控制系统仿真:从理论到MATLAB / Simulink实践
MATLAB / Simulink仿真,控制系统仿真,系统建模,无人机数值仿真,PID控制,滑模控制,自抗扰控制,过程控制,运动控制,比值控制等各种控制系统模型在控制系统的世界里,模型构建与仿真是深入理解和优化系统性能的关键手段。无论是无人机飞行的精准控制,还是工业生产线上的过程把控,各类控制系统模型都发挥着举足轻重的作用。今天,咱们就来唠唠MATLAB / Simulink在控制系统仿真中的精彩
MATLAB / Simulink仿真,控制系统仿真,系统建模,无人机数值仿真,PID控制,滑模控制,自抗扰控制,过程控制,运动控制,比值控制等各种控制系统模型
在控制系统的世界里,模型构建与仿真是深入理解和优化系统性能的关键手段。无论是无人机飞行的精准控制,还是工业生产线上的过程把控,各类控制系统模型都发挥着举足轻重的作用。今天,咱们就来唠唠MATLAB / Simulink在控制系统仿真中的精彩应用,顺便耍耍几种常见的控制算法。
系统建模:搭建控制系统的基石
系统建模是将实际物理系统抽象为数学模型的过程。比如在无人机数值仿真里,我们得描述无人机的动力学特性,建立其在三维空间中的运动方程。以一个简化的二维平面无人机模型为例,假设其水平方向速度为$vx$,垂直方向速度为$vy$,受到的水平外力为$Fx$,垂直外力为$Fy$,质量为$m$,那么根据牛顿第二定律,我们可以得到:
\[
\begin{cases}
m\frac{dvx}{dt} = Fx \\
m\frac{dvy}{dt} = Fy
\end{cases}
\]
在MATLAB中,我们可以通过编写函数来实现这一模型:
function [dxdt] = drone_model(t, x, Fx, Fy, m)
% x(1) 代表水平速度 vx
% x(2) 代表垂直速度 vy
dxdt = zeros(2, 1);
dxdt(1) = Fx / m;
dxdt(2) = Fy / m;
end这段代码定义了一个函数drone_model,它接受当前时间t,状态变量x(包含水平和垂直速度),外力Fx、Fy以及质量m作为输入,输出状态变量的导数dxdt,这样就初步搭建起了无人机动力学模型的计算逻辑。
控制算法的舞台:PID、滑模与自抗扰
PID控制:经典永流传
PID控制作为最经典的控制算法,广泛应用于各类控制系统。它通过比例(P)、积分(I)、微分(D)三个环节的线性组合来调整控制量。其控制律表达式为:
\[ u(t) = Kp e(t) + Ki \int{0}^{t} e(\tau) d\tau + Kd \frac{de(t)}{dt} \]
其中,$e(t)$是误差,即设定值与实际值的差值,$Kp$、$Ki$、$K_d$分别是比例、积分、微分系数。
在Simulink中搭建PID控制的无人机高度控制系统非常直观。我们只需要在模型库中拖入PID控制器模块,设置好$Kp$、$Ki$、$K_d$参数,将高度设定值与实际高度反馈的差值输入到PID控制器,其输出作为控制无人机上升或下降的力。
滑模控制:剑走偏锋的稳健
滑模控制是一种非线性控制策略,它通过设计一个滑动面,使系统状态在滑动面上滑动并最终收敛到平衡点。以无人机姿态控制为例,假设我们要控制无人机的俯仰角$\theta$,定义误差$e = \thetad - \theta$($\thetad$为期望俯仰角),设计滑动面$s = \dot{e} + \lambda e$($\lambda > 0$)。控制律通常设计为:
\[ u = -\frac{1}{b}(k \text{sgn}(s) + \hat{f}) \]
其中,$b$是与系统相关的参数,$k$是控制增益,$\text{sgn}(s)$是符号函数,$\hat{f}$是对系统不确定项的估计。
在MATLAB代码实现上,大致思路如下:
% 滑模控制参数
lambda = 5;
k = 10;
b = 1;
% 初始状态
theta = 0;
theta_dot = 0;
theta_d = pi/4; % 期望俯仰角
% 仿真时间
tspan = 0:0.01:10;
options = odeset('RelTol',1e-4,'AbsTol',1e-4);
[t, y] = ode45(@(t, y) sliding_mode_control(t, y, theta_d, lambda, k, b), tspan, [theta; theta_dot], options);
function dydt = sliding_mode_control(t, y, theta_d, lambda, k, b)
theta = y(1);
theta_dot = y(2);
e = theta_d - theta;
s = theta_dot + lambda * e;
u = -1/b * (k * sign(s));
dydt = [theta_dot; u];
end这段代码定义了滑模控制函数slidingmodecontrol,并通过ode45求解系统状态随时间的变化。它不断根据当前状态计算误差和滑动面,进而调整控制量u,以驱使无人机俯仰角向期望角度靠近。
自抗扰控制:应对不确定性的能手
自抗扰控制(ADRC)是一种新兴的控制策略,它能实时估计并补偿系统的内、外扰动。其核心思想是将系统总扰动(包括模型不确定性和外部干扰)扩张为一个新的状态变量,然后通过状态观测器进行估计并补偿。
在实际应用中,比如无人机在有风场干扰下的飞行控制,ADRC可以有效地应对风的不确定性。虽然ADRC的实现相对复杂些,但MATLAB的相关工具箱和开源代码为我们提供了便利。
比值控制与过程控制:工业领域的得力助手
比值控制常用于过程控制中,比如在化工生产中,需要精确控制两种物料的进料比例。假设物料A和物料B的流量分别为$qA$和$qB$,期望的比例为$K$,即$qB = KqA$。我们可以通过调节控制阀门来改变流量。
在Simulink中,可以搭建一个简单的比值控制系统模型,用一个乘法器实现$KqA$的计算,然后将其与$qB$的实际测量值进行比较,差值输入到PID控制器,PID控制器的输出再去调节物料B的进料阀门开度。
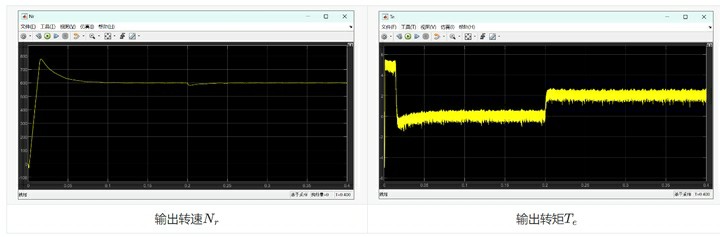
运动控制:赋予系统灵动之美
运动控制关注的是如何精确地控制物体的运动轨迹。在机器人手臂运动控制或者数控机床加工中,运动控制算法要确保机械部件按照预定路径精准移动。以一个简单的单轴电机运动控制为例,我们可以用PID算法来控制电机的转速,使其跟随设定的速度曲线。
在MATLAB中,可以通过调用相关的电机模型库,结合PID控制代码实现电机速度的闭环控制:
% 电机参数
J = 0.01; % 转动惯量
Kt = 0.1; % 转矩系数
Ke = 0.1; % 反电动势系数
R = 1; % 电阻
% PID参数
Kp = 10;
Ki = 1;
Kd = 0.1;
% 设定速度
omega_d = 100; % rad/s
tspan = 0:0.01:5;
omega = zeros(size(tspan));
e_int = 0;
e_prev = 0;
for i = 2:length(tspan)
dt = tspan(i) - tspan(i - 1);
% 测量速度
omega_meas = omega(i - 1);
e = omega_d - omega_meas;
e_int = e_int + e * dt;
de = (e - e_prev) / dt;
u = Kp * e + Ki * e_int + Kd * de;
% 电机动力学
omega_dot = (Kt * u - Ke * omega_meas) / J;
omega(i) = omega(i - 1) + omega_dot * dt;
e_prev = e;
end这段代码模拟了一个基于PID控制的电机速度控制过程,根据速度误差不断调整控制电压u,以使得电机转速逼近设定值。
MATLAB / Simulink就像一个神奇的实验室,让我们能够在虚拟环境中搭建、测试和优化各种控制系统模型。无论是经典的PID,还是充满挑战的滑模与自抗扰,亦或是工业场景中的比值与过程控制,都能在这里找到施展拳脚的舞台。通过不断实践和探索,我们能让控制系统更加智能、精准和可靠。欢迎各位在评论区分享你们在控制系统仿真中的有趣经历和心得!

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 9
9 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)