乐聚机器人开源程序kuavo-rl-opensource/kuavo-robot-train配置流程
我的环境:ubuntu20.04 + nvidia驱动570.133.07 + cuda12.1。
·
我的环境:
ubuntu20.04 + nvidia驱动570.133.07 + cuda12.1
参考官网readme:https://gitee.com/leju-robot/kuavo-rl-opensource/blob/master/kuavo-robot-train/README.md
目录
1、安装miniconda3
#安装
mkdir -p ~/miniconda3
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.sh -O ~/miniconda3/miniconda.sh
bash ~/miniconda3/miniconda.sh -b -u -p ~/miniconda3
rm ~/miniconda3/miniconda.sh
#初始化
~/miniconda3/bin/conda init --all
source ~/.bashrc2、安装isaac gym
wget https://developer.nvidia.com/isaac-gym-preview-4
tar -xvzf isaac-gym-preview-4 #将名字改为 isaacgym 并存放在'kuavo-robot-train'同级目录下3、创建train的conda环境
conda create -n humanoid-gym-op python=3.8
conda activate humanoid-gym-op
cd kuavo-rl-opensource/kuavo-robot-train
pip install -e ../isaacgym/python
#漫长等待
pip install -e .
4、执行训练
#第一次测试,建议并行环境设置小一点512
python scripts/train.py --task=kuavo_s42_sk_ppo --run_name v1 --headless --num_envs 4096
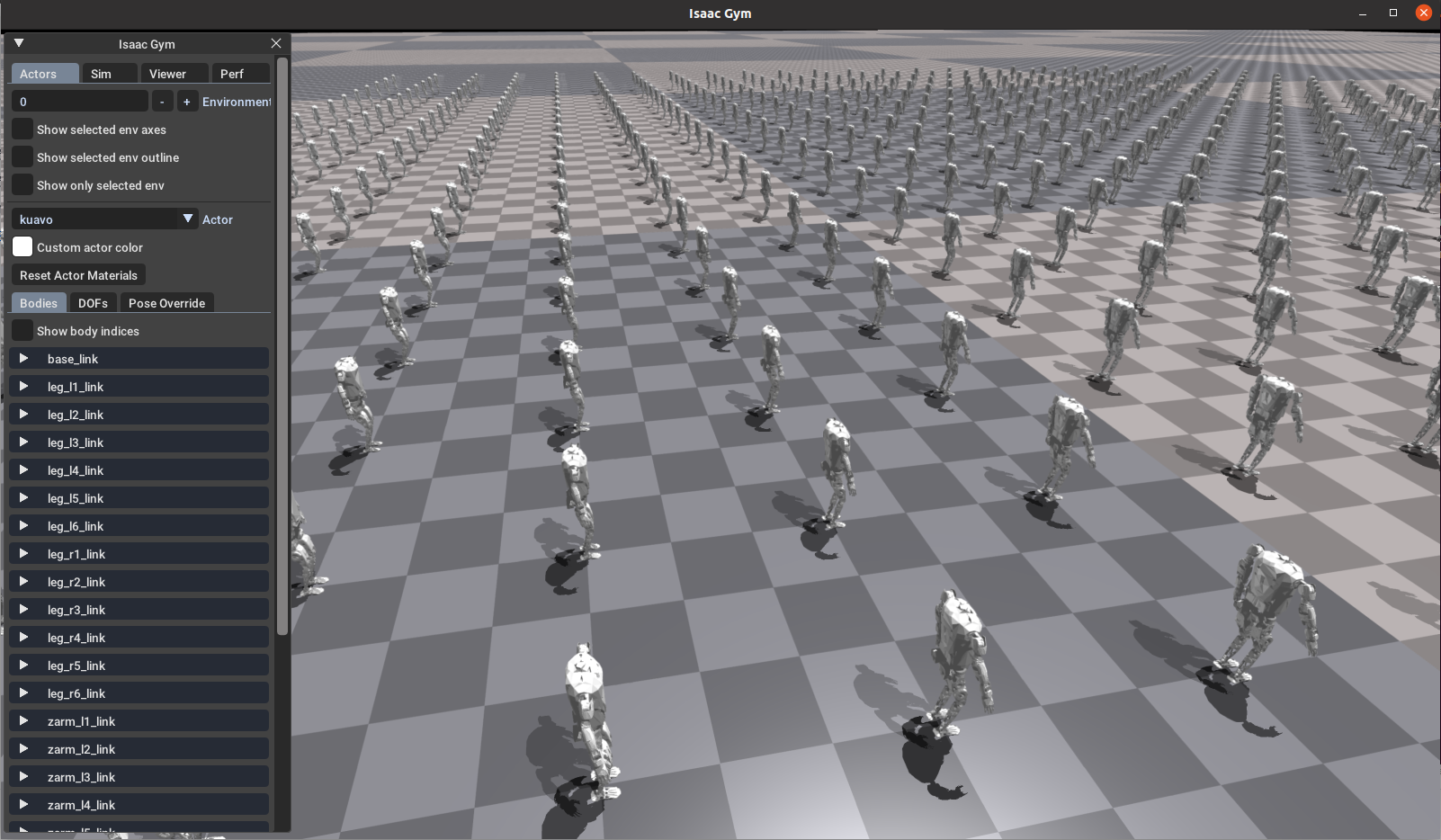
python scripts/play.py --task=kuavo_s42_sk_ppo --run_name v1--headless是无图形化处理,可让训练更快,如果想看isaacgym页面,可以删掉这个参数
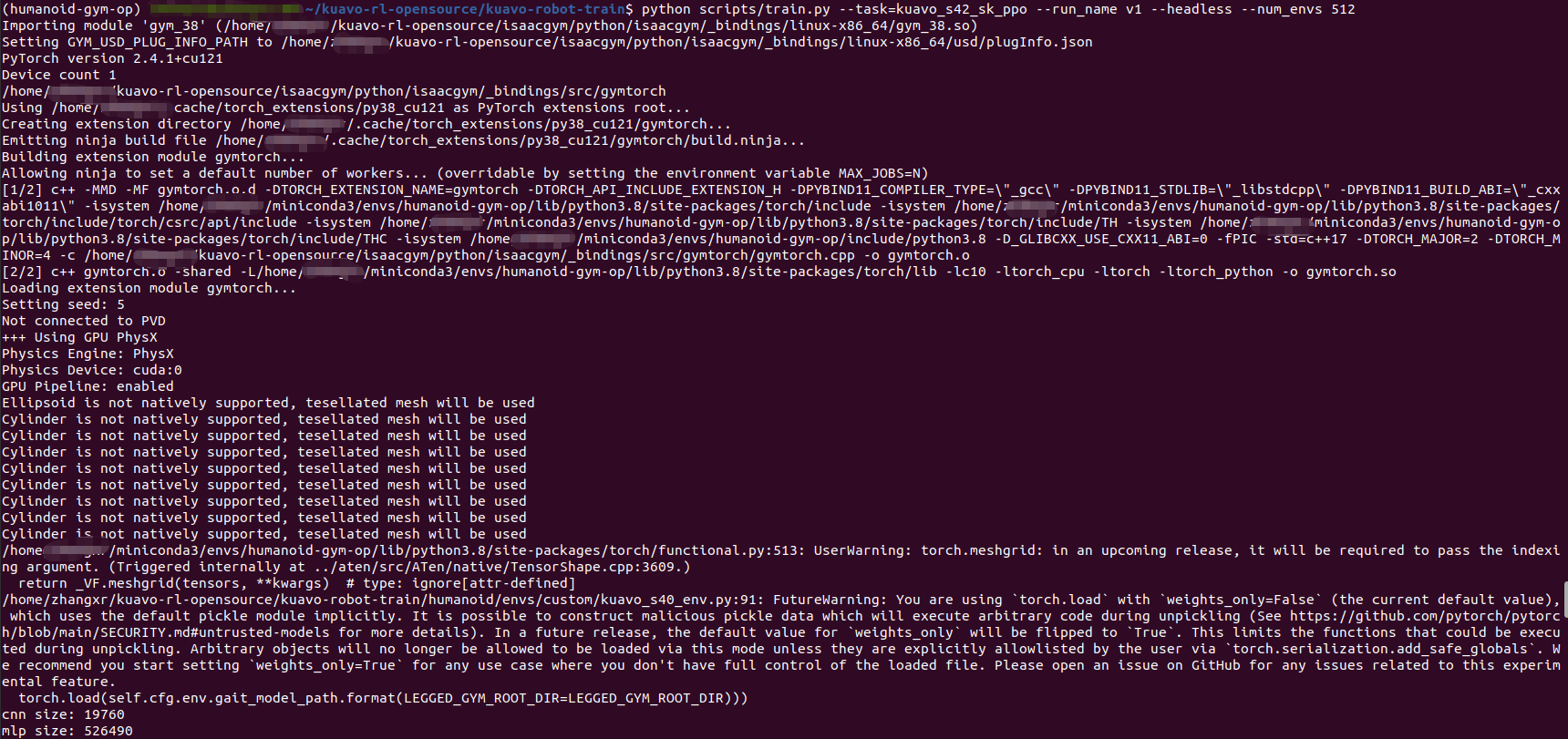
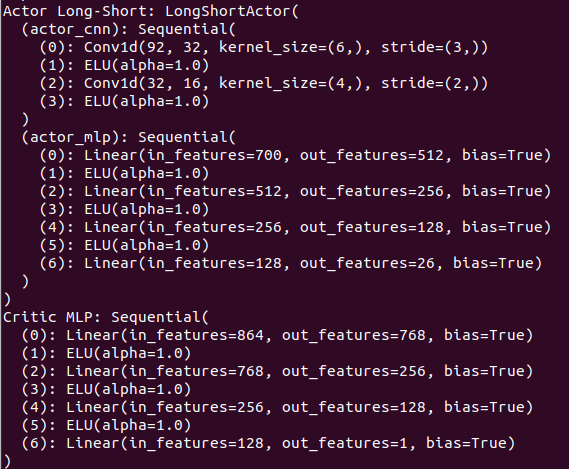
训练开始
按照指定的pt文件继续训练:
python scripts/train.py --task=kuavo_s42_sk_ppo --run_name v1 --headless --num_envs 4096 --resume --load_run Feb07_11-27-10_v1 --checkpoint 0 #该例子表示文件保存在'kuavo-robot-train/logs/Kuavo_s42_sk_ppo/Feb07_11-27-10_v1'目录下,选择了model_0.pt文件进行继续训练,headless选项关闭了GUI显示。
python scripts/play.py --task=kuavo_s42_sk_ppo --run_name v1 --load_run Feb07_11-27-10_v1 --checkpoint 0模型及训练参数都保存在logs中

中国智能体开发者社区,聚焦智能体与大模型开发,提供前沿资讯、实用工具链、开源项目及行业案例。通过技术沙龙、开发者大赛等活动,促进经验交流与协作,助力开发者快速构建创新智能应用。
更多推荐
 5
5 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)