知行机器人关节(mimic)夹爪的URDF模型建立和RVIZ可视化
本文介绍了如何基于robotiq_arg85_description的URDF模型创建自定义关节夹爪模型。首先在SolidWorks中建立坐标系和基准轴并导出URDF模型,可通过VSCode的ROS扩展查看坐标系。其次参考原模型调整自定义URDF,添加mimic关节并设置参数(如joint3的multiplier=-1、offset=0)。最后在RViz中实现模型可视化,验证模型正确性。
·
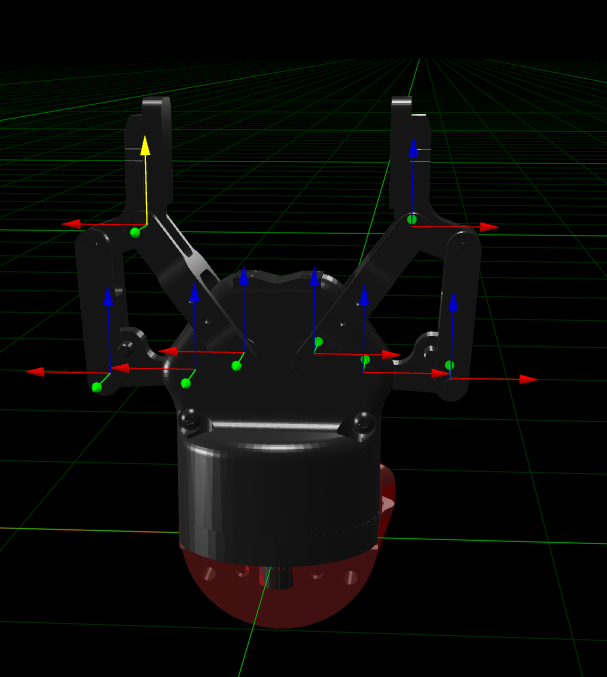
1. 参考robotiq_arg85_description中urdf模型,结合solidworks给自己的关节夹爪建立坐标系和基准轴,导出urdf模型。可以用vscode中ros扩展查看坐标系,如下图。
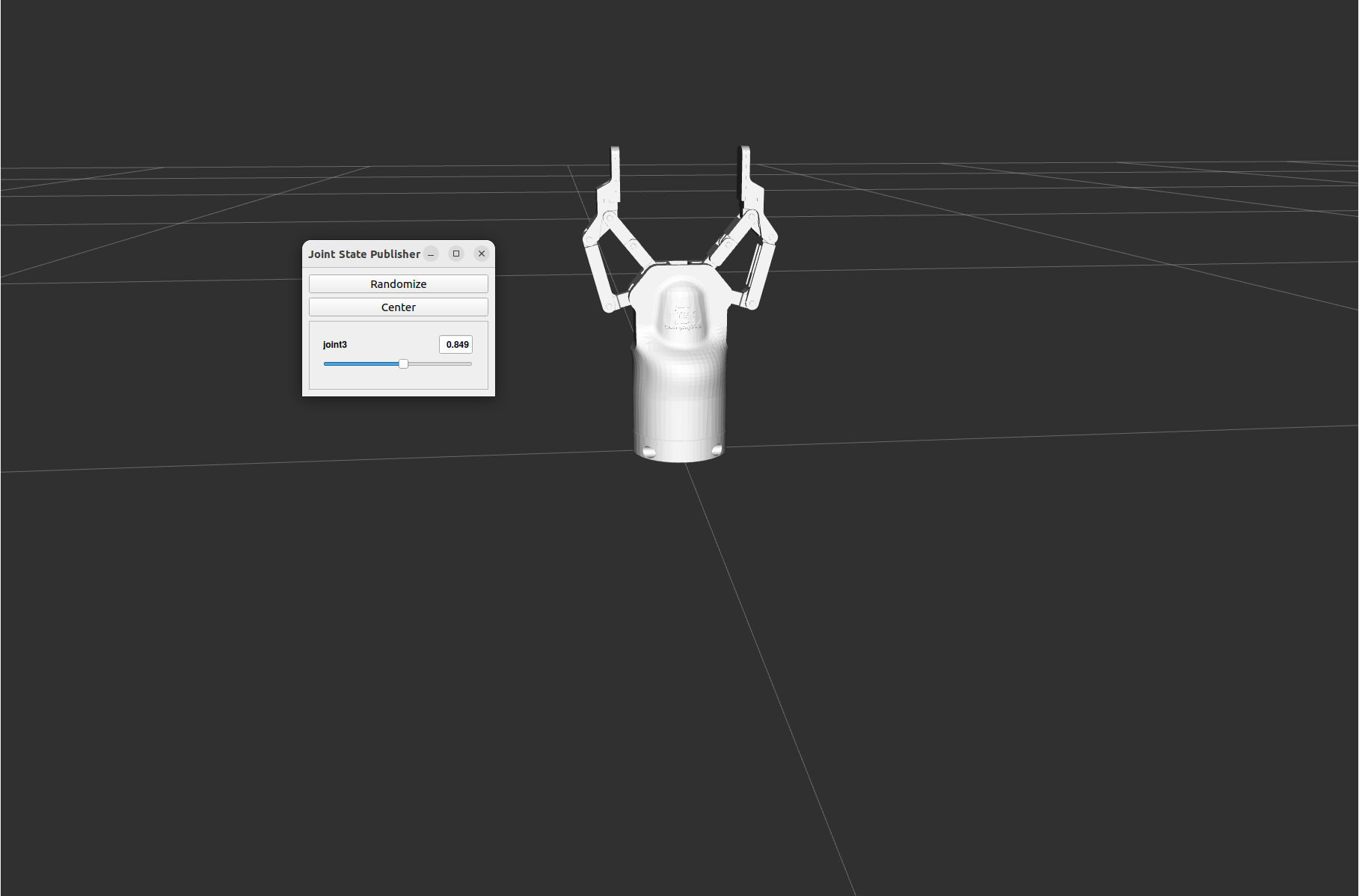
2. 同样参考robotiq_arg85_description中urdf模型,微调自己的urdf模型,添加mimic关节。
<mimic
joint="joint3"
multiplier="-1"
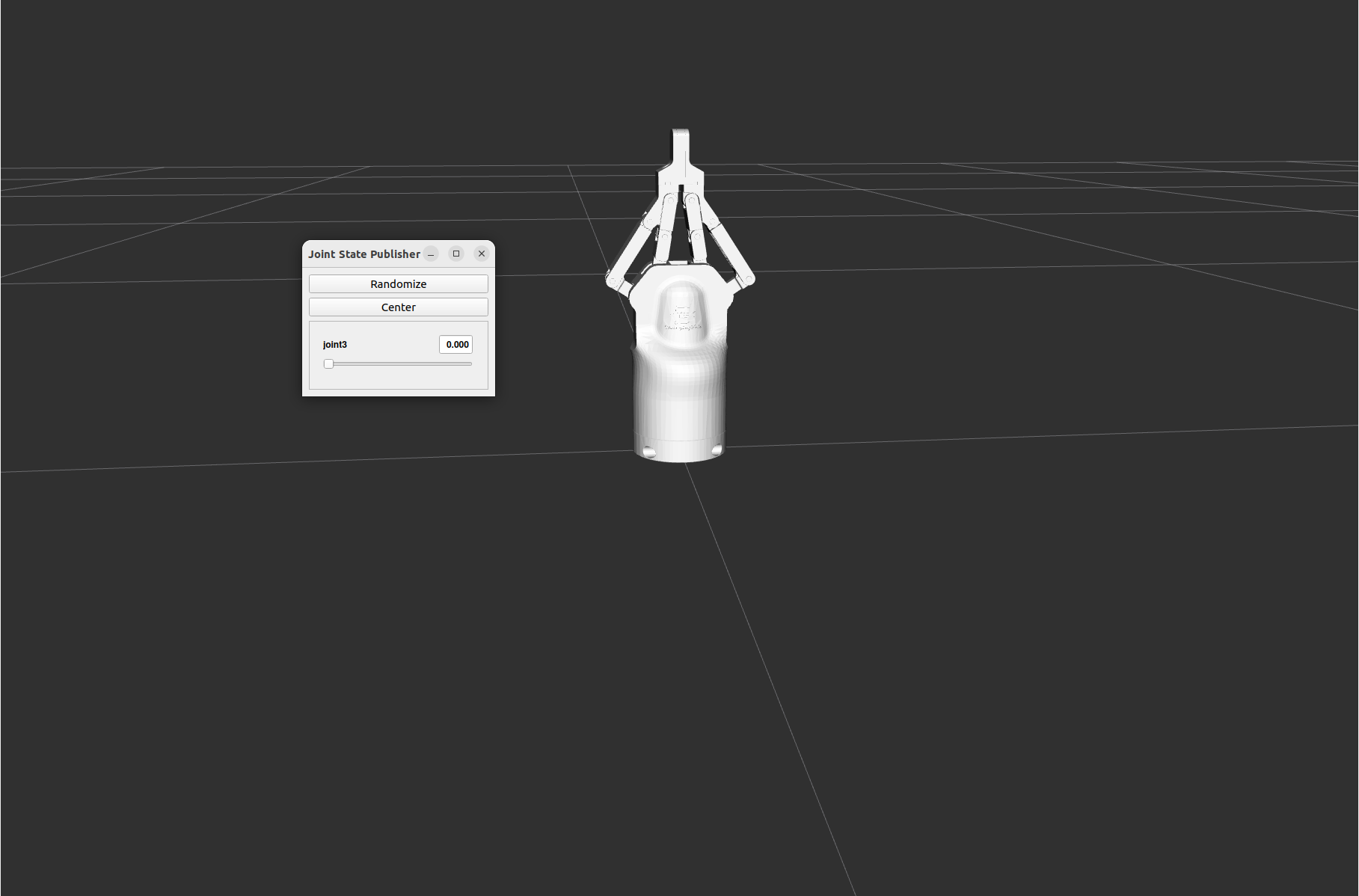
offset="0" />3. 在rviz中可视化

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 3
3 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)