持续更新 | 第三弹:用颜色说话,机械臂如何“看懂”方块与曲线并自动执行?
一个简单的色块识别及其三维坐标提取的程序,使用OpenCV库,通过深度相机的深度信息与色彩信息进行识别,识别出的色块的三维坐标可以用于简单的机械臂抓取任务。
·
摘要
一个简单的色块识别及其三维坐标提取的程序,使用OpenCV库,通过深度相机的深度信息与色彩信息进行识别,识别出的色块的三维坐标可以用于简单的机械臂抓取任务。标签
颜色识别、3D曲线提取、曲线拟合、曲线插补、松灵轻量六轴机械臂PIPER代码仓库
功能演示
松灵PIPER机械臂曲线与方块识别
1.使用前准备
1.1.硬件准备
- 奥比中光Petrel(带对齐的深度图像与RGB图像:640*400@30fps)
- (可选):intel realsense D435(带对齐的深度图像与RGB图像:640*480@30fps)
- AgileX Robotics PiPER机械臂
1.2.软件环境配置
- 编译安装PCL点云库,linux编译示例参考官方文档:https://pcl.readthedocs.io/projects/tutorials/en/latest/compiling_pcl_posix.html需要指定编译on_nurbs选项
- PIPER机械臂驱动部署请参考:https://github.com/agilexrobotics/piper_sdk/blob/1_0_0_beta/README(ZH).MD
- PIPER机械臂ROS控制节点部署参考:https://github.com/agilexrobotics/piper_ros/blob/noetic/README.MD
2.功能操作步骤
2.1.启动色块检测节点
1.启动深度相机ROS驱动节点,以奥比中光Petrel为例
roslaunch astra_camera dabai_dc1.launch
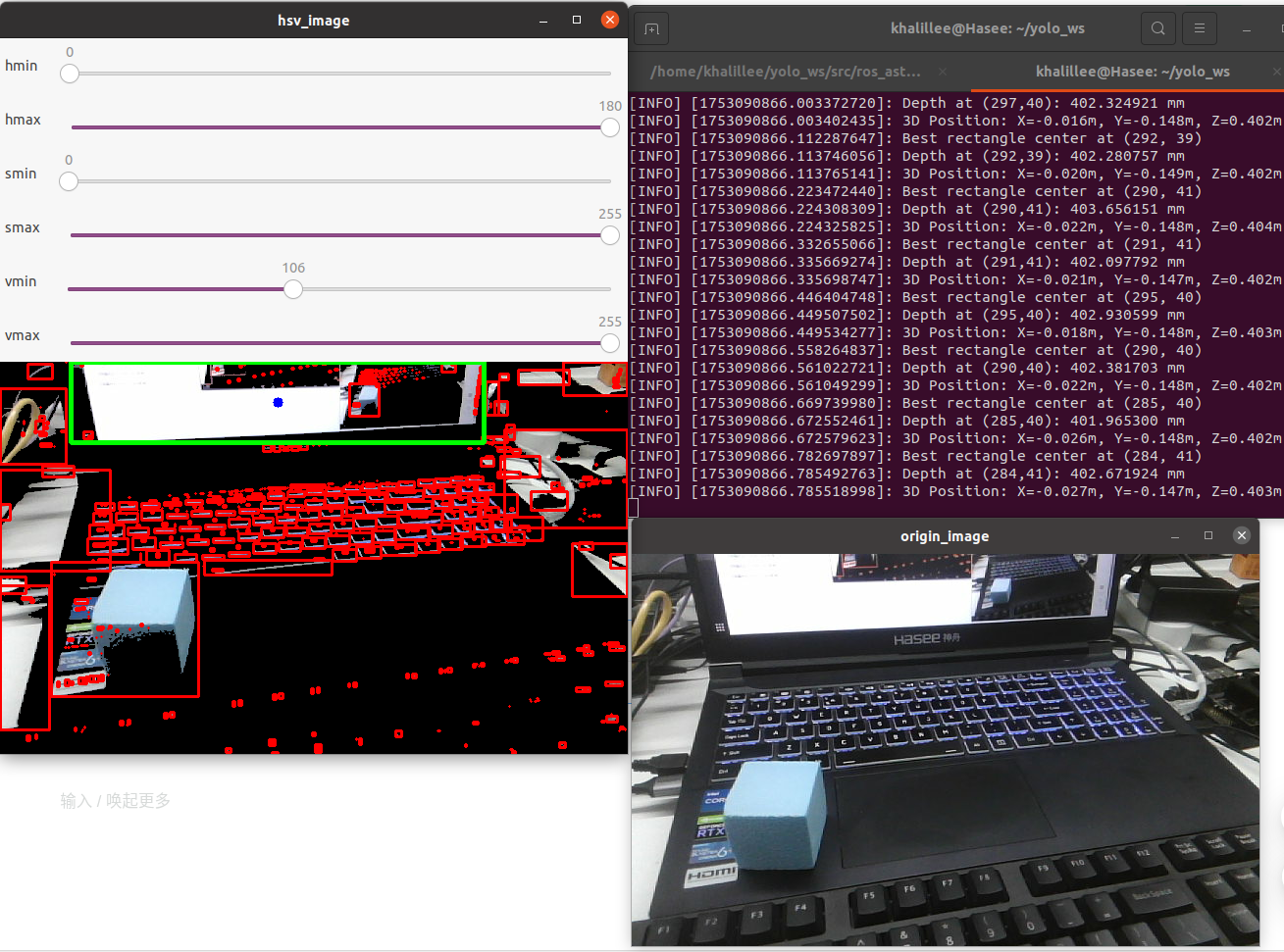
2.启动色块检测节点,弹出2个图像窗口分别是hsv_image和origin_image,其中拖动hsv_image中的滑块条可以改变HSV的参数来搜索特定的颜色;在origin_image中用光标点击需要搜索的颜色所在的位置,即可实现自动提取该位置的颜色并搜索
rosrun cube_det cube_det
- 接着演示自动搜索颜色功能:在
origin_image中用光标点击需要搜索的颜色所在的位置,即可实现自动提取该位置的颜色并搜索
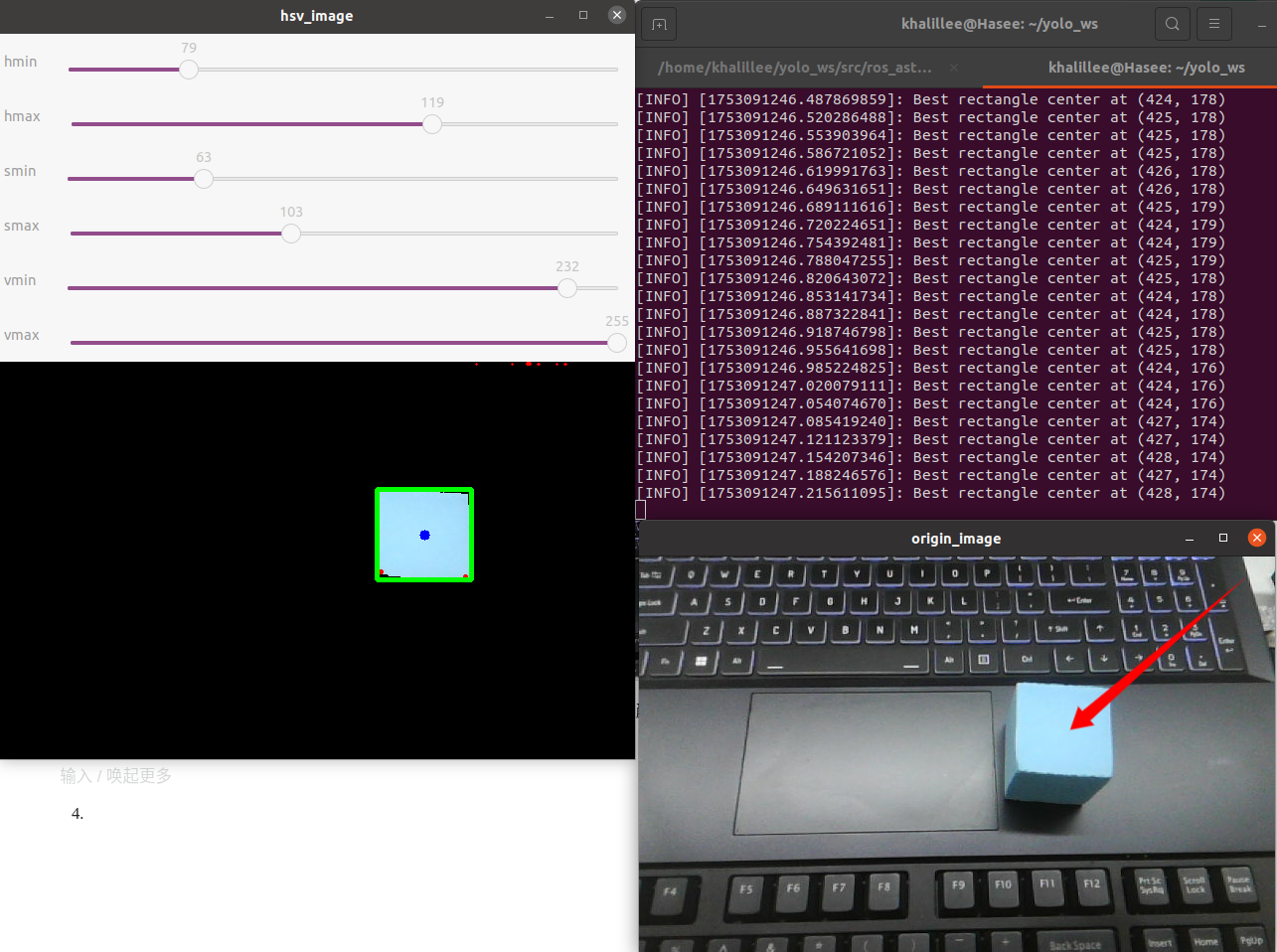
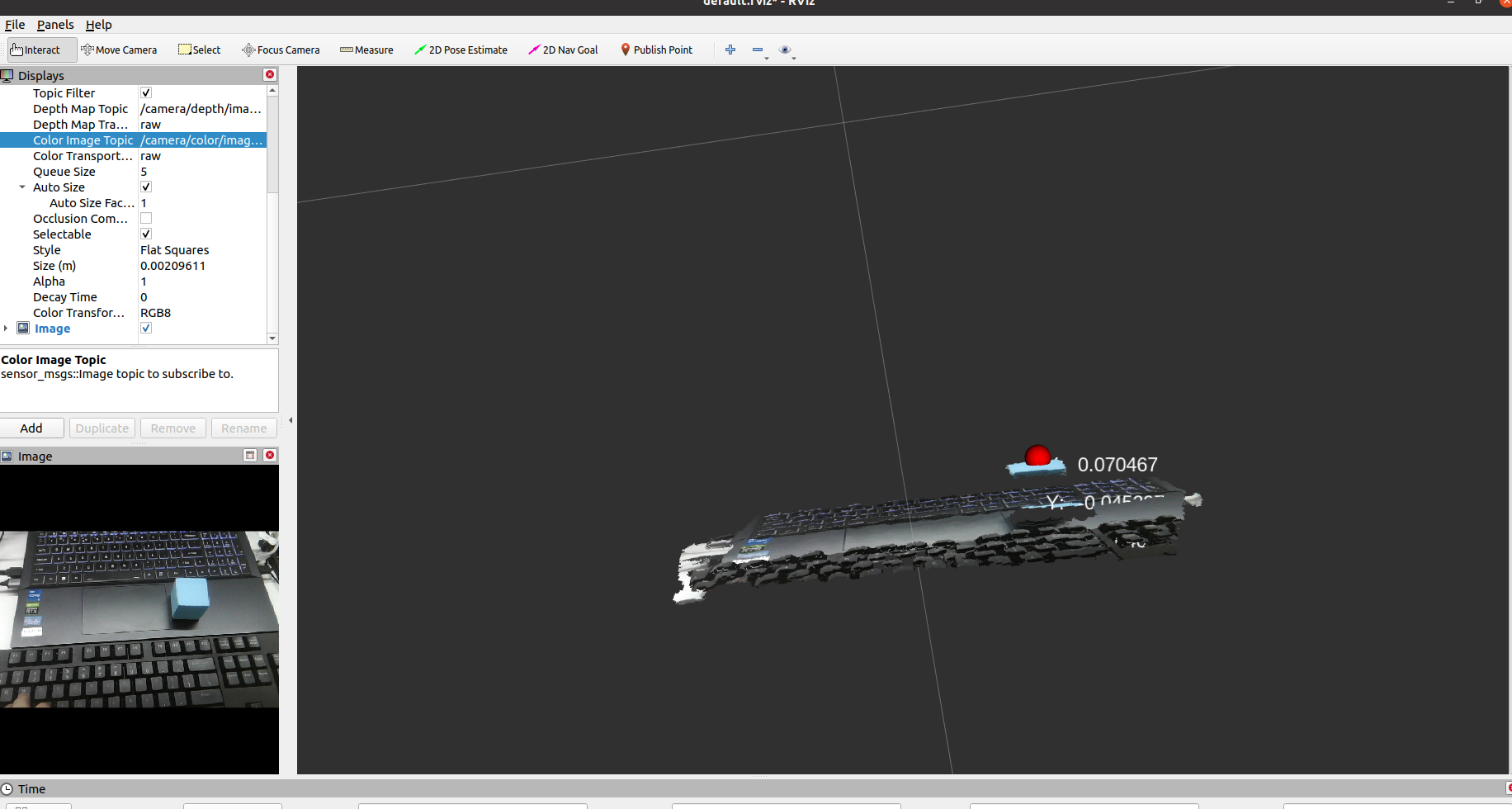
- 同时也会在rviz可视化蓝色中心点的三维坐标信息
2.2.启动曲线检测节点
- 启动深度相机ROS驱动节点,以奥比中光Petrel为例
roslaunch astra_camera dabai_dc1.launch
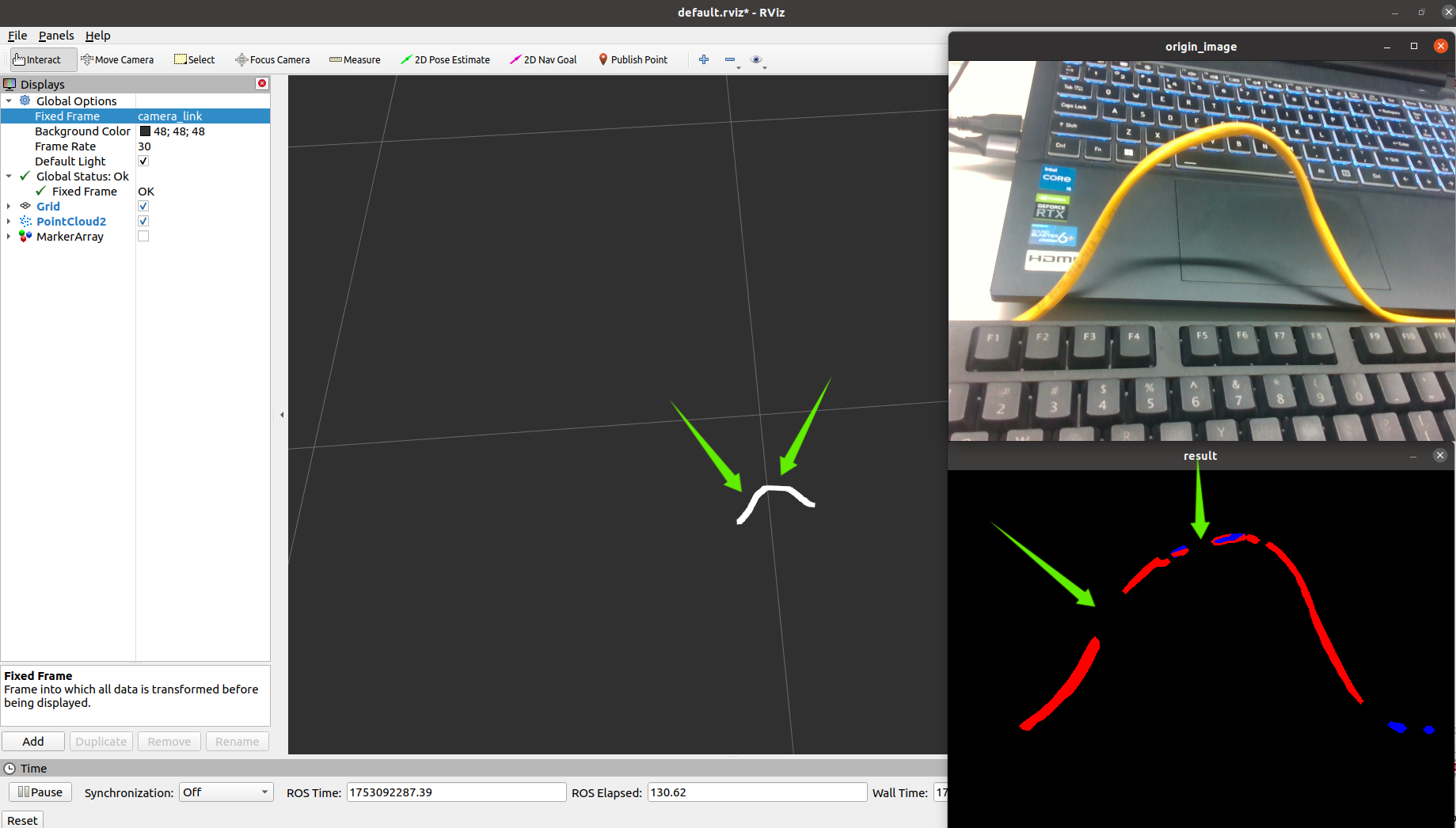
- 启动曲线检测节点,可以看出由于反光导致曲线颜色不统一,导致色彩识别部分在某些线段上出现空缺,导致出现线段不连续的现象,由于曲线检测节点内置了一个实验性质的曲线拟合器与插补器,可以使输出的曲线对应的点云连续且平滑,可以用作机械臂末端控制的数据
rosrun cube_det line_det
- 如上文2.1第三步操作,在
origin_image中用光标点击需要搜索的曲线所在的位置,即可实现自动提取该位置的曲线并搜索 - 开启rviz即可看到将曲线转换为完整的点云
- 启动机械臂ROS控制节点,将连接到机械臂的can模块插入PC,查找机械臂CAN总线
# 寻找机械臂的CAN端口
./find_all_can_port.sh
# 连接到机械臂的CAN端口
./can_activate.sh
- 启动机械臂运动节点
roslaunch piper start_single_piper.launch
- 启动运动学逆解,运动学逆解库pinocchio,(pinocchio环境配置参考
https://github.com/agilexrobotics/piper_ros/blob/noetic/src/piper/scripts/piper_pinocchio/README.MD)
python piper_pinocchio.py
- 给定一个机械臂Home点
rostopic pub /pos_cmd piper_msgs/PosCmd "{
x: -0.344,
y: 0.0,
z: 0.110,
roll: 0.0,
pitch: 0.0,
yaw: 0.0,
gripper: 0.0,
mode1: 1,
mode2: 0
}"
- 然后添加rviz的插件用来可视化生成的末端控制路径
/line_path
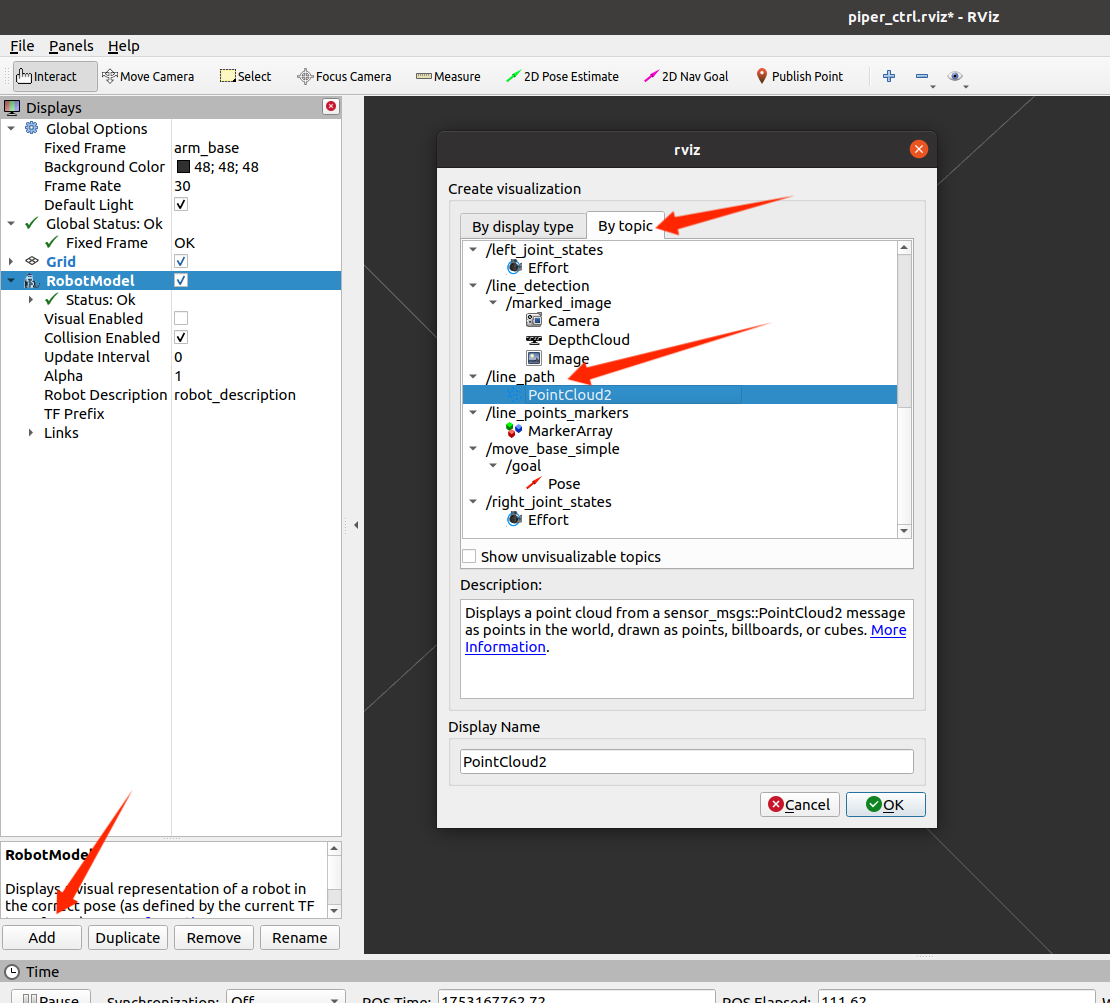
- 可以观察到生成的末端控制路径
/line_path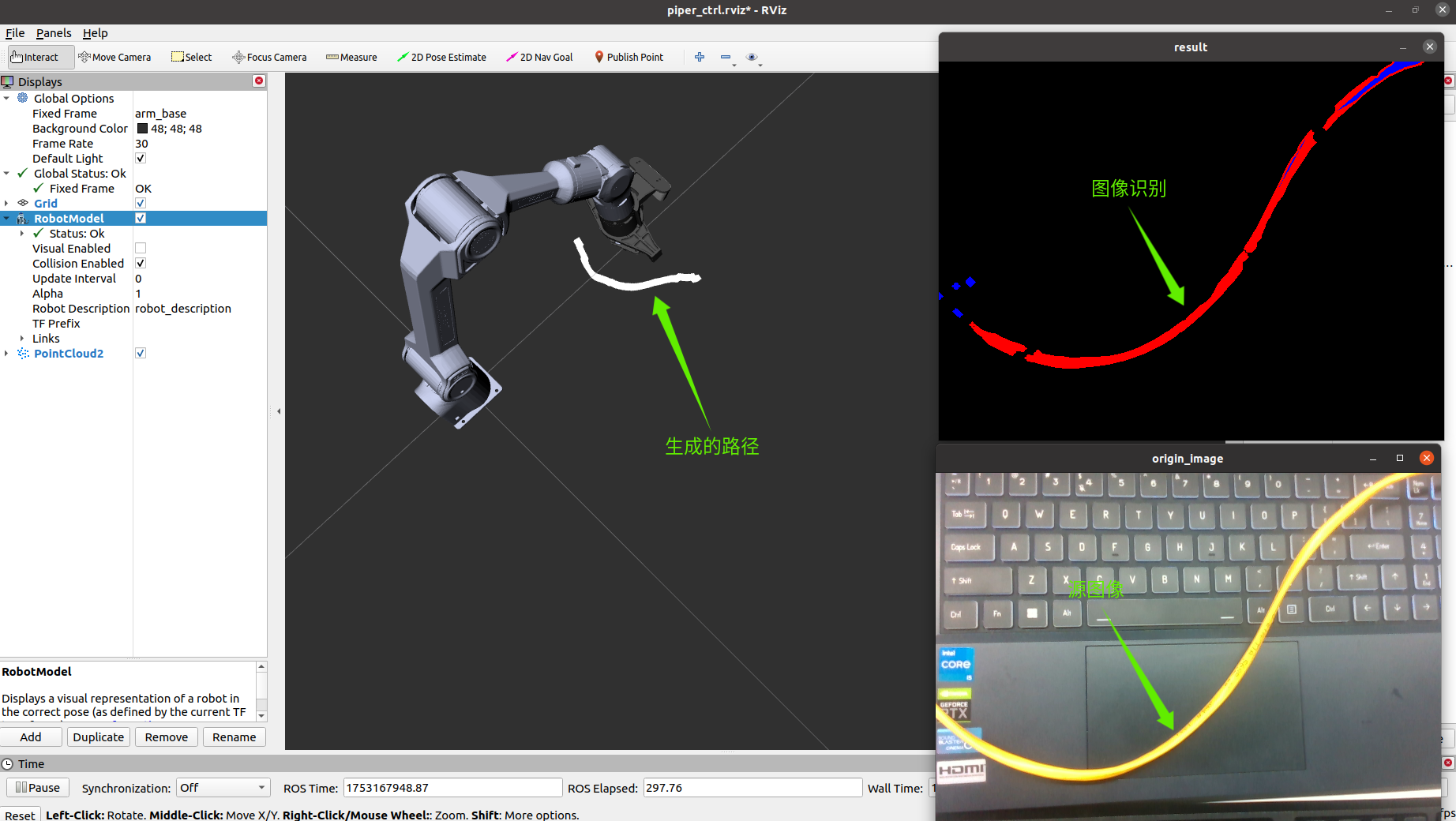
- 启动机械臂运动路径加载与末端控制程序
rosrun cube_det path_confer.py
- path_confer.py一共有三个操作:分别是
'r':记录当前的这一帧的点云,并将点云从相机坐标系camera_color_frame_optical转换到arm_base坐标系并生成为末端控制路径留作后面两个功能备用;'s':将记录的路径按序列单点发送,按一下's'发送一个坐标点到机械臂;'p':循环发布整个路径到机械臂。
- 确定好希望跟踪的路径,按键盘的
'r'键后可以看到rviz里生成一条基于坐标系arm_base的路径/transformed_cloud
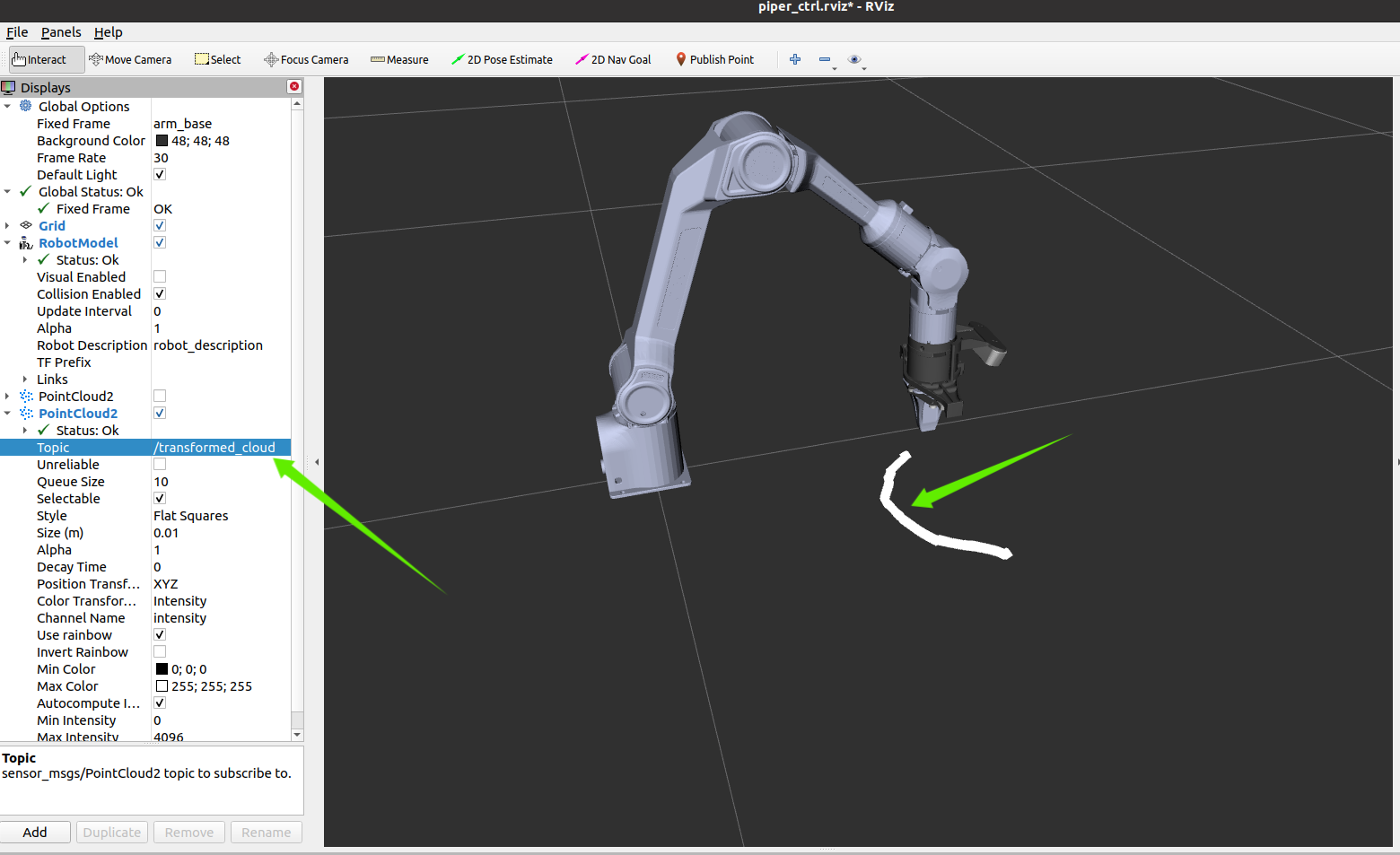
- 按下键盘上的
's'键或者'p'键即可开始控制机械臂沿着生成的轨迹/transformed_cloud开始跟踪。

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 31
31 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)