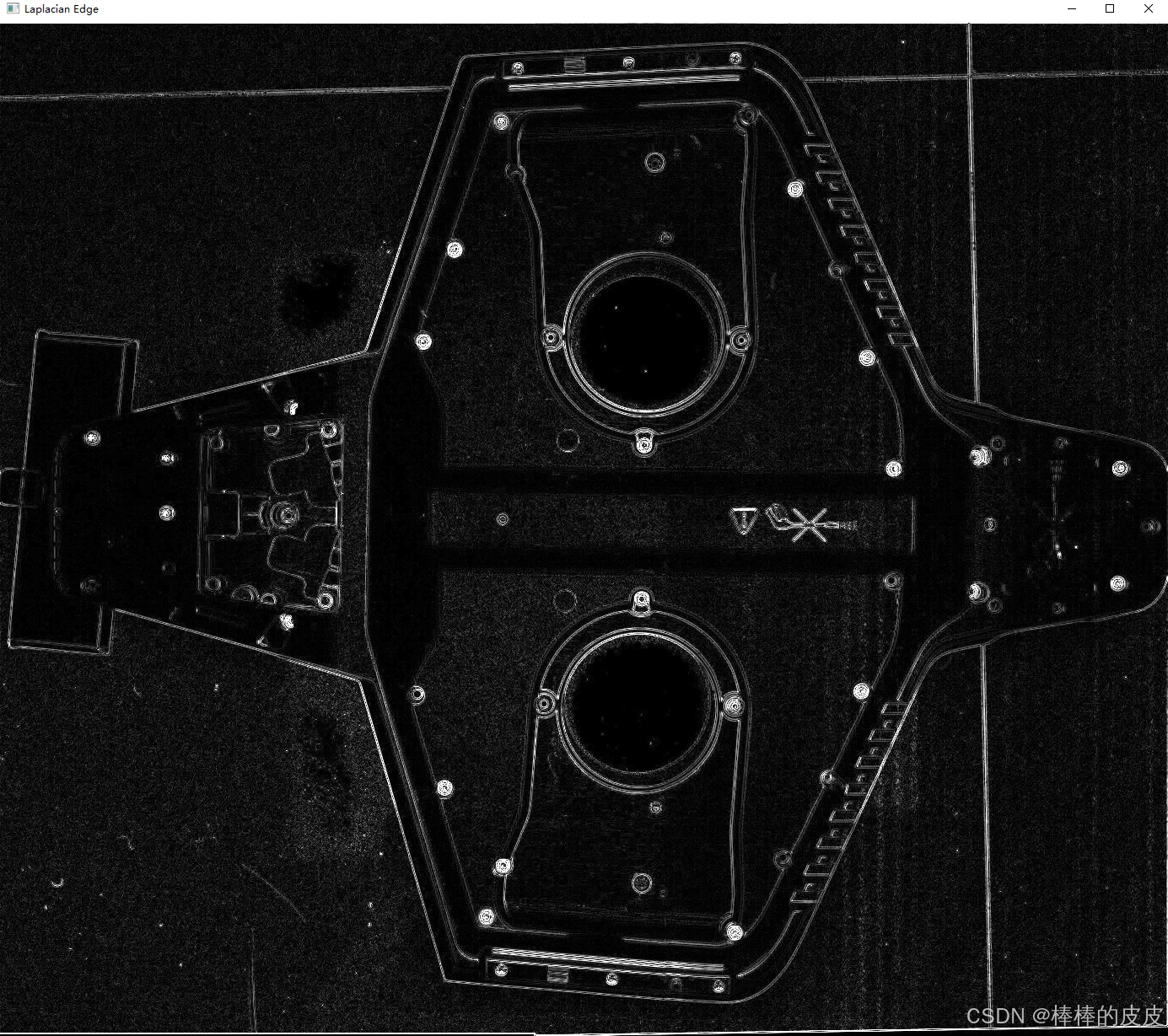
3. Canny 算子
- 原理:多阶段边缘检测(高斯滤波→梯度计算→非极大值抑制→双阈值筛选),边缘检测精度高。
- 应用:高精度边缘提取(如轮廓检测、目标识别)。
canny = cv2.Canny(image, threshold1=50, threshold2=150) # 双阈值
cv2.imshow('Canny Edge', canny)
Canny 效果图(高精度边缘提取):
Canny处理后:
二、滤波算子
滤波算子用于图像去噪、平滑或增强,常见的有:
1. 高斯滤波算子
- 原理:使用高斯核进行卷积,对噪声有良好的平滑效果,保留边缘细节。
- 应用:图像预处理去噪。
gaussian = cv2.GaussianBlur(image, (5, 5), sigmaX=1.5) # (5,5)为核大小,sigmaX为X方向标准差
cv2.imshow('Gaussian Blur', gaussian)
2. 中值滤波算子
- 原理:用邻域像素的中值替代当前像素,对椒盐噪声抑制效果显著。
- 应用:去除椒盐噪声(如相机噪点)。
median = cv2.medianBlur(image, 5) # 核大小为奇数
cv2.imshow('Median Blur', median)
3. 均值滤波算子
- 原理:用邻域像素的平均值替代当前像素,简单但易模糊边缘。
- 应用:轻度去噪或图像模糊化。
average = cv2.blur(image, (5, 5)) # 核大小
cv2.imshow('Average Blur', average)
4. 双边滤波算子
- 原理:结合空间距离和像素相似度的滤波,去噪同时保留边缘。
- 应用:保留边缘的图像美化(如人像磨皮)。
bilateral = cv2.bilateralFilter(image, d=9, sigmaColor=75, sigmaSpace=75)
cv2.imshow('Bilateral Filter', bilateral)
三、形态学算子
形态学算子基于形状对图像进行操作,需结合二值图像使用:
1. 腐蚀(Erosion)
- 原理:收缩图像中的亮区域,消除小的亮噪点。
- 应用:去除小的白色干扰、分离连接的物体。
kernel = np.ones((3, 3), np.uint8) # 结构元素
erosion = cv2.erode(image, kernel, iterations=1) # iterations为迭代次数
cv2.imshow('Erosion', erosion)
2. 膨胀(Dilation)
- 原理:扩张图像中的亮区域,填补小的暗孔洞。
- 应用:修复边缘缺口、连接断裂的区域。
dilation = cv2.dilate(image, kernel, iterations=1)
cv2.imshow('Dilation', dilation)
3. 开运算与闭运算
- 开运算:先腐蚀后膨胀,去除小的亮噪点。
- 闭运算:先膨胀后腐蚀,填补小的暗孔洞。
opening = cv2.morphologyEx(image, cv2.MORPH_OPEN, kernel) # 开运算
closing = cv2.morphologyEx(image, cv2.MORPH_CLOSE, kernel) # 闭运算
4. 形态学梯度
- 原理:膨胀图像与腐蚀图像的差值,提取物体边缘。
gradient = cv2.morphologyEx(image, cv2.MORPH_GRADIENT, kernel)
cv2.imshow('Morphology Gradient', gradient)
四、特征检测算子
1. Harris 角点检测算子
- 原理:检测图像中灰度变化剧烈的角点(如交点、拐角)。
# Harris角点检测
gray = np.float32(image)
harris = cv2.cornerHarris(gray, blockSize=2, ksize=3, k=0.04)
# 标记角点
image[harris > 0.01 * harris.max()] = 255
cv2.imshow('Harris Corners', image)
2. Shi-Tomasi 角点检测算子
- 原理:Harris 算子的改进,更稳定地检测角点。
corners = cv2.goodFeaturesToTrack(image, maxCorners=100, qualityLevel=0.01, minDistance=10)
corners = np.int0(corners)
for corner in corners:
x, y = corner.ravel()
cv2.circle(image, (x, y), 3, 255, -1)
cv2.imshow('Shi-Tomasi Corners', image)
五、算子选择建议
- 边缘检测:优先选 Canny(高精度),Sobel(快速),Laplacian(细节丰富)。
- 去噪:高斯滤波(通用)、中值滤波(椒盐噪声)、双边滤波(保边缘)。
- 形态学操作:腐蚀 / 膨胀(基础形状调整)、开 / 闭运算(噪点 / 孔洞处理)。
- 特征检测:Shi-Tomasi(角点检测)、Harris(简单场景)。
这些算子是 OpenCV 图像处理的核心工具,需根据任务需求组合使用(如先滤波去噪,再边缘检测)。

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 24
24 0
0- 0



 已为社区贡献23条内容
已为社区贡献23条内容

所有评论(0)