双目标定操作及配套代码、鱼眼单目标定
双目相机标定流程与验证 本文详细介绍了双目相机的标定流程,主要包括四个关键步骤:图像采集、单目内参标定、双目外参标定和结果验证。标定过程中强调图像多样性(多角度、多距离)对精度的影响,建议采用"三个距离+三个角度+两个高度"的拍摄原则。标定完成后需通过重投影误差(应<1像素)、基线长度一致性和极线对齐等多维度验证标定质量。实验表明,MATLAB在特征点匹配精度上优于Ope
双目相机标定
一、整体流程概述
-
图像采集
- 拍摄多角度、多距离的标定板图像(如棋盘格),确保覆盖整个视场范围。
- 图像多样性是关键,避免因样本不足导致拟合误差。
-
单目相机内参标定
- 分别对两个摄像头单独进行内参标定。
- 同时标定双目标定时难以保证标定板充满画面,因此先分别标定各自内参以提高精度。
-
双目相机外参标定
- 在固定内参的前提下,使用新拍摄的图像计算两个相机之间的旋转和平移矩阵(外参)。
-
验证标定结果
- 重投影误差:平均误差应小于一个像素,越小越好。
- 外参合理性:平移向量模长应接近实际基线长度;若基线为水平方向,则图像对齐后左右图对应点应在同一水平线上(y坐标一致)或右图点与左图极线距离较小。
-
工具对比:OpenCV vs MATLAB
- 参考 知乎文章,MATLAB 在特征点匹配精度上通常优于 OpenCV。
-
标定板选择建议
- 棋盘格与圆形标定板各有优劣,可参考:棋盘格和圆形标定板对比分析。
二、详细操作步骤
1. 单目图像采集
- 原则:多角度、多距离拍摄,标定板尽量覆盖全画幅。
- 如果不拍全画幅,主点估计容易出错
- 如果缺少标定板在图像边缘的图像,则对畸变标定不友好,因为畸变越靠近边缘越大,越好标定
-
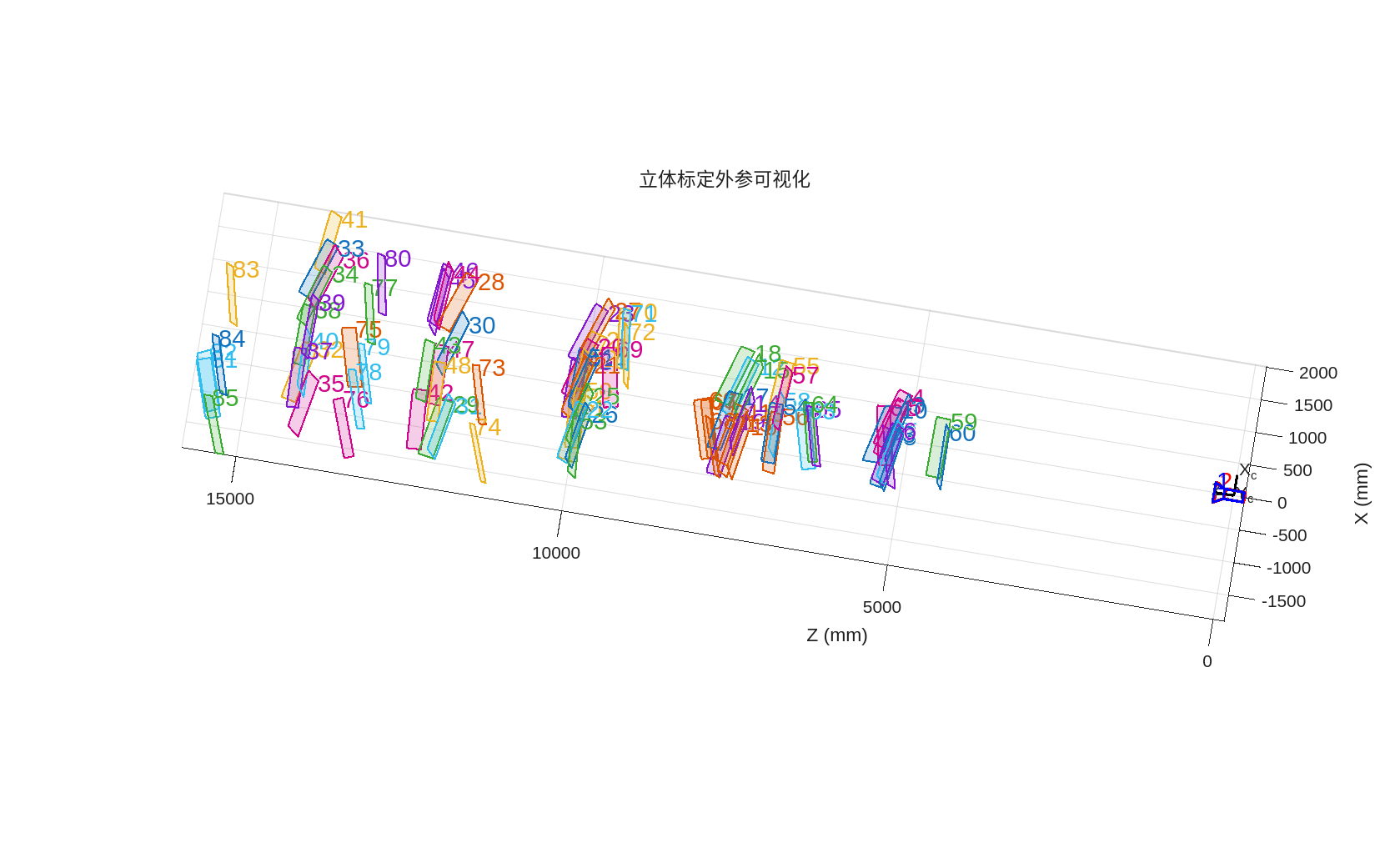
示例图像:
如上图所示,本次标定 X 轴范围为 -2000mm 至 1500mm,Y 轴为 -500mm 至 1500mm,Z 轴为 -5000mm 至 15000mm。
实际中建议按“三个距离 + 三个角度 + 两个高度”原则拍摄,具体范围根据研究深度确定(如 1000mm–5000mm),相机和标定板的位置尽量覆盖研究区域,以提升参数拟合精度。
- 效果验证:
对应重投影误差为0.12 pixel,表明标定精度较高。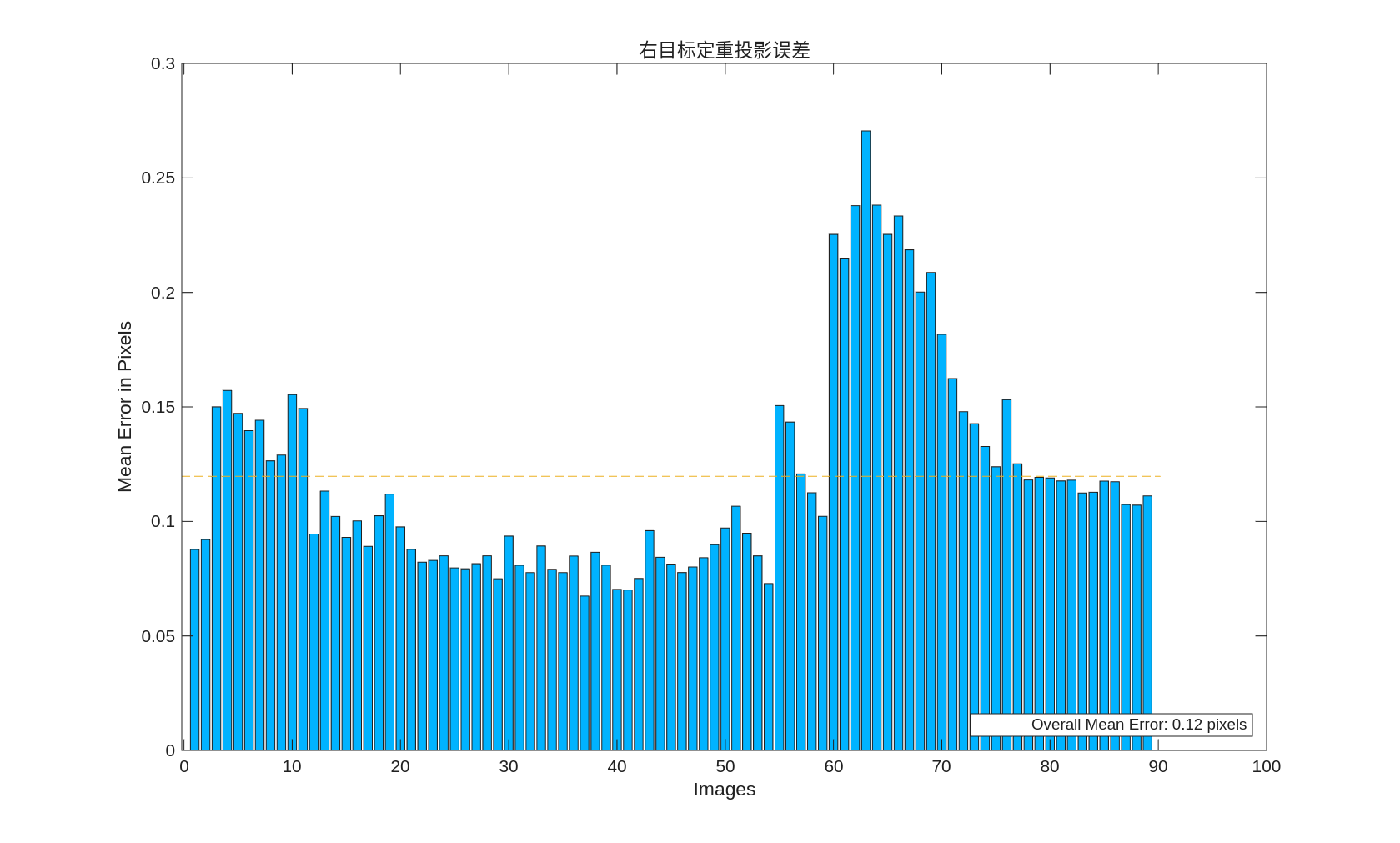
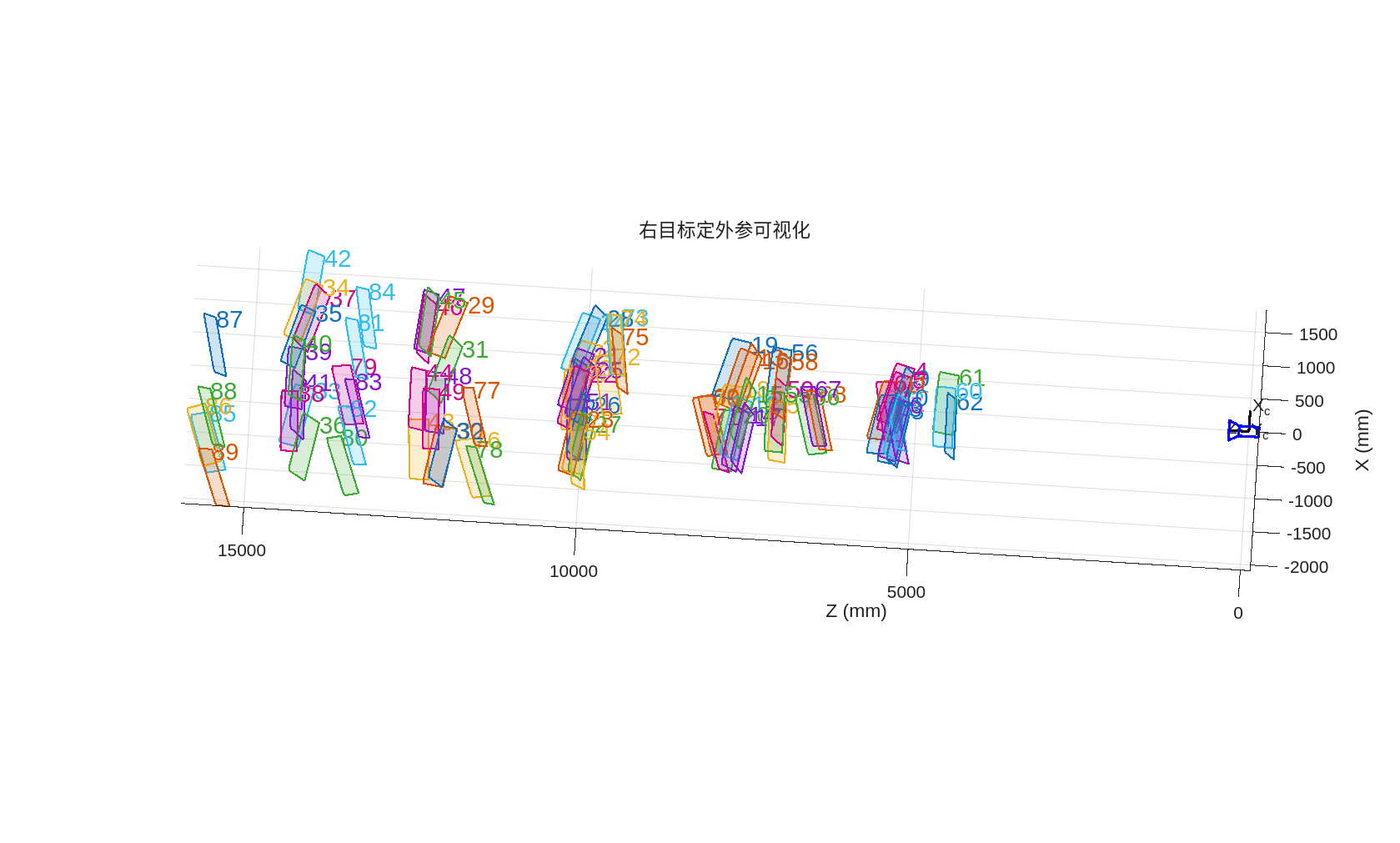
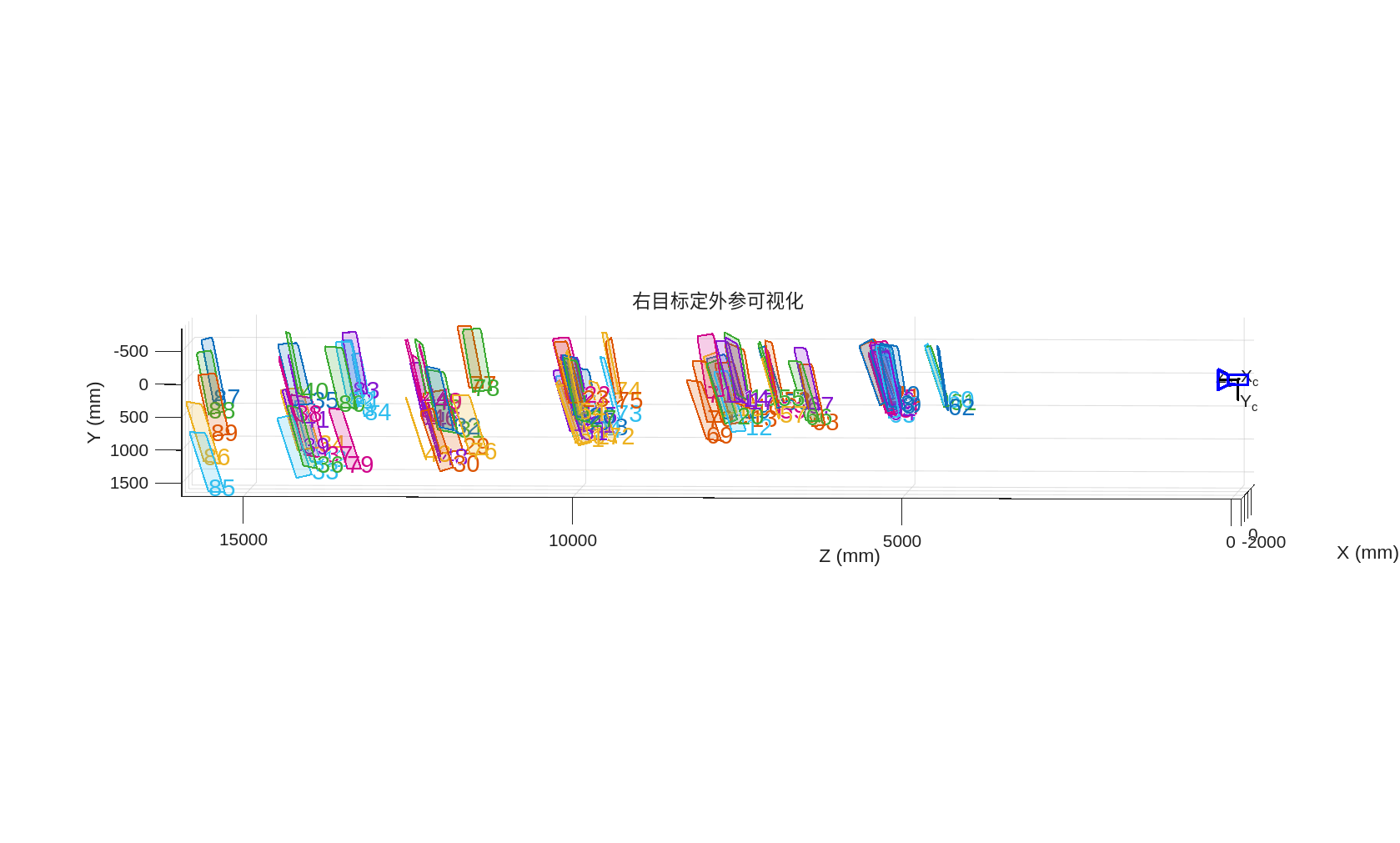
2. 双目图像采集
-
注意事项:
- 角度不足会导致外参平移量误差较大。
- 建议手动测量基线长度辅助判断标定结果可靠性。
-
图像分布示意图:
-
重投影误差验证:
注意:重投影误差小并不代表标定结果一定可靠,仍需检查基线长度一致性以及图像对齐后特征点是否位于同一行(基线水平)或同一列(基线竖直)。
三、总结建议
- 标定图像需涵盖完整视场范围,避免过拟合;
- 内参与外参分开标定有助于提高稳定性;
- 多种验证方式结合(重投影误差 + 基线长度 + 极线对齐)更能判断标定质量;
- 工具选择上,MATLAB 精度更高,OpenCV 更易集成于工程系统。
四、代码
1.双目标定
下面给出matlab下的圆形标定代码:
clc;
clear;
close all;
% 参数设置
rows = 10; % 圆点行数 (例如 4 行)
cols = 19; % 圆点列数 (例如 11 列)
spacing = 100; % 圆点间距 (单位:毫米)
% 创建非对称圆网格的世界坐标
worldPoints = generateCircleGridPoints([rows, cols], spacing);
date = '20250619';
% 加载左右相机图像路径
leftImageDir = fullfile('/home/erge/work/Aceii/calibration/photos', date, 'leftSingleImage'); % 替换为左相机图像文件夹路径
rightImageDir = fullfile('/home/erge/work/Aceii/calibration/photos', date, '/rightSingleImage'); % 替换为右相机图像文件夹路径
left_stereo_path = fullfile('/home/erge/work/Aceii/calibration/photos', date,'/leftImage');
right_stereo_path = fullfile('/home/erge/work/Aceii/calibration/photos', date,'/rightImage');
%% 单目
leftImageFiles = dir(fullfile(leftImageDir, '*.png'));
rightImageFiles = dir(fullfile(rightImageDir, '*.png'));
leftImagePaths = {leftImageFiles.name};
rightImagePaths = {rightImageFiles.name};
% 初始化存储检测到的图像点
rightImagePoints = [];
leftImagePoints = [];
for i = 1:length(leftImagePaths)
imgPath = fullfile(leftImageDir, leftImagePaths{i});
I = imread(imgPath);
% 检测圆网格
detectedPoints = detectCircleGridPoints(I, [rows, cols]);
if ~isempty(detectedPoints) % 检查是否成功检测到圆网格
fprintf('成功检测到圆网格:%s\n', leftImagePaths{i});
leftImagePoints= cat(3, leftImagePoints, detectedPoints); % 将检测到的点添加到 imagePoints
else
fprintf('未能检测到圆网格:%s\n', leftImagePaths{i});
end
end
for i = 1:length(rightImagePaths)
imgPath = fullfile(rightImageDir, rightImagePaths{i});
I = imread(imgPath);
% 检测圆网格
detectedPoints = detectCircleGridPoints(I, [rows, cols]);
if ~isempty(detectedPoints) % 检查是否成功检测到圆网格
fprintf('成功检测到圆网格:%s\n', rightImagePaths{i});
rightImagePoints= cat(3, rightImagePoints, detectedPoints); % 将检测到的点添加到 imagePoints
else
fprintf('未能检测到圆网格:%s\n', rightImagePaths{i});
end
end
% 单目标定(分别标定左右相机)
[leftCamParams, leftReprojectionErrors] = estimateCameraParameters(leftImagePoints, ...
worldPoints, ...
'ImageSize', size(I,1:2));
[rightCamParams, rightReprojectionErrors] = estimateCameraParameters(rightImagePoints, ...
worldPoints, ...
'ImageSize', size(I,1:2));
% 可视化重投影误差
figure;
showReprojectionErrors(leftCamParams);
title('左目标定重投影误差');
% 可视化外参
figure;
showExtrinsics(leftCamParams);
title('左目标定外参可视化');
% 可视化重投影误差
figure;
showReprojectionErrors(rightCamParams);
title('右目标定重投影误差');
% 可视化外参
figure;
showExtrinsics(rightCamParams);
title('右目标定外参可视化');
%% 立体标定
left_stereo_file = dir(fullfile(left_stereo_path, '*.png'));
right_stereo_file = dir(fullfile(right_stereo_path, '*.png'));
% 提取左文件名
file_names = {left_stereo_file.name};
% 提取文件名中的数字部分
numbers = zeros(length(file_names), 1);
for i = 1:length(file_names)
% 假设文件名格式为 "prefix<number>.png",提取数字部分
[~, name_without_ext] = fileparts(file_names{i});
numbers(i) = str2double(regexp(name_without_ext, '\d+', 'match', 'once'));
end
% 按数字排序
[~, sort_idx] = sort(numbers);
% 获取排序后的文件列表
left_stereo_file = left_stereo_file(sort_idx);
% 提取右文件名
file_names = {right_stereo_file.name};
% 提取文件名中的数字部分
numbers = zeros(length(file_names), 1);
for i = 1:length(file_names)
% 假设文件名格式为 "prefix<number>.png",提取数字部分
[~, name_without_ext] = fileparts(file_names{i});
numbers(i) = str2double(regexp(name_without_ext, '\d+', 'match', 'once'));
end
% 按数字排序
[~, sort_idx] = sort(numbers);
% 获取排序后的文件列表
right_stereo_file = right_stereo_file(sort_idx);
left_stereo_name = {left_stereo_file.name};
right_stereo_name = {right_stereo_file.name};
% 初始化存储检测到的图像点
rightImagePoints = [];
leftImagePoints = [];
% image_path
% 假设 left_stereo_name 和 right_stereo_name 的长度相同
for i = 1:length(left_stereo_name)
% 读取左图像并检测圆网格
leftImgPath = fullfile(left_stereo_path, left_stereo_name{i});
leftI = imread(leftImgPath);
leftDetectedPoints = detectCircleGridPoints(leftI, [rows, cols]);
% 读取右图像并检测圆网格
rightImgPath = fullfile(right_stereo_path, right_stereo_name{i});
rightI = imread(rightImgPath);
rightDetectedPoints = detectCircleGridPoints(rightI, [rows, cols]);
% 检查左右图像是否都成功检测到圆网格
if ~isempty(leftDetectedPoints) && ~isempty(rightDetectedPoints)
% 如果左右图像都成功检测到圆网格,则将点加入
fprintf('成功检测到圆网格:左图像 %s 和 右图像 %s\n', left_stereo_name{i}, right_stereo_name{i});
leftImagePoints = cat(3, leftImagePoints, leftDetectedPoints); % 将左图像检测到的点加入
rightImagePoints = cat(3, rightImagePoints, rightDetectedPoints); % 将右图像检测到的点加入
else
% 如果任意一个检测失败,则跳过,不加入任何点
fprintf('未能同时检测到圆网格:左图像 %s 或 右图像 %s\n', left_stereo_name{i}, right_stereo_name{i});
end
end
imagePoints= cat(4, leftImagePoints, rightImagePoints);
%
% [stereoParams, pairsUsed, estimationErrors] = estimateCameraParameters(imagePoints, ...
% worldPoints, 'ImageSize', size(I,1:2));
% 左右相机的初始内参矩阵和畸变系数
% camExtrinsics = estimateExtrinsics(imagePoints,worldPoints,intrinsics);
% 标定双目外参
[stereoParams, pairsUsed, ReprojectionErrors] = estimateStereoBaseline(...
imagePoints, worldPoints, ...
leftCamParams, rightCamParams); %并没有固定内参
% 显示标定结果
disp('左相机内参矩阵:');
disp(stereoParams.CameraParameters1.IntrinsicMatrix);
disp(leftCamParams.IntrinsicMatrix);
disp('右相机内参矩阵:');
disp(stereoParams.CameraParameters2.IntrinsicMatrix);
disp(rightCamParams.IntrinsicMatrix);
disp('径向畸变系数(左相机):');
disp(stereoParams.CameraParameters1.RadialDistortion);
disp(leftCamParams.RadialDistortion);
disp('径向畸变系数(右相机):');
disp(stereoParams.CameraParameters2.RadialDistortion);
disp(rightCamParams.RadialDistortion);
disp('旋转矩阵(从左相机到右相机):');
disp(stereoParams.RotationOfCamera2);
disp('平移向量(从左相机到右相机):');
disp(stereoParams.TranslationOfCamera2);
disp(norm(stereoParams.TranslationOfCamera2));
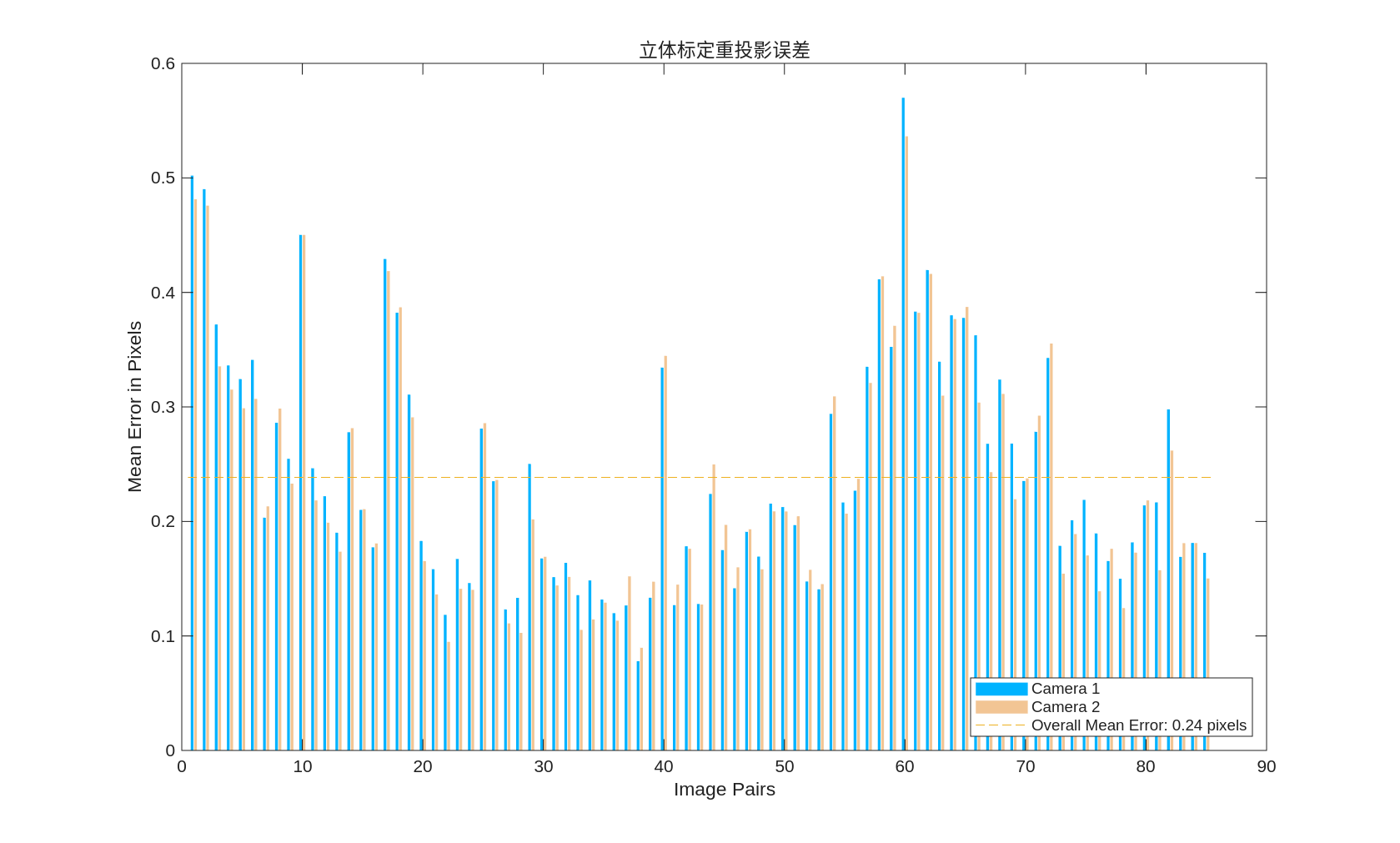
% 可视化重投影误差
figure;
showReprojectionErrors(stereoParams);
title('立体标定重投影误差');
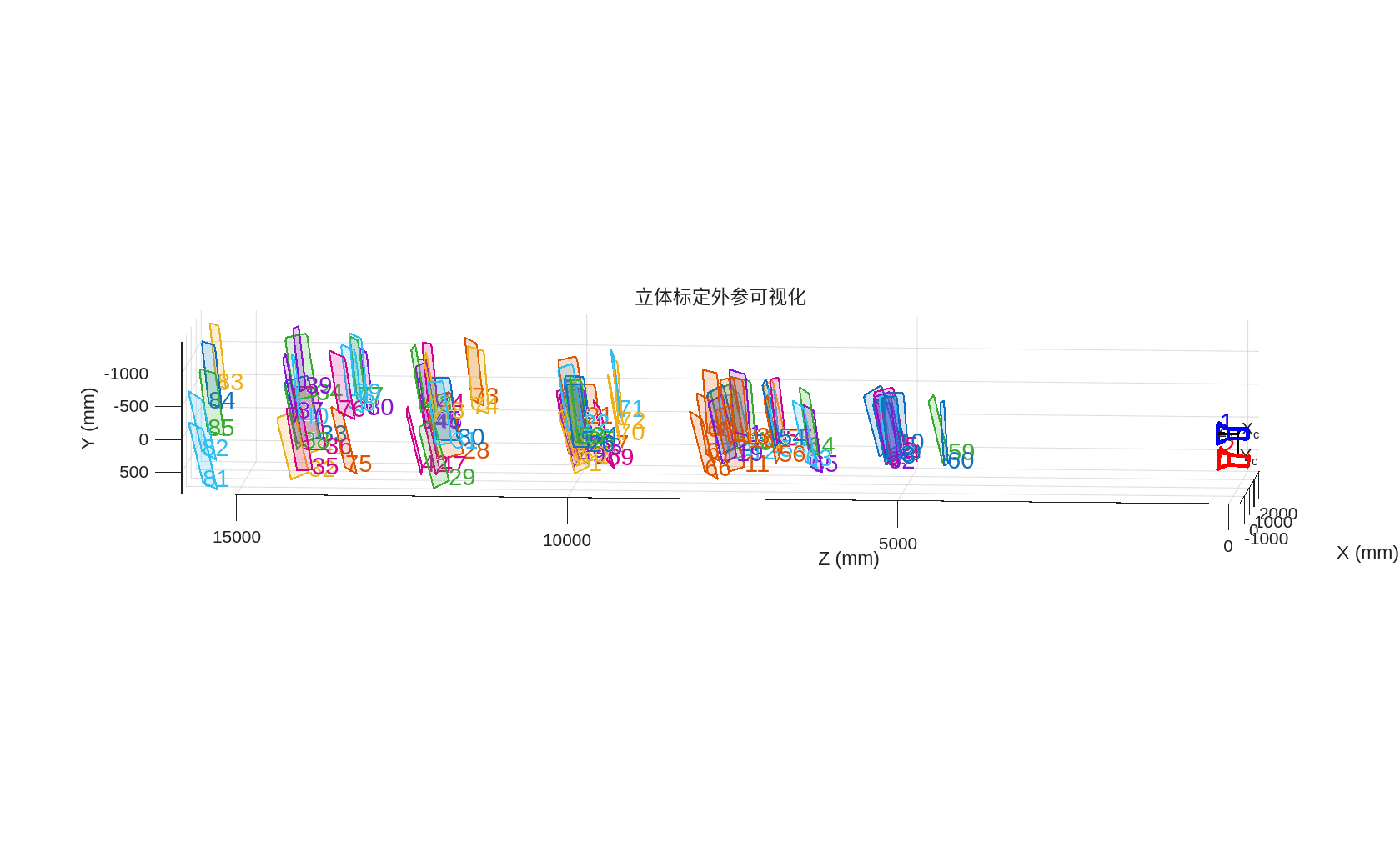
% 可视化外参
figure;
showExtrinsics(stereoParams);
title('立体标定外参可视化');
% % 4. 剔除误差过大的帧,使用了RANSAC,不一定需要这一步
% errorThreshold = 0.3;
% left_error = stereoParams.CameraParameters1.ReprojectionErrors;
% reight_error = stereoParams.CameraParameters2.ReprojectionErrors;
% 获取实际用于标定的帧索引
usedIndices = find(pairsUsed);
% 提取左右相机重投影误差
errorsLeft = stereoParams.CameraParameters1.ReprojectionErrors;
errorsRight = stereoParams.CameraParameters2.ReprojectionErrors;
% 计算每帧的平均误差(左右相机平均)
meanErrors = zeros(numel(usedIndices), 1);
for i = 1:numel(usedIndices)
idx = usedIndices(i);
% 左相机误差
errL = squeeze(errorsLeft(:, :,idx));
rmseL = mean(sqrt(sum(errL.^2, 2)));
% 右相机误差
errR = squeeze(errorsRight( :, :,idx));
rmseR = mean(sqrt(sum(errR.^2, 2)));
meanErrors(i) = (rmseL + rmseR) / 2;
end
% 设定阈值(例如均值+2倍标准差)
meanError = mean(meanErrors);
stdError = std(meanErrors);
threshold = meanError + 2 * stdError;
% 找到高误差帧的索引
badInUsed = find(meanErrors > threshold);
badIndices = usedIndices(badInUsed);
% 创建新索引,排除高误差帧
newPairsUsed = pairsUsed;
newPairsUsed(badIndices) = false;
% 提取有效角点数据
imagePointsLeftGood = leftImagePoints( :, :,newPairsUsed);
imagePointsRightGood = rightImagePoints( :, :,newPairsUsed);
imagePoints= cat(4, imagePointsLeftGood, imagePointsRightGood);
[stereoParams, pairsUsed, estimationErrors] = estimateCameraParameters(imagePoints, ...
worldPoints, 'ImageSize', size(I,1:2));
disp('平移向量(从左相机到右相机):');
disp(stereoParams.TranslationOfCamera2);
disp(norm(stereoParams.TranslationOfCamera2));
% 可视化重投影误差
figure;
showReprojectionErrors(stereoParams);
title('立体标定重投影误差');
% 可视化外参
figure;
showExtrinsics(stereoParams);
title('立体标定外参可视化');
%% 转为opencv格式并保存
[intrinsicMatrix1,distortionCoefficients1,intrinsicMatrix2, ...
distortionCoefficients2,rotationOfCamera2,translationOfCamera2] =...
stereoParametersToOpenCV(stereoParams);
save("result.mat","translationOfCamera2","rotationOfCamera2", ...
"distortionCoefficients2","intrinsicMatrix2","distortionCoefficients1","intrinsicMatrix1");
calibData.camera_left.K = intrinsicMatrix1;
calibData.camera_left.distortion = distortionCoefficients1;
calibData.camera_right.K = intrinsicMatrix2;
calibData.camera_right.distortion = distortionCoefficients2;
calibData.R = rotationOfCamera2;
calibData.T = translationOfCamera2;
fid = fopen('stereo_calibration.yaml', 'w');
fprintf(fid, '%%YAML:1.0\n');
% 写入 camera_left
fprintf(fid, 'camera_left:\n');
fprintf(fid, ' K:\n');
fprintf(fid, ' - [%f, %f, %f]\n', calibData.camera_left.K(1, :));
fprintf(fid, ' - [%f, %f, %f]\n', calibData.camera_left.K(2, :));
fprintf(fid, ' - [%f, %f, %f]\n', calibData.camera_left.K(3, :));
fprintf(fid, ' distortion: [%f, %f, %f, %f, %f]\n', calibData.camera_left.distortion);
% 写入 camera_right
fprintf(fid, 'camera_right:\n');
fprintf(fid, ' K:\n');
fprintf(fid, ' - [%f, %f, %f]\n', calibData.camera_right.K(1, :));
fprintf(fid, ' - [%f, %f, %f]\n', calibData.camera_right.K(2, :));
fprintf(fid, ' - [%f, %f, %f]\n', calibData.camera_right.K(3, :));
fprintf(fid, ' distortion: [%f, %f, %f, %f, %f]\n', calibData.camera_right.distortion);
% 写入 R 和 T
fprintf(fid, 'R:\n');
fprintf(fid, ' - [%f, %f, %f]\n', calibData.R(1, :));
fprintf(fid, ' - [%f, %f, %f]\n', calibData.R(2, :));
fprintf(fid, ' - [%f, %f, %f]\n', calibData.R(3, :));
fprintf(fid, 'T: [%f, %f, %f]\n', calibData.T(:)');
fclose(fid);
% 创建 Excel 文件
filename = [date,'.xlsx'];
% 写入每个参数到单独的工作表
writematrix(intrinsicMatrix1, filename, 'Sheet', 'IntrinsicMatrix1');
writematrix(distortionCoefficients1, filename, 'Sheet', 'DistortionCoefficients1');
writematrix(intrinsicMatrix2, filename, 'Sheet', 'IntrinsicMatrix2');
writematrix(distortionCoefficients2, filename, 'Sheet', 'DistortionCoefficients2');
writematrix(rotationOfCamera2, filename, 'Sheet', 'RotationOfCamera2');
writematrix(translationOfCamera2, filename, 'Sheet', 'TranslationOfCamera2');
disp(['数据已成功保存到 ', filename]);
2.鱼眼标定:
参考文章:https://blog.csdn.net/ouyangandy/article/details/107088939
圆形标定板的鱼眼标定代码,最后输出的是Scaramuzza模型:
clc;
clear;
close all;
% 参数设置
rows = 7; % 圆点行数 (例如 4 行)
cols = 7; % 圆点列数 (例如 7 列)
spacing = 40; % 圆点间距 (单位:毫米)
% 创建对称圆网格的世界坐标
worldPoints = generateCircleGridPoints([rows, cols], spacing,PatternType="symmetric");
imageDir = fullfile('/home/erge/python/Aceii/calibration/photos/single_fisheye/20250515');
%% 单目
imageFiles = dir(fullfile(imageDir, '*.jpg'));
imagePaths = {imageFiles.name};
calibrationImages = imageDatastore(imageDir);
imageFileNames = calibrationImages.Files;
% 初始化存储检测到的图像点
imagePoints = [];
for i = 1:length(imagePaths)
imgPath = fullfile(imageDir, imagePaths{i});
I = imread(imgPath);
% 检测圆网格
detectedPoints = detectCircleGridPoints(I, [rows, cols],PatternType="symmetric");
if ~isempty(detectedPoints) && size(detectedPoints,1)==rows*cols% 检查是否成功检测到圆网格
fprintf('成功检测到圆网格:%s\n', imagePaths{i});
imagePoints= cat(3, imagePoints, detectedPoints); % 将检测到的点添加到 imagePoints
figure(1);
imshow(I); hold on;
plot(detectedPoints(:,1), detectedPoints(:,2), 'y+');
hold off;
title(imagePaths{i})
pause();
close;
else
fprintf('未能检测到圆网格:%s\n', imagePaths{i});
end
end
% 单目标定
[camParams, reprojectionErrors] = estimateFisheyeParameters(imagePoints, ...
worldPoints, ...
[size(I,1) size(I,2)]);% 可视化重投影误差
figure;
showReprojectionErrors(camParams);
title('标定重投影误差');
% 可视化外参
figure;
showExtrinsics(camParams);
title('标定外参可视化');
J1 = undistortFisheyeImage(I,camParams.Intrinsics,'OutputView','full');
figure
imshowpair(I,J1,'montage')
title('Original Image (left) vs. Corrected Image (right)')
J2 = undistortFisheyeImage(I,camParams.Intrinsics,'OutputView','same', 'ScaleFactor', 0.5);
figure
imshow(J2)
title('Output View with low Scale Factor')
points = detectCheckerboardPoints(I);
[undistortedPoints,intrinsics1] = undistortFisheyePoints(points,camParams.Intrinsics);
[J, intrinsics2] = undistortFisheyeImage(I,camParams.Intrinsics,'OutputView','full'); %根据虚拟相机可得到归一化坐标
%% 转为opencv格式并保存
MappingCoefficients = camParams.Intrinsics.MappingCoefficients;
StretchMatrix = camParams.Intrinsics.StretchMatrix ;
DistortionCenter = camParams.Intrinsics.DistortionCenter;
ImageSize = camParams.Intrinsics.ImageSize;
save("resultSingleFishEye.mat","MappingCoefficients","StretchMatrix", ...
"DistortionCenter","ImageSize");
matlab使用的是Scaramuzza模型,标定后对图像的矫正代码如下:
// cam_model_general.h
#pragma once
#ifndef CAM_MODEL_GENERAL_H
#define CAM_MODEL_GENERAL_H
#include <opencv2/opencv.hpp>
// horner scheme for evaluating polynomials at a value x
template <typename T>
T horner(T *coeffs, int s, T x)
{
T res = 0.0;
for (int i = s - 1; i >= 0; i--)
res = res * x + coeffs[i];
return res;
}
// template class implementation of the general atan model
template <typename T>
class cCamModelGeneral
{
public:
// construtors
cCamModelGeneral() : c(T(1)),
d(T(0)),
e(T(0)),
u0(T(0)),
v0(T(0)),
p((cv::Mat_<T>(1, 1) << T(1))),
invP((cv::Mat_<T>(1, 1) << T(1))),
p_deg(1),
invP_deg(1),
Iwidth(T(0)), Iheight(T(0))
{
}
cCamModelGeneral(cv::Vec<T, 5> cdeu0v0,
cv::Mat_<T> p_,
cv::Mat_<T> invP_) : c(cdeu0v0[0]),
d(cdeu0v0[1]),
e(cdeu0v0[2]),
u0(cdeu0v0[3]),
v0(cdeu0v0[4]),
p(p_),
invP(invP_)
{
// initialize degree of polynomials
p_deg = (p_.rows > 1) ? p_.rows : p_.cols;
invP_deg = (p_.rows > 1) ? invP_.rows : invP_.cols;
cde1 = (cv::Mat_<T>(2, 2) << c, d, e, T(1));
}
cCamModelGeneral(cv::Vec<T, 5> cdeu0v0,
cv::Mat_<T> p_,
cv::Mat_<T> invP_,
int Iw_, int Ih_) : c(cdeu0v0[0]),
d(cdeu0v0[1]),
e(cdeu0v0[2]),
u0(cdeu0v0[3]),
v0(cdeu0v0[4]),
p(p_),
invP(invP_),
Iwidth(Iw_),
Iheight(Ih_)
{
// initialize degree of polynomials
p_deg = (p_.rows > 1) ? p_.rows : p_.cols;
invP_deg = (p_.rows > 1) ? invP_.rows : invP_.cols;
cde1 = (cv::Mat_<T>(2, 2) << c, d, e, T(1));
}
~cCamModelGeneral() {}
// template <typename T>
inline void
WorldToImg(const T &x, const T &y, const T &z, // 3D scene point
T &u, T &v) // 2D image point
{
T norm = sqrt(x * x + y * y);
if (norm == T(0))
norm = 1e-14;
T theta = atan(-z / norm);
T rho = horner<T>((T *)invP.data, invP_deg, theta);
T uu = x / norm * rho;
T vv = y / norm * rho;
u = uu * c + vv * d + u0;
v = uu * e + vv + v0;
}
// template <typename T>
inline void
WorldToImg(const cv::Point3_<T> &X, // 3D scene point
cv::Point_<T> &m) // 2D image point
{
T norm = sqrt(X.x * X.x + X.y * X.y);
if (norm == T(0))
norm = 1e-14;
T theta = atan(-X.z / norm);
T rho = horner<T>((T *)invP.data, invP_deg, theta);
T uu = X.x / norm * rho;
T vv = X.y / norm * rho;
m.x = uu * c + vv * d + u0;
m.y = uu * e + vv + v0;
}
// fastest by about factor 2
// template <typename T>
inline void
WorldToImg(const cv::Vec<T, 3> &X, // 3D scene point
cv::Vec<T, 2> &m) // 2D image point
{
double norm = cv::sqrt(X(0) * X(0) + X(1) * X(1));
if (norm == 0.0)
norm = 1e-14;
double theta = atan(-X(2) / norm);
double rho = horner<T>((T *)invP.data, invP_deg, theta);
double uu = X(0) / norm * rho;
double vv = X(1) / norm * rho;
m(0) = uu * c + vv * d + u0;
m(1) = uu * e + vv + v0;
}
// template <typename T>
inline void
ImgToWorld(T &x, T &y, T &z, // 3D scene point
const T &u, const T &v) // 2D image point
{
T invAff = c - d * e;
T u_t = u - u0;
T v_t = v - v0;
// inverse affine matrix image to sensor plane conversion
x = (1 * u_t - d * v_t) / invAff;
y = (-e * u_t + c * v_t) / invAff;
T X2 = x * x;
T Y2 = y * y;
z = -horner<T>((T *)p.data, p_deg, sqrt(X2 + Y2));
// normalize vectors spherically
T norm = sqrt(X2 + Y2 + z * z);
x /= norm;
y /= norm;
z /= norm;
}
// template <typename T>
inline void
ImgToWorld(cv::Point3_<T> &X, // 3D scene point
const cv::Point_<T> &m) // 2D image point
{
T invAff = c - d * e;
T u_t = m.x - u0;
T v_t = m.y - v0;
// inverse affine matrix image to sensor plane conversion
X.x = (1 * u_t - d * v_t) / invAff;
X.y = (-e * u_t + c * v_t) / invAff;
T X2 = X.x * X.x;
T Y2 = X.y * X.y;
X.z = -horner<T>((T *)p.data, p_deg, sqrt(X2 + Y2));
// normalize vectors spherically
T norm = sqrt(X2 + Y2 + X.z * X.z);
X.x /= norm;
X.y /= norm;
X.z /= norm;
}
// template <typename T>
inline void ImgToWorld(cv::Vec<T, 3> &X, // 3D scene point
const cv::Vec<T, 2> &m) // 2D image point
{
T invAff = c - d * e;
T u_t = m(0) - u0;
T v_t = m(1) - v0;
// inverse affine matrix image to sensor plane conversion
X(0) = (1 * u_t - d * v_t) / invAff;
X(1) = (-e * u_t + c * v_t) / invAff;
T X2 = X(0) * X(0);
T Y2 = X(1) * X(1); //径向距离
X(2) = -horner<T>((T *)p.data, p_deg, sqrt(X2 + Y2)); //获取f(r)
// normalize vectors spherically
T norm = sqrt(X2 + Y2 + X(2) * X(2));
X(0) /= norm;
X(1) /= norm;
X(2) /= norm;
}
// get functions
T Get_c() { return c; }
T Get_d() { return d; }
T Get_e() { return e; }
T Get_u0() { return u0; }
T Get_v0() { return v0; }
int GetInvDeg() { return invP_deg; }
int GetPolDeg() { return p_deg; }
cv::Mat_<T> Get_invP() { return invP; }
cv::Mat_<T> Get_P() { return p; }
T GetWidth() { return Iwidth; }
T GetHeight() { return Iheight; }
cv::Mat GetMirrorMask(int pyrL) { return mirrorMasks[pyrL]; }
void SetMirrorMasks(std::vector<cv::Mat> mirrorMasks_) { mirrorMasks = mirrorMasks_; }
bool isPointInMirrorMask(const T &u, const T &v, int pyr)
{
int ur = cvRound(u);
int vr = cvRound(v);
// check image bounds
if (ur >= mirrorMasks[pyr].cols || ur <= 0 ||
vr >= mirrorMasks[pyr].rows || vr <= 0)
return false;
// check mirror
if (mirrorMasks[pyr].at<uchar>(vr, ur) > 0)
return true;
else
return false;
}
private:
// affin parameters
T c;
T d;
T e;
cv::Mat_<T> cde1;
// principal point
T u0;
T v0;
// polynomial
cv::Mat_<T> p;
int p_deg;
// inverse polynomial
cv::Mat_<T> invP;
int invP_deg;
// image width and height
int Iwidth;
int Iheight;
// mirror mask on pyramid levels
std::vector<cv::Mat> mirrorMasks;
};
#endif
// cam_model_general.cpp
#include <iostream>
#include <chrono>
#include "cam_model_general.h"
using namespace std;
using namespace cv;
double time2double(std::chrono::steady_clock::time_point start,
std::chrono::steady_clock::time_point end)
{
return static_cast<double>(
std::chrono::duration_cast<std::chrono::nanoseconds>(end - start).count() * (double)1e-9);
}
double dRand(double fMin, double fMax)
{
return fMin + (double)rand() / RAND_MAX * (fMax - fMin);
}
int main()
{
// number of iterations for speed test
long iterations = 1e8;
// take some real world cam model
// this is the camera model of data set Fisheye1_
// ATTENTION!! I also switched the principal point coordinates
Vec<double, 5> interior_orientation(0.998883018922937, -0.0115128845387445, //cdeu0v0 均是标定得到
0.0107836324042904, 544.763473297893, 378.781825009886);
Mat_<double> p = (Mat_<double>(5, 1) << -338.405137634369, // poly系数,标定得到
0.0,
0.00120189826837736,
-1.27438189154991e-06,
2.85466623521256e-09);
// attention: this is the reverse order of findinvpoly
// as matlab evaluates the polynomials differently
Mat_<double> pInv = (Mat_<double>(11, 1) << 510.979186217526, // invPoly系数,标定得到
291.393724562448,
-13.8758863124724,
42.4238251854176,
23.054291112414,
-7.18539785128328,
14.1452111052043,
18.5034196957122,
-2.39675686593404,
-7.18896323060144,
-1.85081569557094);
// here comes the camera model
cCamModelGeneral<double> camModel(interior_orientation, p, pInv);
// test the correctness of the implementation, at least internally
double x0 = dRand(0, 5);//不应该是随机数产生的3D点么?为什么每次运行都一样呢?
double y0 = dRand(0, 5);
double z0 = dRand(0, 5);
Vec3d vec3d(x0, y0, z0);
Vec3d vec3d_normalized = (1 / norm(vec3d)) * vec3d;
Vec2d projection;
Vec3d unprojected;
camModel.WorldToImg(vec3d, projection);//3D点投影到2D点
cout << "projected point: " << projection << endl;
camModel.ImgToWorld(unprojected, projection);//把2D点投影到3D点,但这个3D点是归一化的三维点
cout << "unprojected:" << unprojected << endl;
cerr << "difference after unproject: " << norm(vec3d_normalized - unprojected) << endl;
std::chrono::steady_clock::time_point begin = std::chrono::steady_clock::now();
// timings
for (int i = 0; i < iterations; ++i)
{
camModel.WorldToImg(vec3d, projection);
camModel.ImgToWorld(unprojected, projection);
}
std::chrono::steady_clock::time_point end = std::chrono::steady_clock::now();
cout << "total time for " << iterations << " iterations of world2cam and cam2world: " << time2double(begin, end) << " s" << endl;
cout << "time for one iteration: " << time2double(begin, end) / iterations * 1e9 << " nano seconds" << endl;
return 0;
}

中国智能体开发者社区,聚焦智能体与大模型开发,提供前沿资讯、实用工具链、开源项目及行业案例。通过技术沙龙、开发者大赛等活动,促进经验交流与协作,助力开发者快速构建创新智能应用。
更多推荐
 25
25 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)