机器人相关基础知识
工业机器人(Industrial Robot)=机械臂 + 控制器 + 示教器 + 现场总线 + 工艺软件下面按“1 张总览图 + 6 大模块 + 3 条上手路线”给你速通工业机器人的必备基础知识。工业机器人 =“机械臂 + 实时控制器 + 工艺软件”的三位一体;先把“6 轴正逆解 + EtherCAT 通讯 + 示教器编程”这三关打通,就能在 90% 的产线场景里“独立上岗”。
机器人简介
(10 封私信 / 80 条消息) 机器人基础知识学习笔记---理论篇 - 知乎
下面给出一份机器人方向“从入门到进阶”的极简知识地图,按「数学 → 硬件 → 软件 → 算法 → 应用」五层展开,配合常用开源资源。你可以把它当作“字典”随时查阅。
🔹 1. 数学层(所有算法的地基)
| 概念 | 一句话解释 | 常用库 |
|---|---|---|
| 线性代数 | 4×4 齐次矩阵 = 旋转+平移一次搞定 | Eigen, numpy.linalg |
| 李群/李代数 | 把“旋转+平移”变成可求导的向量 | Sophus, ceres::Lie |
| 概率 & 估计 | 卡尔曼/粒子滤波 = 带噪声的最优估计 | filterpy, robot_localization |
| 最优化 | 非线性最小二乘 = 把误差平方和压到最小 | ceres-solver, g2o |
🔹 2. 硬件层(机器人身体)
| 模块 | 关键指标 | 典型器件 |
|---|---|---|
| 处理器 | 实时性 + 算力 | x86(ROS 主站)、STM32/ESP32(底层 MCU) |
| 执行器 | 力矩、精度、速度 | 伺服电机(Dynamixel)、无刷直驱、舵机 |
| 传感器 | 频率、噪声、视场 | LiDAR(A2/RPlidar)、IMU(MPU9250)、RGB-D(RealSense) |
| 通信 | 延迟、带宽 | CAN-FD、EtherCAT、Wi-Fi、ROS 2 DDS |
🔹 3. 软件层(让硬件动起来)
| 层级 | 作用 | 代表工具/框架 |
|---|---|---|
| 底层驱动 | 电机电流环、IMU采样 | HAL库、PlatformIO |
| 中间件 | 进程通信 + 时钟同步 | ROS 2(rclcpp)、DDS |
| 实时系统 | 微秒级控制 | FreeRTOS、Xenomai、PREEMPT_RT |
| 上层应用 | SLAM、路径规划、人机交互 | ROS Navigation2、MoveIt2、Qt/PyQt |
🔹 4. 算法层(让机器人“有脑子”)
| 任务 | 算法族 | 关键词 |
|---|---|---|
| 状态估计 | 卡尔曼、扩展卡尔曼、UKF、粒子滤波 | robot_localization |
| 建图(SLAM) | 激光 SLAM:Gmapping、Cartographer | 回环检测、图优化 |
| 路径规划 | 全局:A*、Dijkstra、RRT* | move_base、move_base_flex |
| 运动控制 | PID、前馈、MPC | ros2_control、moveit2 |
| 机器视觉 | 目标检测(YOLO)、位姿估计(PnP) | OpenCV、OpenVINO |
🔹 5. 应用层(真实落地场景)
| 场景 | 技术栈示例 |
|---|---|
| 移动机器人 | ROS 2 + Cartographer + DWA + RealSense |
| 机械臂 | MoveIt2 + OMPL + ros2_control + Dynamixel |
| 无人机 | PX4 + MAVROS + VINS-Fusion |
| AGV/AMR | ROS Navigation2 + LiDAR + SLAM Toolbox |
🧪 零基础“1-2-3 步”上手路线
-
跑通 Hello Robot
买一台 TurtleBot3 / 树莓派小车 → 烧录 Ubuntu + ROS 2 → 键盘遥控移动。 -
做一个小 SLAM
激光雷达 +slam_toolbox→ RViz 实时建图 → 保存.pgm地图。 -
加自主导航
使用 Navigation2 → 设定目标点 → 小车自动避障前往。
📚 常用开源资源速查表
| 名称 | 一句话 | 地址 |
|---|---|---|
| ROS 2 官方教程 | 机器人软件事实标准 | docs.ros.org |
| MoveIt2 | 机械臂运动规划 | moveit.ros.org |
| PX4 开发者指南 | 无人机固件 | docs.px4.io |
| book《Probabilistic Robotics》 | SLAM 圣经 | PDF 可搜 |
| 课程《Modern Robotics》 | 李群+运动学 | Northwestern 公开课 |
✅ 一句话总结
机器人 = 数学(矩阵/优化) + 硬件(电机/传感器) + 软件(ROS 2) + 算法(SLAM/规划) 的交叉系统。
先跑通“小车建图 + 导航”这个小闭环,再按上面地图逐层深挖,就能在机器人领域稳步升级。
工业机器人简介
工业机器人(Industrial Robot)= 机械臂 + 控制器 + 示教器 + 现场总线 + 工艺软件
下面按“1 张总览图 + 6 大模块 + 3 条上手路线”给你速通工业机器人的必备基础知识。
🔧 1. 总览图(记住这张图,就能定位任何知识点)
┌────────────┐ ┌────────────┐ ┌────────────┐
│ 机械本体 │◄──►│ 控制器 │◄──►│ 示教器/PC │
│ (6 轴/SCARA│ │(柜/驱控一体)│ │(TP/UI) │
└────┬───────┘ └────┬───────┘ └────┬───────┘
│ │ │
│ IO/总线 │ 运动指令 │ 工艺程序
┌────▼───────┐ ┌────▼───────┐ ┌────▼───────┐
│ 末端执行器│ │ 现场总线 │ │ 工艺算法 │
│(焊枪/吸盘)│ │(EtherCAT)│ │(焊接/码垛)│
└───────────┘ └───────────┘ └───────────┘📚 2. 六大知识模块
表格
复制
| 模块 | 关键概念 | 一句话速记 |
|---|---|---|
| ① 机械本体 | 6 轴串联、SCARA、Delta、协作机器人 | “轴数越多,灵活度越高,刚性越低” |
| ② 运动学 | 正解(笛卡尔→关节)、逆解(关节→笛卡尔)、DH 参数 | “FK 易,IK 难” |
| ③ 控制器 | 实时操作系统、伺服环 1 kHz、轨迹插补、动力学补偿 | “控制器=工业机器人的大脑” |
| ④ 示教与编程 | 示教器(TP)、在线/离线编程、Rapid/TP 语言、G-Code | “先示教,再自动运行” |
| ⑤ 现场通讯 | EtherCAT、Profinet、Modbus-TCP、IO-Link | “实时性:EtherCAT < 1 ms” |
| ⑥ 工艺应用 | 焊接、搬运、喷涂、打磨、码垛、3C 装配 | “工艺包 = 机器人+末端+工艺算法” |
🧮 3. 必须记住的 5 个公式
表格
复制
| 公式 | 场景 |
|---|---|
| 齐次变换 T = [R t; 0 1] | 4×4 矩阵一次完成旋转+平移 |
| 逆运动学 θ = IK(x,y,z,rx,ry,rz) | 把笛卡尔目标变成关节角 |
| 雅可比 J = ∂x/∂θ | 速度与力映射 |
| 轨迹插补 S-curve | 平滑启停,减少机械冲击 |
| 动力学 τ = M(θ)θ̈ + C(θ,θ̇) + G(θ) | 计算关节力矩 |
🛠️ 4. 主流品牌速览
表格
复制
| 品牌 | 特色 | 控制器语言 |
|---|---|---|
| ABB | 协作机器人 + RobotStudio 离线 | RAPID |
| FANUC | 高可靠性 + iRVision | TP/Karel |
| KUKA | 开放平台 + ROS 驱动 | KRL |
| YASKAWA | 高速搬运 + Sigma7 伺服 | INFORM |
| 埃斯顿/汇川 | 国产高性价比 | ESTUN/INOVANCE 语言 |
🚀 5. 三条上手路线(按投入时间)
表格
复制
| 路线 | 0-1 周 | 1-4 周 | 1-3 月 |
|---|---|---|---|
| 📱 仿真路线 | RobotStudio / RoboDK 离线 | 创建虚拟工作站 | 完整搬运/焊接 demo |
| 🧪 开源机器人 | ROS-Industrial + MoveIt + Gazebo | 驱动 UR5 虚拟 | 真实 UR 协作臂 |
| 🏭 现场路线 | 示教器点动 + 简单示教 | 编写 TP 程序 | 集成 PLC + 视觉 |
📦 6. 工具/资源清单
| 类别 | 名称 | 一句话 |
|---|---|---|
| 仿真 | RobotStudio, RoboDK, Gazebo | 零成本试错 |
| 离线编程 | ABB RobotStudio, FANUC ROBOGUIDE | 真机 1:1 复现 |
| 学习资料 | 《工业机器人技术基础》教材、ABB 官方 eLearning | 免费视频 |
| 开源驱动 | ros-industrial/universal_robots, ros-industrial/fanuc |
即插即用 ROS |
| 证书 | ABB IRC5、FANUC CRX 认证 | 求职加分 |
✅ 一句话总结
工业机器人 = “机械臂 + 实时控制器 + 工艺软件” 的三位一体;
先把 “6 轴正逆解 + EtherCAT 通讯 + 示教器编程” 这三关打通,就能在 90% 的产线场景里“独立上岗”。
主要内容
系统组成
由三大部分6个子系统组成。传送带、机器人本体、外围系统控制柜、控制柜、示教器。网络服务器、电脑、U盘
示教器:是输入和读取的设备。通过U盘进行备份。
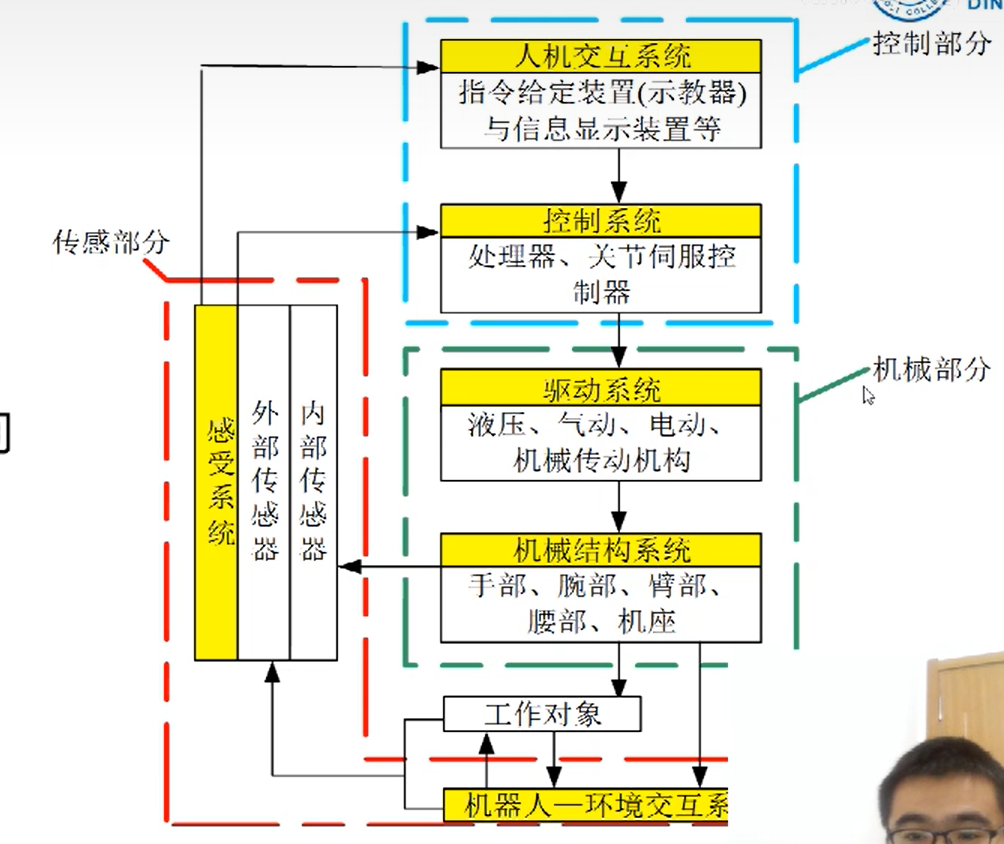
机械部分
用于实习各种动作,包括:机械结构和驱动系统。
机械结构系统
工业机器人的机械结构系统又称为执行机构,也称操作机,通常由杆件和关节组成。
从功能角度,执行机构可分为:
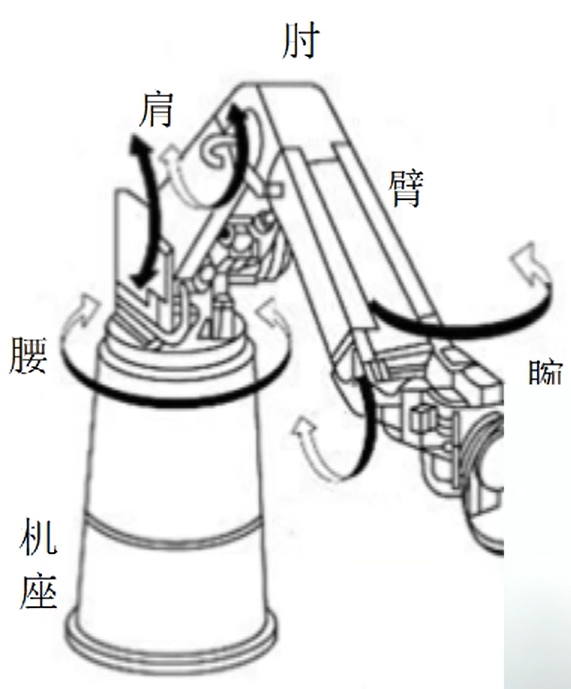
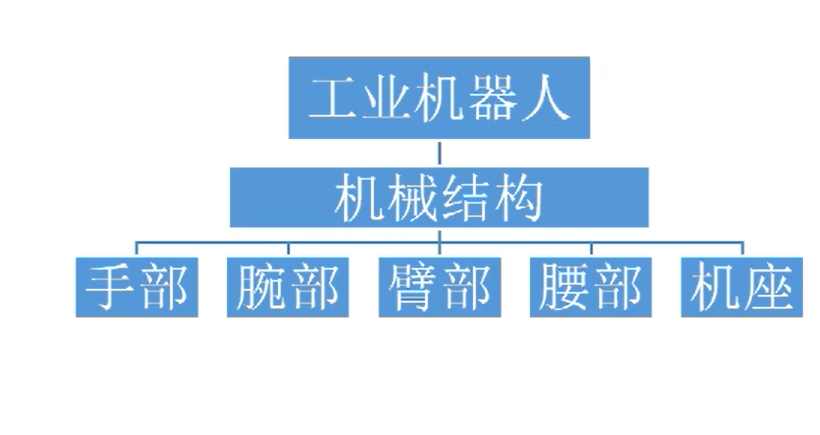
手部:末端执行器,其作用是直接抓取和放置物件。
腕部:连接手部和臂部的部件,其作用是调整或改变手部的姿态。
臂部:手臂,用以连接腰部和腕部,用以带动腕部运动。
腰部:立柱,是支撑手臂的部件,其作用是带动臂部运动,与臂部运动结合,把腕部传递到需到的工作位置。
机座:机座分为固定式和移动式。
驱动系统
工业机器人的驱动系统包括驱动器和传动机构两部分,他们通常与执行机构连成机器人本体。
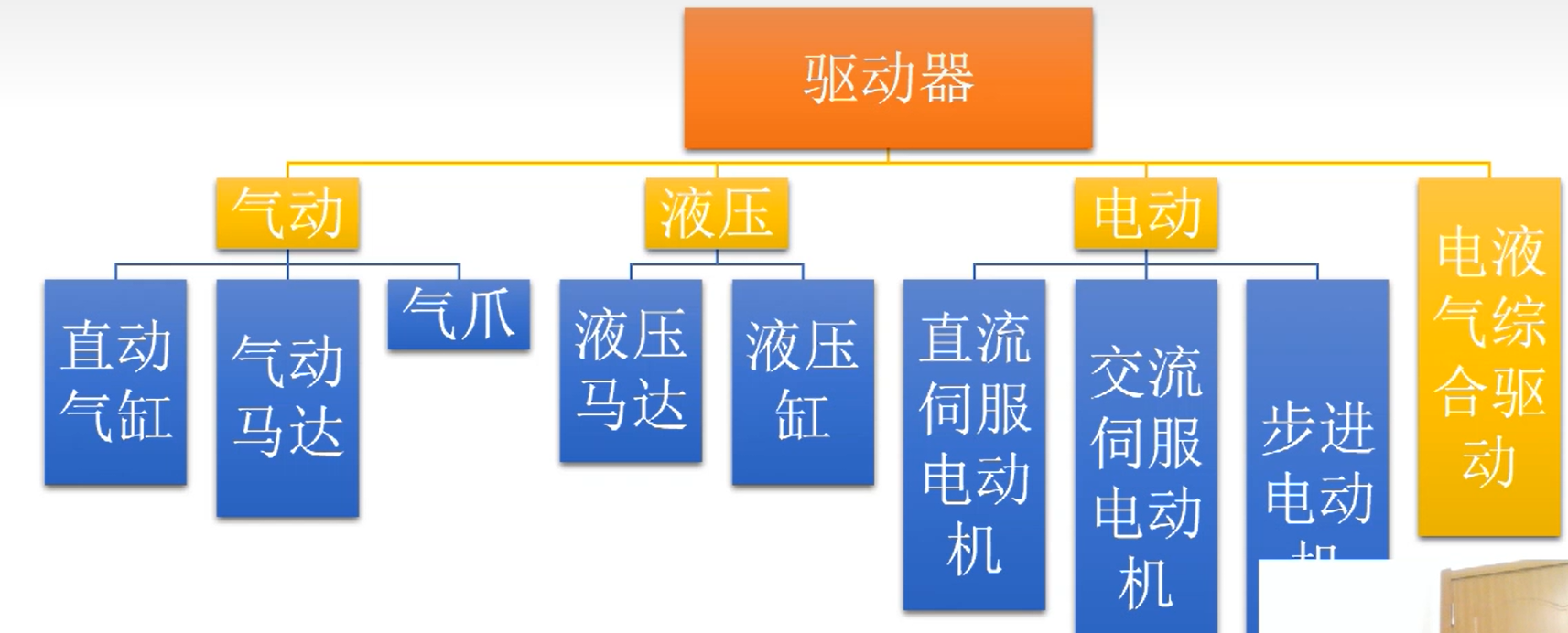
驱动器
各种电、液、气装置。电机驱动:直流伺服电机、步进电机、交流伺服电机。
液压驱动、气动驱动。
传动机构
传动机构常见的有:谐波减速器、滚珠丝杆、链、带以及各种齿轮系。
控制部分
控制机器人完成各种动作,人机交互系统和控制系统。
人机交互系统
是使操作人员参与机器人控制并与机器人进行联系的装置。该系统归纳起来分为两大类:指令给定装置和信息显示装置。
控制系统
工业机器人的控制系统一般由控制计算机和伺服控制器组成。
控制计算机不仅可以发出指令,协调各关节驱动之间的运动,同时要完成编程、示教/再现,在其他环境状态(传感器信息)、工艺要求,外部相关设备(电焊机)之间传递信息和协调工作。
伺服控制器控制各个关节的驱动器。
传感部分
用于感知内部和外部的信息,包括:感受系统和机器人——环境交互系统。
感受系统
感受系统包括内部检测系统和外部检测系统两部分。
内部检测系统的作用就是通过各种检测器,检测执行机构的运动状况,根据需要反馈给控制系统,与设定值进行比较后对执行机构进行调整以保证其动作符合设计需求。
外部检测系统检测机器人所处环境、外部物体状态或机器人与外部物体的关系。

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 13
13 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)