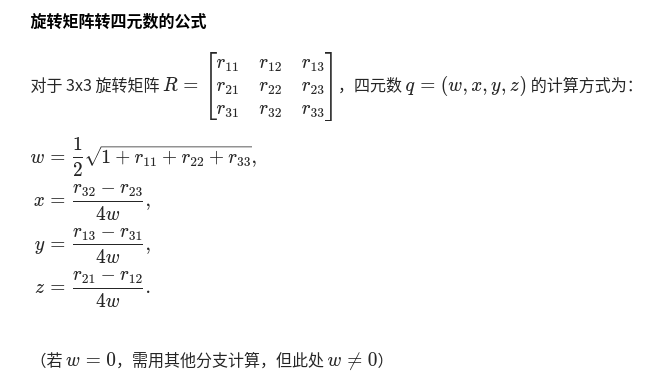
SLAM中的非线性优-3D图优化之四元数在Opencv-PNP中的应用(五)
本文补充介绍了四元数表示位姿的方法,重点讨论了如何利用视觉3D到2D重投影误差构建残差函数并计算雅可比矩阵。相比轴角和李群李代数参数化,四元数提供了一种有效的位姿表示方式,可用于优化相机姿态估计中的重投影误差。文章内容涉及位姿参数化的不同方法及其在视觉SLAM中的应用,特别是基于重投影误差的优化计算过程。
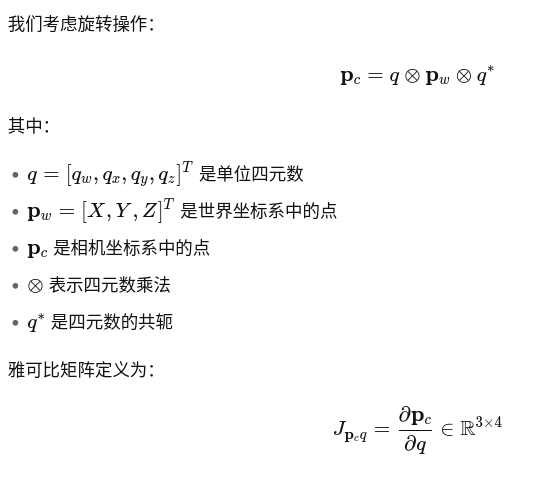
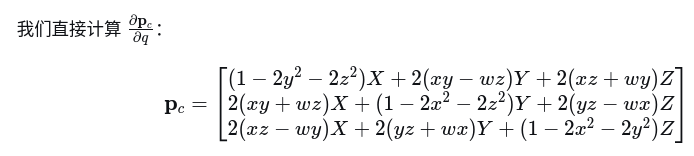
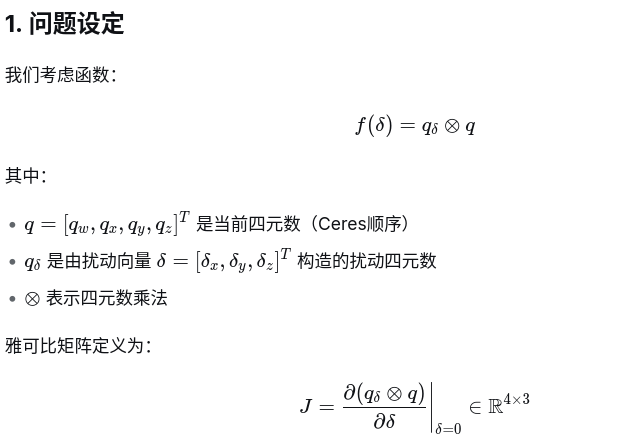
之前章节总结了轴角以及李群李代数参数化,简单介绍了下四元数参数化,本节补充下四元数表示的位姿,如何利用视觉3D到2D重投影误差的残差及雅可比,完整代码如下






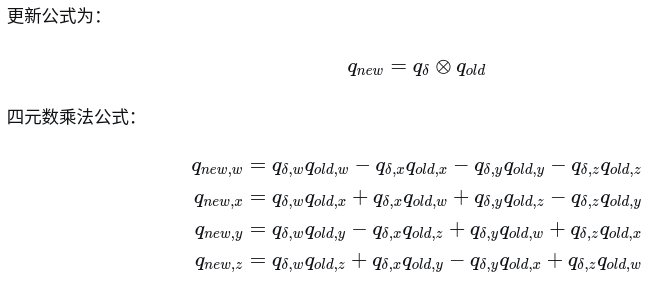
上述旋转点的公式展开为如下
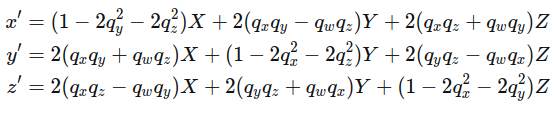
由公式可得,注意这里的符号略微不同,但不影响结果


![]()
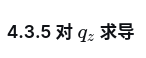
注意这个是一个3x4的矩阵

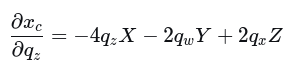
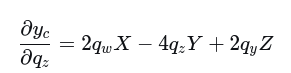
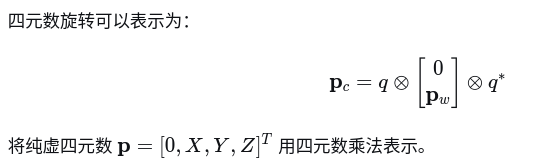
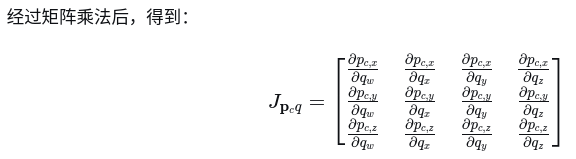
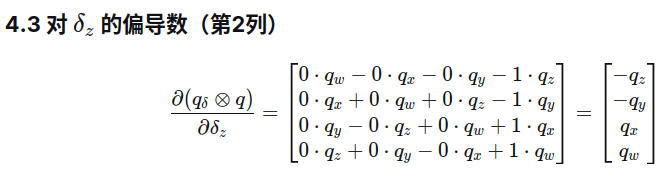
再来推导下方法二的雅可比:点坐标相对于四元数的雅可比矩阵
![]()
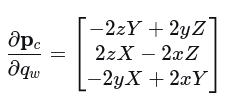
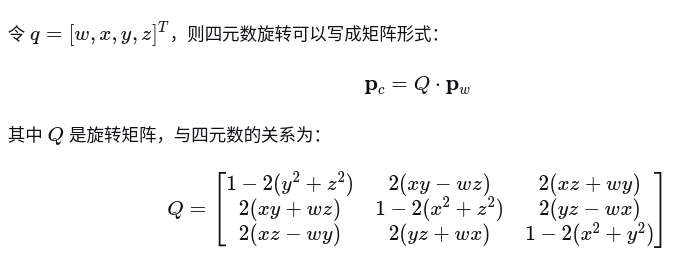
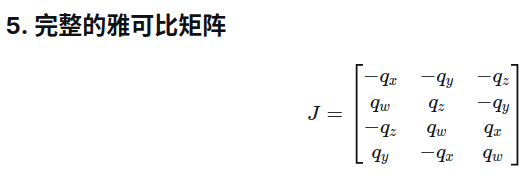
简单重排下
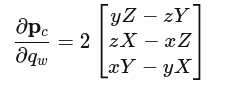
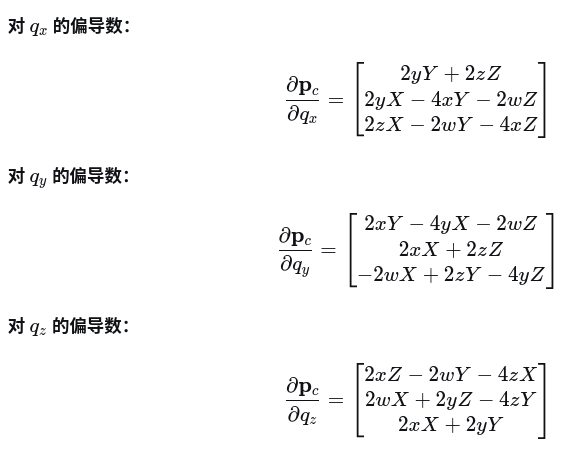
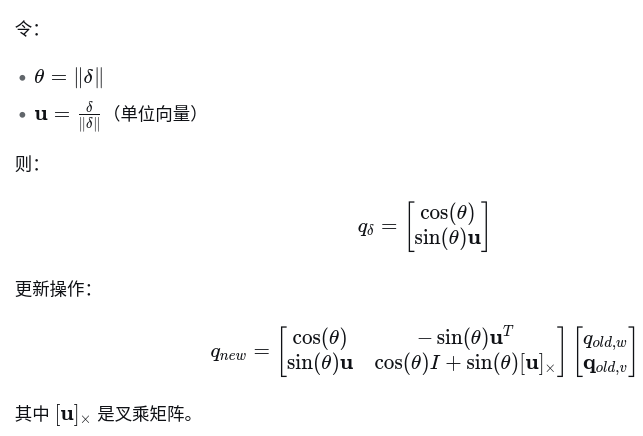
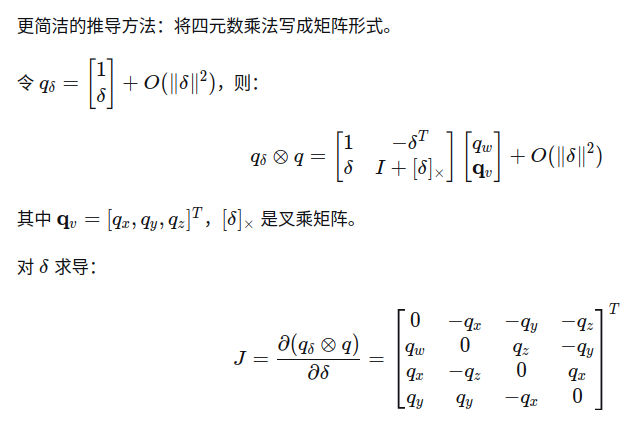
代码使用了更简洁的方法。首先构造一个中间矩阵:
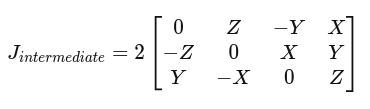

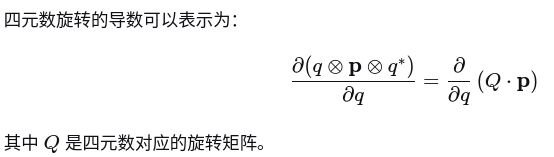
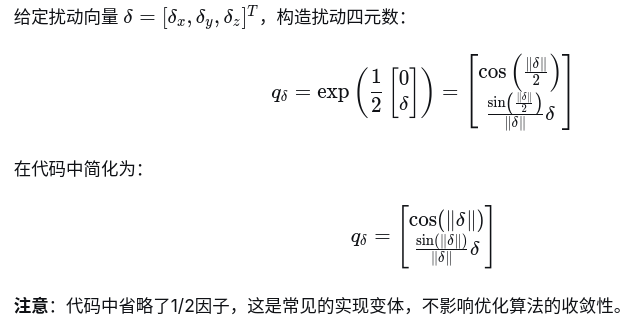
再看下理论基础
![]()
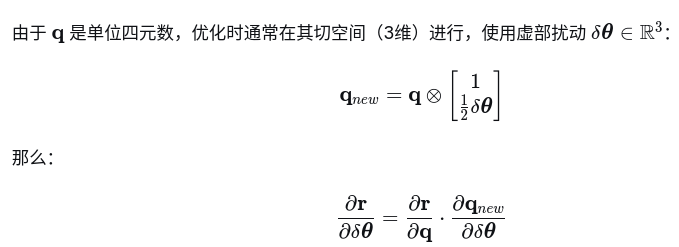
实现过程中,往往直接使用ceres-solver自带的切空间处理方法,因此这里简单介绍下
ceres::QuaternionManifold* quaternion_manifold = new ceres::QuaternionManifold(); // w, x, y, z
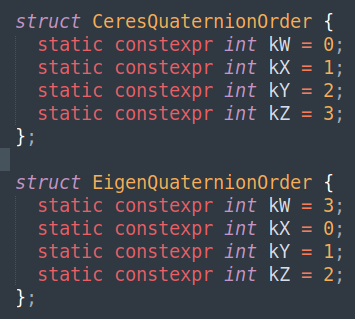
这里Eigen版或者非Eigen版差别是四元数顺序不同,其它基本一致,因此只介绍一个即可,定义如下
// Implements the manifold for a Hamilton quaternion as defined in
// https://en.wikipedia.org/wiki/Quaternion. Quaternions are represented as
// unit norm 4-vectors, i.e.
//
// q = [q0; q1; q2; q3], |q| = 1
//
// is the ambient space representation.
//
// q0 scalar part.
// q1 coefficient of i.
// q2 coefficient of j.
// q3 coefficient of k.
//
// where: i*i = j*j = k*k = -1 and i*j = k, j*k = i, k*i = j.
//
// The tangent space is R^3, which relates to the ambient space through the
// Plus and Minus operations defined as:
//
// Plus(x, delta) = [cos(|delta|); sin(|delta|) * delta / |delta|] * x
// Minus(y, x) = to_delta(y * x^{-1})
//
// where "*" is the quaternion product and because q is a unit quaternion
// (|q|=1), q^-1 = [q0; -q1; -q2; -q3]
//
// and to_delta( [q0; u_{3x1}] ) = u / |u| * atan2(|u|, q0)
class CERES_EXPORT QuaternionManifold final : public Manifold {
public:
int AmbientSize() const override { return 4; }
int TangentSize() const override { return 3; }
bool Plus(const double* x,
const double* delta,
double* x_plus_delta) const override;
bool PlusJacobian(const double* x, double* jacobian) const override;
bool Minus(const double* y,
const double* x,
double* y_minus_x) const override;
bool MinusJacobian(const double* x, double* jacobian) const override;
};实现如下
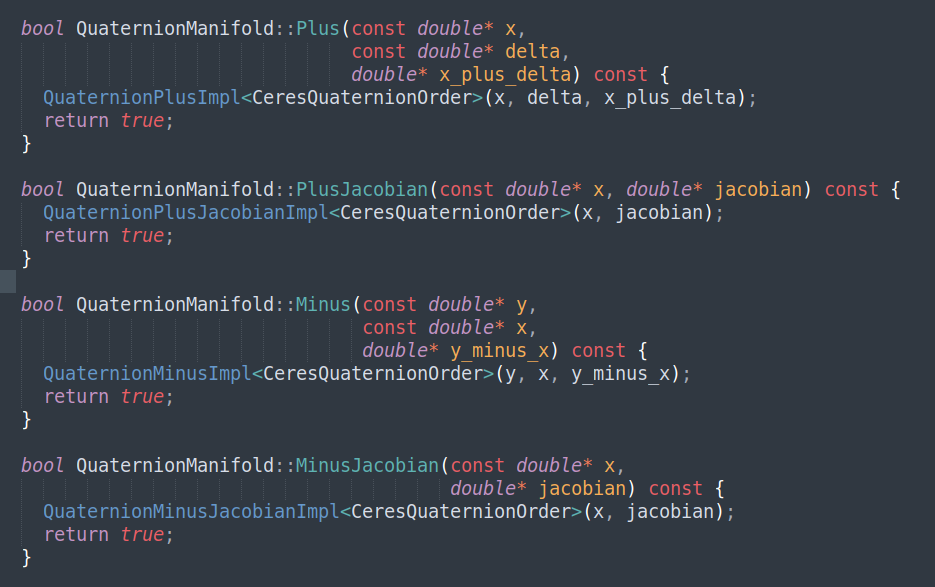
这里的加和减区别不大,因此介绍其中之一即可,可以看到实现主要在基类中,主要Eigen版跟非Eigen版的顺序
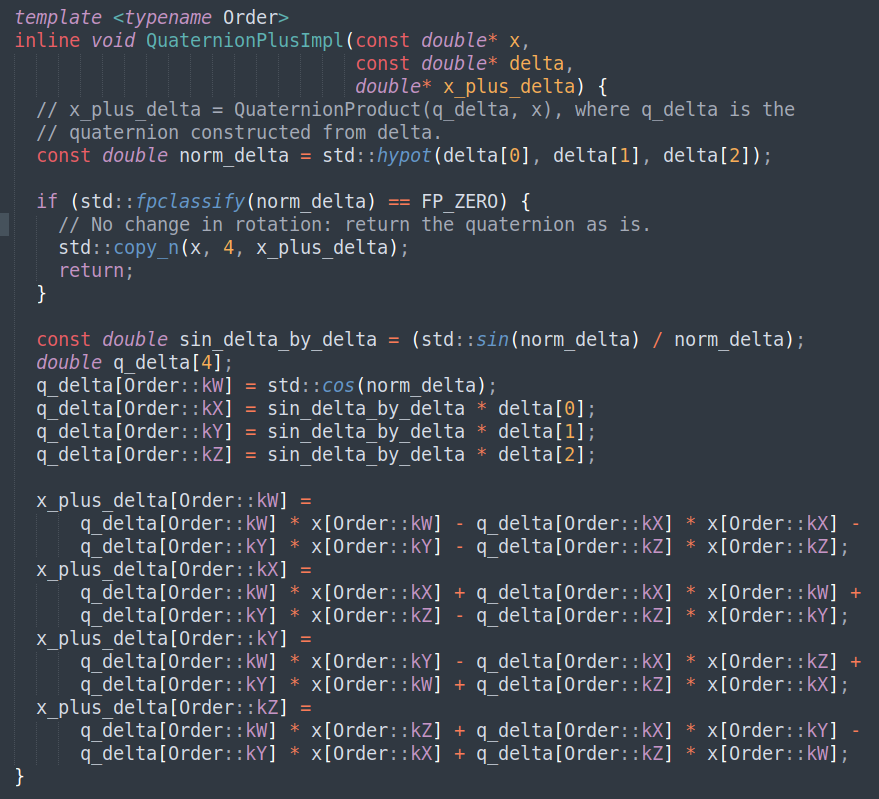
上述代码的解释如下

四元数乘法
特殊情况处理
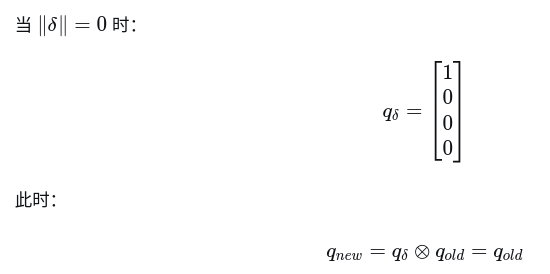
完整的表达方式
再来看雅可比相关部分
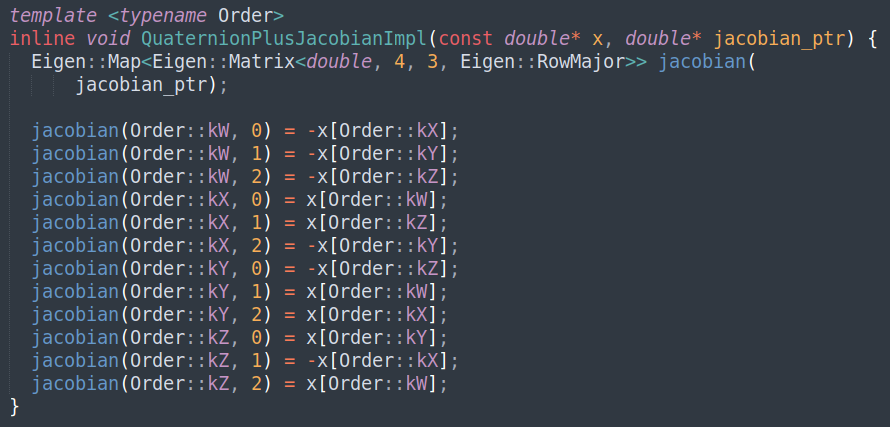
提取有效部分即为上面的雅可比矩阵

结果展示:
注意局部参数化我们直接使用ceres-solver内部的接口,因此外部雅可比只需要算到对四元数的导数,而不需要算局部参数化的雅可比
bool Solve(const std::vector<Eigen::Vector3d>& landmarks,
const std::vector<Eigen::Vector2d>& bearings,
Eigen::Vector3d& initial_translation,
Eigen::Quaterniond& initial_rotation) {
if (landmarks.size() != bearings.size() || landmarks.empty()) {
std::cerr << "Error: landmarks and bearings must have same non-zero size" << std::endl;
return false;
}
// 将初始旋转转换为四元数(确保是单位四元数)
Eigen::Quaterniond q = initial_rotation.normalized();
// 优化变量
double translation[3] = {initial_translation.x(), initial_translation.y(), initial_translation.z()};
double quaternion[4] = {q.x(), q.y(), q.z(), q.w()}; // Eigen使用 [x,y,z,w] 格式
// 创建问题
ceres::Problem problem;
problem.AddParameterBlock(translation, 3);
// 添加四元数流形约束
// ceres::EigenQuaternionManifold* quaternion_manifold = new ceres::EigenQuaternionManifold(); // w, x, y, z
ceres::QuaternionManifold* quaternion_manifold = new ceres::QuaternionManifold(); // x, y, z, w
problem.AddParameterBlock(quaternion, 4, quaternion_manifold);
std::vector<Eigen::Vector3d> opt_landmarks = landmarks;
// 为每个观测添加残差块(使用解析导数)
for (size_t i = 0; i < landmarks.size(); ++i) {
ceres::CostFunction* cost_function =
new AnalyticReprojectionError(landmarks[i], bearings[i], fx_, fy_, cx_, cy_);
problem.AddResidualBlock(cost_function,
nullptr, // 使用默认的损失函数(L2范数)
translation,
quaternion);
}
// 设置求解选项
ceres::Solver::Options options;
options.linear_solver_type = ceres::DENSE_SCHUR;
options.minimizer_progress_to_stdout = false;
options.max_num_iterations = 1000;
options.function_tolerance = 1e-8;
options.gradient_tolerance = 1e-12;
options.parameter_tolerance = 1e-10;
// 暂时禁用梯度检查以测试基本功能
// options.check_gradients = false;
// options.gradient_check_relative_precision = 1e-6;
// 使用更保守的优化策略
options.trust_region_strategy_type = ceres::DOGLEG;
// options.dogleg_type = ceres::TRADITIONAL_DOGLEG;
// 求解
ceres::Solver::Summary summary;
ceres::Solve(options, &problem, &summary);
std::cout << summary.BriefReport() << std::endl;
std::cout << "Initial cost: " << summary.initial_cost << std::endl;
std::cout << "Final cost: " << summary.final_cost << std::endl;
// 输出优化结果
if (summary.IsSolutionUsable()) {
// 更新结果
initial_translation = Eigen::Vector3d(translation[0], translation[1], translation[2]);
// 注意:Eigen四元数构造函数的参数顺序是 (w, x, y, z)
initial_rotation = Eigen::Quaterniond(quaternion[3], quaternion[0], quaternion[1], quaternion[2]);
initial_rotation.normalize();
std::cout << "Optimization successful!" << std::endl;
std::cout << "Final translation: " << initial_translation.transpose() << std::endl;
std::cout << "Final rotation quaternion: " << initial_rotation.coeffs().transpose() << std::endl;
// 计算旋转矩阵和欧拉角(可选)
Eigen::Matrix3d R_final = initial_rotation.toRotationMatrix();
std::cout << "Final rotation matrix:\n" << R_final << std::endl;
return true;
} else {
std::cerr << "Optimization failed!" << std::endl;
return false;
}
}主流程如上所示,主要就是利用四元数求的导数,来优化pnp的位姿,结果如下
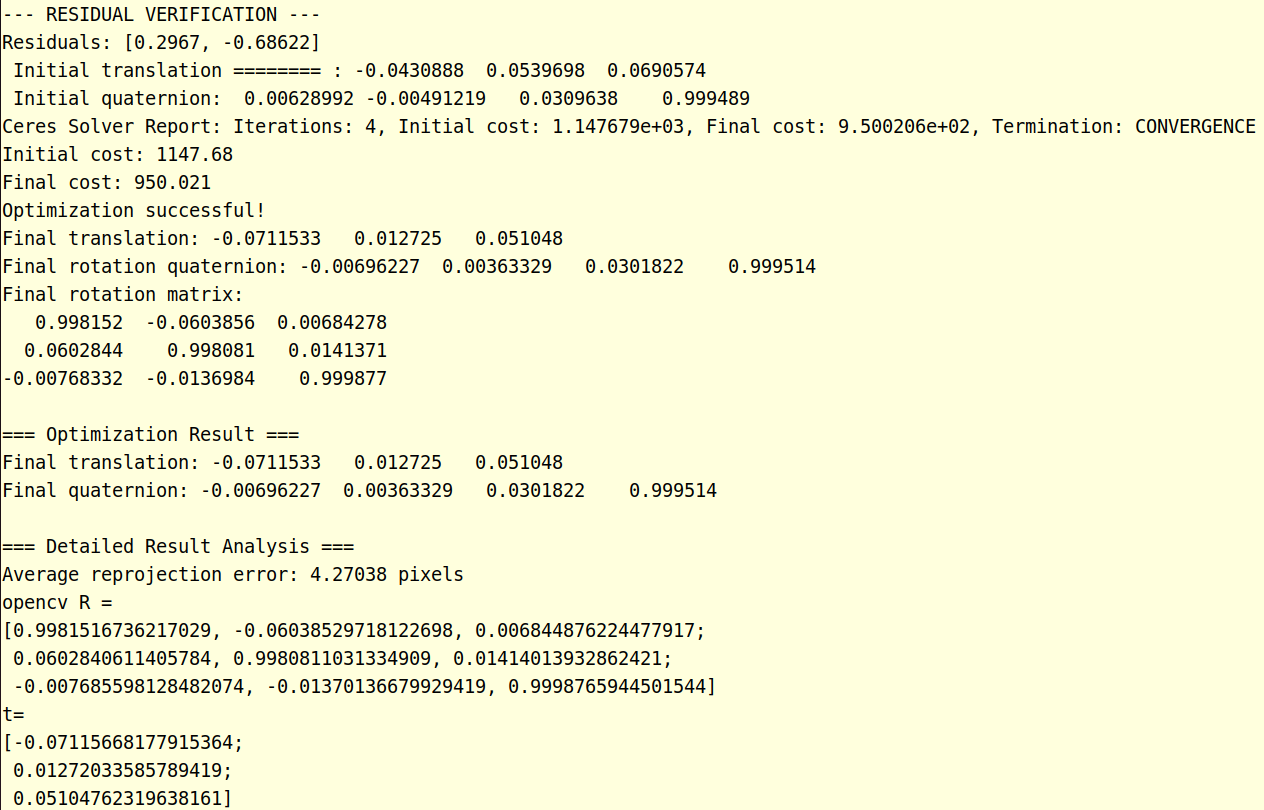
如图所示,opencv结果展示的旋转和平移,平移部分几乎和我们的算的一摸一样,我们把旋转矩阵转换为四元数来看看结果
代入旋转矩阵
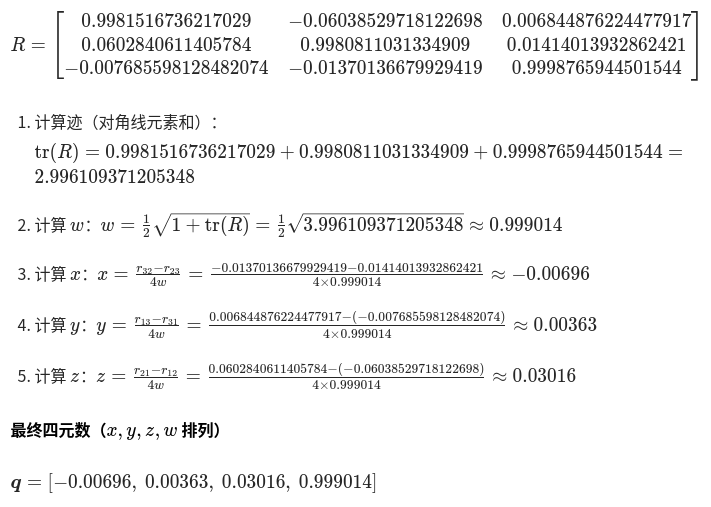
与我们的结果几乎一摸一样,足以证明算法的正确性

中国智能体开发者社区,聚焦智能体与大模型开发,提供前沿资讯、实用工具链、开源项目及行业案例。通过技术沙龙、开发者大赛等活动,促进经验交流与协作,助力开发者快速构建创新智能应用。
更多推荐
 6
6 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)