基于YOLOv8v10v11深度学习的木材木头表面缺陷识别系统(python源码+Pyqt5界面+数据集+训练代码)
本项目“木材缺陷识别系统”聚焦木材表面缺陷的自动化检测,面向工业质检与科研应用,基于 Ultralytics YOLO 系列模型(YOLOv8/YOLOv10/YOLOv11)实现对裂缝、死结、活结、带裂缝的结等关键缺陷的高效识别。系统提供图形化桌面应用(PyQt5),支持图片、视频、摄像头三种检测模式,并集成语音播报(TTS)、结果可视化、检测历史管理、统计分析(基于 MySQL 与 matpl
1. 项目摘要介绍与核心技术栈
本项目“木材缺陷识别系统”聚焦木材表面缺陷的自动化检测,面向工业质检与科研应用,基于 Ultralytics YOLO 系列模型(YOLOv8/YOLOv10/YOLOv11)实现对裂缝、死结、活结、带裂缝的结等关键缺陷的高效识别。系统提供图形化桌面应用(PyQt5),支持图片、视频、摄像头三种检测模式,并集成语音播报(TTS)、结果可视化、检测历史管理、统计分析(基于 MySQL 与 matplotlib)等功能模块,覆盖“采集—检测—存储—分析—呈现”全链路流程。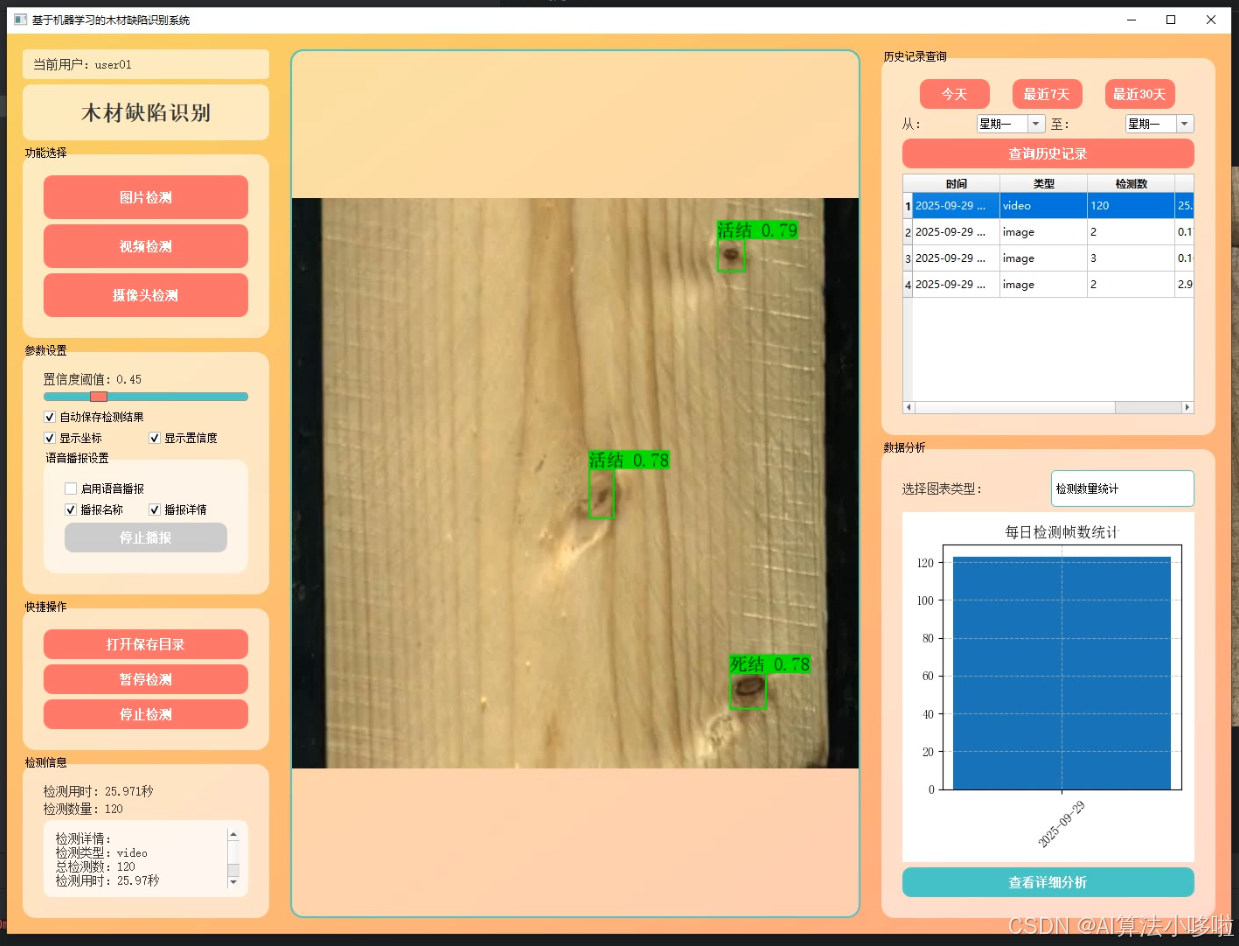
-
核心能力概述:
- 缺陷检测:YOLO 系列单阶段目标检测器,实时性能优、部署简易。
- 多源输入:支持图片、视频文件、实时摄像头流。
- 中文可视化:在检测图像上以中文标签与置信度绘制标注。
- 语音播报:基于在线 TTS 的中文播报,结果可缓存复用。
- 数据管理:检测历史入库,支持按时间范围检索、详情查看。
- 可视化分析:内置分布统计图、饼图与直方图,多维洞察检测数据。
-
核心技术栈:
- 深度学习推理:Ultralytics
YOLO(v8/v10/v11),PyTorch/TorchVision - 计算机视觉:OpenCV、Pillow(图像处理与绘制)
- 桌面应用:PyQt5(UI 组件、信号槽、多线程)
- 数据可视化:Matplotlib/Seaborn
- 数据存储:MySQL(检测历史与统计)、PyMySQL(数据库连接)
- 语音能力:TTS(在线接口,含本地缓存)、Pygame(本地播放)
- 其他:Requests、NumPy、CSV 工具、OS/Path 工具
- 深度学习推理:Ultralytics
✅点击跳转至文末所有涉及的完整视频和代码文件下载页✅
基于YOLOv8v10v11深度学习的4种木材木头木料缺陷智能检测与识别系统(含Python源码、PyQt5界面、数据集与训练代码)
2. 选题的意义与背景
木材作为最古老且最广泛使用的自然材料之一,贯穿建筑、家具、装饰、物流、乐器、文化创意等诸多行业。在全球绿色材料与碳中和趋势推动下,木材因其可再生、低碳、可循环等属性,呈现出更广阔的应用前景。然而,在从原木到成材、从伐采到深加工的全流程中,木材的天然属性也导致其内部与表面常常存在不确定性与缺陷,如裂缝、节疤(活结、死结)、虫眼、树脂囊等。不同类型与程度的缺陷不仅直接影响成品外观与力学性能,也会对后续加工(如干燥、刨切、胶合、涂装)造成显著影响。如何在保证效率的前提下早期、准确地发现并量化缺陷,是提高产品质量、降低返工率、优化物料利用率的关键。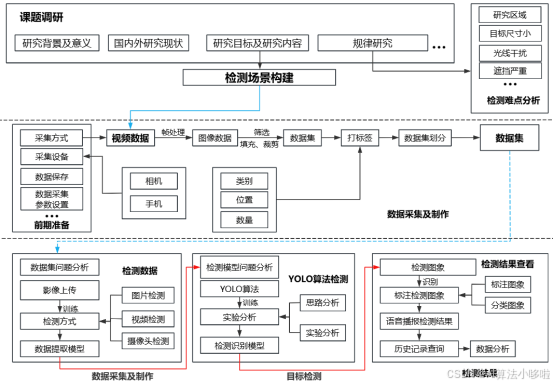
在传统生产线上,木材外观质检多依赖人工目测与经验判断。该方式存在以下痛点:
- 人工疲劳与主观性:长时间重复性检测极易疲劳,且不同检验员对缺陷的定义、容忍度存在主观差异,导致一致性差。
- 成本高与效率瓶颈:随着产线规模扩大与节拍提升,人工检验的人力成本与上限效率难以支撑高并发需求。
- 难以闭环与追溯:人工记录零散,难以形成结构化数据,后续分析与质量追溯成本高、效率低。
基于机器视觉与深度学习的自动化检测成为可行且可落地的解决方案。以 YOLO 系列为代表的单阶段目标检测算法在工业场景中已被广泛验证:其端到端的结构天然适配“实时+高精度”的需求,且基于现有硬件(如边缘 GPU 或通用显卡工作站)即可达到可观的推理速度。在木材缺陷检测场景中,其优势主要体现在:
- 端到端推理快速,易于在线部署到生产线(如与相机、传送带联动)。
- 对缺陷类型的可扩展性强:可根据企业自有数据与质检标准扩展标签集、迁移训练新模型。
- 可与生产数据打通,构建闭环的质量管理体系:从缺陷结构化记录、到趋势分析、再到工艺参数优化。
本项目从实用主义出发,构建了完整的“木材缺陷识别系统”。其特点包括:
- 多输入适配:支持离线图片、视频历史复检,也支持在线摄像头实时检测,贴近真实产线需求。
- 人机交互友好:提供 PyQt5 桌面 UI,关键参数(置信度阈值、显示项)可调,检测结果即显即用。
- 中文可视化与播报:针对中文用户场景优化了检测结果的中文化呈现与语音播报,提升体验与效率。
- 数据化沉淀:检测历史与详情入库,支持按时间段查询和分析,支撑后续管理决策与算法迭代。
- 可扩展可复用:代码结构清晰,训练脚本与推理模块相对解耦,便于替换新模型与接入新功能(如分割、关键点)。
在产业价值层面,自动化木材缺陷识别的意义体现在:
- 质量一致性与可追溯:标准化算法可减少人为波动,通过记录与统计实现全流程质控追踪。
- 降本增效:流水线上减少人工检验强度,提升节拍,降低错检与漏检带来的返工与材料浪费。
- 数据驱动的工艺优化:通过统计分析不同工艺批次的缺陷分布与趋势,指导干燥、切削、胶合等工序参数调优。
- 可持续发展:对材料品质的更精准把控,有助于提升木材利用率,减少不必要的丢弃与浪费,契合绿色制造目标。
从科研与教学视角,本项目提供了可复现实验环境、清晰的数据配置与训练脚本、直观的可视化结果,既能够用于课程教学,也适合学术研究与工程验证。通过对 YOLOv8/YOLOv10/YOLOv11 的对比,读者可以从工程指标(如 mAP、Precision、Recall、训练耗时)与可视化图(收敛曲线、混淆矩阵、雷达图等)中深入理解不同版本 YOLO 的结构设计取舍与性能差异。系统还封装了图像中文绘制、信息播报、批量帧结果存储等工程细节,为进一步的系统化研发提供参考。
综上,木材缺陷识别不仅是一个机器视觉应用问题,更承载着制造业数字化、智能化转型的现实诉求。本项目致力于将前沿算法与工程落地打通,降低应用门槛,帮助更多实际场景惠及于 AI 识别技术带来的效率提升与质量飞跃。
3. 数据集介绍
本项目的数据集通过 datasets/DATASET/data.yaml 进行配置,定义了训练集、验证集与测试集的路径与类别信息。根据随项目提供的统计报告与配置文件,可得以下关键信息:
- 路径配置(Windows 本地路径):
- 训练集:D:\DevApps\trainData\train
- 验证集:D:\DevApps\trainData\valid
- 测试集:D:\DevApps\trainData\test
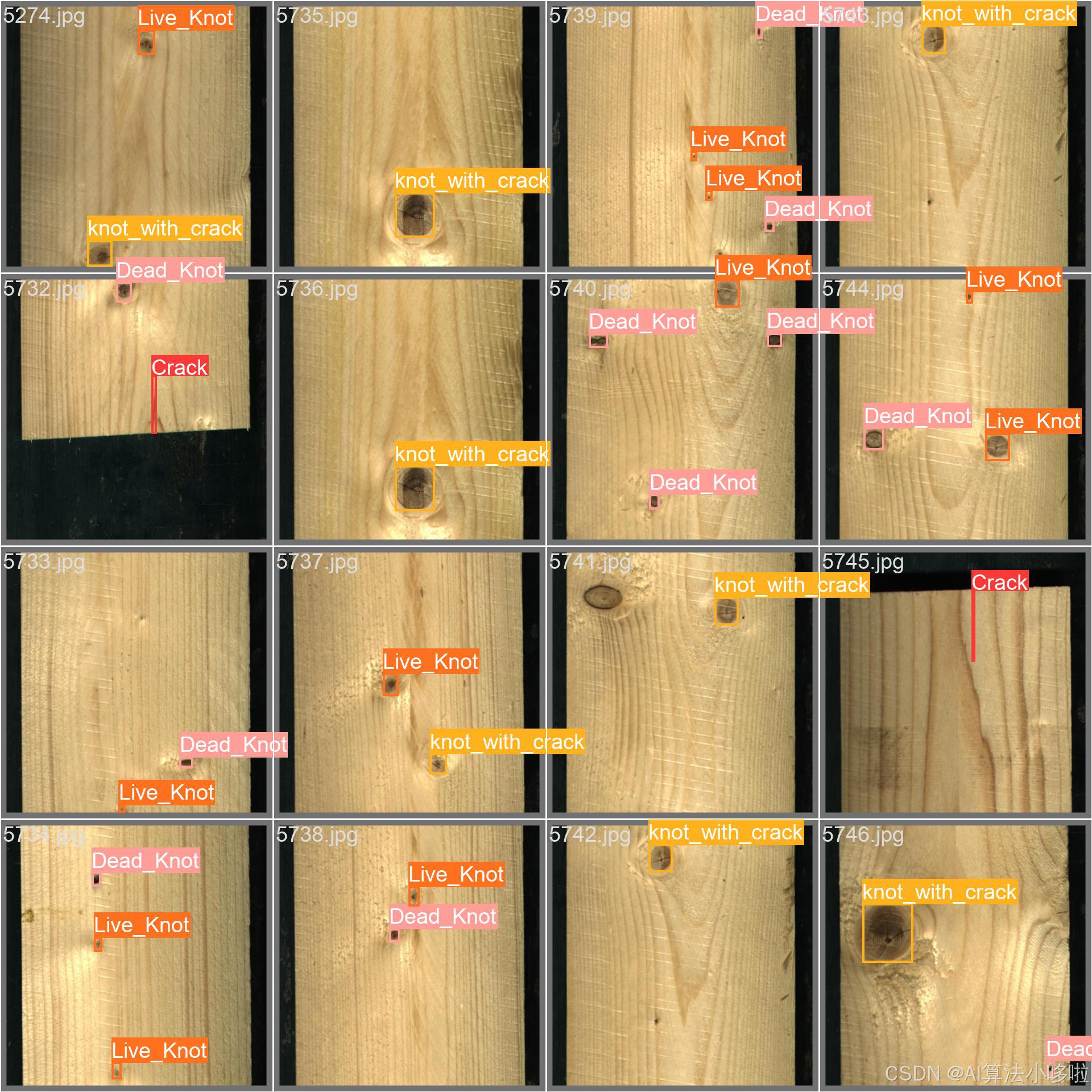
- 类别数(nc):4
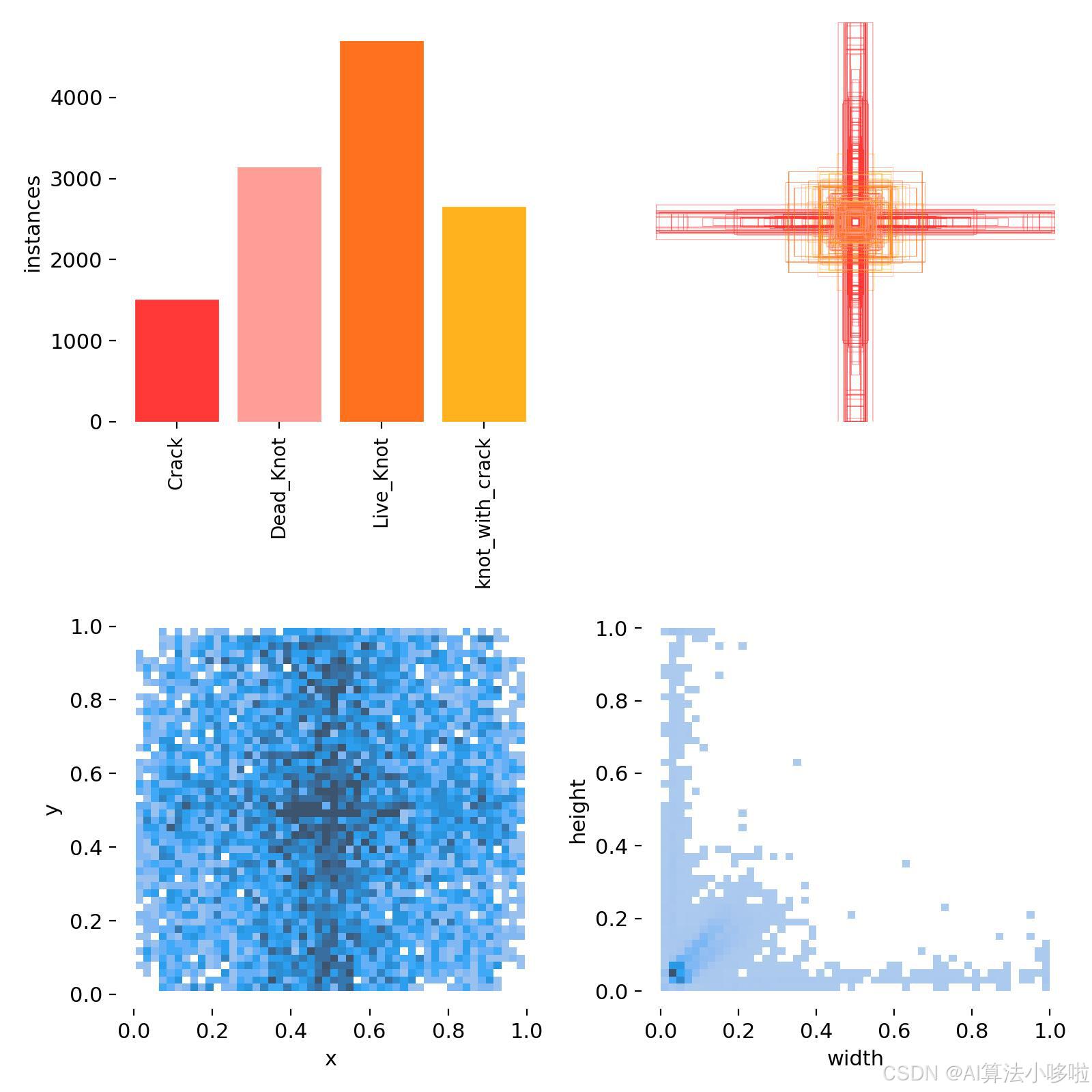
- 类别名称:Crack、Dead_Knot、Live_Knot、knot_with_crack(中文:裂缝、死结、活结、带裂缝的结)
- 数据规模(见“对比分析报告”统计):训练 4848 张、验证 694 张、测试 425 张,总计 5967 张
为便于读者快速了解数据组织与含义,整理如下表格(说明性表格,无代码):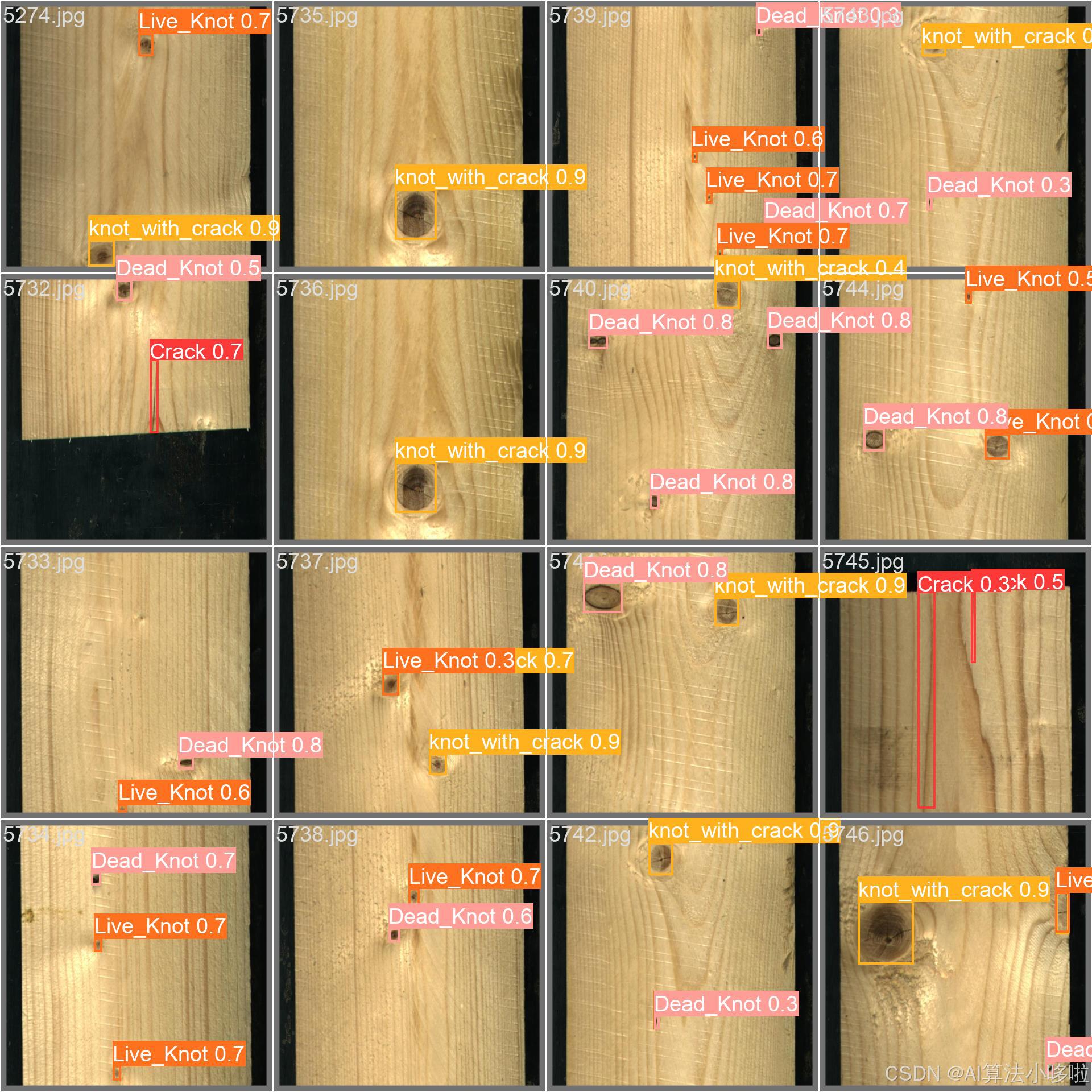
| 维度 | 内容 | 说明 |
|---|---|---|
| 数据根配置 | datasets/DATASET/data.yaml |
YOLO 数据接口配置文件 |
| 训练集路径 | D:\DevApps\trainData\train | 包含训练图像与对应 .txt 标签 |
| 验证集路径 | D:\DevApps\trainData\valid | 用于调参与早停的指标评估 |
| 测试集路径 | D:\DevApps\trainData\test | 用于最终泛化性能评估 |
| 总量统计 | 5967 张 | 训练/验证/测试分别为 4848/694/425 |
| 类别数 | 4 | 见下方类别定义 |
| 类别英文名称 | Crack, Dead_Knot, Live_Knot, knot_with_crack | 对应中文见下 |
| 类别中文名称 | 裂缝、死结、活结、带裂缝的结 | 与系统中文标注一致 |
| 标注格式 | YOLO 标注(中心点 x,y 与宽高 w,h 的相对坐标) | 每行为“class cx cy w h” |
类别定义补充说明:
- 裂缝(Crack):木材表面出现的线性断裂或开裂,常因干燥不均、内应力释放导致。
- 死结(Dead_Knot):脱落或非活性节疤,易产生孔洞或周围纤维断裂区域,通常影响结构强度与外观。
- 活结(Live_Knot):仍与周围纤维结合紧密的节疤,强度影响较小但影响外观与局部加工性。
- 带裂缝的结(knot_with_crack):在节疤区域同时存在裂缝的复合缺陷,通常更复杂且对结构影响更大。
数据来源与采集:
- 数据可能来源于企业产线采集、开源样例数据与自建样本库的组合(结合路径与规模特征推断)。
- 为保证泛化与鲁棒性,建议覆盖不同树种、纹理、含水率、光照环境、拍摄角度与距离;并适当引入难例(如微小裂缝、低对比度缺陷、纹理伪影)。
数据分割策略:
- 采用训练/验证/测试三分法。训练集用于参数学习;验证集用于调参与早停;测试集仅用于最终指标报告,避免信息泄露。
- 若存在批次或来源差异,建议按批次/来源进行分层抽样,避免训练/验证/测试集分布偏移导致评估偏差。
数据预处理与增强(建议实践):
- 尺寸归一:训练时常用输入尺寸 640×640,保证多尺度鲁棒性可结合随机缩放。
- 颜色空间与光照:可适度做色彩抖动、亮度对比度调整,提升对不同产线光照的适应力。
- 形变与裁剪:随机翻转、旋转、仿射变换与随机裁剪,有助于缓解过拟合并提升对姿态/角度变化的鲁棒性。
- Mosaic/MixUp:YOLO 训练中常用的数据增强手段(具体策略以 Ultralytics 默认管线为准),在目标较小或密集时常见收益。
- 标签质量控制:定期核验标签偏移与不一致问题;对复合缺陷(如带裂缝的结)需确保标注规范统一。
标注文件组织:
- 每张图像对应一个同名
.txt文件,内含多行标注,每行代表一个缺陷实例。 - 每行格式:
class cx cy w h,其中坐标均为相对比例(0~1)。
扩展与维护建议:
- 若后续新增类别(如虫眼、树脂囊等),需同步更新
data.yaml的nc与names,并补充足够样本训练; - 对于难例或误检集中样本,建议建立“难例库”并进行有针对性的再训练(fine-tuning),持续改进精度与召回。
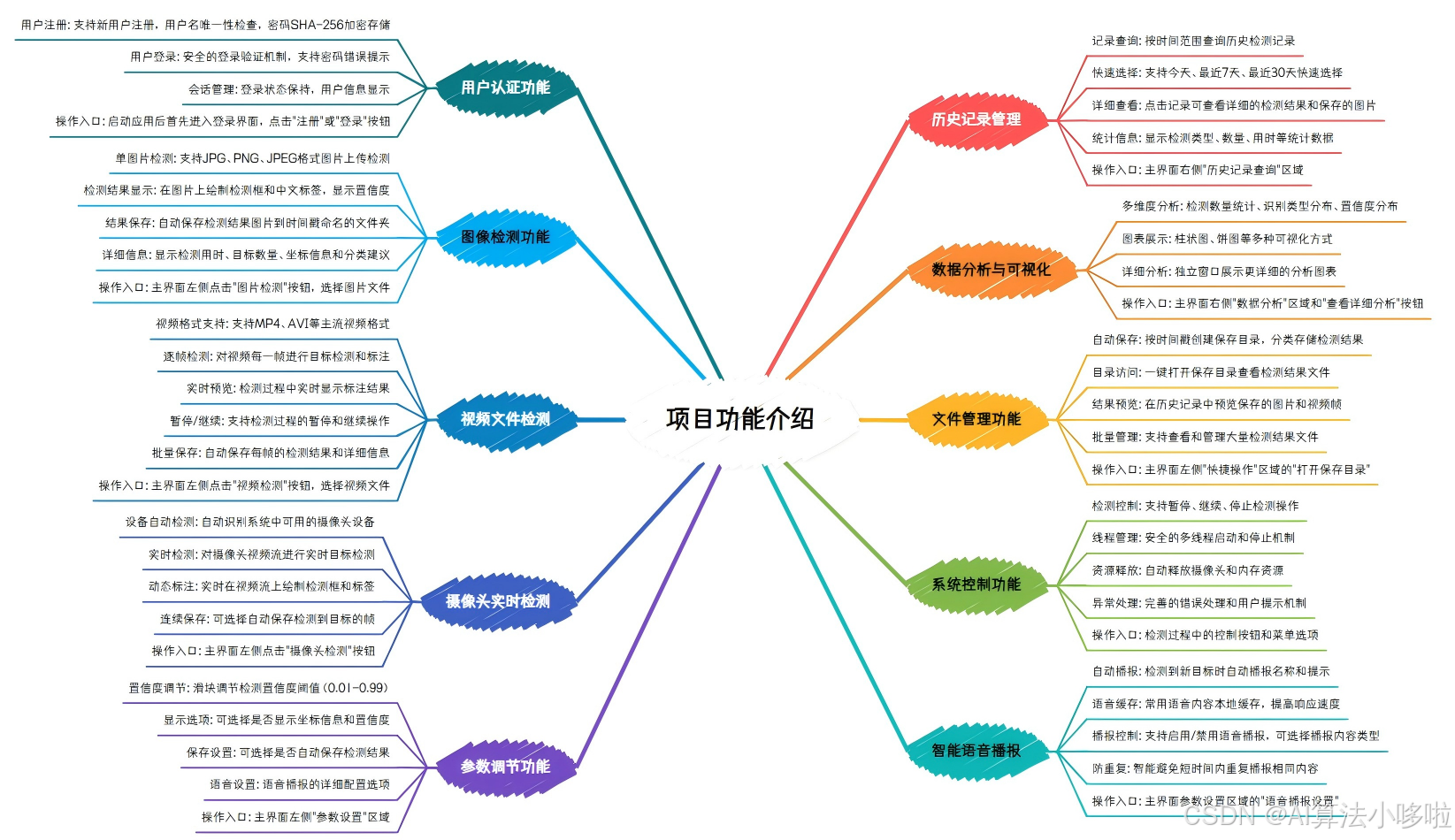
4. 项目功能介绍
-
图形化桌面应用(PyQt5)

-
主界面集成图片检测、视频检测、摄像头检测三个入口;提供参数设置与结果展示区域。


-
控件包含:置信度阈值滑块、显示项勾选(坐标/置信度)、语音播报开关与选项、快捷操作与历史记录等。


-
-
多源输入检测
-
图片检测:选择单张图片,完成检测并保存结果图;统计检出数与用时。

-
视频检测:逐帧检测视频,支持暂停/继续与停止;可保存每帧标注图与文本详情。
-
摄像头检测:自动轮询可用摄像头 ID,实时显示与保存;适配产线在线检测。
-
-
中文可视化与播报
- 在检测图像上以中文标签绘制类别与置信度;
- 将检出结果通过语音合成播报,可选择播报“名称/详情”,并支持一键停止与缓存复用。
-
数据存储与历史检索
- 基于 MySQL 存储检测历史(时间、类型、数量、用时、保存目录)与检测详情(类别、置信度、帧号)。
- 支持日期范围查询、单条历史详情查看(含图片/帧预览、帧信息文本)。
-
数据分析与可视化
- 提供“检测数量统计”“识别类型分布”“置信度分布”三类内嵌图;
- 支持“查看详细分析”,输出分类分布饼图、置信度分布柱状图等。

-
训练脚本与算法对比
- 提供 YOLOv8/YOLOv10/YOLOv11 的训练脚本与训练结果目录;
- 附带收敛曲线、混淆矩阵、P-R 曲线、雷达图、效率对比等图像,便于横向评估。

-
配置管理与一键清理
- 通过统一的配置文件管理模型路径、保存目录、数据库连接与中文标签等;
- 支持启动时清空历史记录与保存目录,确保实验环境可控。
5. 算法理论介绍
YOLO(You Only Look Once)系列算法是单阶段目标检测框架的代表,其核心思想是在单次前向传播中同时完成目标的位置回归与类别判定,从而实现高效率的端到端检测。与两阶段方法(如 Faster R-CNN)相比,YOLO 将候选框生成与分类回归统一在卷积神经网络(CNN)结构中,显著降低计算冗余,具备更强的实时性与部署友好性。
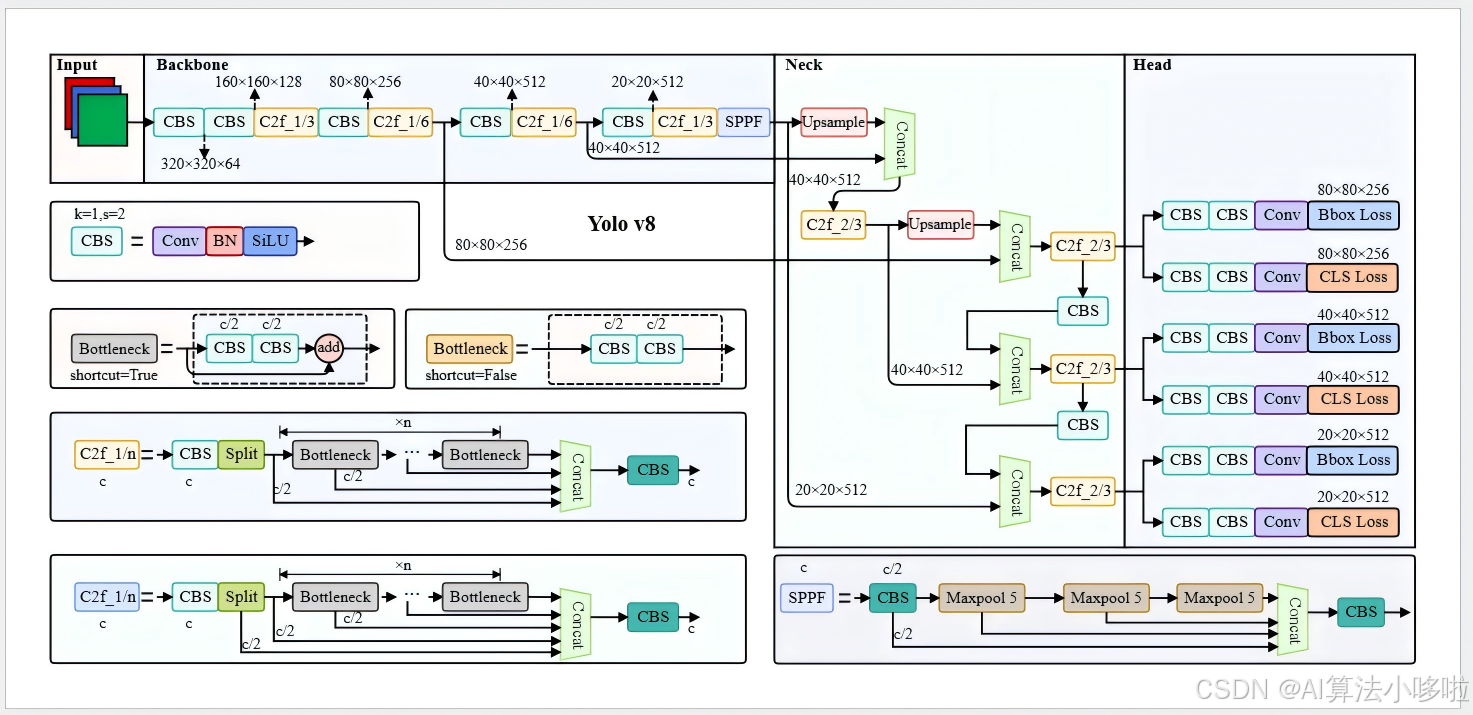
典型 YOLO 检测流程包括:
- 特征提取:利用主干网络(Backbone)对输入图像进行多尺度特征提取,逐步将空间分辨率降低、通道数提升,获得语义丰富的高层特征;
- 特征融合:在颈部网络(Neck)将不同尺度的特征进行融合(如 FPN、PAN),以兼顾小目标与大目标的检测需求;
- 检测头:在多个尺度的特征图上并联检测头,输出边界框位置(中心点与宽高)、类别分布与置信度等;
- 后处理:对网络输出进行阈值筛选与 NMS(非极大值抑制),得到最终检测结果。
YOLOv8:
Ultralytics 推出的 YOLOv8 对网络结构、损失函数与训练策略进行了工程化优化。其常见特性包括:
- 更简洁的 C2f 模块与更高效的特征路径设计,提升推理速度与易用性;
- Anchor-free 检测头(官方实现随版本演进会有变动),在标签分配与正负样本定义方面更灵活;
- 训练中内置的数据增强与自动混合精度支持,提高训练效率与稳定性。
YOLOv10:
近年来的工作在“高效训练与部署”方向进行了探索。YOLOv10 的公开论文强调了在保持精度的同时进一步降低延迟,涵盖动态标签分配、轻量化结构与部署感知优化等思路。对工业场景而言,YOLOv10 的优势在于其整体延迟与吞吐提升,适配边缘设备与高帧率流水线。
YOLOv11:
作为 Ultralytics 的又一次工程迭代,YOLOv11 更聚焦于易用性与整体性能的均衡,配套工具链更加完善。在工程实践中,YOLOv11 常在相似训练时长下表现出更好的综合指标与更鲁棒的收敛表现,适用于对精度与稳定性兼顾的生产需求。
与木材缺陷检测的契合点:
- 多尺度目标:木材裂缝与节疤的尺度差异较大,YOLO 的多尺度检测头有助于同时兼顾细小裂缝与较大节疤;
- 纹理干扰:木材纹理复杂、伪影多,鲁棒的特征学习与合适的阈值设置能有效减少误检;
- 实时性要求:产线节拍要求检测延迟低、吞吐高;YOLO 的单阶段特性非常契合;
- 可扩展性:类别增删、数据增广、迁移学习都较为便捷,符合企业持续演进的需求。
评价指标与训练观测:
- mAP@0.5 与 mAP@0.5:0.95:衡量整体定位与分类性能的核心指标,其中后者对 IoU 更严格,能体现边界框拟合质量;
- Precision/Recall:分别反映误检率与漏检率,工业场景中往往平衡二者或按业务偏好权衡;
- 收敛曲线:训练/验证损失、mAP 与 P-R 曲线等,可用于发现过拟合、欠拟合与数据问题;
- 混淆矩阵:用于分析不同缺陷类别间的混淆现象,为数据与模型改进提供依据。
在工程实践中,模型选择需要在“精度、速度、资源成本”之间做权衡。YOLOv8 以成熟与稳定见长,YOLOv10 更强调时延效率,而 YOLOv11 则体现综合平衡。结合本项目的对比结果(后续章节详述),我们可以在目标设备、实时性与精度侧重点不同的情况下,选择最适合的版本,并通过阈值、后处理、数据增强等策略继续优化。
6. 核心代码介绍
以下代码片段选自本项目的关键模块,涉及 UI 交互、中文可视化绘制、线程化视频/摄像头检测与结果保存、以及 TTS 播放等。为保护安全,第三方秘钥在展示时已做隐藏或省略处理。
代码片段 A:中文可视化绘制(核心绘制逻辑)
def plot_with_chinese(image, boxes, conf_threshold, font_path='Font/simsun.ttc'):
image_rgb = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
img = Image.fromarray(image_rgb)
draw = ImageDraw.Draw(img)
font = ImageFont.truetype(font_path, 20)
if len(boxes) > 0:
for box in boxes:
conf = float(box.conf[0])
cls = int(box.cls[0])
xyxy = box.xyxy[0].cpu().numpy()
if conf >= conf_threshold and cls < len(CH_names):
x1, y1, x2, y2 = map(int, xyxy)
draw.rectangle([x1, y1, x2, y2], outline=(0, 255, 0), width=2)
label = f"{CH_names[cls]} {conf:.2f}"
bbox = font.getbbox(label)
text_width = bbox[2] - bbox[0]
text_height = bbox[3] - bbox[1]
draw.rectangle([x1, y1 - text_height - 2, x1 + text_width, y1], fill=(0, 255, 0))
draw.text((x1, y1 - text_height - 2), label, fill=(0, 0, 0), font=font)
return cv2.cvtColor(np.array(img), cv2.COLOR_RGB2BGR)
说明:该函数负责在检测结果图像上以中文渲染类别与置信度,核心流程包括颜色空间转换(BGR→RGB)、Pillow 绘制矩形框与文本背景、文字绘制与回转 OpenCV 格式。相较于直接用 OpenCV 的 putText,Pillow 能更好地支持中文字体与排版,避免乱码问题。函数接收 YOLO 推理得到的 boxes,逐个遍历后根据置信度阈值与类别范围进行筛选,随后绘制边界框与文本标签。文本背景的宽高通过字体 getbbox 计算得到,确保在不同字符长度下的自适应;颜色统一使用绿色框与黑色文字,便于工业场景下快速分辨。最终输出为 BGR 的 ndarray,与后续的 OpenCV、PyQt5 显示逻辑保持一致。通过该模块,系统在界面端实现了语言友好(中文)与信息完整(类别、置信度)的即时呈现,对于操作员快速理解与二次判读具有重要意义。
代码片段 B:视频检测线程(统计与结果落盘)
class VideoThread(QThread):
def __init__(self, model, video_path, conf_threshold, auto_save=True, save_dir=None):
super().__init__()
self.model = model
self.video_path = video_path
self.conf_threshold = conf_threshold
self.auto_save = auto_save
self.running = True
self.paused = False
self.save_dir = save_dir
self.total_frames = 0
self.total_detections = 0
def run(self):
cap = cv2.VideoCapture(self.video_path)
frame_count = 0
frames_with_detections = 0
self.start_time = time.time()
while cap.isOpened() and self.running:
if not self.paused:
success, frame = cap.read()
if success:
start_time = time.time()
results = self.model(frame, conf=self.conf_threshold)
detection_time = time.time() - start_time
frame_has_detection = False
frame_detections = 0
for box in results[0].boxes:
conf = float(box.conf[0])
cls = int(box.cls[0])
if conf >= self.conf_threshold and cls < len(CH_names):
frame_detections += 1
frame_has_detection = True
self.total_detections += 1
self.save_result_signal.emit(cls, conf, frame_count)
if frame_has_detection:
frames_with_detections += 1
annotated_frame = plot_with_chinese(frame, results[0].boxes, self.conf_threshold)
if self.auto_save:
cv2.imwrite(os.path.join(self.save_dir, f"frame_{frame_count}.jpg"), annotated_frame)
info_text = self.format_detection_info(results, detection_time)
with open(os.path.join(self.save_dir, f"frame_{frame_count}_info.txt"), 'w', encoding='utf-8') as f:
f.write(info_text)
# ...(发送 UI 信号、省略)...
frame_count += 1
else:
total_time = time.time() - self.start_time
stats = {'total_frames': frame_count, 'total_detections': frames_with_detections, 'total_time': total_time}
self.detection_finished.emit(stats)
break
cap.release()
说明:该线程贯穿“逐帧读取→推理→统计→可视化→落盘→UI 更新”的视频检测闭环。其设计重点在于:1)与 UI 主线程解耦,保障界面流畅;2)以帧粒度记录检测时间、检出数量,并将“有检测结果的帧数”作为更贴近业务的统计指标之一;3)在 auto_save 下,同时存储每帧的标注图与文本详情,便于后期复盘与追溯;4)通过信号将帧图像、信息文本、计时与计数等异步推送到 UI,并在视频结束或停止时发送 detection_finished 汇总统计,便于记录到数据库与界面展示。整体逻辑强调工程可用性与可追溯性,对产线质检的运营闭环至关重要。
代码片段 C:TTS 管理与安全(秘钥隐藏)
class TTSManager:
def __init__(self):
# 以下为占位示意,真实项目中请通过环境变量/配置中心安全注入
self.APP_ID = '***'
self.API_KEY = '***'
self.SECRET_KEY = '***'
pygame.mixer.init()
self.cache_dir = 'speak_cache'
os.makedirs(self.cache_dir, exist_ok=True)
self.access_token = self.get_access_token()
self.is_playing = False
def get_access_token(self):
# 通过 HTTPS 请求换取 access_token,并在失败时做容错处理
# 返回 None 时系统将自动跳过语音功能,保证核心检测不受影响
try:
# ... 省略网络请求细节与错误处理 ...
return None
except Exception:
return None
def text_to_speech(self, text, force_new=False):
cache_path = self.get_cache_path(text)
if os.path.exists(cache_path) and not force_new:
return cache_path
# ... 省略 TTS 请求与缓存写入逻辑 ...
return None
def play_audio(self, text):
if self.is_playing:
pygame.mixer.music.stop()
audio_path = self.text_to_speech(text)
if audio_path:
pygame.mixer.music.load(audio_path)
pygame.mixer.music.play()
说明:语音播报能有效提升操作便捷性与人机交互体验,但在线 TTS 依赖第三方服务与鉴权。为避免秘钥泄露风险,本项目在展示时隐藏了 APP_ID/API_KEY/SECRET_KEY,并建议在实际部署中采用环境变量或私有配置服务注入的方式管理敏感信息。同时,模块通过缓存策略减少重复调用,并在 access_token 获取失败或网络异常时进行容错处理,使语音功能“可用则用,不可用则自动降级”,不影响核心检测流程。播放器部分采用 pygame.mixer,配合非阻塞等待,可与检测线程并行工作,不阻塞 UI 主线程。此设计既保障了安全合规,也兼顾了体验与稳定性。
7. 重难点与创新点
本项目在工程实现与业务落地中面临的关键难点主要包括:多源异步处理、中文可视化与国际化、性能与精度的权衡、数据闭环与追溯、以及对复杂缺陷形态的鲁棒识别。围绕这些难点,本项目在设计上采取了若干工程化创新与实践策略。
(1)多源与多线程的协同与稳定性
视频与摄像头检测均为持续数据流,若与 UI 主线程耦合,极易造成界面卡顿或假死。项目通过 QThread 将推理与 I/O 从 UI 分离,并以信号槽实现跨线程通信,确保在高帧率下仍保持流畅交互。同时提供“暂停/继续/停止”等控制,保证长时间运行时的可控性与资源释放(显式释放摄像头/视频句柄、断开信号等),减少内存泄漏与资源竞争风险。
(2)中文可视化与人机交互优化
工业一线的操作人员对中文呈现有强需求,尤其在繁忙的流水线下,需要“看得懂、看得快”。本项目使用 Pillow 绘制中文,配合宋体与背景色块,提升可读性。语音播报进一步降低了“盯屏”成本,使操作员可以在不时刻注视显示器的情况下通过听觉获得关键信息,有助于减少错过异常的概率。
(3)精度—速度—资源的工程权衡
不同设备(工作站、边缘设备)与不同场景(在线/离线、单路/多路)对速度与精度的要求不同。项目提供 YOLOv8/v10/v11 的多模型对比,并把阈值、显示、保存、统计策略参数化,便于在不同部署环境下快速做“以用促研”的选择与优化。对实时性敏感的场合,可选择延迟更低的模型版本并关闭部分耗时的保存或可视化开关;对精度敏感的场合,则选择综合性能更优的版本并加强数据增强与模型训练时长。
(4)数据闭环与可追溯性
通过将检测历史(时间、类型、帧统计、用时)与检测结果(类别、置信度、帧号)入库,系统支持按日期范围检索与详情查看;配合每帧保存的图像和文本,形成“可复盘”的证据链。此闭环保障了工程管理需求,如质控追踪、班组绩效评估、供应商比对等,同时也为算法持续优化提供了有价值的样本池与统计依据。
(5)复杂缺陷与类间混淆
木材表面纹理复杂且变化多端,不同类别之间存在相似性(如活结与死结的边界、裂缝与纹理裂隙的混淆)。项目利用混淆矩阵、P-R 曲线等指标辅助分析,并建议采用难例挖掘与重采样策略改进。此外,可通过阈值分级(高置信度自动通过、边界样本进入人工复核)实现“人机协同”,在不牺牲整体效率的情况下,显著降低关键误判的风险。
(6)工程可扩展性与可维护性
系统在配置与模块化上做了大量工程化考量:模型路径、保存目录、数据库连接、中文标签与说明、是否清理历史等均集中在配置中统一管理;UI、推理、绘制、存储、可视化分析等模块相对解耦,便于替换与扩展(如后续新增分割任务或关键点检测)。这为不同团队成员(算法、前端、后端、QA)协作提供了清晰边界。
(7)创新点概述
- 中文友好可视化与播报,显著降低使用门槛与学习成本;
- 按帧粒度的结果保存与信息文本化,提升可追溯性与复盘便捷性;
- 面向工业的“实时性优先”设计与多模型对比,支撑不同业务诉求下的快速决策;
- 数据闭环(数据库+可视化),在“检测—管理—分析—优化”链路上形成良性循环;
- 线程化与容错设计,确保长时间运行稳定,语音模块可用则启、不可用则降级不影响核心流程。
8. 算法对比介绍
为客观评估不同版本 YOLO 在本木材缺陷数据集上的表现,项目提供了 runs/yolov8_train_out/、runs/yolov10_train_out/、runs/yolov11_train_out/ 等训练输出目录及“算法对比结果”目录(runs/算法对比结果/)。下表依据 对比结果数据.csv 提供的统计指标进行整理:
| 模型 | mAP@0.5 | mAP@0.5:0.95 | Precision | Recall | 训练耗时(s) | 相对 YOLOv8 的 mAP@0.5 改进(%) | 相对 YOLOv8 的 mAP@0.5:0.95 改进(%) | 相对 YOLOv8 的 Precision 改进(%) | 相对 YOLOv8 的 Recall 改进(%) |
|---|---|---|---|---|---|---|---|---|---|
| YOLOv8 | 0.8034 | 0.48231 | 0.78296 | 0.79681 | 3000.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| YOLOv10 | 0.7560 | 0.43692 | 0.69656 | 0.77221 | 3000.00 | -5.90 | -9.41 | -11.04 | -3.09 |
| YOLOv11 | 0.80891 | 0.48264 | 0.79321 | 0.78232 | 3082.57 | +0.69 | +0.07 | +1.31 | -1.82 |
从表中可见,YOLOv11 在本数据集上相较 YOLOv8 的 mAP 指标略有提升(mAP@0.5 +0.69%、mAP@0.5:0.95 +0.07%),Precision 也有细微优势(+1.31%),但 Recall 略低(-1.82%)。与之对比,YOLOv10 在该数据上并未展现出精度优势,多个指标较 YOLOv8 有所下降,但其工程定位更偏向时延优化,可能在边缘设备或低算力环境中展现价值。
深入解读需结合 runs/算法对比结果 目录下的多张图表:
-
图1_收敛性分析.png:
- 该图呈现模型在训练过程中的损失曲线(如训练/验证损失)与/或指标曲线(如 mAP、P、R)。若曲线平滑且在一定轮次后趋于稳定,说明训练收敛良好;若存在震荡或过早饱和,则可能存在学习率设定、数据噪声或增强策略不匹配等问题。对比三者,若 YOLOv11 的验证曲线在后期更平稳,意味着其在本数据的泛化趋于稳定。

- 该图呈现模型在训练过程中的损失曲线(如训练/验证损失)与/或指标曲线(如 mAP、P、R)。若曲线平滑且在一定轮次后趋于稳定,说明训练收敛良好;若存在震荡或过早饱和,则可能存在学习率设定、数据噪声或增强策略不匹配等问题。对比三者,若 YOLOv11 的验证曲线在后期更平稳,意味着其在本数据的泛化趋于稳定。
-
图2_性能雷达图.png:
- 雷达图直观展示多个维度(如 mAP、Precision、Recall、推理延迟、参数量、吞吐量等综合维度)的相对表现。若 YOLOv11 的多项指标覆盖面积更大或更均衡,说明其在综合能力上更适合追求平衡的生产环境;YOLOv10 若在延迟维度更突出,则在实时性优先的设备上更有吸引力。

- 雷达图直观展示多个维度(如 mAP、Precision、Recall、推理延迟、参数量、吞吐量等综合维度)的相对表现。若 YOLOv11 的多项指标覆盖面积更大或更均衡,说明其在综合能力上更适合追求平衡的生产环境;YOLOv10 若在延迟维度更突出,则在实时性优先的设备上更有吸引力。
-
图3_改进热力图.png:
- 该图用于标注各模型/各类指标相较基准(YOLOv8)的改进幅度,颜色越“暖”代表提升越大,越“冷”代表退化。通过热力图可一眼看出某模型在哪些指标/类别上有优势,从而指导后续针对性的数据增强与结构微调。

- 该图用于标注各模型/各类指标相较基准(YOLOv8)的改进幅度,颜色越“暖”代表提升越大,越“冷”代表退化。通过热力图可一眼看出某模型在哪些指标/类别上有优势,从而指导后续针对性的数据增强与结构微调。
-
图4_训练效率对比.png:
- 展示训练时间、吞吐或 GPU 占用等效率指标。虽然 YOLOv10 在本次指标表中未领先,但其工程定位可能在“单位时间训练迭代更多、部署延迟更低”上具备优势,具体需结合实际硬件与 batch 设定验证。

- 展示训练时间、吞吐或 GPU 占用等效率指标。虽然 YOLOv10 在本次指标表中未领先,但其工程定位可能在“单位时间训练迭代更多、部署延迟更低”上具备优势,具体需结合实际硬件与 batch 设定验证。
-
训练曲线对比图.png / 指标柱状图对比.png / 性能对比表格.png 等:
-

- 这些图表从不同角度强化同样的信息结构:整体精度、定位精细度、分类准确度、召回能力,以及不同模型间的差值比较。对于工程决策者而言,雷达图和柱状图直观易懂,而训练曲线与混淆矩阵则更适合算法工程师定位问题与优化方向。
结合本数据集特性(四类缺陷、纹理复杂、样本规模中等),我们可以给出如下工程建议:
-
若目标设备算力充足,且希望在不显著增加时延的情况下获得更稳定的综合表现,可优先选择 YOLOv11 作为默认模型;配合适度的阈值与后处理调参,进一步提升召回指标(例如降低阈值、引入软 NMS 等)。
-
若部署环境资源受限,需要更低的推理延迟与更高的吞吐,可测试 YOLOv10 在目标设备上的真实时延表现(包括不同 batch、不同精度模式如 FP16/INT8 等),同时做精度补救(加强数据增强、增加训练轮次、针对性难例采样等)。
-
若追求实现难度最低与成熟度,YOLOv8 仍是稳妥选择。其生态成熟、资料丰富,便于快速上线与维护。在需要时可通过迁移学习将 YOLOv8 的权重迁移到 v10/v11 结构,减少冷启动成本。
-
指标解读与业务策略耦合:
- 在高价值缺陷(如严重裂缝或结构性缺陷)场景中,应优先减少漏检(提升 Recall),可以接受一定的误检上升;
- 在低风险缺陷或非关键工序中,可适度提升 Precision 以减少误报带来的人工复核成本;
- 通过“分级处置”策略(高置信度自动判定、边界样本进入人工复核)实现人机协同,平衡总体成本与风险。
-
收敛性与过拟合观察:
- 若某模型的训练损失快速下降但验证性能不升反降,可能存在过拟合;建议增加正则化、加大增强或采用早停策略;
- 若曲线整体收敛缓慢,可调大学习率 warmup、调整优化器(如 SGD/AdamW)与梯度裁剪;
- 对于木材这类纹理主导的图像,加入颜色/亮度抖动与几何增强常有帮助。
-
类间混淆的针对性改进:
- 借助混淆矩阵识别高混淆对(如活结 vs 死结、裂缝 vs 纹理裂隙),从数据标注规范、样本均衡与模型损失权重等方面着手;
- 适度引入“困难样本挖掘”(hard example mining),对经常被误判的样本进行增量训练;
- 若业务允许,可引入第二阶段规则(基于几何/纹理统计)对低置信度样本进行二次校验。
总的来说,本项目的对比结果显示 YOLOv11 在综合指标上略优于 YOLOv8,而 YOLOv10 的潜在优势需要在“低延迟场景”中进一步验证。决策时应结合设备条件、质检策略与运维成本,选择最适合的模型版本,并以数据闭环与迭代优化为抓手,持续提升系统效果。
9. 下载链接

如您需获取博文中提及的全部实现资源(包括测试图片与视频、Python 与界面代码、训练数据、训练脚本、算法对比图报告等),已将完整工程打包并上传至面包多资源平台。下载包内包含:示例数据、可直接运行的脚本/代码文件、运行教程等。
项目完整工程文件下载请查看下方演示视频或关注文末博主名片。
✅点击跳转至文末所有涉及的完整视频和代码文件下载页✅
基于YOLOv8v10v11深度学习的4种木材木头木料缺陷智能检测与识别系统(含Python源码、PyQt5界面、数据集与训练代码)
10. 总结
本项目围绕“木材缺陷识别”的真实工业需求,从数据组织、模型训练、工程实现到可视化分析与人机交互,构建了一套完整、可落地的解决方案。系统支持图片/视频/摄像头多源输入,提供中文化可视化与语音播报,检测结果与明细入库,配合图表分析与历史检索,覆盖了质检闭环的关键环节。通过YOLOv8/YOLOv10/YOLOv11 的系统对比,结合多维图表与指标,帮助研发与业务方在“精度—速度—成本”之间做出更契合场景的选择。与此同时,项目在工程细节上强调稳定性与可维护性:线程化设计确保长时运行流畅;容错与降级机制保证在网络或服务不可用时核心功能不受影响;集中配置与模块化代码结构便于扩展新能力,如增加新缺陷类别、接入新模型或引入分割与关键点任务。
面向未来,建议围绕以下方向持续演进:1)数据迭代闭环,建立难例库与主动学习机制,持续改善边界样本上的表现;2)部署优化,针对边缘设备进行量化、裁剪与蒸馏,进一步降低时延与能耗;3)多模态融合,结合深度图、近红外或超声等信息,提升在疑难缺陷与隐蔽缺陷上的识别能力;4)更丰富的运维工具,如在线监控、模型回退、AB 测试与灰度发布;5)与 MES/ERP 的对接,打通制造执行与供应链管理的数据链路,释放更大的业务价值。凭借稳健的工程底座与清晰的演进路径,本项目可作为木材行业 AI 质检的起点与样板,也可迁移到板材、石材、陶瓷等相近领域,为“AI+制造”提供可复用的方法论与工具箱。
最后
以上内容为博主对该项目的整理与实践总结,难免有疏漏或理解不周之处;若您发现错误、遗漏或更好的实现方式,欢迎指出与讨论,博主会虚心学习并在后续更新中予以修正。写作与工程实践都不容易,若这篇文章对您有帮助,欢迎点赞、收藏或转发,这将是对博主继续创作最大的鼓励。感谢阅读与支持。
[1] Redmon J, Divvala S, Girshick R, Farhadi A. You Only Look Once: Unified, Real-Time Object Detection[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR). 2016: 779–788.
[2] Redmon J, Farhadi A. YOLOv3: An Incremental Improvement[EB/OL]. arXiv:1804.02767, 2018. (访问日期: 2025-09-26)
[3] Bochkovskiy A, Wang CY, Liao HYM. YOLOv4: Optimal Speed and Accuracy of Object Detection[EB/OL]. arXiv:2004.10934, 2020. (访问日期: 2025-09-26)
[4] Lin TY, Maire M, Belongie S, et al. Microsoft COCO: Common Objects in Context[C]//European Conference on Computer Vision (ECCV). 2014: 740–755.
[5] Ultralytics. YOLOv8 Docs[EB/OL]. https://docs.ultralytics.com/ (访问日期: 2025-09-26)
[6] Wang C-Y, et al. YOLOv10: Real-Time End-to-End Object Detection[EB/OL]. arXiv:2405.14458, 2024. (访问日期: 2025-09-26)
[7] OpenCV Team. OpenCV Documentation[EB/OL]. https://docs.opencv.org/ (访问日期: 2025-09-26)
[8] Paszke A, et al. PyTorch: An Imperative Style, High-Performance Deep Learning Library[C]//NeurIPS. 2019: 8026–8037.

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 5
5 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)