OpenCV编程-(图像进阶处理技术:模板匹配、轮廓检测与图像分割)
本文介绍了三种计算机视觉核心技术:模板匹配、轮廓检测和图像分割。模板匹配通过滑动窗口计算相似度定位目标,适用于物体检测;轮廓检测通过像素连通性提取物体边界,用于形状分析;图像分割则包含阈值分割、边缘分割等算法,将图像划分为语义区域。文章详细阐述了各技术的原理、实现步骤和OpenCV代码示例,包括模板匹配的相似度计算方法、轮廓特征提取技巧,以及分水岭算法的完整实现流程。这些技术在工业检测、医学成像等
一、模板匹配技术
1.1 技术概述
模板匹配(Template Matching)是一种在大图像中定位特定子图像(模板) 的核心技术。该技术通过将模板图像在目标图像上滑动,逐像素计算模板与目标图像局部区域的相似度,从而确定最佳匹配位置。模板匹配广泛应用于目标检测、工业零件定位及视频监控中的运动物体跟踪等场景。
1.2 工作原理
模板匹配的核心流程包含三个关键阶段:
-
输入准备:
-
目标图像(Source Image):待搜索的大尺寸图像
-
模板图像(Template Image):需定位的子图像
-
-
相似度计算:
-
模板在目标图像上以滑动窗口方式移动
-
每个位置计算模板与目标局部区域的相似度
-
常用相似度度量方法:
方法类型 最佳匹配指示 平方差匹配(TM_SQDIFF) 最小值 归一化平方差匹配 最小值 相关匹配(TM_CCORR) 最大值 相关系数匹配(TM_CCOEFF) 最大值
-
-
结果输出:
-
生成结果矩阵
-
通过极值定位(minMaxLoc)确定最佳匹配位置
-
代码示例
void templateMatching(Mat src, Mat templ, Mat result, int method)
{
// 1. 先定义输出的结果矩阵
// 高=目标的高-模板的高+1
// 宽=目标的宽-模板的宽+1
int h = src.rows - templ.rows + 1;
int w = src.cols - templ.cols + 1;
Mat matchResult = Mat::zeros(h, w, CV_32FC1);
// 2.做模板匹配
matchTemplate(src, templ, matchResult, method);
// 3. 寻找最大值和最小值(获取最佳匹配位置)
double minValue, maxValue;
Point minLoc, maxLoc;
minMaxLoc(matchResult, &minValue, &maxValue, &minLoc, &maxLoc);
rectangle(src, minLoc, Point(minLoc.x + templ.cols, minLoc.y + templ.rows), Scalar(0, 0, 255), 2, 8, 0);
// 4. 绘制矩形
rectangle(src, maxLoc, Point(maxLoc.x + templ.cols, maxLoc.y + templ.rows), Scalar(0, 255, 0), 2, 8, 0);
// 5. 显示结果
imshow("匹配结果", src);
}1.3 代码实现
OpenCV提供matchTemplate()函数实现核心功能:
void matchTemplate(
InputArray image, // 目标图像
InputArray templ, // 模板图像
OutputArray result, // 匹配结果矩阵(CV_32FC1)
int method, // 匹配方法枚举值
InputArray mask = noArray() // 掩码(部分方法有效)
);完整实现流程:
void runTemplateMatching(Mat& targetImage, Mat& templateImage) {
// 1. 创建结果矩阵
int cols = targetImage.cols - templateImage.cols + 1;
int rows = targetImage.rows - templateImage.rows + 1;
Mat result(Size(cols, rows), CV_32FC1);
// 2. 执行模板匹配(归一化相关系数法)
matchTemplate(targetImage, templateImage, result, TM_CCOEFF_NORMED);
// 3. 定位最佳匹配位置
double minVal, maxVal;
Point minLoc, maxLoc;
minMaxLoc(result, &minVal, &maxVal, &minLoc, &maxLoc);
// 4. 绘制矩形标记匹配区域
rectangle(targetImage,
maxLoc,
Point(maxLoc.x + templateImage.cols, maxLoc.y + templateImage.rows),
Scalar(0, 255, 0), 2);
// 5. 显示结果
imshow("Template", templateImage);
imshow("Matching Result", targetImage);
}二、轮廓检测技术
2.1 技术概述
轮廓检测(Contour Detection)旨在提取图像中物体的精确边界,通过分析像素连通性生成连续边缘点集合。该技术是形状分析、目标跟踪和字符识别的基础,广泛应用于工业检测、医学成像和地理信息系统等领域。
2.2 实现原理
轮廓检测包含四个关键阶段:
-
图像预处理:
-
灰度转换:
cvtColor(src, gray, COLOR_BGR2GRAY) -
二值化处理:
threshold(gray, binary, 0, 255, THRESH_OTSU | THRESH_BINARY_INV) -
边缘增强(可选):Canny/Sobel算子
-
-
轮廓提取:
vector<vector<Point>> contours; vector<Vec4i> hierarchy; findContours(binary, contours, hierarchy, RETR_TREE, CHAIN_APPROX_NONE); -
轮廓后处理:
-
噪声过滤:基于面积/周长阈值
-
轮廓近似:减少多边形点数
-
特征计算:面积/周长/几何中心
-
-
结果可视化:
drawContours(result, contours, -1, Scalar(0,255,0), 2);
2.3 进阶应用
2.3.1 轮廓特征计算
// 计算轮廓面积
double area = contourArea(contour);
// 计算轮廓周长
double perimeter = arcLength(contour, true);
// 按周长过滤轮廓示例
for (size_t i=0; i<contours.size(); ++i) {
if(arcLength(contours[i], true) > 400) {
drawContours(result, contours, i, Scalar(0,255,0), 2);
}
}2.3.2 轮廓近似
vector<vector<Point>> approxContours(contours.size());
for (size_t i=0; i<contours.size(); ++i) {
// 精度=轮廓周长×0.02
double epsilon = 0.02 * arcLength(contours[i], true);
approxPolyDP(contours[i], approxContours[i], epsilon, true);
}2.3.3 几何特征计算
// 最小外接矩形
RotatedRect minRect = minAreaRect(contours[i]);
Point2f vertices[4];
minRect.points(vertices);
for(int j=0; j<4; j++) {
line(src, vertices[j], vertices[(j+1)%4], Scalar(0,0,255), 2);
}
// 最小外接圆
Point2f center;
float radius;
minEnclosingCircle(contours[i], center, radius);
circle(src, center, radius, Scalar(0,0,255), 2);2.3.4 代码实现
void findContours(Mat src, Mat templ, Mat result, int mode, int method)
{
// 1.转为灰度图像
Mat gray;
cvtColor(src, gray, COLOR_BGR2GRAY);
// 2.转为二值图像
Mat binary;
threshold(gray, binary, 0, 255, THRESH_BINARY | THRESH_OTSU);
// 3.在二值图像查找图像的点
vector<vector<Point>> contours; // 用来装轮廓的点
vector<Vec4i> hierarchy; // 用来装轮廓的索引
findContours(binary, contours, hierarchy, RETR_TREE, CHAIN_APPROX_NONE); // 轮廓发现函数
// 4. 打印轮廓的面积与周长
for (int i = 0; i < contours.size(); i++)
{
// 1.3 轮廓面积与周长
// 1. 计算轮廓的面积
double area = contourArea(contours[i]);
// 2. 计算轮廓的周长
double length = arcLength(contours[i], true);
cout << "第" << i << "个轮廓的面积为:" << area << "周长为:" << length << endl;
// 只绘制面积>1000的轮廓
if (area > 1000)
{
drawContours(src, contours, i, Scalar(0, 255, 0), -1);
}
}
// 4.绘制轮廓
// drawContours(src, contours, -1, Scalar(0, 255, 0), -1);
// 5.展示
imshow("轮廓检测", src);
}三、图像分割技术
3.1 技术分类与应用
图像分割将图像划分为语义一致的独立区域,是计算机视觉的基础任务:
分割类型 原理 最佳应用场景 阈值分割 基于像素灰度分布 文档扫描、OCR 边缘分割 利用梯度不连续性 物体轮廓提取 区域分割 相似性区域合并 医学图像分析 分水岭算法 模拟水漫地形过程 重叠物体分离 深度学习分割 卷积神经网络特征学习 复杂场景理解
3.2 阈值分割技术
3.2.1 全局阈值法
double threshold(
InputArray src, // 输入图像(8UC1)
OutputArray dst, // 输出图像
double thresh, // 阈值
double maxval, // 最大值(通常255)
int type // 阈值类型
);阈值类型对比:
类型 效果 THRESH_BINARY 标准二值化 THRESH_BINARY_INV 反相二值化 THRESH_TRUNC 截断处理 THRESH_OTSU 双峰图像分割
3.2.2 自适应阈值
void adaptiveThreshold(
InputArray src, // 输入图像(8UC1)
OutputArray dst, // 输出图像
double maxValue, // 满足条件的像素值
int adaptiveMethod, // ADAPTIVE_THRESH_MEAN_C/ADAPTIVE_THRESH_GAUSSIAN_C
int thresholdType, // THRESH_BINARY/THRESH_BINARY_INV
int blockSize, // 邻域大小(奇数)
double C // 偏移常数
);void adaptiveThreshold(Mat src, Mat templ, Mat result, int method)
{
Mat gray, gray2;
cvtColor(src, gray, COLOR_BGR2GRAY);
cvtColor(src, gray2, COLOR_BGR2GRAY);
// 2. 自适应域阈值分割
adaptiveThreshold(gray, gray, 255, ADAPTIVE_THRESH_GAUSSIAN_C, THRESH_BINARY, 3, 5);
adaptiveThreshold(gray2, gray2, 255, ADAPTIVE_THRESH_MEAN_C, THRESH_BINARY, 3, 5);
imshow("自适应域阈值分割(均值法)", gray2);
imshow("自适应域阈值分割(高斯法)", gray);
}3.3 边缘分割技术
基于Canny边缘检测实现:
Mat gray, edges, segmented;
cvtColor(src, gray, COLOR_BGR2GRAY);
GaussianBlur(gray, gray, Size(5,5), 1.5);
Canny(gray, edges, 50, 150);
// 使用边缘作为掩码进行分割
src.copyTo(segmented, edges);void Canny(Mat src, Mat templ, Mat result, int method)
{
Mat gray;
// 高斯模糊-降噪
GaussianBlur(src, gray, Size(3, 3), 0);
// 灰度转换-二值化
cvtColor(gray, gray, COLOR_BGR2GRAY);
// Canny算子-边缘检测
Canny(gray, gray, 50, 150);
imshow("边缘检测", gray);
// 将边缘检测的结果作为掩膜
Mat dst = Mat::zeros(gray.size(), gray.type());
gray.copyTo(dst, gray);
// 3.2 模板匹配
matchTemplate(src, templ, result, method);
imshow("模板匹配", result);
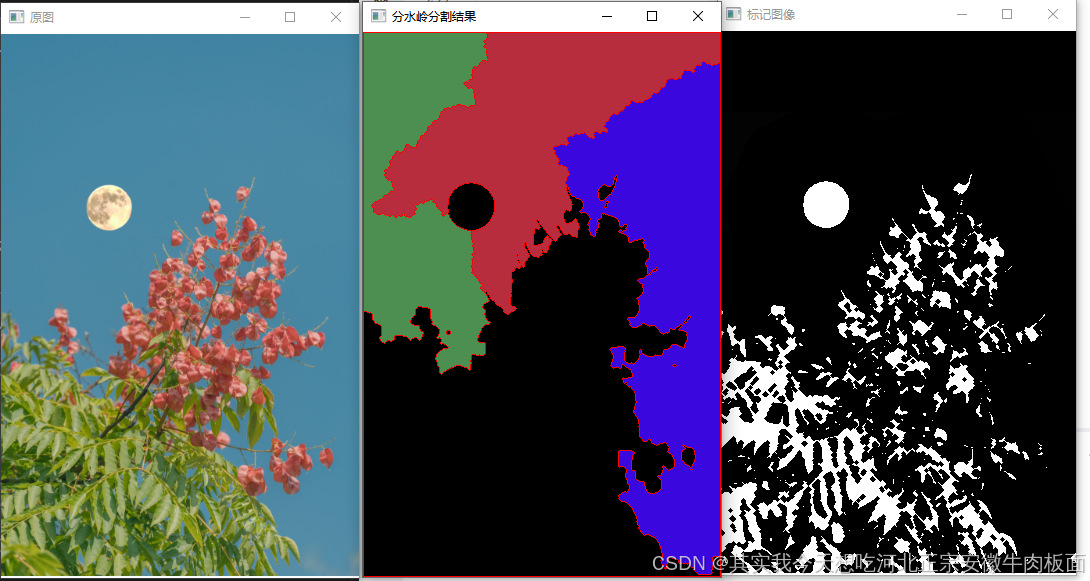
}3.4 分水岭算法
3.4.1 算法原理
分水岭算法将图像视为地形表面:
低灰度区域:山谷(集水盆地)
高灰度区域:山峰(分水岭)
水漫过程:
从局部最小值开始注水
水位上升时不同集水盆地汇合处形成分水岭
分水岭线即分割边界
3.4.2 实现步骤
void watershedSegmentation(Mat src, Mat &dst)
{
// 检查输入图像有效性
if (src.empty())
{
cerr << "[错误] 输入图像为空!" << endl;
return;
}
// 1. 图像预处理: 转为灰度图
Mat gray;
cvtColor(src, gray, COLOR_BGR2GRAY);
// 2. 二值化处理: 使用OTSU自动阈值分割
Mat binary;
threshold(gray, binary, 0, 255, THRESH_BINARY_INV | THRESH_OTSU);
// 添加形态学操作去除噪声
Mat kernel = getStructuringElement(MORPH_ELLIPSE, Size(3, 3));
morphologyEx(binary, binary, MORPH_OPEN, kernel, Point(-1, -1), 2);
// 3. 距离变换: 计算前景物体的距离图
Mat dist;
distanceTransform(binary, dist, DIST_L2, 3); // L2距离,3x3掩码
normalize(dist, dist, 0, 1.0, NORM_MINMAX); // 归一化到[0,1]范围
// 4. 生成种子点: 基于距离图阈值化
Mat distThresh;
double maxVal;
minMaxLoc(dist, nullptr, &maxVal); // 找到距离图最大值
threshold(dist, distThresh, 0.7 * maxVal, 1.0, THRESH_BINARY); // 保留70%最大值以上区域
distThresh.convertTo(distThresh, CV_8U); // 转为8位无符号整数
// 5. 标记连通组件作为分水岭种子
vector<vector<Point>> contours;
findContours(distThresh, contours, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
// 创建标记矩阵 (必须是32位有符号整数类型)
Mat markers = Mat::zeros(src.size(), CV_32S);
for (int i = 0; i < contours.size(); i++)
{
// 用不同的正整数标记不同的前景物体
drawContours(markers, contours, i, Scalar(i + 1), -1);
}
// 用255标记背景区域
markers.setTo(255, binary == 0);
// 6. 执行分水岭算法
Mat markers8u;
markers.convertTo(markers8u, CV_8U, 1.0); // 转换为8位以便显示
imshow("标记图像", markers8u);
// 应用分水岭算法 (输入图像需为彩色图)
watershed(src, markers);
// 7. 生成分割结果
dst = Mat::zeros(src.size(), CV_8UC3);
vector<Vec3b> colors;
RNG rng(12345);
for (int i = 0; i < contours.size() + 1; i++)
{
// 为每个区域生成随机颜色
Vec3b color = Vec3b(rng.uniform(0, 256), rng.uniform(0, 256), rng.uniform(0, 256));
colors.push_back(color);
}

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 26
26 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)