STM32 FreeRTOS 创建任务(STM32CubeMX / IDE CMSIS-RTOS V2)
19:18:17.391]收←◆myTestTask0_Func running...[19:18:18.385]收←◆myTestTask1_Func running...[19:18:20.375]收←◆myTestTask1_Func running...:选择使用动态内存分配的还是静态内存的方式创建线程。:当使用静态内存创建线程,创建的线程控制块变量名。设置一样会出现调度问题,优先级不要设
·
STM32 FreeRTOS 创建任务(STM32CubeMX / IDE CMSIS-RTOS V2)
一、CubeIDE\CubeMX中创建
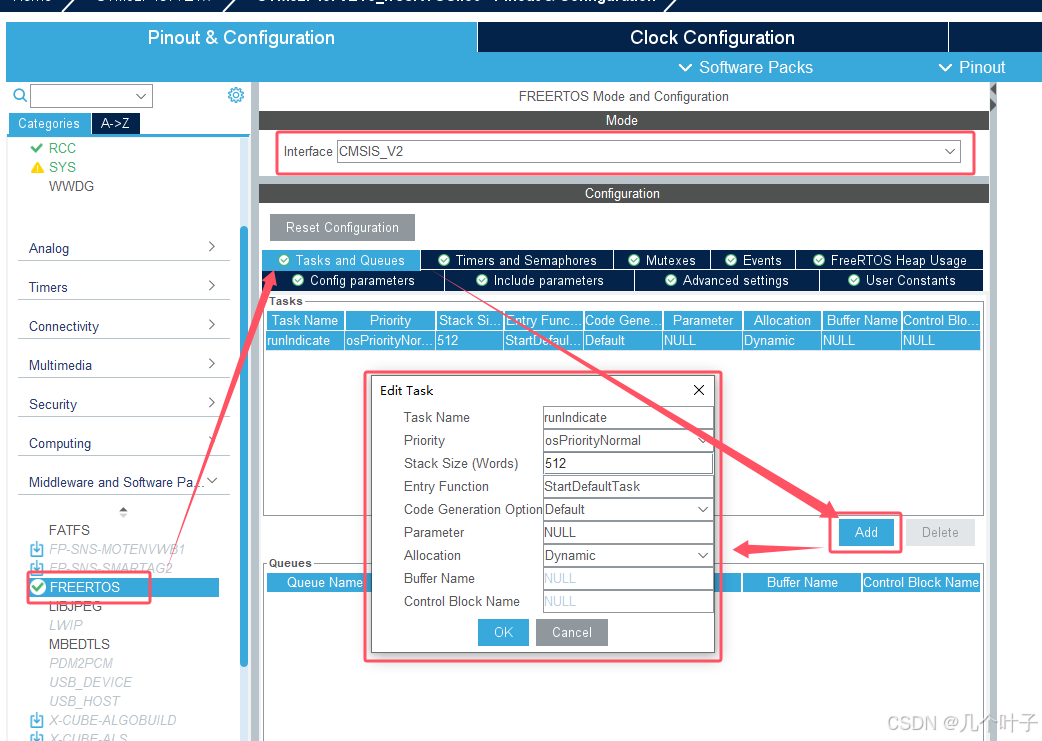
任务选项
-
Task Name :用于设置线程名。
-
Priority :用于设置线程优先级。
-
Stack Size(Words) :用于设置线程栈大小(堆栈使用溢出会卡死)。
-
Entry Function :用于设置线程函数名。
-
Code Generation Option :代码的生成方式选项,可选择以 形式生成。
-
Parameter :线程函数参数
-
Allocation :选择使用动态内存分配的还是静态内存的方式创建线程。
-
Buffer Name :当使用静态内存创建线程,使用的栈地址名。
-
Control Block Name :当使用静态内存创建线程,创建的线程控制块变量名。
生成代码后:
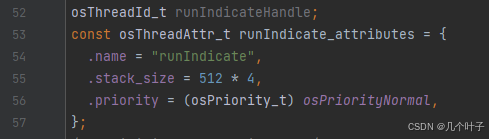
1、 在 freertos.c 中 声明了任务控制块(TCB)指针变量:
// 定义一个操作系统线程ID变量,用于运行指示处理线程
osThreadId_t runIndicateHandle;
// 定义运行指示处理线程的属性
const osThreadAttr_t runIndicate_attributes = {
.name = "runIndicate", // 线程名称
.stack_size = 512 * 4, // 线程堆栈大小,单位是字节
.priority = (osPriority_t) osPriorityNormal, // 线程优先级,设置为正常优先级
};
2、 在 freertos.c 中 声明了任务的执行函数:
这里函数没有参数值,因为设置的 Parameter :线程函数参数为NULL。
void StartDefaultTask(void *argument);
3、 在 main.c 中 任务创建
在 main.c调用 freertos.c 的 MX_FREERTOS_Init() 函数初始化任务 :
// 创建并启动一个默认任务线程
// 该线程用于执行初始化和默认操作
// 参数说明:
// - StartDefaultTask: 线程执行的函数入口
// - NULL: 线程函数的参数,这里不需要传递参数
// - &runIndicate_attributes: 指向线程属性结构体的指针,用于配置线程属性
runIndicateHandle = osThreadNew(StartDefaultTask, NULL, &runIndicate_attributes);
对应函数API文档: 线程管理API
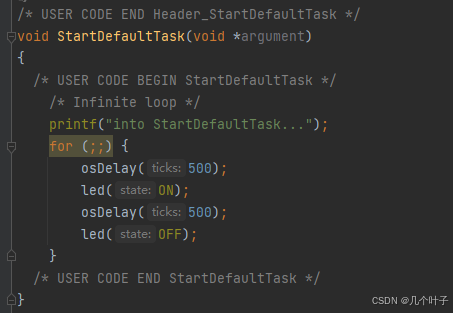
4、实现对应的任务函数内容:
void StartDefaultTask(void *argument)
{
/* USER CODE BEGIN StartDefaultTask */
/* Infinite loop */
printf("into StartDefaultTask...");
for (;;) {
osDelay(500);
led(ON);
osDelay(500);
led(OFF);
}
/* USER CODE END StartDefaultTask */
}
函数代码已经是生成的,只需要在里面实现功能即可。
二、自己使用 CMSIS-RTOS API创建
1、创建自己的任务管理文件
创建taskManager.c\.h 管自己代码创建的任务。添加头文件。
#include "cmsis_os2.h"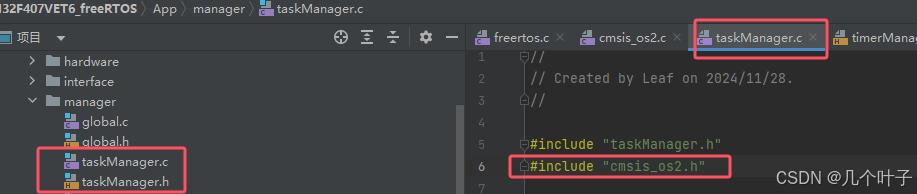
2、声明任务控制块(TCB)指针变量 任务句柄: 注意创建多个任务时 .priority 设置一样会出现调度问题,优先级不要设置一样。
osThreadId_t myTestTaskHandle_0; // 定义一个操作系统线程ID变量
const osThreadAttr_t myTestTask0_attributes = { // 定义运行指示处理线程的属性
.name = "myTestTask0", // 线程名称
.stack_size = 512 * 4, // 线程堆栈大小,单位是字节
.priority = (osPriority_t) osPriorityNormal, // 线程优先级,设置为正常优先级
};
3、 声明、创建任务的执行函数:
void myTestTask0_Func(void *argument) {
while (1) {
osDelay(1000);
printf("myTestTask0_Func running...\n");
}
}
4、创建初始函数,并在 MX_FREERTOS_Init()调用该初始化:
//任务初始化函数
void taskInit(void);/**
* 任务初始化函数taskInit
*/
void taskInit(void) {
myTestTaskHandle_0 = osThreadNew(myTestTask0_Func, NULL, &myTestTask0_attributes);
}
可以使用的任务优先级:
typedef enum {
osPriorityNone = 0, ///< No priority (not initialized).
osPriorityIdle = 1, ///< Reserved for Idle thread.
osPriorityLow = 8, ///< Priority: low
osPriorityLow1 = 8+1, ///< Priority: low + 1
osPriorityLow2 = 8+2, ///< Priority: low + 2
osPriorityLow3 = 8+3, ///< Priority: low + 3
osPriorityLow4 = 8+4, ///< Priority: low + 4
osPriorityLow5 = 8+5, ///< Priority: low + 5
osPriorityLow6 = 8+6, ///< Priority: low + 6
osPriorityLow7 = 8+7, ///< Priority: low + 7
osPriorityBelowNormal = 16, ///< Priority: below normal
osPriorityBelowNormal1 = 16+1, ///< Priority: below normal + 1
osPriorityBelowNormal2 = 16+2, ///< Priority: below normal + 2
osPriorityBelowNormal3 = 16+3, ///< Priority: below normal + 3
osPriorityBelowNormal4 = 16+4, ///< Priority: below normal + 4
osPriorityBelowNormal5 = 16+5, ///< Priority: below normal + 5
osPriorityBelowNormal6 = 16+6, ///< Priority: below normal + 6
osPriorityBelowNormal7 = 16+7, ///< Priority: below normal + 7
osPriorityNormal = 24, ///< Priority: normal
osPriorityNormal1 = 24+1, ///< Priority: normal + 1
osPriorityNormal2 = 24+2, ///< Priority: normal + 2
osPriorityNormal3 = 24+3, ///< Priority: normal + 3
osPriorityNormal4 = 24+4, ///< Priority: normal + 4
osPriorityNormal5 = 24+5, ///< Priority: normal + 5
osPriorityNormal6 = 24+6, ///< Priority: normal + 6
osPriorityNormal7 = 24+7, ///< Priority: normal + 7
osPriorityAboveNormal = 32, ///< Priority: above normal
osPriorityAboveNormal1 = 32+1, ///< Priority: above normal + 1
osPriorityAboveNormal2 = 32+2, ///< Priority: above normal + 2
osPriorityAboveNormal3 = 32+3, ///< Priority: above normal + 3
osPriorityAboveNormal4 = 32+4, ///< Priority: above normal + 4
osPriorityAboveNormal5 = 32+5, ///< Priority: above normal + 5
osPriorityAboveNormal6 = 32+6, ///< Priority: above normal + 6
osPriorityAboveNormal7 = 32+7, ///< Priority: above normal + 7
osPriorityHigh = 40, ///< Priority: high
osPriorityHigh1 = 40+1, ///< Priority: high + 1
osPriorityHigh2 = 40+2, ///< Priority: high + 2
osPriorityHigh3 = 40+3, ///< Priority: high + 3
osPriorityHigh4 = 40+4, ///< Priority: high + 4
osPriorityHigh5 = 40+5, ///< Priority: high + 5
osPriorityHigh6 = 40+6, ///< Priority: high + 6
osPriorityHigh7 = 40+7, ///< Priority: high + 7
osPriorityRealtime = 48, ///< Priority: realtime
osPriorityRealtime1 = 48+1, ///< Priority: realtime + 1
osPriorityRealtime2 = 48+2, ///< Priority: realtime + 2
osPriorityRealtime3 = 48+3, ///< Priority: realtime + 3
osPriorityRealtime4 = 48+4, ///< Priority: realtime + 4
osPriorityRealtime5 = 48+5, ///< Priority: realtime + 5
osPriorityRealtime6 = 48+6, ///< Priority: realtime + 6
osPriorityRealtime7 = 48+7, ///< Priority: realtime + 7
osPriorityISR = 56, ///< Reserved for ISR deferred thread.
osPriorityError = -1, ///< System cannot determine priority or illegal priority.
osPriorityReserved = 0x7FFFFFFF ///< Prevents enum down-size compiler optimization.
} osPriority_t;
在 MX_FREERTOS_Init()中:
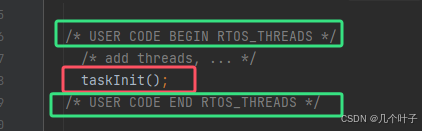
完成:
完整代码:
taskManager.c
//
// Created by Leaf on 2024/11/28.
//
#include "taskManager.h"
#include "cmsis_os2.h"
osThreadId_t myTestTaskHandle_0; // 定义一个操作系统线程ID变量
const osThreadAttr_t myTestTask0_attributes = { // 定义运行指示处理线程的属性
.name = "myTestTask0", // 线程名称
.stack_size = 512 * 4, // 线程堆栈大小,单位是字节
.priority = (osPriority_t) osPriorityNormal, // 线程优先级,设置为正常优先级
};
void myTestTask0_Func(void *argument) {
while (1) {
osDelay(1000);
printf("myTestTask0_Func running...\n");
}
}
/**
* 任务初始化函数taskInit
*/
void taskInit(void) {
myTestTaskHandle_0 = osThreadNew(myTestTask0_Func, NULL, &myTestTask0_attributes);
}
void vApplicationStackOverflowHook(xTaskHandle xTask, signed char *pcTaskName) {
// 打印任务名称,及其任务句柄
printf("任务溢出: %s (Task Handle: %p)\n", pcTaskName, xTask);
}taskManager.h
//
// Created by Leaf on 2024/11/28.
//
#ifndef STM32F407VET6_FREERTOS_TIMERMANAGER_H
#define STM32F407VET6_FREERTOS_TIMERMANAGER_H
#include "global.h"
// 软件定时器初始化创建
void timerInit(void);
#endif //STM32F407VET6_FREERTOS_TIMERMANAGER_H
注意创建多个任务时 .priority 设置一样会出现调度问题,优先级不要设置一样。
例如:
osThreadId_t myTestTaskHandle_0; // 定义一个操作系统线程ID变量
const osThreadAttr_t myTestTask0_attributes = { // 定义运行指示处理线程的属性
.name = "myTestTask0", // 线程名称
.stack_size = 512 * 4, // 线程堆栈大小,单位是字节
.priority = (osPriority_t) osPriorityNormal, // 线程优先级,设置为正常优先级
};
osThreadId_t myTestTaskHandle_1; // 定义一个操作系统线程ID变量
const osThreadAttr_t myTestTask1_attributes = { // 定义运行指示处理线程的属性
.name = "myTestTask1", // 线程名称
.stack_size = 512 * 4, // 线程堆栈大小,单位是字节
.priority = (osPriority_t) osPriorityNormal, // 线程优先级,设置为正常优先级
};
void myTestTask0_Func(void *argument) {
while (1) {
osDelay(1000);
printf("myTestTask0_Func running...\n");
}
}
void myTestTask1_Func(void *argument) {
while (1) {
osDelay(1000);
printf("myTestTask1_Func running...\n");
}
}
/**
* 任务初始化函数taskInit
*/
void taskInit(void) {
myTestTaskHandle_0 = osThreadNew(myTestTask0_Func, NULL, &myTestTask0_attributes);
myTestTaskHandle_1 = osThreadNew(myTestTask1_Func, NULL, &myTestTask1_attributes);
}
输出:
[19:18:17.391]收←◆myTestTask0_Func running...[19:18:18.385]收←◆myTestTask1_Func running...[19:18:19.380]收←◆myTestTask0_Func running...[19:18:20.375]收←◆myTestTask1_Func running...[19:18:21.369]收←◆myTestTask0_Func running...[19:18:22.363]收←◆myTestTask1_Func running..
不再是每个线程间隔一秒输出。设置不同优先级解决。

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 30
30 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)