《人工智能现代方法(第4版)》 第2章 智能体 学习笔记
摘要:智能体是通过传感器感知环境并通过执行器执行动作的系统,其理性决策基于性能度量期望值最大化。PEAS框架(性能、环境、执行器、传感器)是分析任务环境的核心工具。智能体分为四种类型:简单反射型(直接响应感知)、基于模型型(维护内部状态)、基于目标型(显式目标导向)和基于效用型(权衡多个目标)。学习型智能体通过反馈机制改进性能。环境属性(可观测性、动态性等)决定智能体设计策略,理性与全知的关键区别
这是一本关于人工智能的百科全书,堪称人工智能教材的典范。本科时我曾在人工智能课上学过这本书的第3版。很多年过去了,深度学习给世界带来了惊喜,推动了自然语言处理、计算机视觉、机器人学的 快速发展,也为社会带来了伦理、公平性和安全性的新挑战。我很欣喜 地看到第4版引入了这些领域大量最新研究成果。如果你想了解人工智能的全貌,不要错过这本书。
——阿斯顿·张(Aston Zhang) 亚马逊资深科学家
一、智能体的基本概念
1.1 智能体的定义
任何通过传感器(sensor)感知环境(environment)并通过执行器 (actuator)作用于该环境的事物都可以被视为智能体(agent)。
智能体 = 通过传感器感知环境 + 通过执行器执行动作的系统1.2 智能体与环境交互模型

关键理解:智能体程序是"大脑",传感器和执行器是"身体"。
二、理性智能体理论
2.1 理性定义
理性智能体应选择最大化性能度量期望值的动作。
2.2 理性依赖的四个要素
- 性能度量:评估成功程度的标准
- 先验知识:对环境规律的了解
- 可用动作:能够执行的操作集合
- 感知历史:迄今为止的所有感知信息
2.3 理性 vs 全知 vs 完美
| 概念 | 含义 | 现实性 |
|---|---|---|
| 理性 | 基于可用信息最优决策 | 可实现 |
| 全知 | 知道所有实际结果 | 不可能 |
| 完美 | 实际表现最优 | 依赖运气 |
2.4 信息收集的价值
理性智能体会主动采取行动获取更多信息(如检查路况后再过马路),因为更好的信息能带来更好的决策。
三、任务环境分类(PEAS框架)
3.1 PEAS描述框架
| 组件 | 含义 | 示例(自动驾驶出租车) |
|---|---|---|
| P | 性能度量 | 安全、效率、舒适度、利润 |
| E | 环境 | 道路、交通、天气、行人 |
| A | 执行器 | 方向盘、油门、刹车、显示屏 |
| S | 传感器 | 摄像头、雷达、GPS、速度表 |
3.2 环境属性维度
graph TD
A[环境属性] --> B[可观测性]
A --> C[智能体数量]
A --> D[决策时序]
A --> E[动态性]
A --> F[离散性]
A --> G[知识完整性]
B --> B1[完全可观测]
B --> B2[部分可观测]
C --> C1[单智能体]
C --> C2[多智能体]
D --> D1[回合式]
D --> D2[序贯式]详细分类表:
| 属性维度 | 类型1 | 类型2 | 示例 |
|---|---|---|---|
| 可观测性 | 完全可观测 | 部分可观测 | 象棋 vs 扑克 |
| 智能体数量 | 单智能体 | 多智能体 | crossword拼图 vs 围棋 |
| 决策时序 | 回合式 | 序贯式 | 质检 vs 自动驾驶 |
| 动态性 | 静态 | 动态 | 已发牌 vs 实时交易 |
| 离散性 | 离散 | 连续 | 棋盘游戏 vs 机器人控制 |
| 知识完整性 | 已知 | 未知 | 规则明确的游戏 vs 探索新环境 |
四、智能体类型与结构
4.1 智能体程序架构
人工智能的工作是设计一个智能体程序(agent program) 实现智能体函数,即从感知到动作的映射。假设该程序将运行在某种具有物理传感器和执行器的计算设备上,我们称之为智能体架构(agent architecture)。
智能体 = 架构(硬件平台) + 程序(决策逻辑)4.2 四种基本智能体类型
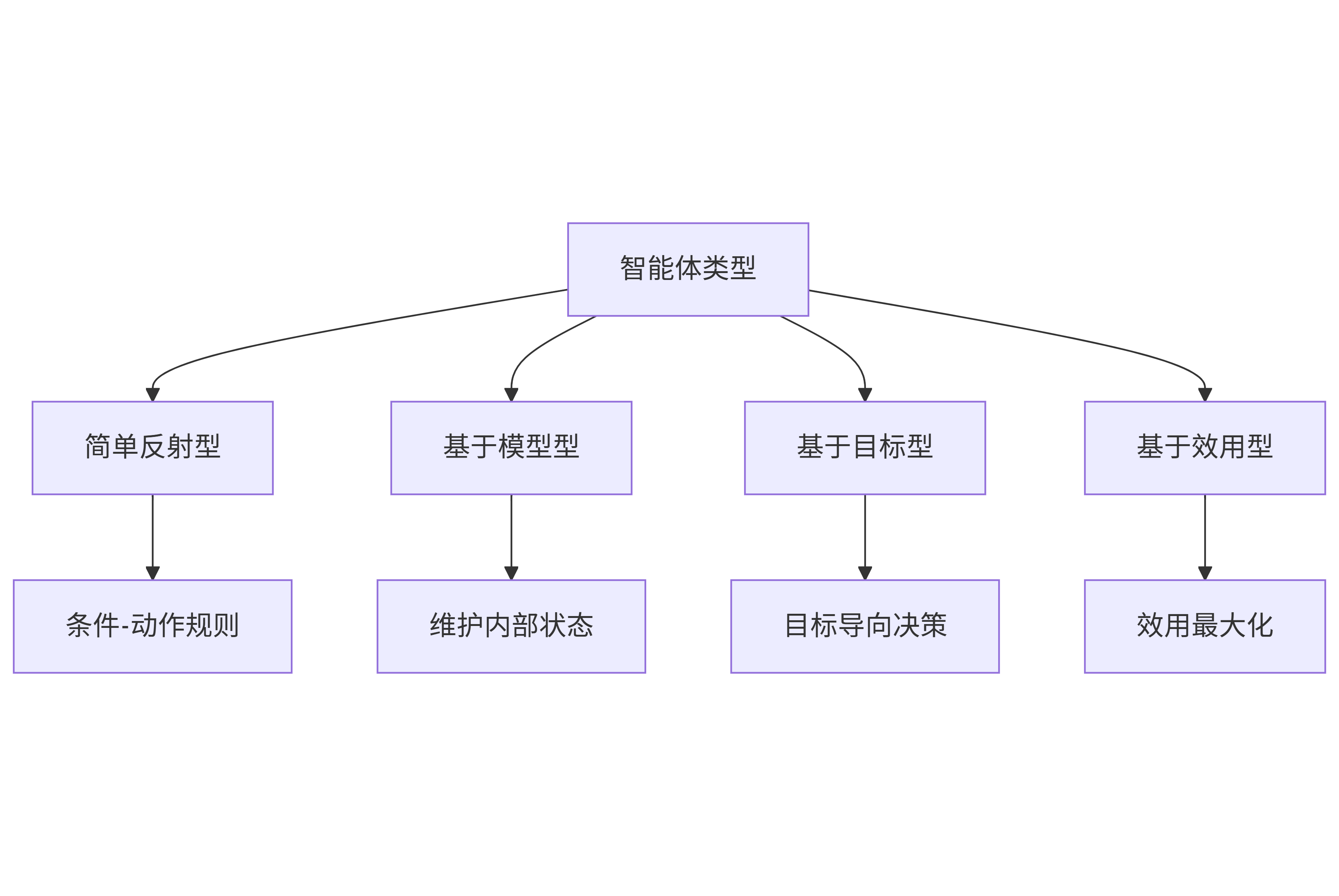
4.2.1 简单反射型智能体
- 原理:直接根据当前感知选择动作
- 结构:条件-动作规则(if-then)
- 优点:简单快速
- 缺点:无法处理部分可观测环境
- 示例:看到红灯就刹车
4.2.2 基于模型的反射型智能体
- 核心增强:维护内部状态追踪世界
- 关键组件:
- 转移模型:动作如何改变世界
- 传感器模型:感知如何反映世界状态
- 优势:能处理部分可观测性
4.2.3 基于目标的智能体
- 核心特征:具有显式目标信息
- 决策方式:评估动作是否能实现目标
- 优势:更灵活,目标改变即可适应新任务
4.2.4 基于效用的智能体
- 核心特征:具有效用函数评估状态好坏
- 决策方式:最大化期望效用
- 适用场景:
- 多个目标需要权衡
- 目标有不同实现方式需要选择
- 不确定性环境下决策
4.3 智能体类型对比表
| 类型 | 关键信息 | 优点 | 局限性 |
|---|---|---|---|
| 简单反射型 | 当前感知 | 简单高效 | 无法处理部分可观测性 |
| 基于模型型 | 内部状态 | 处理部分可观测 | 可能模型不准确 |
| 基于目标型 | 目标状态 | 灵活适应 | 无法权衡多个目标 |
| 基于效用型 | 效用函数 | 最优决策 | 效用函数难设计 |
五、学习型智能体
5.1 学习组件架构

5.2 各组件功能
- 性能元件:负责决策和行动(前四类智能体)
- 学习元件:根据反馈改进性能元件
- 评价器:提供性能反馈信号
- 问题生成器:建议探索性行动获取新经验
5.3 学习内容
智能体可以学习改进:
- 条件-动作规则(反射组件)
- 转移模型和传感器模型(世界知识)
- 效用函数(偏好信息)
六、关键概念总结
6.1 核心术语
- 智能体:任何能感知环境并执行行动的系统
- 理性:基于可用信息最大化性能期望值
- PEAS:描述任务环境的框架
- 可观测性:智能体能获得的环境信息完整性
- 自主性:智能体通过学习适应新环境的能力
6.2 重要区别
- 智能体函数 vs 智能体程序:数学描述 vs 具体实现
- 理性 vs 全知:现实可行 vs 理想化假设
- 性能度量 vs 效用函数:外部评价标准 vs 内部偏好表示
6.3 设计启示
- 任务环境分析是智能体设计的第一步
- 环境属性决定合适的智能体类型
- 学习能力是实现真正自主性的关键
- 效用函数设计需要谨慎避免意外后果
🎯 第2章核心要点
- 智能体是AI研究的基本单元,通过感知-行动循环与环境交互
- 理性是智能体设计的核心标准,强调基于可用信息的最优决策
- 任务环境分析(PEAS) 是智能体设计的关键前提
- 四类智能体结构呈现了从简单到复杂的演进路径
- 学习能力使智能体能够适应未知环境和改进性能
下一章预告:第3章将深入探讨智能体如何通过搜索算法在复杂环境中解决问题。
第2章 智能体 - 复习测试题
第一部分:基础概念选择题
1. 智能体的核心定义是:
A. 能够思考的计算机程序
B. 通过传感器感知环境并通过执行器执行动作的系统
C. 能够通过图灵测试的机器
D. 具有人类级别智能的实体
2. 理性智能体的决策基础是:
A. 模仿人类决策过程
B. 基于所有可能信息的完美决策
C. 最大化性能度量的期望值
D. 遵循预设的规则集合
3. PEAS描述框架中,"环境"指的是:
A. 智能体运行的操作系统
B. 智能体所在的物理位置
C. 影响智能体感知和受智能体动作影响的世界部分
D. 智能体的内部状态集合
4. 简单反射型智能体的主要局限性是:
A. 决策速度太慢
B. 无法处理部分可观测环境
C. 需要大量计算资源
D. 不能学习新知识
5. 基于效用的智能体相比基于目标的智能体的主要优势是:
A. 决策更快速
B. 能够处理多个竞争性目标
C. 更容易编程实现 D. 不需要环境模型
第二部分:概念辨析与填空题
6. 完成智能体类型对比表:
| 智能体类型 | 核心决策依据 | 适用环境特征 | 典型示例 |
|---|---|---|---|
| 简单反射型 | 完全可观测 | ||
| 基于模型型 | 内部状态模型 | 自动驾驶车辆 | |
| 基于目标型 | 目标明确但路径复杂 | ||
| 基于效用型 | 效用函数 | 需要权衡多个目标 |
7. 理性 vs 全知辨析
- 理性智能体基于______做出决策,追求______最优
- 全知智能体知道______,但现实中______
- 举例说明:在医疗诊断中,理性表现为______,全知意味着______
答案要点与评分标准
选择题答案
- B(智能体的正确定义)
- C(理性的核心是期望值最大化)
- C(环境的准确定义)
- B(简单反射型的本质局限)
- B(效用智能体的核心优势)
概念辨析题评分标准
第6题(每空1分,共8分):
- 简单反射型:当前感知 / 规则明确的简单环境 / 自动门禁系统
- 基于模型型:部分可观测、动态环境
- 基于目标型:显式目标状态 / 路径规划机器人
- 基于效用型:医疗诊断系统
第7题(每空1分,共4分):
- 可用信息 / 期望 / 所有实际结果 / 不可能实现
- 基于症状和检验结果诊断 / 知道确切病因和最佳治疗方案

中国智能体开发者社区,聚焦智能体与大模型开发,提供前沿资讯、实用工具链、开源项目及行业案例。通过技术沙龙、开发者大赛等活动,促进经验交流与协作,助力开发者快速构建创新智能应用。
更多推荐
 32
32 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)