从灵巧手到具身智能:AI如何学会“用手思考“?
从 Unimate 的笨拙示教到 F-TAC Hand的灵巧操作,具身智能的进化史就是人类赋予机器 “身体” 与 “灵魂” 的史诗。当机器人能像人类一样感知、学习、创造,我们不仅在创造工具,更在探索智能的本质。
文章介绍了北京通用人工智能研究院与北京大学联合研发的仿生视触觉灵巧手F-TAC Hand的突破性成果,该灵巧手首次实现了机器人抓取能力与人类水平的量化对齐。文章回顾了具身智能的发展历程,从机械式示教、行为革命、认知融合到大模型革命,指出具身智能的终极目标是实现"类人智能",让机器人通过物理交互建立"具身语义",而非依赖外部预设的符号规则。
01灵巧手新突破
2025 年 6 月 9 日,北京通用人工智能研究院与北京大学联合研发的仿生视触觉灵巧手 F-TAC Hand,登上了国际顶刊《自然・机器智能》。评审委员会评价:“F-TAC Hand 首次实现了机器人抓取能力与人类水平的量化对齐,在精密操作场景中展现出超越传统工业机器人 10 倍以上的适应性。” 这一成果无疑是具身智能发展历程中的一座耀眼里程碑。该灵巧手结合视觉摄像头与触觉传感器的多源数据,构建了 “感知 - 理解 - 执行” 的闭环系统。在抓取不规则形状的电路板时,它能通过视觉识别元件位置,再用触觉探索边缘轮廓,最终以最优化的姿态完成抓取,其智能程度令人惊叹。

F-TAC Hand 如此出色,那具身智能经历了哪些阶段才发展到如今的水平呢?
02具身智能的发展阶段
具身智能的发展源远流长,从萌芽之初到如今的蓬勃发展,大致历经了以下几个关键阶段:
1. 启蒙时代:机械式的示教
1959 年,Unimate 机器人诞生,开创具身智能领域先河。它采用示教再现技术,工人手动操作机械臂完成焊接、搬运等任务演示,磁鼓存储器同步记录动作数据,1961 年应用于通用汽车新泽西州工厂装配线,实现生产自动化,提升效率与精度。

Unimate机器人倒咖啡
20 世纪 70 年代初,人类首个自主移动机器人Shakey 在斯坦福实验室问世,通过打孔卡编程规划路径,但受限于符号主义 AI,其移动效率极低(每米耗时 15 分钟),且无法区分光影与实体障碍。
关键转折:1991 年 Rodney Brooks 提出:传统符号主义 AI 的缺陷在于将「智能」困于抽象符号运算(如 Shakey 依赖预编程地图),而具身智能的本质是「身体与环境的实时互动」——Unimate 的「示教再现」证明机械身体可存储动作经验,Shakey 的「笨拙移动」则暴露了脱离物理交互的智能局限性。
2. 行为革命:从中央控制到分布式智能
1986 年,罗德尼・布鲁克斯提出 “包容架构” 理论,主张智能可通过分层反应式系统涌现,建立 “感知 - 动作” 直连通道,推动 AI 行为主义诞生。
1989 年,Brooks 团队研发的六足机器人 Genghis 验证了 “包容架构”,其每条腿配备独立处理器,遇障碍时相邻腿自动协调步态,打破传统中央控制逻辑。

六足机器人 Genghis
2002 年,iRobot 推出 Roomba 吸尘器,采用随机碰撞策略,依靠底部传感器实时反馈形成螺旋清扫模式,虽无环境地图,却能深入狭窄空间清洁,适用于复杂家居环境。

2002版的Roomba
核心进步:分布式智能改变传统中央控制决策模式,使机器人各节点具备自主反应能力,提升对复杂环境的适应性。
3. 认知融合:身体是认知的延伸
哲学家莫里斯・梅洛-庞蒂提出身体是自我意识形成的重要基础。2004 年,意大利技术研究院启动 iCub 开源项目,2008 年首次发布,定位为 “认知发育类人机器人平台”。
iCub 的认知架构模拟儿童认知发育过程,通过感知系统处理多模态输入,结合内部状态表示、多种学习机制和行为生成模块,形成 “感知 - 行动 - 学习 - 认知” 闭环,使机器人在与物理世界互动中实现身体与认知的融合,突破传统 AI 局限。

核心进步:打破「缸中之脑」模式,让机器人通过身体与世界的互动「自主构建认知模型」,而非依赖人类预设的符号规则(如传统 AI 需提前输入「障碍 = 避开」的指令)。
4. 大模型革命:通用智能的黎明
2022年底,ChatGPT的横空出世,其智能涌现所带来的语言理解、内容生成、逻辑推理等类人智慧的出现以及模型性能显著提升,让我们看到了通向通用人工智能(AGI)的曙光。
然而大语言普遍缺乏关于物理世界交互、运动控制以及物体操控的知识,这使得让大语言模型的能力与真实的物理世界对齐就成了迫在眉睫的工作。
目前,在技术层面,大语言模型正进入多模态时代,能够统一处理包括语言、视觉、触觉、听觉在内的多种感官信息,大量的研究集中在多传感器数据的时空同步与校准技术,发展跨模态学习算法,以及交互式感知、主动感知等技术方向,以实现规模化多模态数据的高效自动对齐。
F-TAC Hand的突破在于它像人类一样,能实时感知接触变化并瞬间调整策略。它模拟人类皮肤布满传感器、大脑高效处理信息的机制,创新性地将17个高分辨率触觉传感器以6种不同配置集成于掌中。
- 视觉语言模型(VLM)作为具身智能模型发展的早期重要阶段,主要聚焦于让机器能够理解视觉信息与语言信息,并建立两者之间的关联。
- 视觉 - 语言 - 动作模型(VLA)的出现,是具身智能模型发展的重要突破,它将视觉感知、语言理解与动作执行有机结合起来。
- 与 VLA 相比,世界模型****是一个真正理解世界3D结构、形状和组合性的 AI 模型,具有更强大的知识整合与推理能力,能够处理更复杂、更抽象的任务,对世界的运行规律有更深入的 “理解”。2024 年9月,李飞飞的初创公司 World Labs陆续发布了「世界生成」模型、Forge 渲染器等工作。
具身智能的终极目标是实现 “类人智能”, 未来研究可能需借鉴具身认知理论,让机器人通过物理交互建立 “具身语义”,而非依赖外部标签。
03结语
从 Unimate 的笨拙示教到 F-TAC Hand的灵巧操作,具身智能的进化史就是人类赋予机器 “身体” 与 “灵魂” 的史诗。当机器人能像人类一样感知、学习、创造,我们不仅在创造工具,更在探索智能的本质。
零基础如何高效学习大模型?
你是否懂 AI,是否具备利用大模型去开发应用能力,是否能够对大模型进行调优,将会是决定自己职业前景的重要参数。
为了帮助大家打破壁垒,快速了解大模型核心技术原理,学习相关大模型技术。从原理出发真正入局大模型。在这里我和鲁为民博士系统梳理大模型学习脉络,这份 LLM大模型资料 分享出来:包括LLM大模型书籍、640套大模型行业报告、LLM大模型学习视频、LLM大模型学习路线、开源大模型学习教程等, 😝有需要的小伙伴,可以 扫描下方二维码免费领取🆓**⬇️⬇️⬇️

【大模型全套视频教程】
教程从当下的市场现状和趋势出发,分析各个岗位人才需求,带你充分了解自身情况,get 到适合自己的 AI 大模型入门学习路线。
从基础的 prompt 工程入手,逐步深入到 Agents,其中更是详细介绍了 LLM 最重要的编程框架 LangChain。最后把微调与预训练进行了对比介绍与分析。
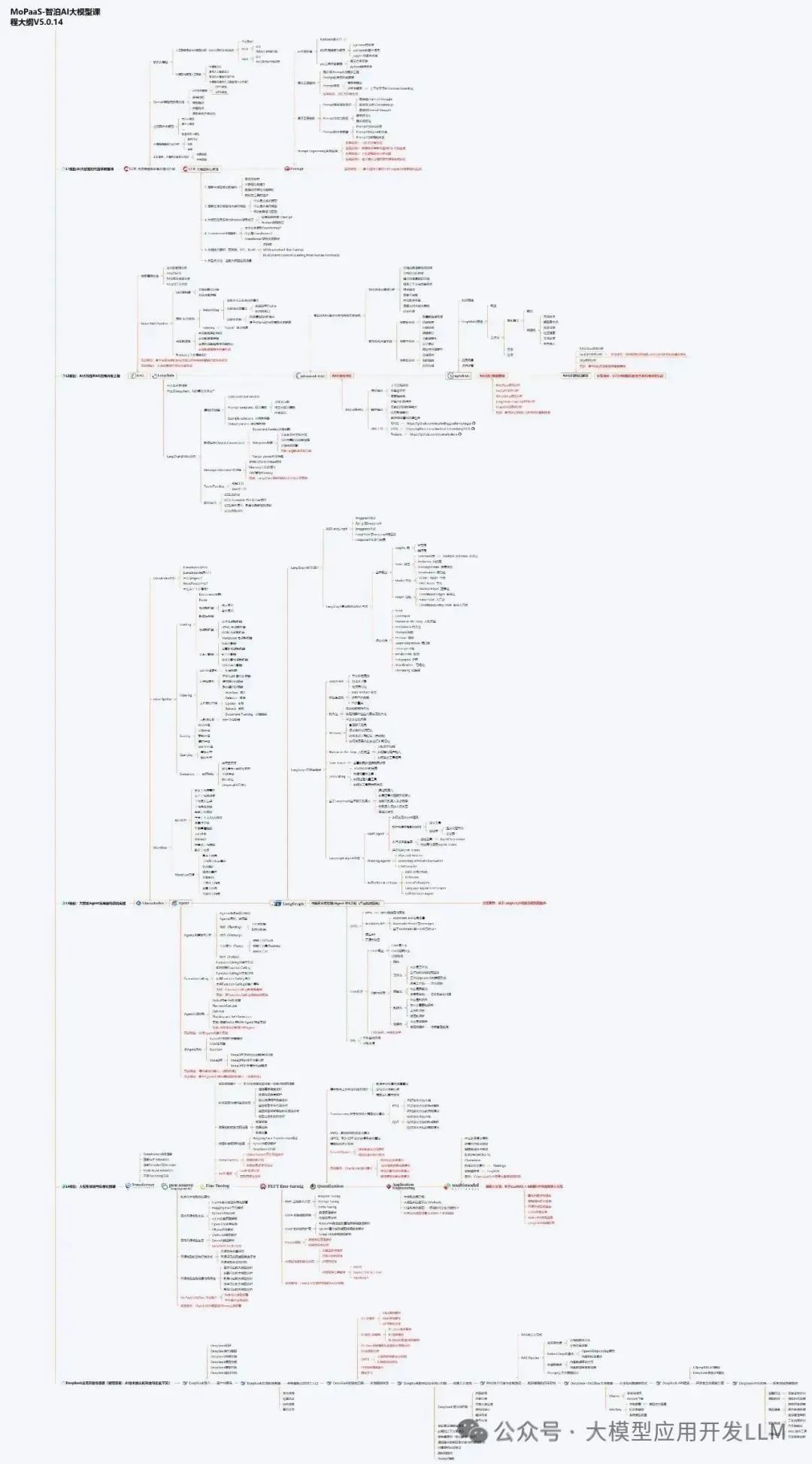
同时课程详细介绍了AI大模型技能图谱知识树,规划属于你自己的大模型学习路线,并且专门提前收集了大家对大模型常见的疑问,集中解答所有疑惑!
深耕 AI 领域技术专家带你快速入门大模型
跟着行业技术专家免费学习的机会非常难得,相信跟着学习下来能够对大模型有更加深刻的认知和理解,也能真正利用起大模型,从而“弯道超车”,实现职业跃迁!
【精选AI大模型权威PDF书籍/教程】
精心筛选的经典与前沿并重的电子书和教程合集,包含《深度学习》等一百多本书籍和讲义精要等材料。绝对是深入理解理论、夯实基础的不二之选。

【AI 大模型面试题 】
除了 AI 入门课程,我还给大家准备了非常全面的**「AI 大模型面试题」,**包括字节、腾讯等一线大厂的 AI 岗面经分享、LLMs、Transformer、RAG 面试真题等,帮你在面试大模型工作中更快一步。
【大厂 AI 岗位面经分享(92份)】
【AI 大模型面试真题(102 道)】
【LLMs 面试真题(97 道)】
【640套 AI 大模型行业研究报告】

【AI大模型完整版学习路线图(2025版)】
明确学习方向,2025年 AI 要学什么,这一张图就够了!
👇👇点击下方卡片链接免费领取全部内容👇👇
抓住AI浪潮,重塑职业未来!
科技行业正处于深刻变革之中。英特尔等巨头近期进行结构性调整,缩减部分传统岗位,同时AI相关技术岗位(尤其是大模型方向)需求激增,已成为不争的事实。具备相关技能的人才在就业市场上正变得炙手可热。
行业趋势洞察:
- 转型加速: 传统IT岗位面临转型压力,拥抱AI技术成为关键。
- 人才争夺战: 拥有3-5年经验、扎实AI技术功底和真实项目经验的工程师,在头部大厂及明星AI企业中的薪资竞争力显著提升(部分核心岗位可达较高水平)。
- 门槛提高: “具备AI项目实操经验”正迅速成为简历筛选的重要标准,预计未来1-2年将成为普遍门槛。
与其观望,不如行动!
面对变革,主动学习、提升技能才是应对之道。掌握AI大模型核心原理、主流应用技术与项目实战经验,是抓住时代机遇、实现职业跃迁的关键一步。
01 为什么分享这份学习资料?
当前,我国在AI大模型领域的高质量人才供给仍显不足,行业亟需更多有志于此的专业力量加入。
因此,我们决定将这份精心整理的AI大模型学习资料,无偿分享给每一位真心渴望进入这个领域、愿意投入学习的伙伴!
我们希望能为你的学习之路提供一份助力。如果在学习过程中遇到技术问题,也欢迎交流探讨,我们乐于分享所知。
*02 这份资料的价值在哪里?*
专业背书,系统构建:
-
本资料由我与鲁为民博士共同整理。鲁博士拥有清华大学学士和美国加州理工学院博士学位,在人工智能领域造诣深厚:
-
- 在IEEE Transactions等顶级学术期刊及国际会议发表论文超过50篇。
- 拥有多项中美发明专利。
- 荣获吴文俊人工智能科学技术奖(中国人工智能领域重要奖项)。
-
目前,我有幸与鲁博士共同进行人工智能相关研究。
内容实用,循序渐进:
-
资料体系化覆盖了从基础概念入门到核心技术进阶的知识点。
-
包含丰富的视频教程与实战项目案例,强调动手实践能力。
-
无论你是初探AI领域的新手,还是已有一定技术基础希望深入大模型的学习者,这份资料都能为你提供系统性的学习路径和宝贵的实践参考,助力你提升技术能力,向大模型相关岗位转型发展。
抓住机遇,开启你的AI学习之旅!

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 9
9 0
0- 0



 已为社区贡献200条内容
已为社区贡献200条内容

所有评论(0)