数字信号处理篇---时域、频域、s域(连续)、z域(离散)中系统稳定性
本文从时域、频域、s域和z域四个维度系统阐述了系统稳定性的判定方法。在时域中,稳定性取决于脉冲响应是否绝对可积/可和;频域要求频率响应必须有限存在;s域要求所有极点位于左半平面(实部为负);z域则要求极点位于单位圆内(模小于1)。虽然各域判定标准不同,但本质相通:稳定系统必须具有能量耗散特性,其自然响应最终衰减。其中极点位置分析法最为本质和实用,s域左稳右不稳和z域内稳外不稳的判定准则具有统一性,
核心思想:什么是稳定?
在信号处理中,一个稳定系统的定义非常直观:
对于一个有界的输入,系统必须产生一个有界的输出。
简称 BIBO稳定。
通俗理解:你给系统一个幅度有限的信号(别把它“吓坏”),它回应你的信号也应该是幅度有限的(不会“失控”或“爆炸”)。
-
稳定例子:一个电阻电容电路、一个质量好的音频滤波器。
-
不稳定例子:一个接上了麦克风的音箱,当麦克风离音箱太近时,一点微小的声音被不断放大、反馈,最终产生刺耳的啸叫。这就是失控和爆炸。
第一章:时域视角 —— 观察系统的“自然反应”
是什么?
在时域中,我们通过观察系统的 “自然反应” 或 “脉冲响应” 来判断稳定性。
-
脉冲响应
h(t)或h[n]:你轻轻“拍”一下系统(给它一个脉冲输入),然后站到一边,记录下它自己是如何“振动”和“平息”下来的。这个记录就是脉冲响应。
为什么?
脉冲响应包含了系统的所有秘密。如果系统在被你“拍”了一下之后,它的自然反应能够逐渐平息下来,那么它就是稳定的。如果它的反应无限期地持续下去甚至越来越大,那它就是不稳定的。
怎样做?(判断准则)
系统的脉冲响应必须是绝对可和的(离散)或绝对可积的(连续)。
-
离散系统:∑ |h[n]| < ∞ (从n=-∞到+∞的求和是有限的)
-
连续系统:∫ |h(τ)| dτ < ∞ (从τ=-∞到+∞的积分是有限的)
通俗解释:把脉冲响应每一个时刻的幅度值(取绝对值)加起来,如果得到一个有限的总和,系统稳定;如果这个总和是无穷大,系统不稳定。
图解说明:
不稳定
^
振幅 | .-----. .-----.
| / \ / \
| / \/ \ / -- 持续振荡甚至增长
| / /
|/ /
----+------------------------------> 时间
|
稳定 (衰减)
^
振幅 | .-----. 系统被“拍”一下后,
| / \ 能量逐渐消耗殆尽,
| / \_ 自然反应趋于零。
| / \
|/ \.......
----+------------------------------> 时间
|
本质:在时域,稳定性取决于系统内部能量是否随时间耗散。稳定的系统是耗散型的,不稳定的系统是能量增长型的。
第二章:频域视角 —— 观察系统的“强迫反应”
是什么?
在频域,我们通过系统的频率响应 H(ω) 来判断稳定性。频率响应描述系统对不同频率正弦输入的稳态响应。
为什么?
一个不稳定的系统,其输出在理论上会趋于无穷大,因此它不存在稳态。对于一个不存在稳态的系统,去谈论它的“稳态响应”是没有意义的。
怎样做?(判断准则)
频率响应 H(ω) 必须存在且是有限的。
也就是说,H(ω) 的傅里叶变换必须收敛。
-
深入原理:频率响应
H(ω)其实就是脉冲响应h(t)或h[n]的傅里叶变换。而我们从时域知道,h(t)必须绝对可积,其傅里叶变换才会存在。因此,如果频率响应存在,通常意味着系统是稳定的。 -
例外情况:对于临界稳定系统(如理想积分器、纯谐振器),其脉冲响应不衰减,频率响应在某些点上是无穷大(出现狄拉克δ函数)。这类系统通常也被视为不稳定或临界稳定,因为它们对某些特定频率的输入会产生无限大的输出。
本质:在频域,稳定性取决于系统是否对所有频率都能给出一个有限的、有定义的响应。
第三章:s域视角(连续系统)—— 观察系统的“特征根”
s域是分析连续时间系统的利器。它通过拉普拉斯变换,将微分方程变成了代数方程。
是什么?
在s域,系统的特性由系统函数 H(s) 描述,它是一个关于复变量 s 的有理分式。H(s) 的分母多项式称为特征多项式,令这个多项式等于零,解出的根称为系统的极点。
为什么?(最核心的原理)
系统的极点,决定了系统自然反应(脉冲响应)的模式!
-
s = σ + jω,其中实部σ代表增长/衰减因子,虚部ω代表振荡频率。 -
一个极点
s_p对应的自然模式是e^(s_p * t)。-
如果
s_p的实部σ > 0,e^(σt)会指数增长 -> 不稳定! -
如果
s_p的实部σ = 0,e^(σt)是等幅振荡 -> 临界稳定。 -
如果
s_p的实部σ < 0,e^(σt)会指数衰减 -> 稳定!
-
怎样做?(判断准则)
一个连续系统稳定的充要条件是:其系统函数 H(s) 的所有极点都必须位于s平面的左半平面(LHP)。即,所有极点的实部都必须小于零。
让我们用一张图来直观理解:
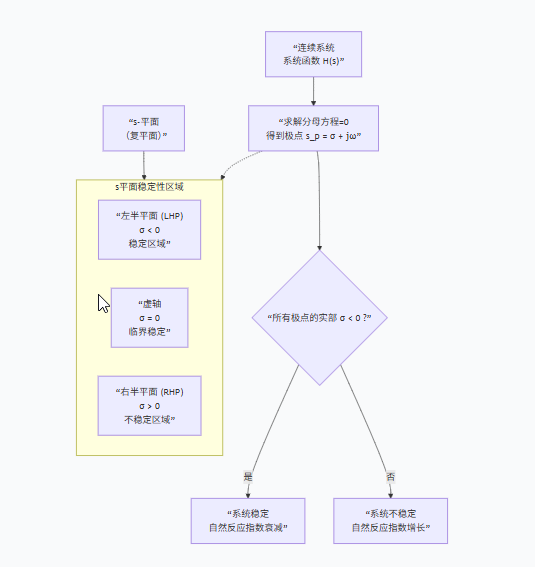
图解说明:
-
s平面的纵轴(虚轴)代表频率,横轴(实轴)代表增长/衰减因子。
-
稳定区域在左侧,因为这里实部
σ < 0,对应衰减。 -
不稳定区域在右侧,因为这里实部
σ > 0,对应增长。 -
虚轴上是稳定与不稳定的边界,称为临界稳定。
本质:在s域,稳定性取决于系统特征根(极点) 在s平面上的地理位置。“左稳右不稳”。
第四章:z域视角(离散系统)—— 观察系统的“特征根”
z域是分析离散时间系统的利器。它通过z变换,将差分方程变成了代数方程。
是什么?
在z域,系统的特性由系统函数 H(z) 描述。同样,H(z) 的分母多项式的根称为极点。
为什么?(最核心的原理)
z域的极点,决定了离散系统自然反应(脉冲响应)的模式!
-
一个极点
z_p对应的自然模式是(z_p)^n。 -
复数的模
|z_p|代表增长/衰减的幅度。-
如果
|z_p| > 1,(|z_p|)^n会指数增长 -> 不稳定! -
如果
|z_p| = 1,(|z_p|)^n是等幅振荡 -> 临界稳定。 -
如果
|z_p| < 1,(|z_p|)^n会指数衰减 -> 稳定!
-
怎样做?(判断准则)
一个离散系统稳定的充要条件是:其系统函数 H(z) 的所有极点都必须位于z平面的单位圆内。即,所有极点的模都必须小于1。
让我们用另一张图来直观理解:
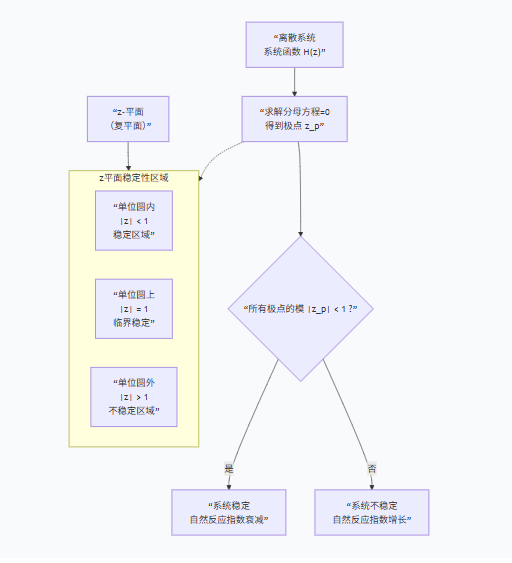
图解说明:
-
z平面的原点代表衰减的终点,单位圆
|z|=1是边界。 -
稳定区域在单位圆内部,因为这里模
|z| < 1,对应衰减。 -
不稳定区域在单位圆外部,因为这里模
|z| > 1,对应增长。 -
单位圆上是临界稳定。
本质:在z域,稳定性取决于系统特征根(极点) 在z平面上与单位圆的相对位置。“内稳外不稳”。
终极总结与统一
| 域 | 判断对象 | 稳定准则 | 核心思想 |
|---|---|---|---|
| 时域 | 脉冲响应 h(t)/h[n] |
绝对可积/可和 | 自然反应必须衰减 |
| 频域 | 频率响应 H(ω) |
必须存在且有限 | 必须存在稳态 |
| s域(连续) | 系统函数 H(s) 的极点 |
所有极点位于s左半平面 | 特征根实部为负 |
| z域(离散) | 系统函数 H(z) 的极点 |
所有极点位于单位圆内 | 特征根模小于1 |
为什么s域和z域的准则看起来不同?
因为它们的地图(复平面)不同!
-
s域的稳定边界是虚轴(
σ=0),稳定区域在左边。 -
z域的稳定边界是单位圆(
|z|=1),稳定区域在内部。 -
这其实是通过一种叫 “双线性变换” 的映射关系联系起来的。s域的左半平面正好映射到z域的单位圆内。
结论:在所有域中,最强大、最常用、最本质的稳定性判断方法,就是观察系统函数的极点位置。它给出了稳定性的充要条件,并且可以直接从系统函数中计算得到,无需进行复杂的积分或求解脉冲响应。

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 23
23 0
0- 0



 已为社区贡献56条内容
已为社区贡献56条内容

所有评论(0)