基于AutoDL远端服务器在pycharm复现:具身智能论文pai0
是远端服务器,本地只存储项目源码,其他一律不跑,一律不存,只通过SSH协议远程去调用服务器就可以。tips:配置过程中会有一个映射文件的选项,你可以自由的选择本地哪个路径映射到远端服务器哪个路径。首先确保你的服务器不在conda环境下,只要你不多于操作,服务器调起来后一般是不会进conda的。如果控制台打印了print语句,说明的UV搞定了,有警告没关系,只要能跑起来就行。· pai0的复现有两个
基于AutoDL远端服务器在pycharm复现:身智能论文pai0
一、通过git把项目源码下载到本地
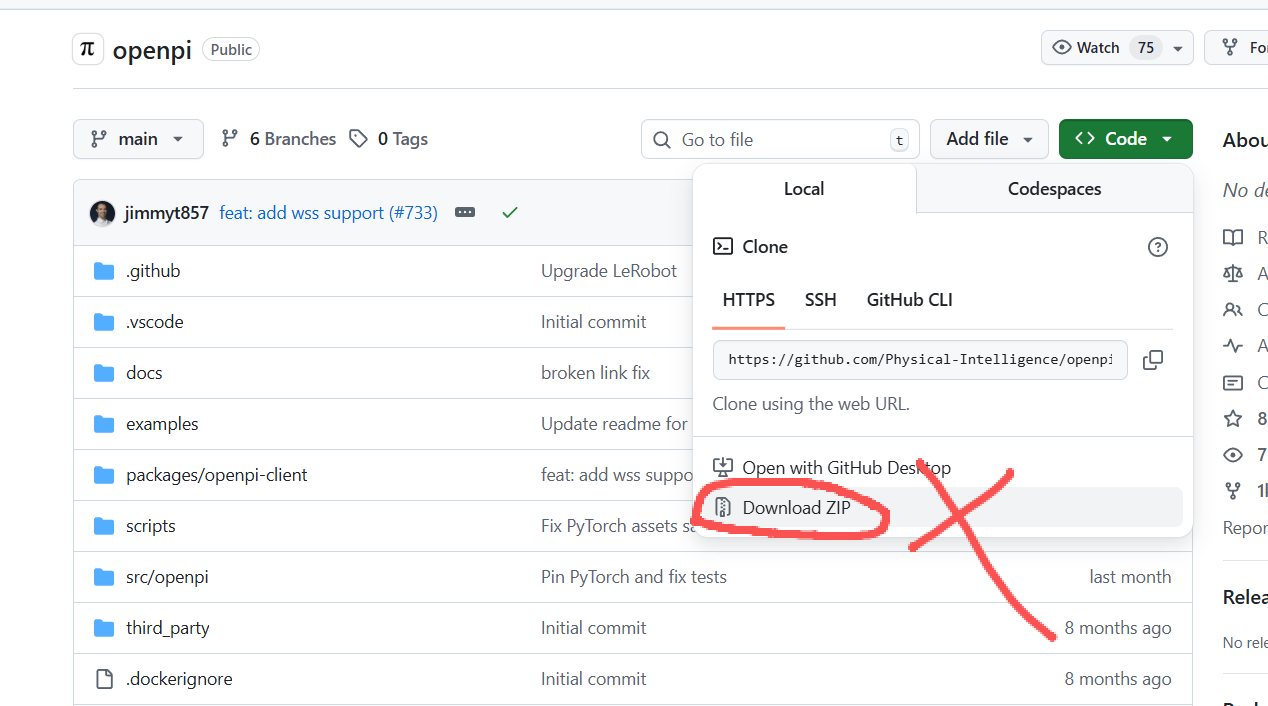
我们一定要使用git命令去下,不要用git网站的download ZIP去下载。因为这个下载下来的项目会缺少部分文件,最后你还是要用git命令下载。打开pycharm本地终端,输入命令:
git clone --recurse-submodules https://github.com/Physical-Intelligence/openpi.git
本地把下载好的这个项目新建一个工程,这样你的pycharm本地就有代码了: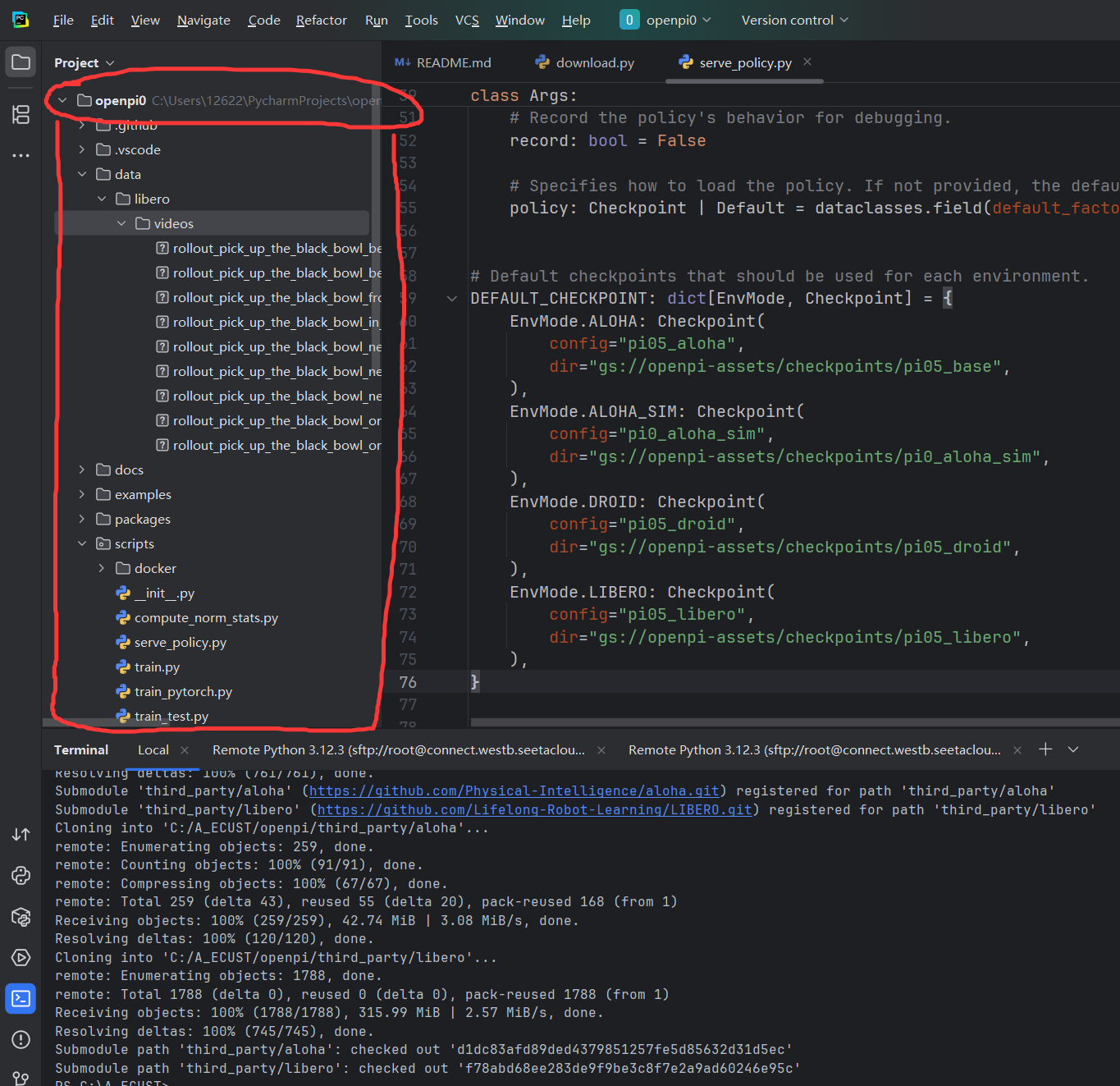
二、把远端显卡通过SSH连接到你的本地pycharm
- 首先去AutoDL官网组一个显卡,要求:Ubuntu 22.04镜像、4090及以上即可。
环境版本:
镜像:
PyTorch 2.8.0
Python 3.12(ubuntu22.04)
CUDA 12.8
GPU:
RTX 4090(24GB) * 1

3. 在pycharm中如何配置好显卡,官网有非常详细的操作手册,按照一步一步做就能搭建好,点击跳转。
配置好后效果如下图红色圈圈所示:
tips:配置过程中会有一个映射文件的选项,你可以自由的选择本地哪个路径映射到远端服务器哪个路径。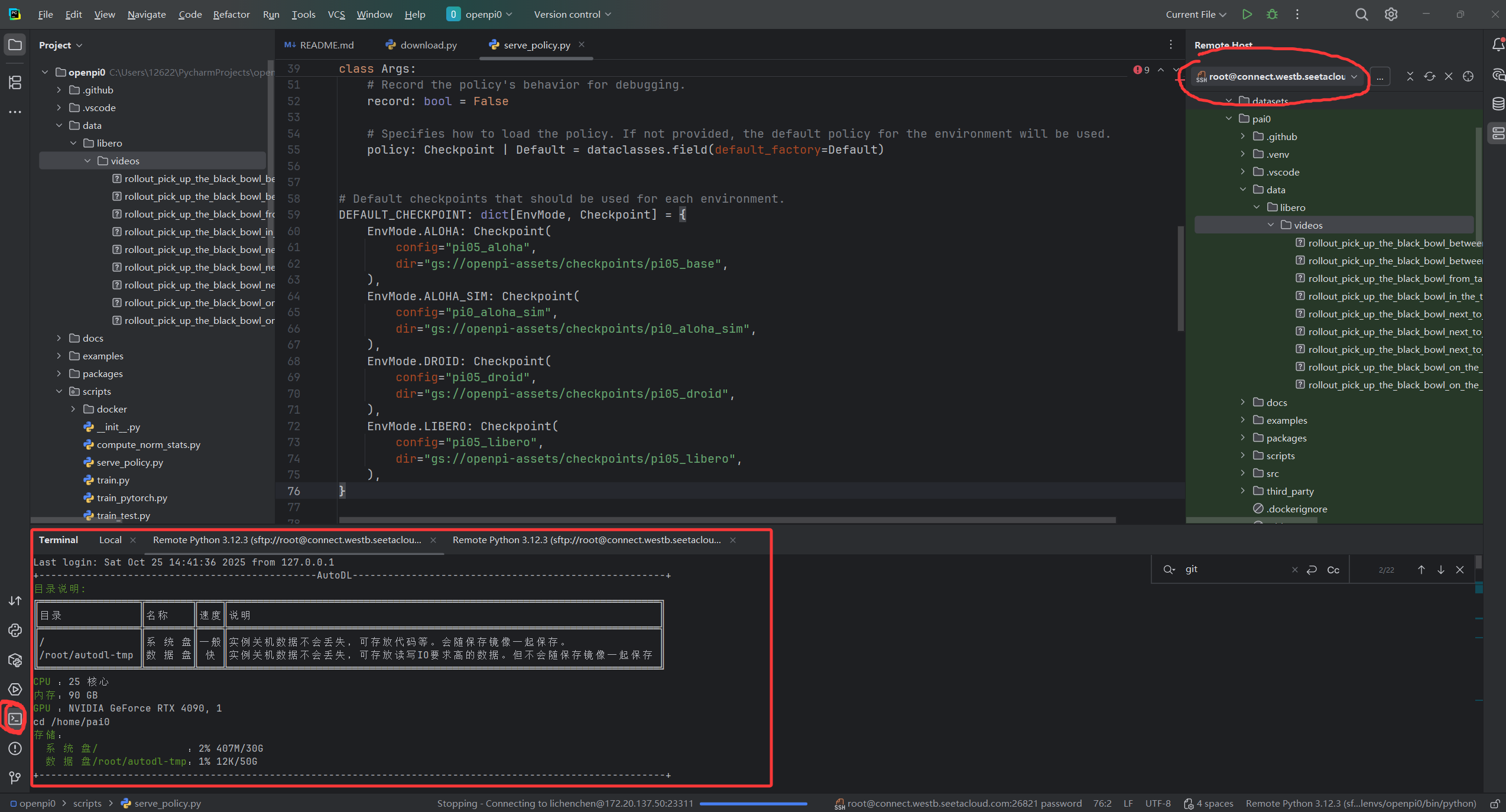
三、下载模型
首先捋清楚一些概念:
· pai0的复现有两个模块,一个是服务端,一个是客户端,分别在两个终端运行;
· 租的显卡是远端服务器,本地只存储项目源码,其他一律不跑,一律不存,只通过SSH协议远程去调用服务器就可以。
现在,我们有显卡,有代码,接下来去服务器上面部署环境。
服务器部署UV
首先确保你的服务器不在conda环境下,只要你不多于操作,服务器调起来后一般是不会进conda的。
分别输入以下命令安装UV:
export UV_DEFAULT_INDEX="https://mirrors.aliyun.com/pypi/simple"
wget -qO- https://astral.sh/uv/install.sh | sh
echo 'eval "$(uv generate-shell-completion bash)"' >> ~/.bashrc
pip install uv
在安装完后进入到 项目的根目录下执行下面的命令:
cd 你的项目根目录(默认是openpi,我自己改名为pai0了)
GIT_LFS_SKIP_SMUDGE=1 uv sync
GIT_LFS_SKIP_SMUDGE=1 uv pip install -e .
都不报错误的话,接下来试试UV装好了没。
echo 'print("UV work done")' > test.py
uv run test.py
如果控制台打印了print语句,说明的UV搞定了,有警告没关系,只要能跑起来就行。

下载模型
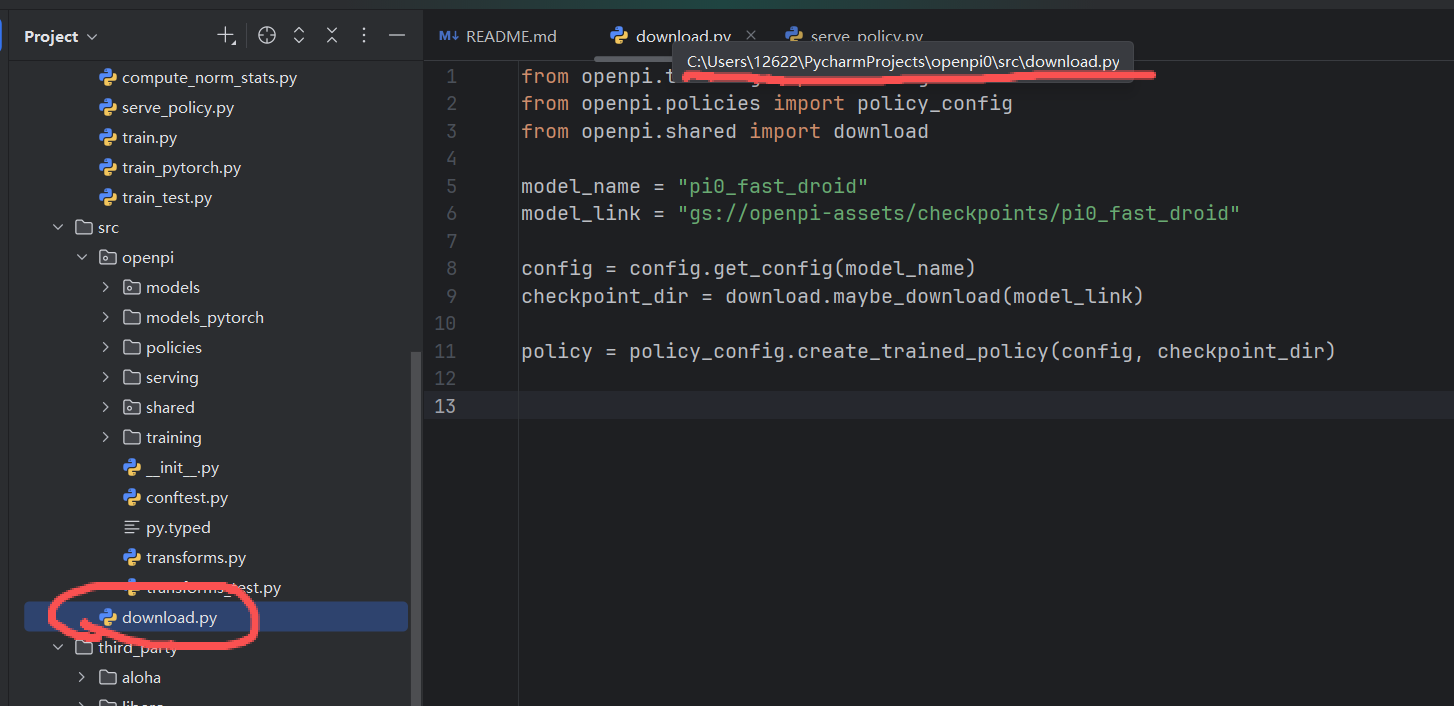
我们通过脚本下载模型,首先在你本地的项目中new一个python文件download.py,这个脚本要放在src 目录下,里面写如下代码:
from openpi.training import config
from openpi.policies import policy_config
from openpi.shared import download
model_name = "pi0_fast_droid"
model_link = "gs://openpi-assets/checkpoints/pi0_fast_droid"
config = config.get_config(model_name)
checkpoint_dir = download.maybe_download(model_link)
policy = policy_config.create_trained_policy(config, checkpoint_dir)
脚本中的 model_name 和 model_link 变量来指定想要的模型。这两个变量其实就是 ReadMe 提供的链接,
例如 gs://openpi-assets/checkpoints/pi0_fast_droid,那么模型名就是后缀 pi0_fast_droid 。官方Git网站上readme文件的Model Checkpoints章节介绍了基准模型和微调模型,你随便挑一个自己爱的就行了。
下一步,在服务器终端设置环境变量
export HF_ENDPOINT="https://hf-mirror.com"
模型会自动下载到 ~/.cache/openpi/openpi-assets/checkpoints 路径下,如果你想要修改默认下载路径可以在当前bash中执行以下命令:
export OPENPI_DATA_HOME="your model save path"
我设置的是AutoDL一个约定好的本地目录:/root/autodl-tmp 。
tips:如果你需要更换模型,可以把该目录下面的模型删除,重复上述操作重新下载。
在服务器命令行输入指令启动下载:
uv run src/download.py
这里放一张大佬的图:想看大佬教程的移步这里。我只完成了最基础的复现工作,大佬做了很多更深入的研究。

运行服务端
上面都对的话现在应该在这里了:
现在把服务端拉起来,启动推理服务(会自动连接到HuggingFace)
export HF_ENDPOINT=https://hf-mirror.com
uv run scripts/serve_policy.py --env LIBERO
如果正常的话现在服务端就起来了,并持续监听8000端口: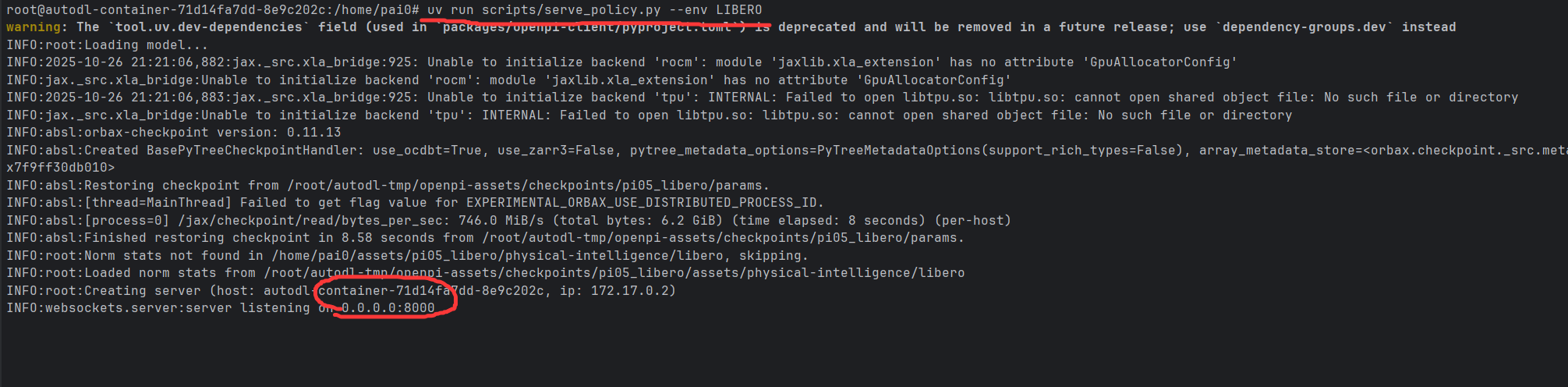
这里我建议大家自己去读一下serve_policy.py代码。
四、部署客户端,并下载小视频 ;)
现在我们暂时不用管服务端的终端窗口,new一个新的终端窗口,进入项目所在目录,按顺序输入下面的代码配置并激活uv环境:
uv venv --python 3.8 examples/libero/.venv
source examples/libero/.venv/bin/activate
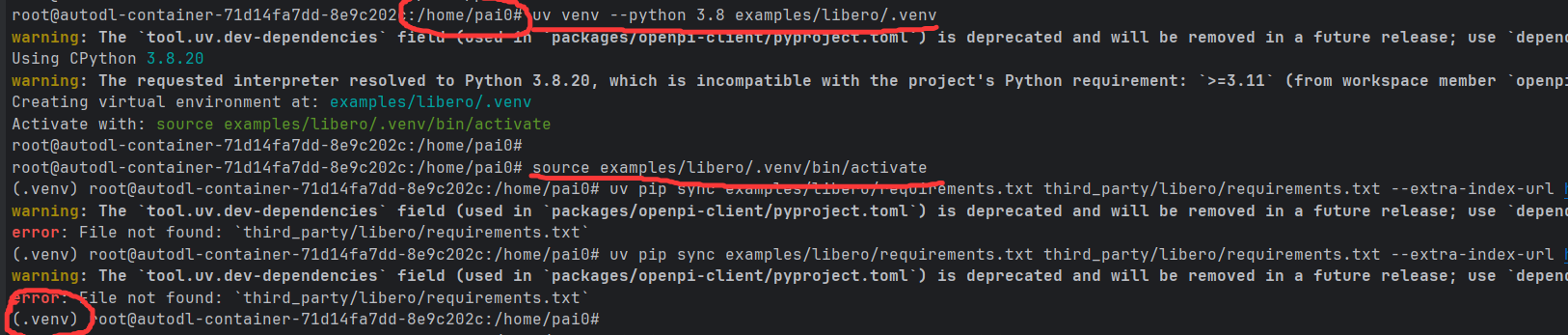
# 此命令下载包较多,可能时间较久
uv pip sync examples/libero/requirements.txt third_party/libero/requirements.txt --extra-index-url https://download.pytorch.org/whl/cu113 --index-strategy=unsafe-best-match
# 下载客户端
uv pip install -e packages/openpi-client
# 下载第三方库
uv pip install -e third_party/libero
# 配置全局环境变量
export PYTHONPATH=SPYTHONPATH:$PWD/third_party/libero
# 如果使用AutoDL这种无图形化界面的云服务,那么需要额外配置ubuntu的图形化必要依赖
apt-get update && apt-get install -y libgl1-mesa-glx libosmesa6-dev libglew-dev patchelf libegl1
# 最后启动客户端
python examples/libero/main.py
按下方红色划线输入指令: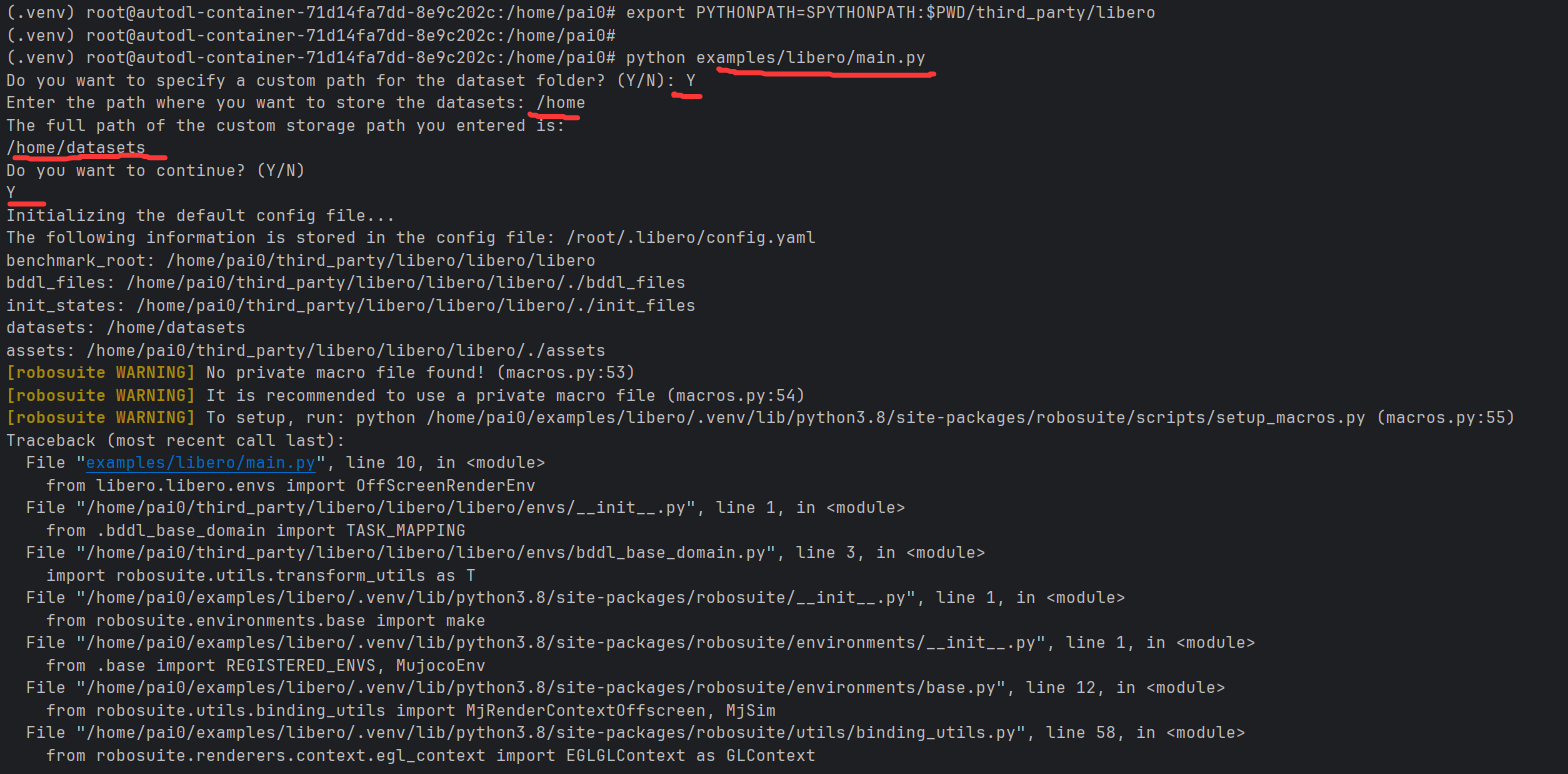
一切正常的话客户端已经在跑了: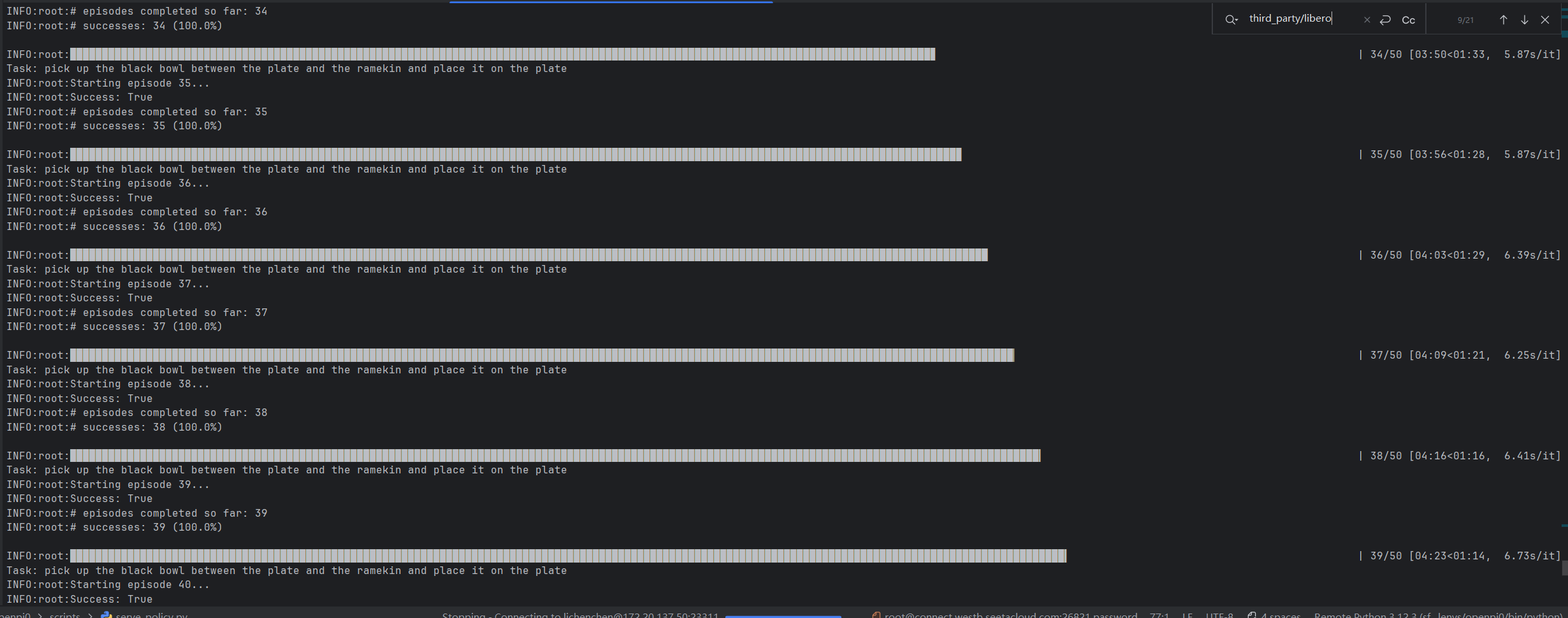
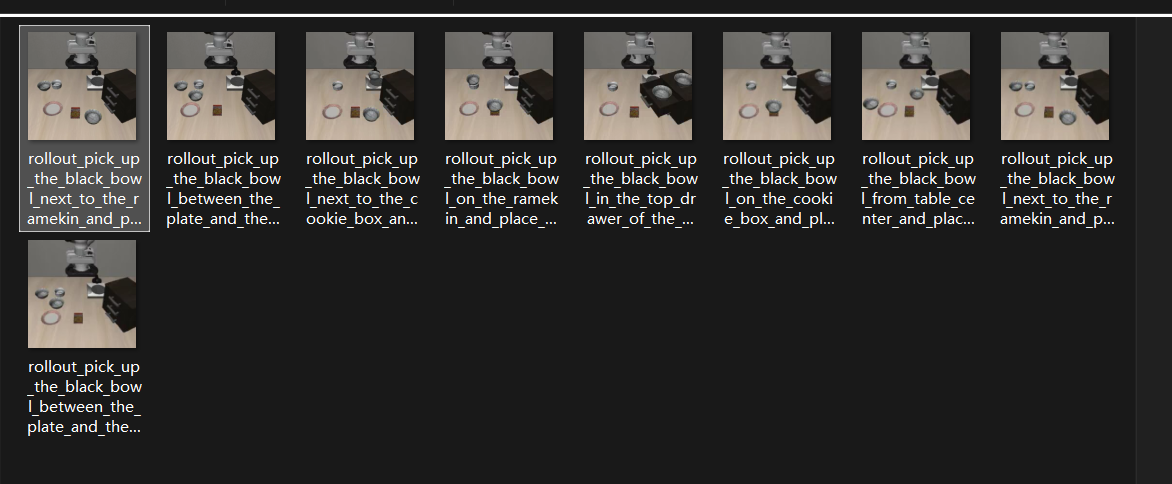
最后产生的视频在如下图的目录:
至此复现做完了,但是这只是刚刚开始。继续学习吧!0.0

中国智能体开发者社区,聚焦智能体与大模型开发,提供前沿资讯、实用工具链、开源项目及行业案例。通过技术沙龙、开发者大赛等活动,促进经验交流与协作,助力开发者快速构建创新智能应用。
更多推荐
 33
33 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)