在gazebo仿真场景中添加turtolebot3无人车
环境:
ubuntu22.04
ROS2humble
一、在gazebo仿真场景中添加1台turtolebot3无人车
1. 安装 Gazebo 与常用工具
sudo apt update
sudo apt install -y ros-humble-gazebo-* \
ros-humble-rviz2 \
ros-humble-cartographer \
ros-humble-cartographer-ros \
ros-humble-navigation2 \
ros-humble-nav2-bringup \
python3-colcon-common-extensions2 获取 TurtleBot3 仿真源码
2.1 建立工作空间
mkdir -p ~/turtlebot3_ws/src
cd ~/turtlebot3_ws/src2.2 拉官方仓库(humble 分支)
git clone -b humble https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git
git clone -b humble https://github.com/ROBOTIS-GIT/turtlebot3.git
git clone -b humble https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git2.3 编译
cd ~/turtlebot3_ws
colcon build --symlink-install
echo 'source ~/turtlebot3_ws/install/setup.bash' >> ~/.bashrc
source ~/.bashrc3 配置环境变量
把下面 3 行追加到 ~/.bashrc,然后重新打开终端:
export TURTLEBOT3_MODEL=burger # 或 waffle / waffle_pi
export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:~/turtlebot3_ws/install/turtlebot3_gazebo/share/turtlebot3_gazebo/models
source /usr/share/gazebo/setup.sh4 启动第一台 TurtleBot3 仿真
4.1 启动 Gazebo 世界
ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py看到小车和空场地即成功 。
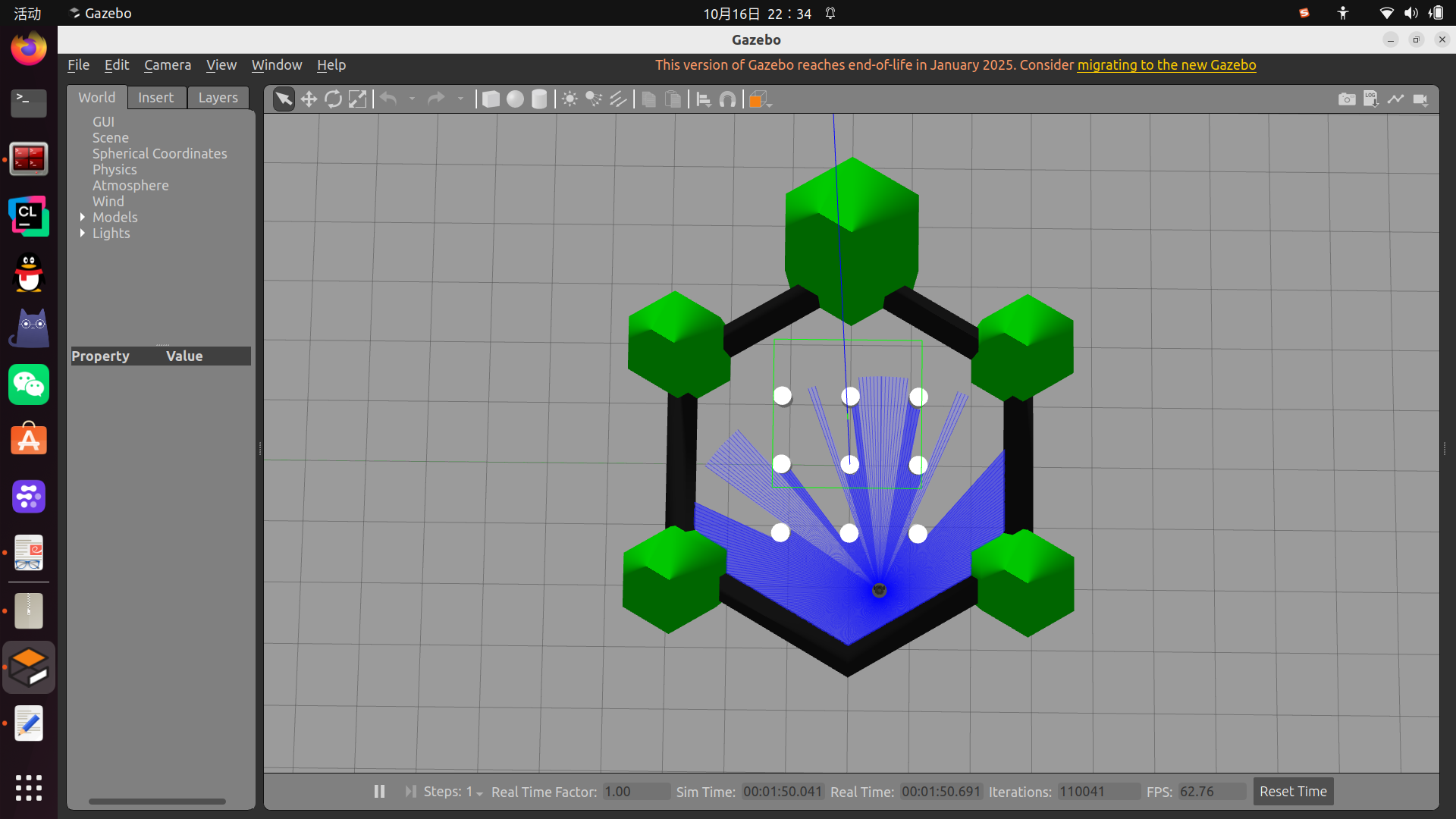
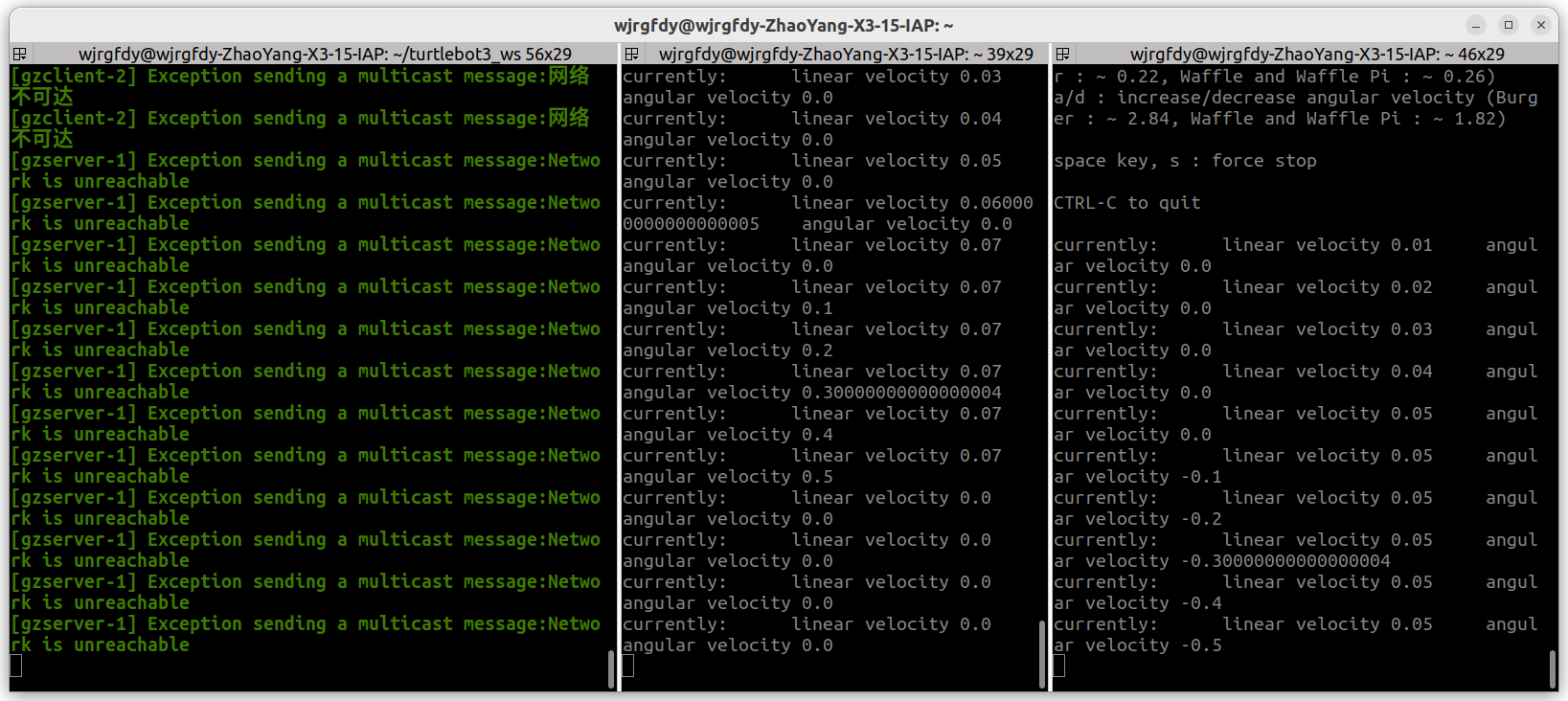
若Gazebo 里没出现小车,99 % 是因为 spawn 环节失败
spawn_entity.py 被 Anaconda 的 Python 3.11 劫持了,而 ROS Humble 的 rclpy 扩展只编译给 系统 Python 3.10,于是找不到 .so → spawn 进程崩 → Gazebo 里只剩空地图。
问题解决(退出 conda 再重跑)
# 1. 退出 conda base
conda deactivate
# 2. 确认用的是系统 3.10
which python3 # 应该 = /usr/bin/python3
# 3. 把刚才残留的 Gazebo 进程杀干净
pkill -f gzserver
pkill -f gzclient
# 4. 重新启动
ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py看到 Successfully spawned entity turtlebot3_burger 就成功了,小车会出现在地图里。
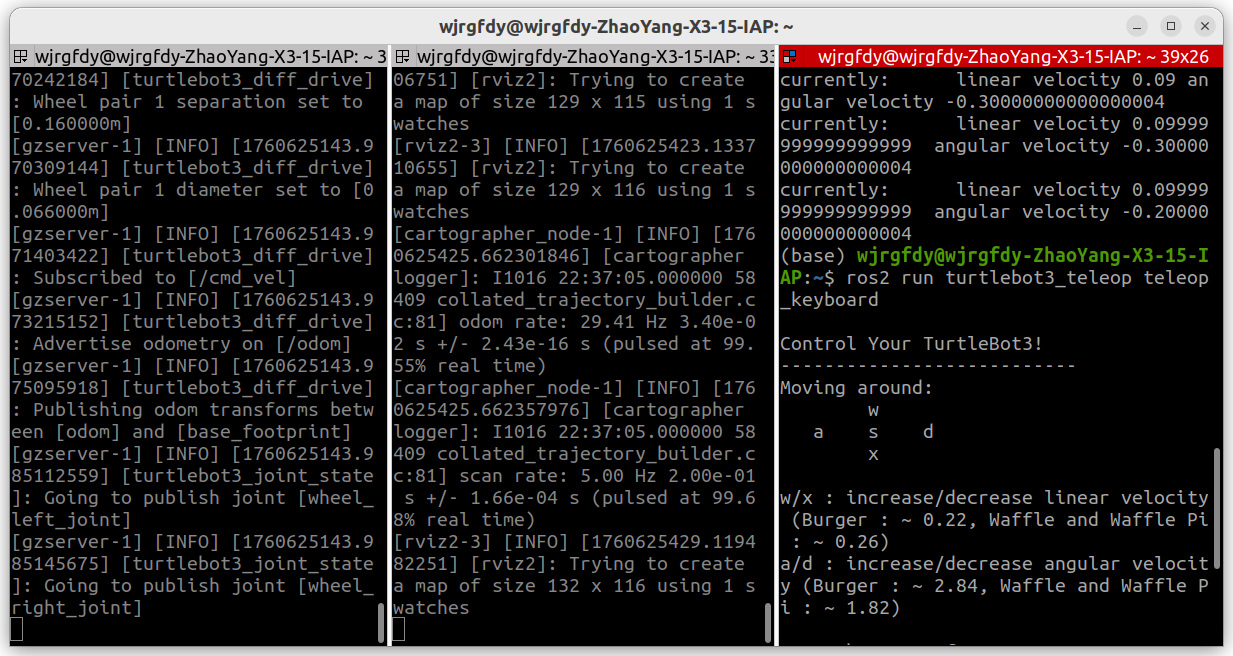
4.2 键盘遥控小车
ros2 run turtlebot3_teleop teleop_keyboard方向键移动,空格急停。
4.3 启动 SLAM
ros2 launch turtlebot3_cartographer cartographer.launch.py use_sim_time:=True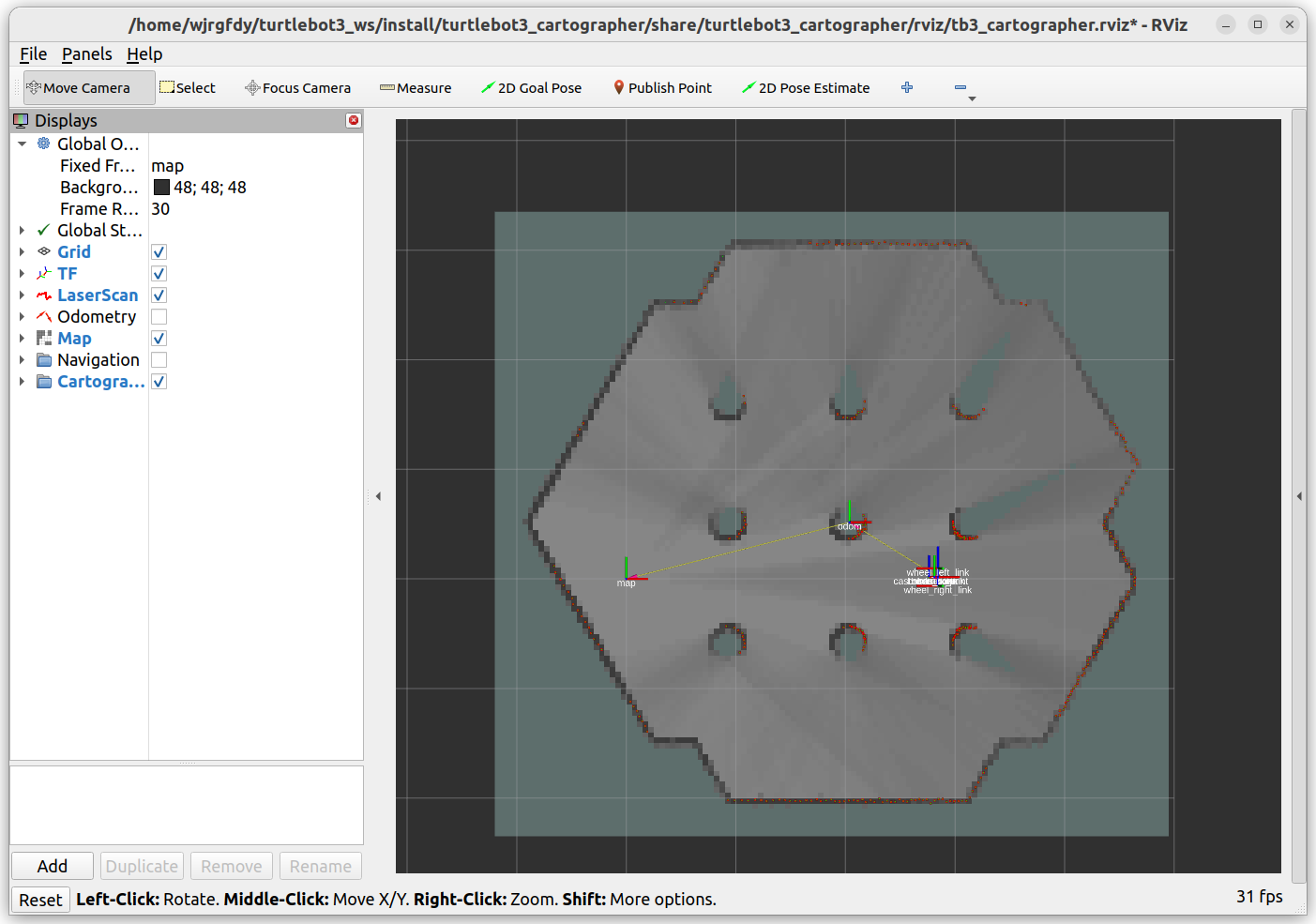
4.4 启动 RViz(可视化模型 + 点云 + 地图)
ros2 launch turtlebot3_bringup rviz2.launch.py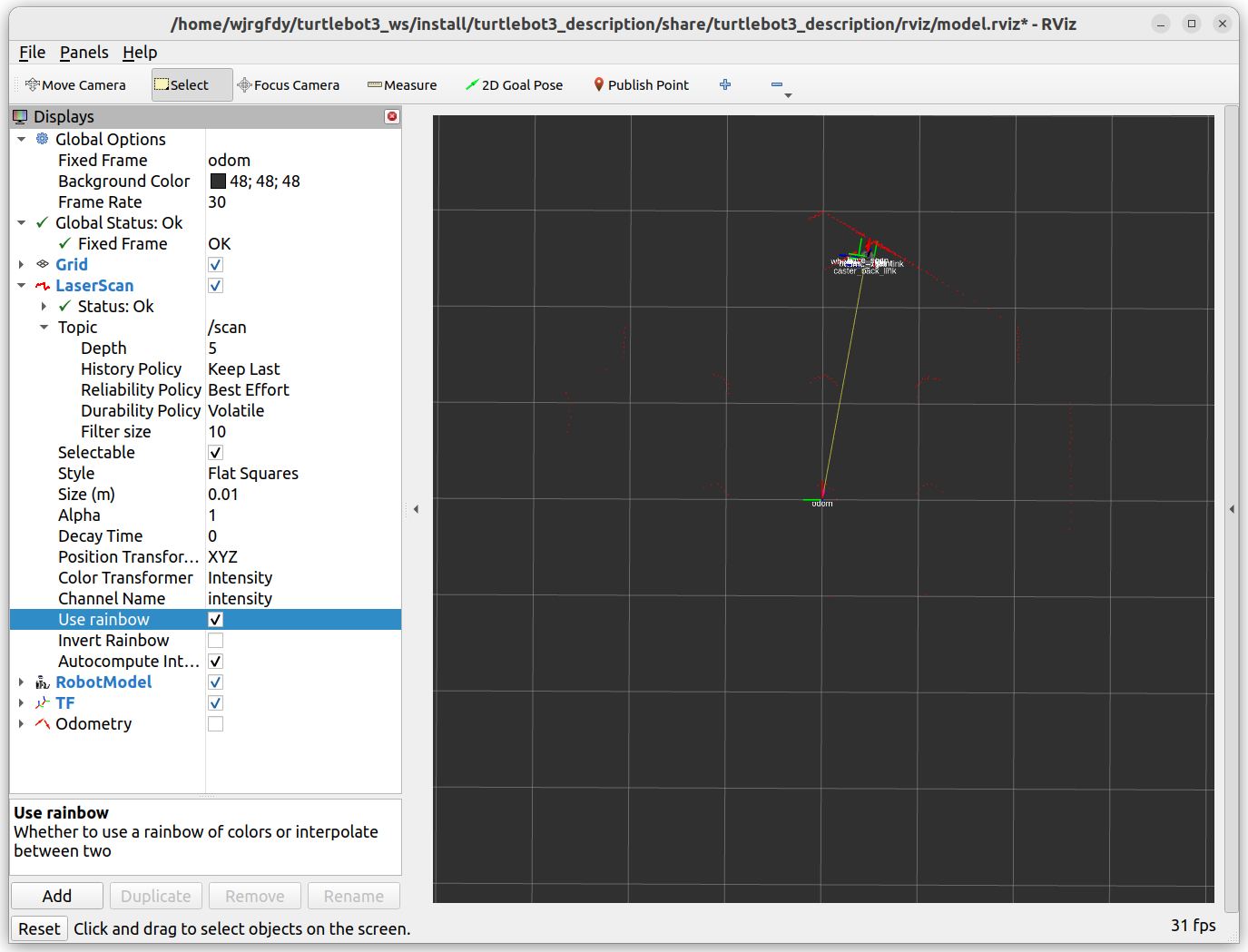
二、在gazebo仿真场景中添加3台turtolebot3无人车(法一)
1 创建功能包
ROS2 里所有节点、launch 文件、参数、脚本……都必须属于某个功能包。
所以我们要先创建一个空的功能包,再把 multi_tb3.launch.py 塞进去。
📁 整体文件架构
你的工作空间(例如:~/turtlebot3_ws/)
├── src/
│ └── my_turtlebot3_sim/ # 你自定义的功能包
│ ├── launch/
│ │ ├── multi_tb3.launch.py # 多机器人启动文件
│ │ └── single_tb3.launch.py # 单机器人启动文件
│ ├── worlds/
│ │ └── my_world.world # 你的Gazebo世界文件
│ ├── config/
│ │ └── rviz/
│ │ └── multi_tb3.rviz # RViz配置文件
│ ├── package.xml
│ └── setup.py
├── build/
├── install/
└── log/1.1 创建空功能包
mkdir -p ~/turtlebot3_ws/src
cd ~/turtlebot3_ws/src
ros2 pkg create my_turtlebot3_sim --build-type ament_python --dependencies rclpy launch gazebo_ros turtlebot3_gazebo1.2 创建launch文件目录和文件
cd my_turtlebot3_sim
mkdir launch
mkdir worlds
mkdir -p config/rviz2 写 launch 文件
2.1 创建launch文件 launch/multi_tb3.launch.py
cd ~/turtlebot3_ws/src/my_turtlebot3_sim/launch
gedit multi_tb3.launch.py2.2 写launch文件
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription, TimerAction
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch_ros.actions import Node
from launch.actions import ExecuteProcess
def generate_launch_description():
os.environ['TURTLEBOT3_MODEL'] = 'burger'
ld = LaunchDescription()
# 使用 gazebo_ros 包启动 Gazebo
gazebo_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource([
get_package_share_directory('gazebo_ros'),
'/launch/gazebo.launch.py'
]),
launch_arguments={
'world': 'worlds/empty.world',
'verbose': 'true'
}.items()
)
ld.add_action(gazebo_launch)
# 机器人配置 - 现在为每个机器人设置命名空间
robots = [
{'name': 'tb3_0', 'x': '0.0', 'y': '0.0', 'z': '0.1', 'namespace': 'tb3_0'},
{'name': 'tb3_1', 'x': '1.5', 'y': '0.0', 'z': '0.1', 'namespace': 'tb3_1'},
{'name': 'tb3_2', 'x': '-1.5', 'y': '0.0', 'z': '0.1', 'namespace': 'tb3_2'}
]
# 延迟生成机器人
for i, robot in enumerate(robots):
spawn_delay = 10.0 + i * 3.0 # 增加间隔时间
spawn_robot = TimerAction(
period=spawn_delay,
actions=[
ExecuteProcess(
cmd=['ros2', 'run', 'gazebo_ros', 'spawn_entity.py',
'-entity', robot['name'],
'-x', robot['x'], '-y', robot['y'], '-z', robot['z'],
'-robot_namespace', robot['namespace'], # 添加命名空间参数
'-file', '/opt/ros/humble/share/turtlebot3_gazebo/models/turtlebot3_burger/model.sdf'],
output='screen'
)
]
)
ld.add_action(spawn_robot)
return ld3 创建世界文件(可选)
3.1 创建 worlds/empty.world 文件
(Gazebo自带的空世界,或者你可以使用自己的世界文件):
cd ~/turtlebot3_ws/src/my_turtlebot3_sim/worlds
gedit empty.world
3.2 写world文件
<?xml version="1.0" ?>
<sdf version="1.6">
<world name="empty">
<include>
<uri>model://ground_plane</uri>
</include>
<include>
<uri>model://sun</uri>
</include>
</world>
</sdf>4. 修改package.xml
确保你的package.xml包含必要的依赖:
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypelocation="http://www.ros.org/schema/package_format3.xsd"?>
<package format="3">
<name>my_turtlebot3_sim</name>
<version>0.0.0</version>
<description>Multi TurtleBot3 simulation package</description>
<maintainer email="you@example.com">Your Name</maintainer>
<license>Apache-2.0</license>
<depend>rclpy</depend>
<depend>launch</depend>
<depend>gazebo_ros</depend>
<depend>turtlebot3_gazebo</depend>
<depend>robot_state_publisher</depend>
<export>
<build_type>ament_python</build_type>
</export>
</package>5 修改setup.py文件
让 ROS2 能找到你的 launch 文件
ROS2 不会自动扫描 launch/ 目录,确保launch文件能被正确安装:
from setuptools import setup
import os
from glob import glob
package_name = 'my_turtlebot3_sim'
setup(
name=package_name,
version='0.0.0',
packages=[package_name],
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
# 安装launch文件
(os.path.join('share', package_name, 'launch'), glob('launch/*.launch.py')),
# 安装世界文件
(os.path.join('share', package_name, 'worlds'), glob('worlds/*.world')),
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='Your Name',
maintainer_email='you@example.com',
description='Multi TurtleBot3 simulation package',
license='Apache-2.0',
tests_require=['pytest'],
entry_points={
'console_scripts': [
],
},
)6. 编译和运行
6.1 编译
cd ~/turtlebot3_ws
colcon build --packages-select my_turtlebot3_sim
source install/setup.bash
6.2 运行多机器人仿真
conda deactivate
pkill -f gzserver
pkill -f gzclient
ros2 launch my_turtlebot3_sim multi_tb3.launch.py7 控制三台机器人
关键概念解释:
-
命名空间:
/tb3_0,/tb3_1,/tb3_2-
话题变成:
/tb3_0/cmd_vel,/tb3_1/cmd_vel等 -
服务也相应隔离
-
-
TF前缀:
tb3_0/,tb3_1/,tb3_2/-
坐标框架:
tb3_0/base_link,tb3_1/base_link等 -
避免TF树中的命名冲突
-
启动仿真后,在三个不同的终端中分别控制:
# 终端1 - 控制tb3_0
ROS_NAMESPACE=tb3_0 ros2 run turtlebot3_teleop teleop_keyboard
# 终端2 - 控制tb3_1
ROS_NAMESPACE=tb3_1 ros2 run turtlebot3_teleop teleop_keyboard
# 终端3 - 控制tb3_2
ROS_NAMESPACE=tb3_2 ros2 run turtlebot3_teleop teleop_keyboard或者
# 控制第一台机器人 (tb3_0)
ros2 run turtlebot3_teleop teleop_keyboard --ros-args -r /cmd_vel:=/tb3_0/cmd_vel
# 控制第二台机器人 (tb3_1) - 新终端
ros2 run turtlebot3_teleop teleop_keyboard --ros-args -r /cmd_vel:=/tb3_1/cmd_vel
# 控制第三台机器人 (tb3_2) - 新终端
ros2 run turtlebot3_teleop teleop_keyboard --ros-args -r /cmd_vel:=/tb3_2/cmd_vel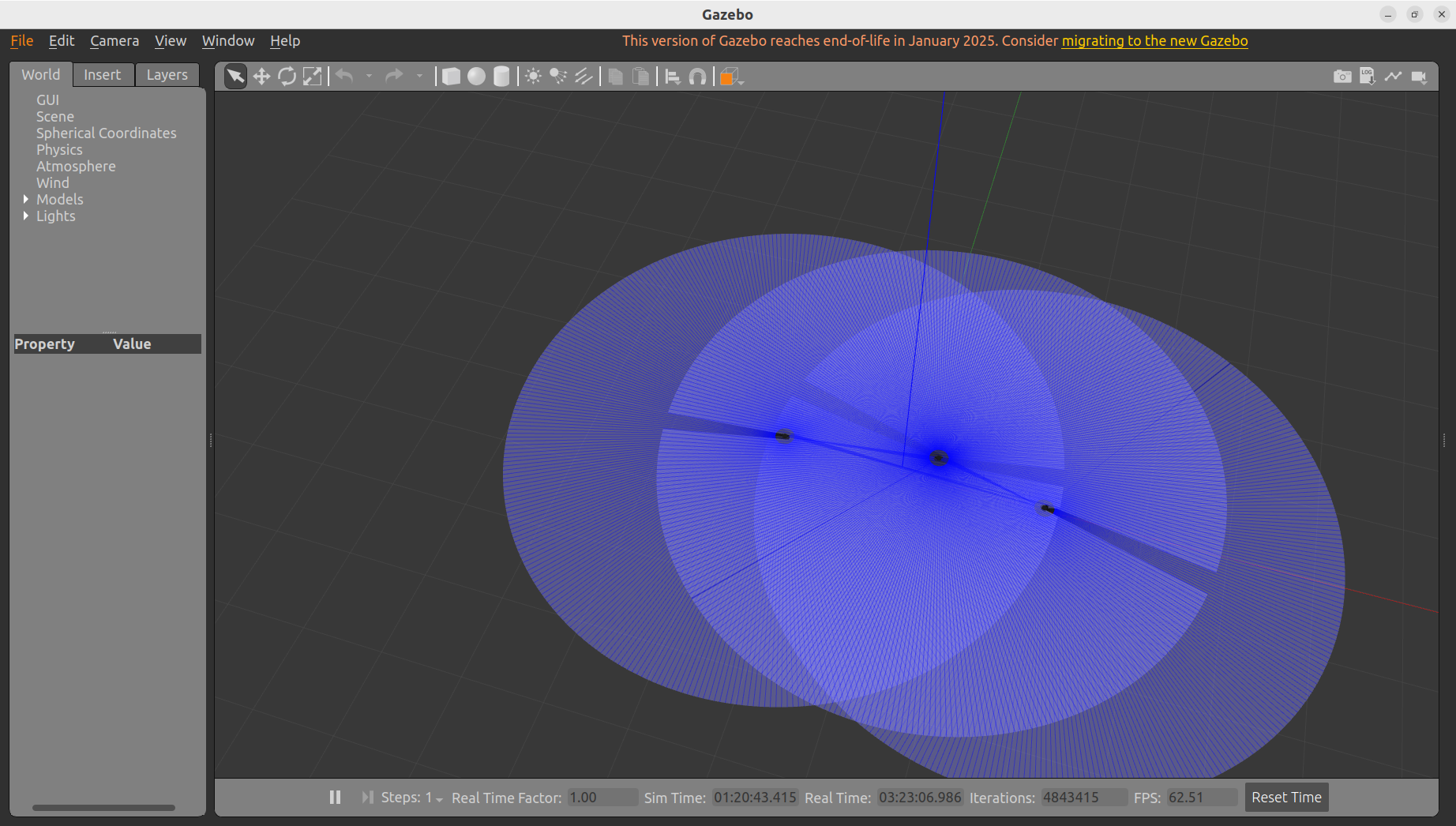
二、在gazebo仿真场景中添加3台turtolebot3无人车(法二)
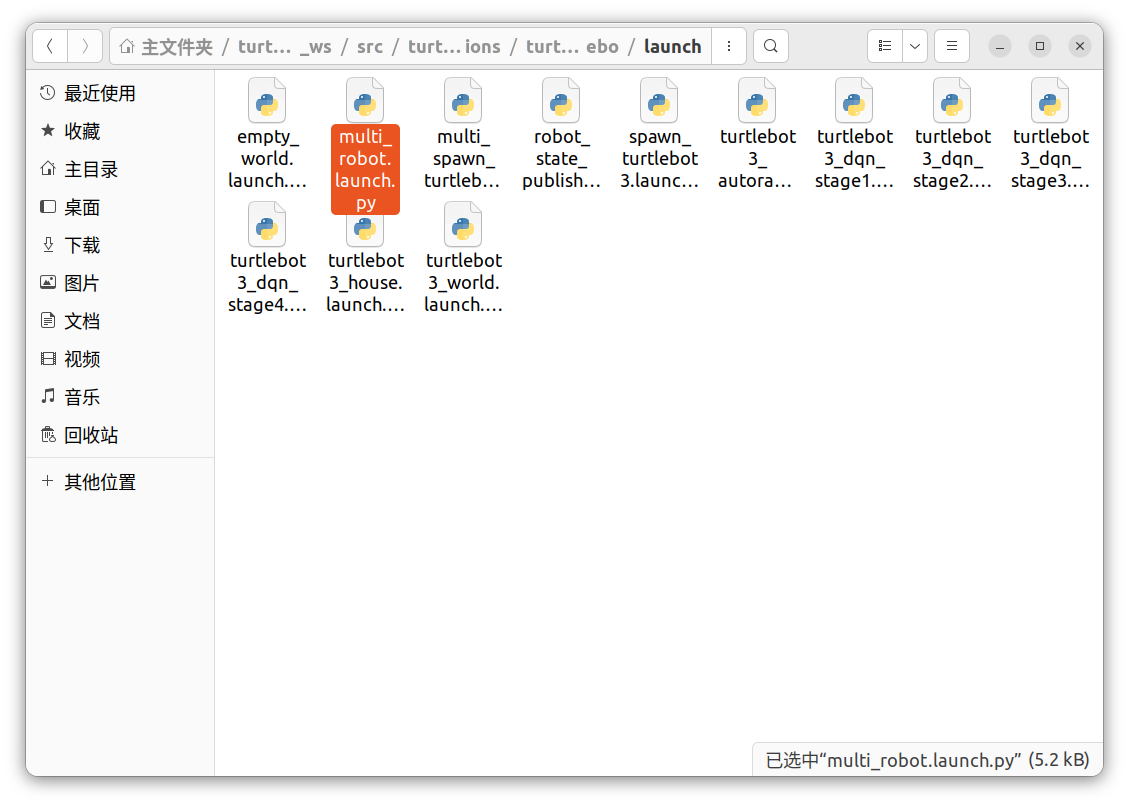
直接修改turtlebot3原文件multi_robot.launch.py,更推荐,不卡,可扩展
文件位置/home/wjrgfdy/turtlebot3_ws/src/turtlebot3_simulations/turtlebot3_gazebo/launch
原文件内容如下:
#!/usr/bin/env python3
#
# Copyright 2019 ROBOTIS CO., LTD.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
#
# Authors: Joep Tool, HyunGyu Kim
import os
import xml.etree.ElementTree as ET
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import GroupAction
from launch.actions import IncludeLaunchDescription
from launch.actions import RegisterEventHandler
from launch.event_handlers import OnShutdown
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch.substitutions import LaunchConfiguration
from launch_ros.actions import PushRosNamespace
def generate_launch_description():
TURTLEBOT3_MODEL = os.environ['TURTLEBOT3_MODEL']
number_of_robots = 4
namespace = 'TB3'
pose = [[-2, -0.5], [0.5, -2], [2, 0.5], [-0.5, 2]]
model_folder = 'turtlebot3_' + TURTLEBOT3_MODEL
urdf_path = os.path.join(
get_package_share_directory('turtlebot3_gazebo'),
'models',
model_folder,
'model.sdf'
)
save_path = os.path.join(
get_package_share_directory('turtlebot3_gazebo'),
'models',
model_folder,
'tmp'
)
launch_file_dir = os.path.join(get_package_share_directory('turtlebot3_gazebo'), 'launch')
pkg_gazebo_ros = get_package_share_directory('gazebo_ros')
use_sim_time = LaunchConfiguration('use_sim_time', default='false')
world = os.path.join(
get_package_share_directory('turtlebot3_gazebo'),
'worlds',
'turtlebot3_world.world'
)
gzserver_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(pkg_gazebo_ros, 'launch', 'gzserver.launch.py')
),
launch_arguments={'world': world}.items()
)
gzclient_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(pkg_gazebo_ros, 'launch', 'gzclient.launch.py')
)
)
robot_state_publisher_cmd_list = []
for count in range(number_of_robots):
robot_state_publisher_cmd_list.append(
IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(launch_file_dir, 'robot_state_publisher.launch.py')
),
launch_arguments={
'use_sim_time': use_sim_time,
'frame_prefix': f'{namespace}_{count+1}'
}.items()
)
)
spawn_turtlebot_cmd_list = []
for count in range(number_of_robots):
tree = ET.parse(urdf_path)
root = tree.getroot()
for odom_frame_tag in root.iter('odometry_frame'):
odom_frame_tag.text = f'{namespace}_{count+1}/odom'
for base_frame_tag in root.iter('robot_base_frame'):
base_frame_tag.text = f'{namespace}_{count+1}/base_footprint'
for scan_frame_tag in root.iter('frame_name'):
scan_frame_tag.text = f'{namespace}_{count+1}/base_scan'
urdf_modified = ET.tostring(tree.getroot(), encoding='unicode')
urdf_modified = '<?xml version="1.0" ?>\n'+urdf_modified
with open(f'{save_path}{count+1}.sdf', 'w') as file:
file.write(urdf_modified)
spawn_turtlebot_cmd_list.append(
IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(launch_file_dir, 'multi_spawn_turtlebot3.launch.py')
),
launch_arguments={
'x_pose': str(pose[count][0]),
'y_pose': str(pose[count][1]),
'robot_name': f'{TURTLEBOT3_MODEL}_{count+1}',
'namespace': f'{namespace}_{count+1}',
'sdf_path': f'{save_path}{count+1}.sdf'
}.items()
)
)
ld = LaunchDescription()
# Add the commands to the launch description
ld.add_action(gzserver_cmd)
ld.add_action(gzclient_cmd)
ld.add_action(RegisterEventHandler(
OnShutdown(
on_shutdown=lambda event,
context: [os.remove(f'{save_path}{count+1}.sdf') for count in range(number_of_robots)]
)
))
for count, spawn_turtlebot_cmd in enumerate(spawn_turtlebot_cmd_list, start=1):
ld.add_action(GroupAction([PushRosNamespace(f'{namespace}_{count}'),
robot_state_publisher_cmd_list[count-1],
spawn_turtlebot_cmd]))
return ld将文件复制到/home/wjrgfdy/turtlebot3_ws/src/my_turtlebot3_sim/launch下
📁 整体文件架构
你的工作空间(例如:~/turtlebot3_ws/)
├── src/
│ └── my_turtlebot3_sim/ # 你自定义的功能包
│ ├── launch/
│ │ ├── multi_robot.launch.py # 修改的turtlebot3原文件
│ │ ├── multi_tb3.launch.py # 多机器人启动文件
│ │ └── single_tb3.launch.py # 单机器人启动文件
│ ├── worlds/
│ │ └── my_world.world # 你的Gazebo世界文件
│ ├── config/
│ │ └── rviz/
│ │ └── multi_tb3.rviz # RViz配置文件
│ ├── package.xml
│ └── setup.py
├── build/
├── install/
└── log/修改launch文件后如下,可自选world文件
#!/usr/bin/env python3
#
# Copyright 2019 ROBOTIS CO., LTD.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
#
# Authors: Joep Tool, HyunGyu Kim
import os
import xml.etree.ElementTree as ET
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import GroupAction
from launch.actions import IncludeLaunchDescription
from launch.actions import RegisterEventHandler
from launch.event_handlers import OnShutdown
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch.substitutions import LaunchConfiguration
from launch_ros.actions import PushRosNamespace
def generate_launch_description():
TURTLEBOT3_MODEL = os.environ['TURTLEBOT3_MODEL']
number_of_robots = 4
namespace = 'TB3'
pose = [[-2, -0.5], [0.5, -2], [2, 0.5], [-0.5, 2]]
model_folder = 'turtlebot3_' + TURTLEBOT3_MODEL
urdf_path = os.path.join(
get_package_share_directory('turtlebot3_gazebo'),
'models',
model_folder,
'model.sdf'
)
save_path = os.path.join(
get_package_share_directory('turtlebot3_gazebo'),
'models',
model_folder,
'tmp'
)
launch_file_dir = os.path.join(get_package_share_directory('turtlebot3_gazebo'), 'launch')
pkg_gazebo_ros = get_package_share_directory('gazebo_ros')
pkg_my_turtlebot3_sim = get_package_share_directory('my_turtlebot3_sim')
use_sim_time = LaunchConfiguration('use_sim_time', default='false')
world = os.path.join(pkg_my_turtlebot3_sim, 'worlds', 'myworld.world')
gzserver_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(pkg_gazebo_ros, 'launch', 'gzserver.launch.py')
),
launch_arguments={'world': world}.items()
)
gzclient_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(pkg_gazebo_ros, 'launch', 'gzclient.launch.py')
)
)
robot_state_publisher_cmd_list = []
for count in range(number_of_robots):
robot_state_publisher_cmd_list.append(
IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(launch_file_dir, 'robot_state_publisher.launch.py')
),
launch_arguments={
'use_sim_time': use_sim_time,
'frame_prefix': f'{namespace}_{count+1}'
}.items()
)
)
spawn_turtlebot_cmd_list = []
for count in range(number_of_robots):
tree = ET.parse(urdf_path)
root = tree.getroot()
for odom_frame_tag in root.iter('odometry_frame'):
odom_frame_tag.text = f'{namespace}_{count+1}/odom'
for base_frame_tag in root.iter('robot_base_frame'):
base_frame_tag.text = f'{namespace}_{count+1}/base_footprint'
for scan_frame_tag in root.iter('frame_name'):
scan_frame_tag.text = f'{namespace}_{count+1}/base_scan'
urdf_modified = ET.tostring(tree.getroot(), encoding='unicode')
urdf_modified = '<?xml version="1.0" ?>\n'+urdf_modified
with open(f'{save_path}{count+1}.sdf', 'w') as file:
file.write(urdf_modified)
spawn_turtlebot_cmd_list.append(
IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(launch_file_dir, 'multi_spawn_turtlebot3.launch.py')
),
launch_arguments={
'x_pose': str(pose[count][0]),
'y_pose': str(pose[count][1]),
'robot_name': f'{TURTLEBOT3_MODEL}_{count+1}',
'namespace': f'{namespace}_{count+1}',
'sdf_path': f'{save_path}{count+1}.sdf'
}.items()
)
)
ld = LaunchDescription()
# Add the commands to the launch description
ld.add_action(gzserver_cmd)
ld.add_action(gzclient_cmd)
ld.add_action(RegisterEventHandler(
OnShutdown(
on_shutdown=lambda event,
context: [os.remove(f'{save_path}{count+1}.sdf') for count in range(number_of_robots)]
)
))
for count, spawn_turtlebot_cmd in enumerate(spawn_turtlebot_cmd_list, start=1):
ld.add_action(GroupAction([PushRosNamespace(f'{namespace}_{count}'),
robot_state_publisher_cmd_list[count-1],
spawn_turtlebot_cmd]))
return ld编译运行
cd ~/turtlebot3_ws
colcon build --packages-select my_turtlebot3_sim
source install/setup.bash
conda deactivate
pkill -f gzserver
pkill -f gzclient
ros2 launch my_turtlebot3_sim multi_robot.launch.py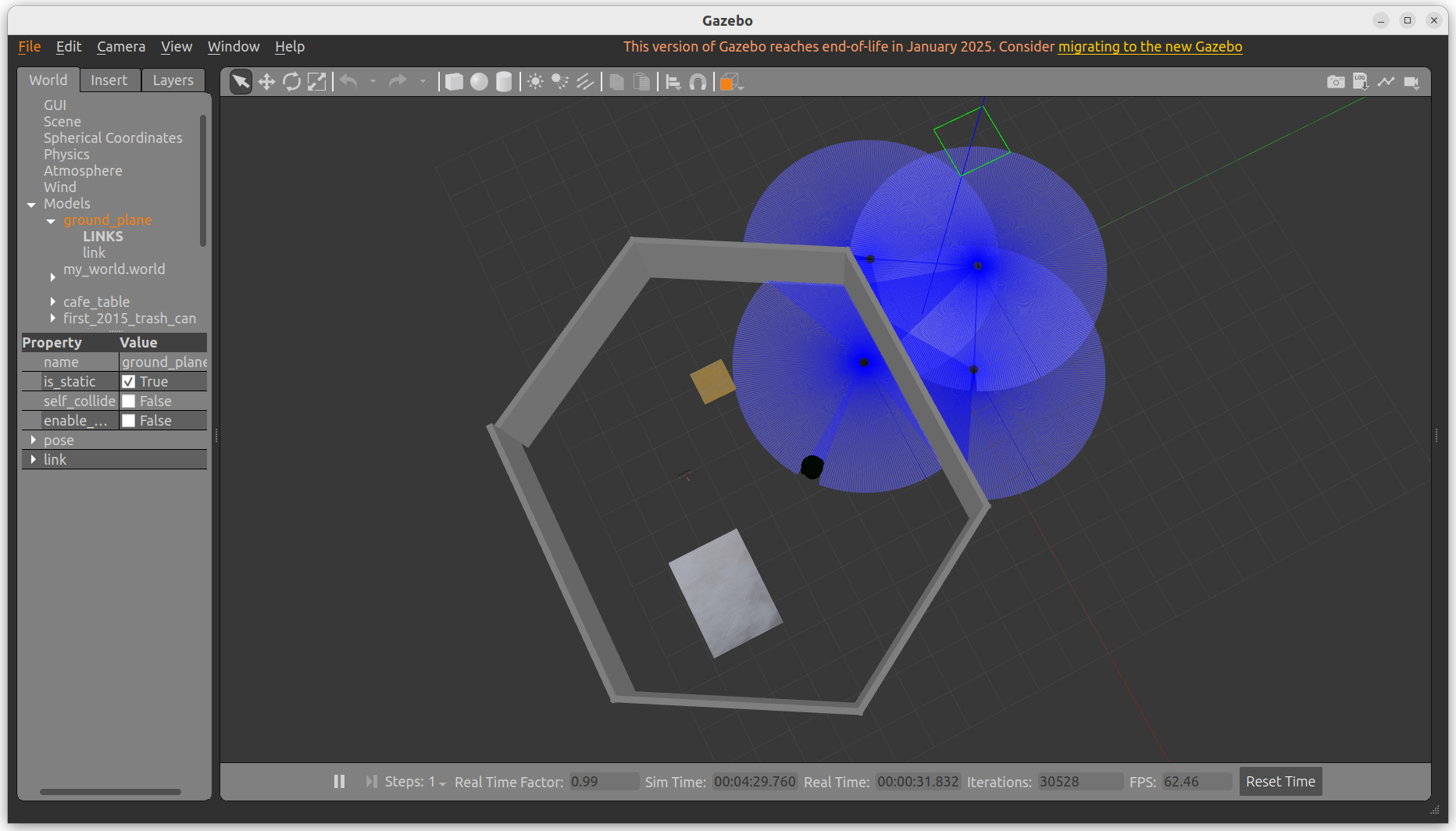
控制机器人移动
ros2 run teleop_twist_keyboard teleop_twist_keyboard --ros-args -r cmd_vel:=/TB3_1/cmd_vel
ros2 run teleop_twist_keyboard teleop_twist_keyboard --ros-args -r cmd_vel:=/TB3_2/cmd_vel
ros2 run teleop_twist_keyboard teleop_twist_keyboard --ros-args -r cmd_vel:=/TB3_3/cmd_vel
ros2 run teleop_twist_keyboard teleop_twist_keyboard --ros-args -r cmd_vel:=/TB3_4/cmd_vel
中国智能体开发者社区,聚焦智能体与大模型开发,提供前沿资讯、实用工具链、开源项目及行业案例。通过技术沙龙、开发者大赛等活动,促进经验交流与协作,助力开发者快速构建创新智能应用。
更多推荐

 12
12 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)