【稚晖君Dummy-Robot】电机驱动学习记录
Dummy-Robot 电机驱动模块主要是用于二相步进电机,电机驱动模块可以进行高效的FOC控制,也可以进行简单的换向控制,“简单的换向控制”和FOC控制最显著的区别 应该就是对电机相电流的控制,“简单的换向控制”的电机相电流大小一般是保持不变的,FOC控制的电机相电流的大小根据负载需求实时变化,FOC控制后面再单独分析吧。FOC 控制算法是整个电机驱动的核心技术,FOC控制原理:让旋转磁场(定子
1、电机驱动框架分析
Dummy-Robot 电机驱动模块主要是用于二相步进电机,电机驱动模块可以进行高效的FOC控制,也可以进行简单的换向控制,“简单的换相控制”和FOC控制最显著的区别 应该就是对电机相电流的控制,“简单的换相控制”的电机相电流大小一般保持不变,如三相无刷电机的“六步换相法”通常只控制通电顺序,使磁场跳跃式旋转,从而牵引转子转动。它不关心电流的大小,因此效率较低、转矩波动和噪音较大。而FOC通过精确控制电流矢量的大小和方向,可以实现平滑、高效、低噪音的控制。
其中电机驱动模块的软件可以分为Bsp驱动和APP应用两部分:
- Bsp 驱动部分主要是对各个外设模块进行初始化配置;
- APP 应用部分主要进行模块之间的通信数据交互,电机校准、编码数据采集处理及 FOC 控制算法实现等;
电机驱动模块的硬件部分包含STM32F103最小系统模块、稳压电源模块、斩波恒流模块、绝对值编码传感器模块等,具体如下图所示:
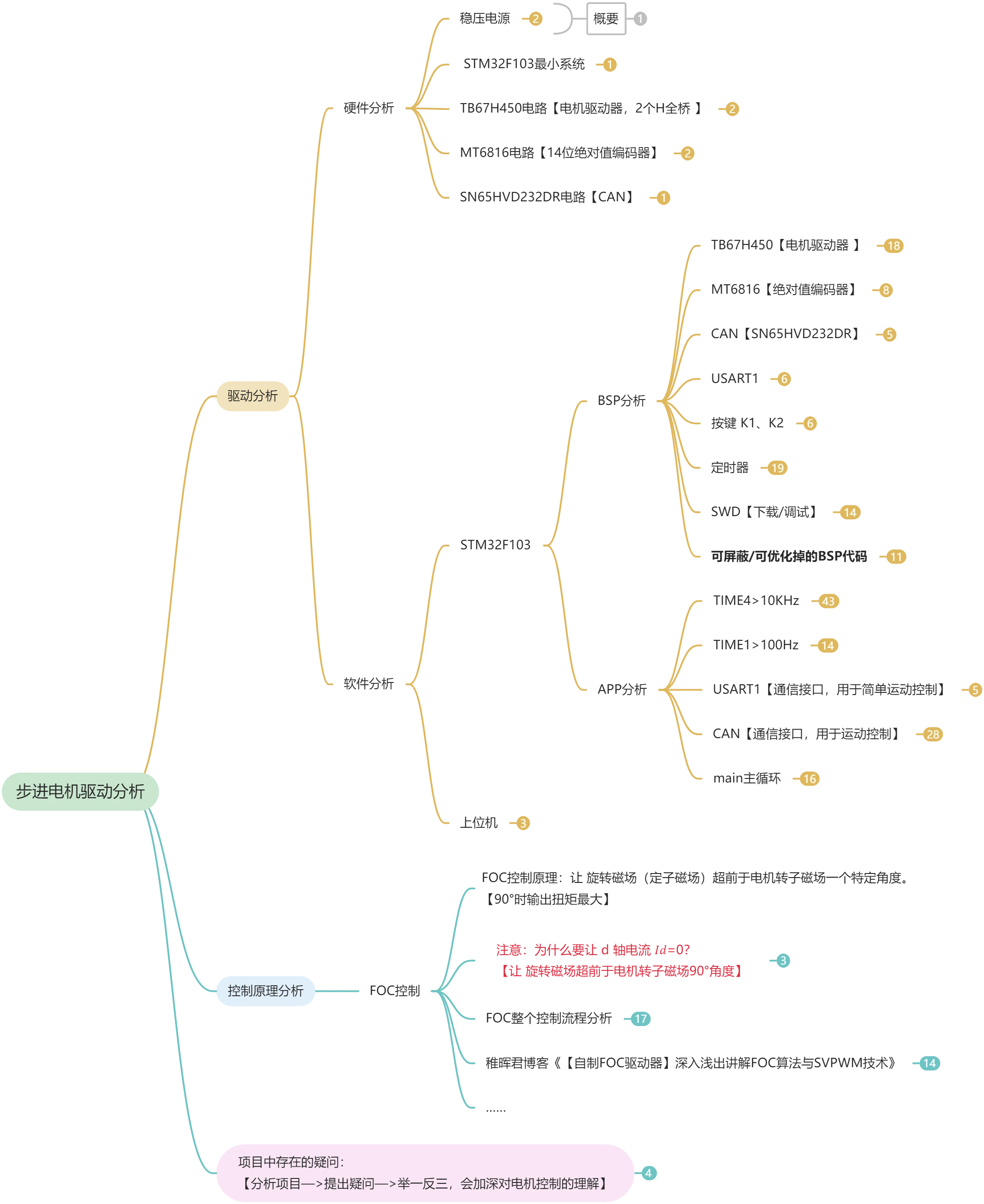
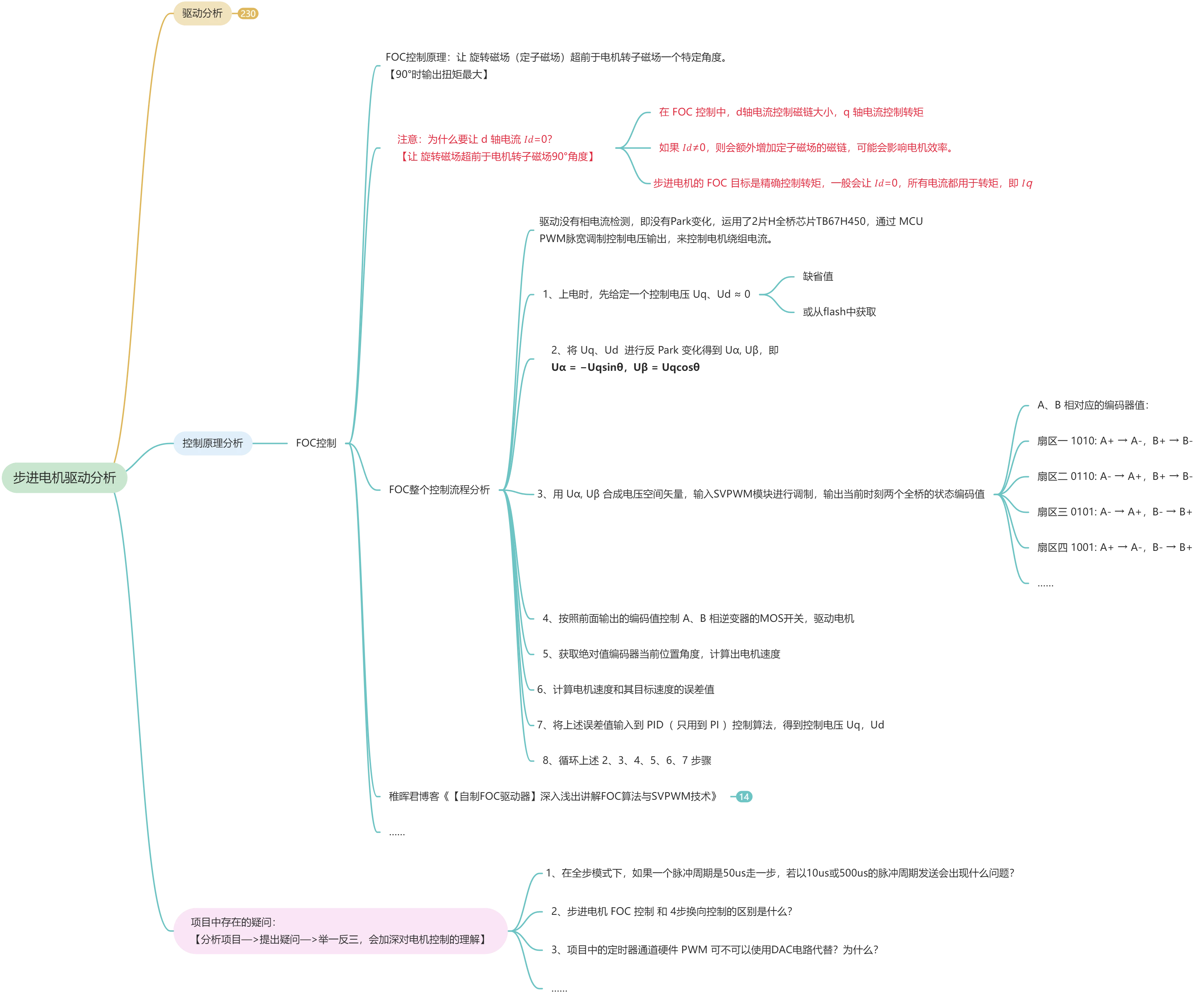
2、电机驱动 FOC 控制算法分析
FOC 控制算法是整个电机驱动的核心技术,FOC控制原理:让旋转磁场(定子磁场)超前于电机转子磁场一个特定的角度。电机转子磁场的控制可以等效 A、B 相绕组电流控制。其中使用了2片H全桥芯片TB67H450,通过 PWM 脉宽调制控制电压输出,从而可以控制电机绕组电流。具体如下图所示:
上述是个人简单学习记录,有不对的地方望各位大佬提点
图片中用到的笔记软件是“语雀”,评论区分享有笔记源文件及导出的全局脑图图片,有对dummy-robot感兴趣的小伙伴可以一起交流学习,ref主控也整理了一部分,等后面整理完善之后再分享。

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 7
7 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)