【珍藏必读】Qwen3-VL源码深度剖析:从零开始掌握视觉语言大模型实现
本文详细解析了Qwen3-VL视觉语言大模型的源码实现,从图像预处理、模型入口到视觉编码器,全面剖析了模型如何处理多模态输入。文章重点讲解了Qwen3VLProcessor如何将图像转为pixel_value,Qwen3VLModel如何融合图像和文本特征,以及自研视觉编码器Qwen3VLVisionModel的工作原理,为理解视觉语言模型提供了深入的代码视角。
前言
视觉语言模型 (VLM) 是自回归 AI 模型,可将文本和图像处理为输入。在这一篇文章中我们也会详细的从源码来看Qwen3-VL模型怎么实现的。
Qwen3-VL源码解剖
首先我们来看下qwen3-vl源码有哪些文件
从上图可知,configuration_qwen3表示配置信息;modeling_qwen3表示整个多模态大模型的实现;processing_qwen3_vl表示图片处理;video_processing_qwen3_vl表示视频处理。老规矩,咱们还是从主类开始一步步分析,看看其背后的原理。
解剖之前,我们来看看Qwen3VLProcessor类,它是将我们输入的图片转为pixel的一个类。这个类是在processing_qwen3_vl中,从模型配置文件(preprocessor_config.json)可知,使用的视觉处理是Qwen2VLImageProcessorFast,也就是说,Qwen3-VL将图片转为pixel_value使用的是Qwen2-VL的处理器,具体代码如下:
def _preprocess(
self,
images: list["torch.Tensor"],
do_resize: bool,
size: SizeDict,
interpolation: Optional["F.InterpolationMode"],
do_rescale: bool,
rescale_factor: float,
do_normalize: bool,
image_mean: Optional[Union[float, list[float]]],
image_std: Optional[Union[float, list[float]]],
patch_size: int,
temporal_patch_size: int,
merge_size: int,
disable_grouping: Optional[bool],
return_tensors: Optional[Union[str, TensorType]],
**kwargs,
):
# Group images by size for batched resizing
grouped_images, grouped_images_index = group_images_by_shape(images, disable_grouping=disable_grouping)
resized_images_grouped = {}
for shape, stacked_images in grouped_images.items():
height, width = stacked_images.shape[-2:]
if do_resize:
resized_height, resized_width = smart_resize(
height,
width,
factor=patch_size * merge_size,
min_pixels=size["shortest_edge"],
max_pixels=size["longest_edge"],
)
stacked_images = self.resize(
image=stacked_images,
size=SizeDict(height=resized_height, width=resized_width),
interpolation=interpolation,
)
resized_images_grouped[shape] = stacked_images
resized_images = reorder_images(resized_images_grouped, grouped_images_index)
# Group images by size for further processing
# Needed in case do_resize is False, or resize returns images with different sizes
grouped_images, grouped_images_index = group_images_by_shape(resized_images, disable_grouping=disable_grouping)
processed_images_grouped = {}
processed_grids = {}
for shape, stacked_images in grouped_images.items():
resized_height, resized_width = stacked_images.shape[-2:]
# Fused rescale and normalize
patches = self.rescale_and_normalize(
stacked_images, do_rescale, rescale_factor, do_normalize, image_mean, image_std
)
if patches.ndim == 4:
# add a temporal dimension if we have images
patches = patches.unsqueeze(1)
if patches.shape[1] % temporal_patch_size != 0:
repeats = patches[:, -1:].repeat(1, temporal_patch_size - 1, 1, 1, 1)
patches = torch.cat([patches, repeats], dim=1)
batch_size, grid_t, channel = patches.shape[:3]
grid_t = grid_t // temporal_patch_size
grid_h, grid_w = resized_height // patch_size, resized_width // patch_size
patches = patches.view(
batch_size,
grid_t,
temporal_patch_size,
channel,
grid_h // merge_size,
merge_size,
patch_size,
grid_w // merge_size,
merge_size,
patch_size,
)
# Reorder dimensions to group grid and patch information for subsequent flattening.
# (batch, grid_t, grid_h, grid_w, merge_h, merge_w, channel, temp_patch_size, patch_h, patch_w)
patches = patches.permute(0, 1, 4, 7, 5, 8, 3, 2, 6, 9)
flatten_patches = patches.reshape(
batch_size,
grid_t * grid_h * grid_w,
channel * temporal_patch_size * patch_size * patch_size,
)
processed_images_grouped[shape] = flatten_patches
processed_grids[shape] = [[grid_t, grid_h, grid_w]] * batch_size
processed_images = reorder_images(processed_images_grouped, grouped_images_index)
processed_grids = reorder_images(processed_grids, grouped_images_index)
pixel_values = torch.cat(processed_images, dim=0)
image_grid_thw = torch.tensor(processed_grids)
return BatchFeature(
data={"pixel_values": pixel_values, "image_grid_thw": image_grid_thw}, tensor_type=return_tensors
)
从最后的return可以看到是返回了pixel_values,这个数据就是给到Qwen3-VL模型的一个输入值。
因为主类没有提及这一块,所以先提前给大家看到这个过程,避免在后面看到pixel_values不知道怎么来的,其实这个过程也类似将text文本数据转为input_ids的过程。
解剖Qwen3VLForConditionalGeneration类
这个类是整个Qwen3-VL模型的入口类,废话不多说,整个类的主流程如下所示。
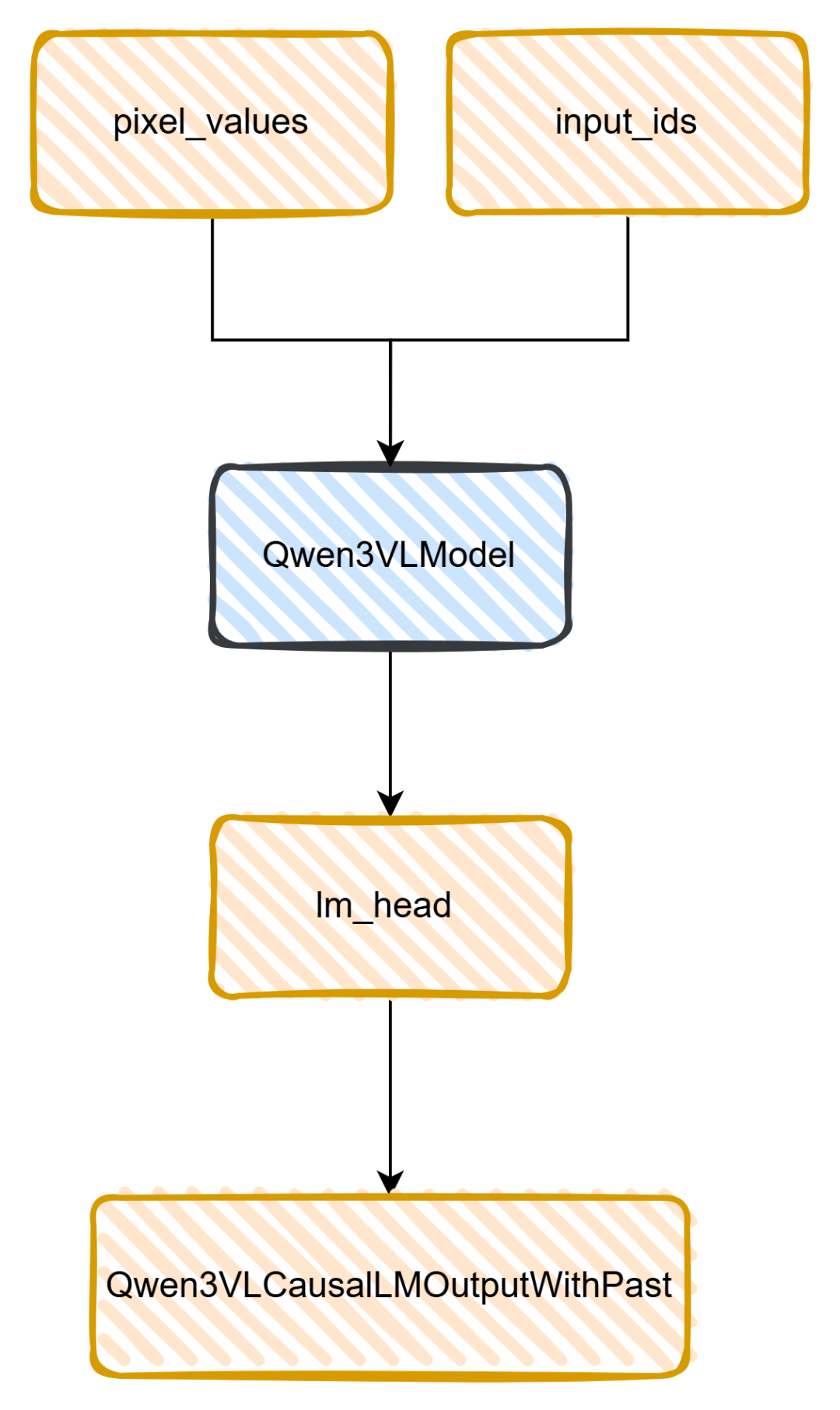
从上图可知:
第一步:输入是需要有pixel\_value和input\_ids;
第二步:将图像和文本的输出给到Qwen3-VL模型;
第三步:通过lm\_head(注意:lm\_head就是一个线性层,从代码可以查看)输出logist,并给到loss func 拿到loss输出;
第四步:给到Qwen3VLCausalLMOutputWithPast同统一格式输出。
可以对着上面的图和步骤看下面代码,你会非常清晰。
class Qwen3VLForConditionalGeneration(Qwen3VLPreTrainedModel, GenerationMixin):
_checkpoint_conversion_mapping = {}
_tied_weights_keys = ["lm_head.weight"]
# Reference: fix gemma3 grad acc #37208
accepts_loss_kwargs = False
config: Qwen3VLConfig
def __init__(self, config):
super().__init__(config)
self.model = Qwen3VLModel(config)
self.lm_head = nn.Linear(config.text_config.hidden_size, config.text_config.vocab_size, bias=False)
self.post_init()
def get_input_embeddings(self):
return self.model.get_input_embeddings()
def set_input_embeddings(self, value):
self.model.set_input_embeddings(value)
def set_decoder(self, decoder):
self.model.set_decoder(decoder)
def get_decoder(self):
return self.model.get_decoder()
def get_video_features(
self, pixel_values_videos: torch.FloatTensor, video_grid_thw: Optional[torch.LongTensor] = None
):
return self.model.get_video_features(pixel_values_videos, video_grid_thw)
def get_image_features(self, pixel_values: torch.FloatTensor, image_grid_thw: Optional[torch.LongTensor] = None):
return self.model.get_image_features(pixel_values, image_grid_thw)
# Make modules available through conditional class for BC
@property
def language_model(self):
return self.model.language_model
@property
def visual(self):
return self.model.visual
@can_return_tuple
@auto_docstring
def forward(
self,
input_ids: torch.LongTensor = None,
attention_mask: Optional[torch.Tensor] = None,
position_ids: Optional[torch.LongTensor] = None,
past_key_values: Optional[Cache] = None,
inputs_embeds: Optional[torch.FloatTensor] = None,
labels: Optional[torch.LongTensor] = None,
pixel_values: Optional[torch.Tensor] = None,
pixel_values_videos: Optional[torch.FloatTensor] = None,
image_grid_thw: Optional[torch.LongTensor] = None,
video_grid_thw: Optional[torch.LongTensor] = None,
cache_position: Optional[torch.LongTensor] = None,
logits_to_keep: Union[int, torch.Tensor] = 0,
**kwargs: Unpack[TransformersKwargs],
) -> Union[tuple, Qwen3VLCausalLMOutputWithPast]:
r"""
labels (`torch.LongTensor` of shape `(batch_size, sequence_length)`, *optional*):
Labels for computing the masked language modeling loss. Indices should either be in `[0, ...,
config.vocab_size]` or -100 (see `input_ids` docstring). Tokens with indices set to `-100` are ignored
(masked), the loss is only computed for the tokens with labels in `[0, ..., config.vocab_size]`.
image_grid_thw (`torch.LongTensor` of shape `(num_images, 3)`, *optional*):
The temporal, height and width of feature shape of each image in LLM.
video_grid_thw (`torch.LongTensor` of shape `(num_videos, 3)`, *optional*):
The temporal, height and width of feature shape of each video in LLM.
Example:
TODO: Add example
"""
outputs = self.model(
input_ids=input_ids,
pixel_values=pixel_values,
pixel_values_videos=pixel_values_videos,
image_grid_thw=image_grid_thw,
video_grid_thw=video_grid_thw,
position_ids=position_ids,
attention_mask=attention_mask,
past_key_values=past_key_values,
inputs_embeds=inputs_embeds,
cache_position=cache_position,
**kwargs,
)
hidden_states = outputs[0]
# Only compute necessary logits, and do not upcast them to float if we are not computing the loss
slice_indices = slice(-logits_to_keep, None) if isinstance(logits_to_keep, int) else logits_to_keep
logits = self.lm_head(hidden_states[:, slice_indices, :])
loss = None
if labels is not None:
loss = self.loss_function(logits=logits, labels=labels, vocab_size=self.config.text_config.vocab_size)
return Qwen3VLCausalLMOutputWithPast(
loss=loss,
logits=logits,
past_key_values=outputs.past_key_values,
hidden_states=outputs.hidden_states,
attentions=outputs.attentions,
rope_deltas=outputs.rope_deltas,
)
接下来我们就来看看Qwen3VLModel,它是怎么处理pixel和input_ids的。
解剖Qwen3VLModel类
这个类相对复杂点,我们也只针对主流程进行讲解,如果涉及到其他的处理,也会讲解,详细的可以看下面的图,便于理解。
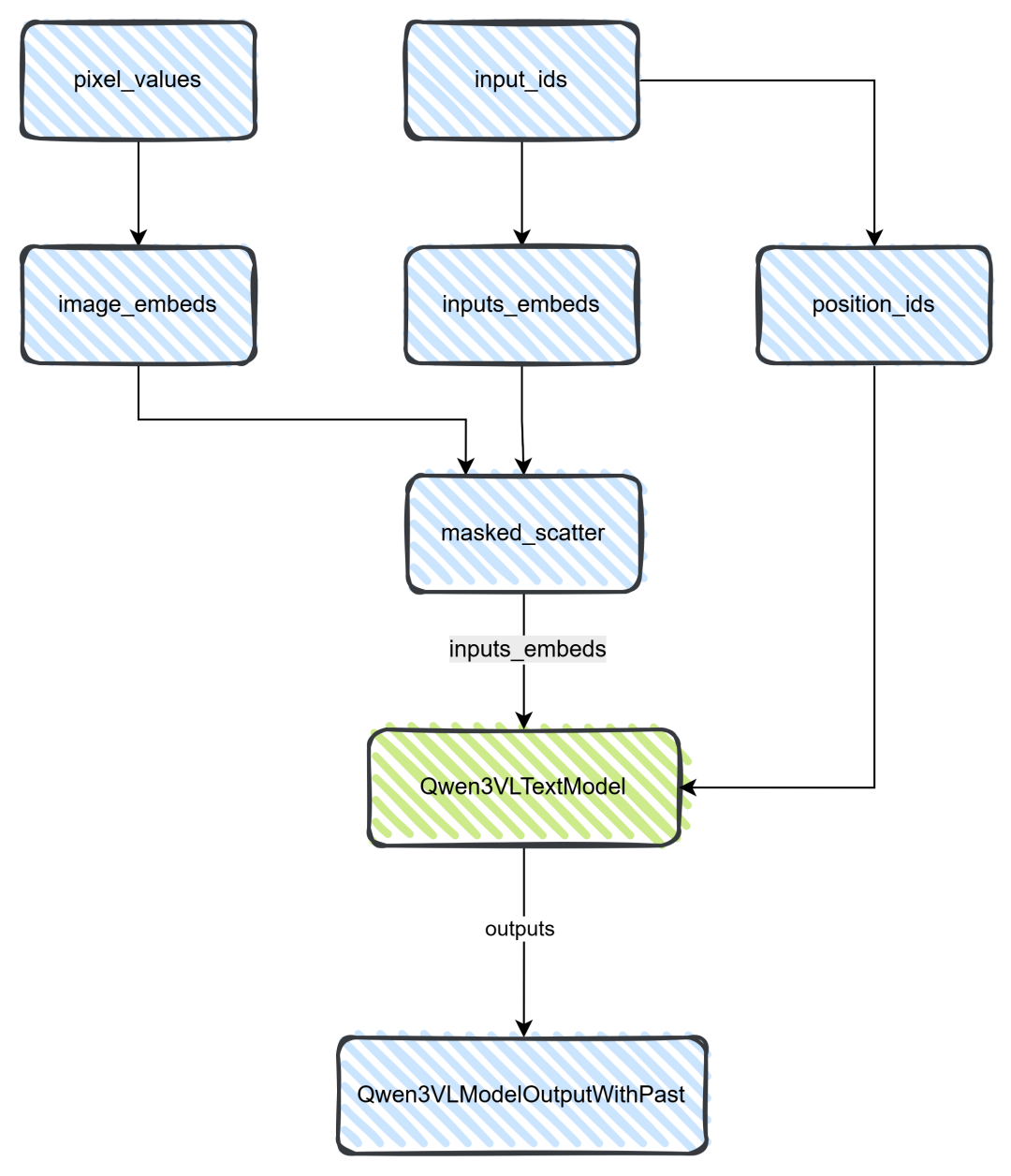
从上图可知:
第一步:piexl_value会通过get_image_features得到image_embeds;input_ids则通过get_input_embeddings得到inputs_embeds;
第二步:masked_scatter则将image_embeds嵌入到input_ids当中(<|im_start|>和 <|im_end|>),得到一个新的inputs_embeds;
第三步:inputs_embeds给到Qwen3VLTextModel(注意:这是一个大语言模型);
第四步:大语言模型的输出给到Qwen3VLModelOutputWithPast类,统一规则输出。
class Qwen3VLModel(Qwen3VLPreTrainedModel):
base_model_prefix = ""
_checkpoint_conversion_mapping = {}
# Reference: fix gemma3 grad acc #37208
accepts_loss_kwargs = False
config: Qwen3VLConfig
_no_split_modules = ["Qwen3VLTextDecoderLayer", "Qwen3VLVisionBlock"]
def __init__(self, config):
super().__init__(config)
self.visual = Qwen3VLVisionModel._from_config(config.vision_config)
self.language_model = Qwen3VLTextModel._from_config(config.text_config)
self.rope_deltas = None # cache rope_deltas here
# Initialize weights and apply final processing
self.post_init()
def get_input_embeddings(self):
return self.language_model.get_input_embeddings()
def set_input_embeddings(self, value):
self.language_model.set_input_embeddings(value)
def set_decoder(self, decoder):
self.language_model = decoder
def get_decoder(self):
return self.language_model
def get_rope_index(
self,
input_ids: Optional[torch.LongTensor] = None,
image_grid_thw: Optional[torch.LongTensor] = None,
video_grid_thw: Optional[torch.LongTensor] = None,
attention_mask: Optional[torch.Tensor] = None,
) -> tuple[torch.Tensor, torch.Tensor]:
"""Different from the original implementation, Qwen3VL use timestamps rather than absolute time position ids."""
# Since we use timestamps to seperate videos, like <t1> <vision_start> <frame1> <vision_end> <t2> <vision_start> <frame2> <vision_end>, the video_grid_thw should also be split
if video_grid_thw is not None:
video_grid_thw = torch.repeat_interleave(video_grid_thw, video_grid_thw[:, 0], dim=0)
video_grid_thw[:, 0] = 1
spatial_merge_size = self.config.vision_config.spatial_merge_size
image_token_id = self.config.image_token_id
video_token_id = self.config.video_token_id
vision_start_token_id = self.config.vision_start_token_id
mrope_position_deltas = []
if input_ids is not None and (image_grid_thw is not None or video_grid_thw is not None):
total_input_ids = input_ids
if attention_mask is None:
attention_mask = torch.ones_like(total_input_ids)
position_ids = torch.ones(
3,
input_ids.shape[0],
input_ids.shape[1],
dtype=input_ids.dtype,
device=input_ids.device,
)
image_index, video_index = 0, 0
attention_mask = attention_mask.to(total_input_ids.device)
for i, input_ids in enumerate(total_input_ids):
input_ids = input_ids[attention_mask[i] == 1]
image_nums, video_nums = 0, 0
vision_start_indices = torch.argwhere(input_ids == vision_start_token_id).squeeze(1)
vision_tokens = input_ids[vision_start_indices + 1]
image_nums = (vision_tokens == image_token_id).sum()
video_nums = (vision_tokens == video_token_id).sum()
input_tokens = input_ids.tolist()
llm_pos_ids_list: list = []
st = 0
remain_images, remain_videos = image_nums, video_nums
for _ in range(image_nums + video_nums):
if image_token_id in input_tokens and remain_images > 0:
ed_image = input_tokens.index(image_token_id, st)
else:
ed_image = len(input_tokens) + 1
if video_token_id in input_tokens and remain_videos > 0:
ed_video = input_tokens.index(video_token_id, st)
else:
ed_video = len(input_tokens) + 1
if ed_image < ed_video:
t, h, w = (
image_grid_thw[image_index][0],
image_grid_thw[image_index][1],
image_grid_thw[image_index][2],
)
image_index += 1
remain_images -= 1
ed = ed_image
else:
t, h, w = (
video_grid_thw[video_index][0],
video_grid_thw[video_index][1],
video_grid_thw[video_index][2],
)
video_index += 1
remain_videos -= 1
ed = ed_video
llm_grid_t, llm_grid_h, llm_grid_w = (
t.item(),
h.item() // spatial_merge_size,
w.item() // spatial_merge_size,
)
text_len = ed - st
st_idx = llm_pos_ids_list[-1].max() + 1 if len(llm_pos_ids_list) > 0 else 0
llm_pos_ids_list.append(torch.arange(text_len).view(1, -1).expand(3, -1) + st_idx)
# t_index is always 0 because llm_grid_t is always 1 (we use timestamps to encode the temporal information for videos)
t_index = torch.arange(llm_grid_t).view(-1, 1).expand(-1, llm_grid_h * llm_grid_w).flatten()
h_index = torch.arange(llm_grid_h).view(1, -1, 1).expand(llm_grid_t, -1, llm_grid_w).flatten()
w_index = torch.arange(llm_grid_w).view(1, 1, -1).expand(llm_grid_t, llm_grid_h, -1).flatten()
llm_pos_ids_list.append(torch.stack([t_index, h_index, w_index]) + text_len + st_idx)
st = ed + llm_grid_t * llm_grid_h * llm_grid_w
if st < len(input_tokens):
st_idx = llm_pos_ids_list[-1].max() + 1 if len(llm_pos_ids_list) > 0 else 0
text_len = len(input_tokens) - st
llm_pos_ids_list.append(torch.arange(text_len).view(1, -1).expand(3, -1) + st_idx)
llm_positions = torch.cat(llm_pos_ids_list, dim=1).reshape(3, -1)
position_ids[..., i, attention_mask[i] == 1] = llm_positions.to(position_ids.device)
mrope_position_deltas.append(llm_positions.max() + 1 - len(total_input_ids[i]))
mrope_position_deltas = torch.tensor(mrope_position_deltas, device=input_ids.device).unsqueeze(1)
return position_ids, mrope_position_deltas
else:
if attention_mask is not None:
position_ids = attention_mask.long().cumsum(-1) - 1
position_ids.masked_fill_(attention_mask == 0, 1)
position_ids = position_ids.unsqueeze(0).expand(3, -1, -1).to(attention_mask.device)
max_position_ids = position_ids.max(0, keepdim=False)[0].max(-1, keepdim=True)[0]
mrope_position_deltas = max_position_ids + 1 - attention_mask.shape[-1]
else:
position_ids = (
torch.arange(input_ids.shape[1], device=input_ids.device)
.view(1, 1, -1)
.expand(3, input_ids.shape[0], -1)
)
mrope_position_deltas = torch.zeros(
[input_ids.shape[0], 1],
device=input_ids.device,
dtype=input_ids.dtype,
)
return position_ids, mrope_position_deltas
def get_video_features(
self, pixel_values_videos: torch.FloatTensor, video_grid_thw: Optional[torch.LongTensor] = None
):
"""
Encodes videos into continuous embeddings that can be forwarded to the language model. The deepstack visual features are also returned.
Args:
pixel_values_videos (`torch.FloatTensor` of shape `(batch_size, num_channels, image_size, image_size)`):
The tensors corresponding to the input videos.
video_grid_thw (`torch.LongTensor` of shape `(num_videos, 3)`, *optional*):
The temporal, height and width of feature shape of each video in LLM.
"""
# Same implementation as for images
return self.get_image_features(pixel_values_videos, video_grid_thw)
def get_image_features(self, pixel_values: torch.FloatTensor, image_grid_thw: Optional[torch.LongTensor] = None):
"""
Encodes images into continuous embeddings that can be forwarded to the language model. The deepstack visual features are also returned.
Args:
pixel_values (`torch.FloatTensor` of shape `(batch_size, num_channels, image_size, image_size)`):
The tensors corresponding to the input images.
image_grid_thw (`torch.LongTensor` of shape `(num_images, 3)`, *optional*):
The temporal, height and width of feature shape of each image in LLM.
"""
pixel_values = pixel_values.type(self.visual.dtype)
image_embeds, deepstack_image_embeds = self.visual(pixel_values, grid_thw=image_grid_thw)
split_sizes = (image_grid_thw.prod(-1) // self.visual.spatial_merge_size**2).tolist()
image_embeds = torch.split(image_embeds, split_sizes)
return image_embeds, deepstack_image_embeds
def get_placeholder_mask(
self,
input_ids: torch.LongTensor,
inputs_embeds: torch.FloatTensor,
image_features: Optional[torch.FloatTensor] = None,
video_features: Optional[torch.FloatTensor] = None,
):
"""
Obtains multimodal placeholder mask from `input_ids` or `inputs_embeds`, and checks that the placeholder token count is
equal to the length of multimodal features. If the lengths are different, an error is raised.
"""
if input_ids is None:
special_image_mask = inputs_embeds == self.get_input_embeddings()(
torch.tensor(self.config.image_token_id, dtype=torch.long, device=inputs_embeds.device)
)
special_image_mask = special_image_mask.all(-1)
special_video_mask = inputs_embeds == self.get_input_embeddings()(
torch.tensor(self.config.video_token_id, dtype=torch.long, device=inputs_embeds.device)
)
special_video_mask = special_video_mask.all(-1)
else:
special_image_mask = input_ids == self.config.image_token_id
special_video_mask = input_ids == self.config.video_token_id
n_image_tokens = special_image_mask.sum()
special_image_mask = special_image_mask.unsqueeze(-1).expand_as(inputs_embeds).to(inputs_embeds.device)
if image_features is not None and inputs_embeds[special_image_mask].numel() != image_features.numel():
raise ValueError(
f"Image features and image tokens do not match: tokens: {n_image_tokens}, features {image_features.shape[0]}"
)
n_video_tokens = special_video_mask.sum()
special_video_mask = special_video_mask.unsqueeze(-1).expand_as(inputs_embeds).to(inputs_embeds.device)
if video_features is not None and inputs_embeds[special_video_mask].numel() != video_features.numel():
raise ValueError(
f"Videos features and video tokens do not match: tokens: {n_video_tokens}, features {video_features.shape[0]}"
)
return special_image_mask, special_video_mask
@auto_docstring
@can_return_tuple
def forward(
self,
input_ids: torch.LongTensor = None,
attention_mask: Optional[torch.Tensor] = None,
position_ids: Optional[torch.LongTensor] = None,
past_key_values: Optional[Cache] = None,
inputs_embeds: Optional[torch.FloatTensor] = None,
pixel_values: Optional[torch.Tensor] = None,
pixel_values_videos: Optional[torch.FloatTensor] = None,
image_grid_thw: Optional[torch.LongTensor] = None,
video_grid_thw: Optional[torch.LongTensor] = None,
cache_position: Optional[torch.LongTensor] = None,
**kwargs: Unpack[TransformersKwargs],
) -> Union[tuple, Qwen3VLModelOutputWithPast]:
r"""
image_grid_thw (`torch.LongTensor` of shape `(num_images, 3)`, *optional*):
The temporal, height and width of feature shape of each image in LLM.
video_grid_thw (`torch.LongTensor` of shape `(num_videos, 3)`, *optional*):
The temporal, height and width of feature shape of each video in LLM.
"""
if (input_ids is None) ^ (inputs_embeds is not None):
raise ValueError("You must specify exactly one of input_ids or inputs_embeds")
if inputs_embeds is None:
inputs_embeds = self.get_input_embeddings()(input_ids)
image_mask = None
video_mask = None
if pixel_values is not None:
image_embeds, deepstack_image_embeds = self.get_image_features(pixel_values, image_grid_thw)
image_embeds = torch.cat(image_embeds, dim=0).to(inputs_embeds.device, inputs_embeds.dtype)
image_mask, _ = self.get_placeholder_mask(
input_ids, inputs_embeds=inputs_embeds, image_features=image_embeds
)
inputs_embeds = inputs_embeds.masked_scatter(image_mask, image_embeds)
if pixel_values_videos is not None:
video_embeds, deepstack_video_embeds = self.get_video_features(pixel_values_videos, video_grid_thw)
video_embeds = torch.cat(video_embeds, dim=0).to(inputs_embeds.device, inputs_embeds.dtype)
_, video_mask = self.get_placeholder_mask(
input_ids, inputs_embeds=inputs_embeds, video_features=video_embeds
)
inputs_embeds = inputs_embeds.masked_scatter(video_mask, video_embeds)
visual_pos_masks = None
deepstack_visual_embeds = None
if image_mask is not None and video_mask is not None:
# aggregate visual_pos_masks and deepstack_visual_embeds
image_mask = image_mask[..., 0]
video_mask = video_mask[..., 0]
visual_pos_masks = image_mask | video_mask
deepstack_visual_embeds = []
image_mask_joint = image_mask[visual_pos_masks]
video_mask_joint = video_mask[visual_pos_masks]
for img_embed, vid_embed in zip(deepstack_image_embeds, deepstack_video_embeds):
embed_joint = img_embed.new_zeros(visual_pos_masks.sum(), img_embed.shape[-1]).to(img_embed.device)
embed_joint[image_mask_joint, :] = img_embed
embed_joint[video_mask_joint, :] = vid_embed
deepstack_visual_embeds.append(embed_joint)
elif image_mask is not None:
image_mask = image_mask[..., 0]
visual_pos_masks = image_mask
deepstack_visual_embeds = deepstack_image_embeds
elif video_mask is not None:
video_mask = video_mask[..., 0]
visual_pos_masks = video_mask
deepstack_visual_embeds = deepstack_video_embeds
if position_ids is None:
attention_mask_tensor = (
attention_mask if not isinstance(attention_mask, dict) else attention_mask["full_attention"]
)
if attention_mask_tensor is not None and attention_mask_tensor.ndim == 4:
attention_mask_tensor = torch.diagonal(attention_mask_tensor[:, 0], dim1=1, dim2=2)
# Only apply conversion for floating point tensors (inverted masks)
if attention_mask_tensor.dtype.is_floating_point:
attention_mask_tensor = attention_mask_tensor / torch.finfo(attention_mask_tensor.dtype).min
attention_mask_tensor = (1.0 - attention_mask_tensor).int()
# Calculate RoPE index once per generation in the pre-fill stage only.
# When compiling, we can't check tensor values thus we check only input length
# It is safe to assume that `length!=1` means we're in pre-fill because compiled
# models currently cannot do asssisted decoding
prefill_compiled_stage = is_torchdynamo_compiling() and (
(input_ids is not None and input_ids.shape[1] != 1)
or (inputs_embeds is not None and inputs_embeds.shape[1] != 1)
)
prefill_noncompiled_stage = not is_torchdynamo_compiling() and (
(cache_position is not None and cache_position[0] == 0)
or (past_key_values is None or past_key_values.get_seq_length() == 0)
)
if (prefill_compiled_stage or prefill_noncompiled_stage) or self.rope_deltas is None:
position_ids, rope_deltas = self.get_rope_index(
input_ids,
image_grid_thw,
video_grid_thw,
attention_mask=attention_mask_tensor,
)
self.rope_deltas = rope_deltas
# then use the prev pre-calculated rope-deltas to get the correct position ids
else:
batch_size, seq_length, _ = inputs_embeds.shape
delta = (
(cache_position[0] + self.rope_deltas).to(inputs_embeds.device)
if cache_position is not None
else 0
)
position_ids = torch.arange(seq_length, device=inputs_embeds.device)
position_ids = position_ids.view(1, -1).expand(batch_size, -1)
if cache_position is not None: # otherwise `deltas` is an int `0`
delta = delta.repeat_interleave(batch_size // delta.shape[0], dim=0)
position_ids = position_ids.add(delta)
position_ids = position_ids.unsqueeze(0).expand(3, -1, -1)
outputs = self.language_model(
input_ids=None,
position_ids=position_ids,
attention_mask=attention_mask,
past_key_values=past_key_values,
inputs_embeds=inputs_embeds,
cache_position=cache_position,
visual_pos_masks=visual_pos_masks,
deepstack_visual_embeds=deepstack_visual_embeds,
**kwargs,
)
return Qwen3VLModelOutputWithPast(
last_hidden_state=outputs.last_hidden_state,
past_key_values=outputs.past_key_values,
hidden_states=outputs.hidden_states,
attentions=outputs.attentions,
rope_deltas=self.rope_deltas,
)
从第三步可知,至此图片和文本数据已经嵌入在一起,给到大语言模型的输入当中,后面的流程就是按大语言模型的流程走了,没有其他的特殊情况了。
解剖Qwen3VLVisionModel视觉编码器
以为结束了?哈哈,还没,咱们再讲解下Qwen3-VL重要的一环视觉编码器。Qwen3-VL的视觉编码器没有使用clip或者siglip这种现有的编码器,而是自己重写了一个编码器。
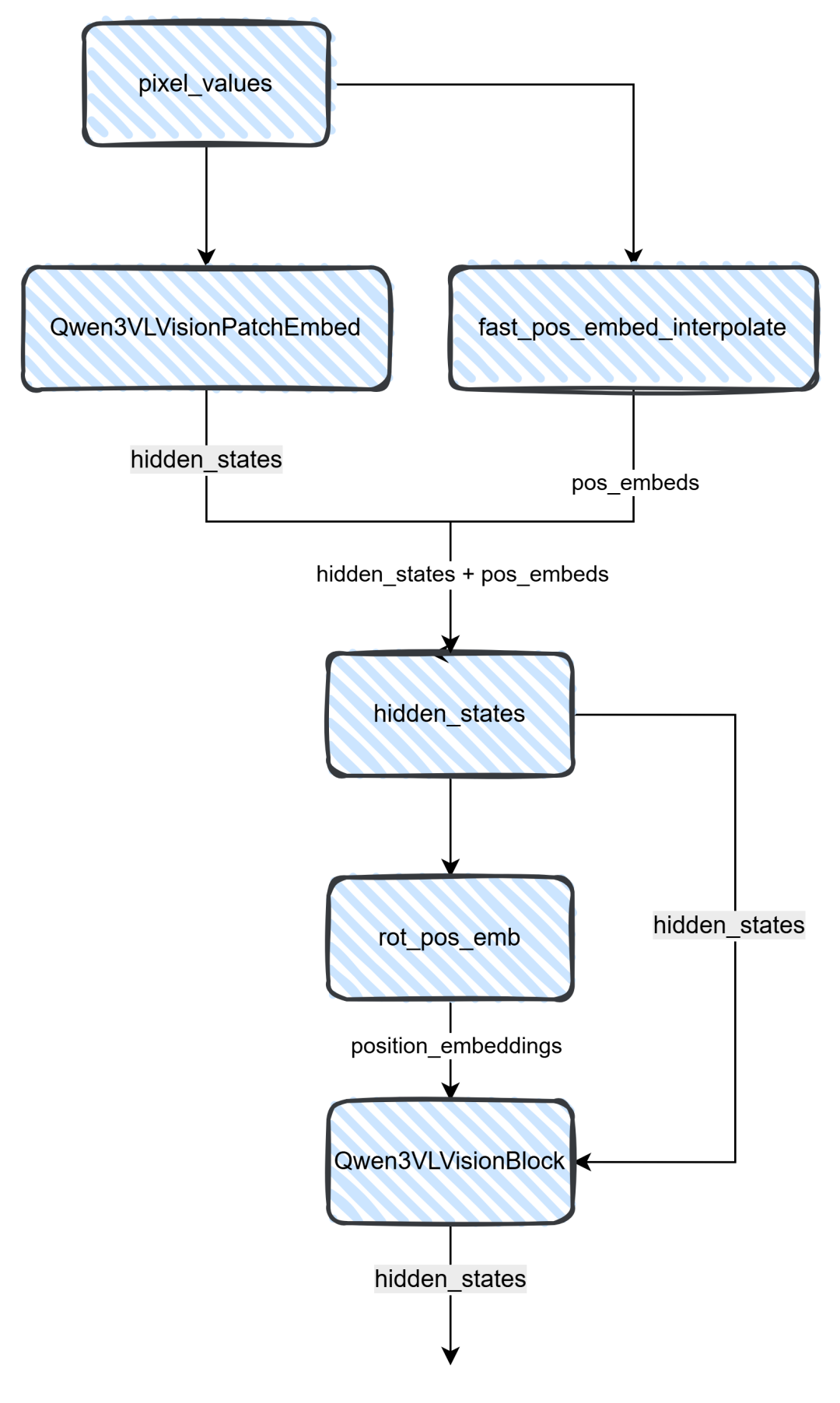
从上图可知,pixel通过Qwen3VLVisionPatchEmbed将图片转为hidden_states,而Qwen3VLVisionPatchEmbed则通过一个3维卷积来实现,然后将图片hidden_states信息(注意:图片patch为16)和位置编码结合,整合之后给到Qwen3VLVisionBlock模块,这个模块是一个Attention模块,它具有27层,具体的实现可以看下图。
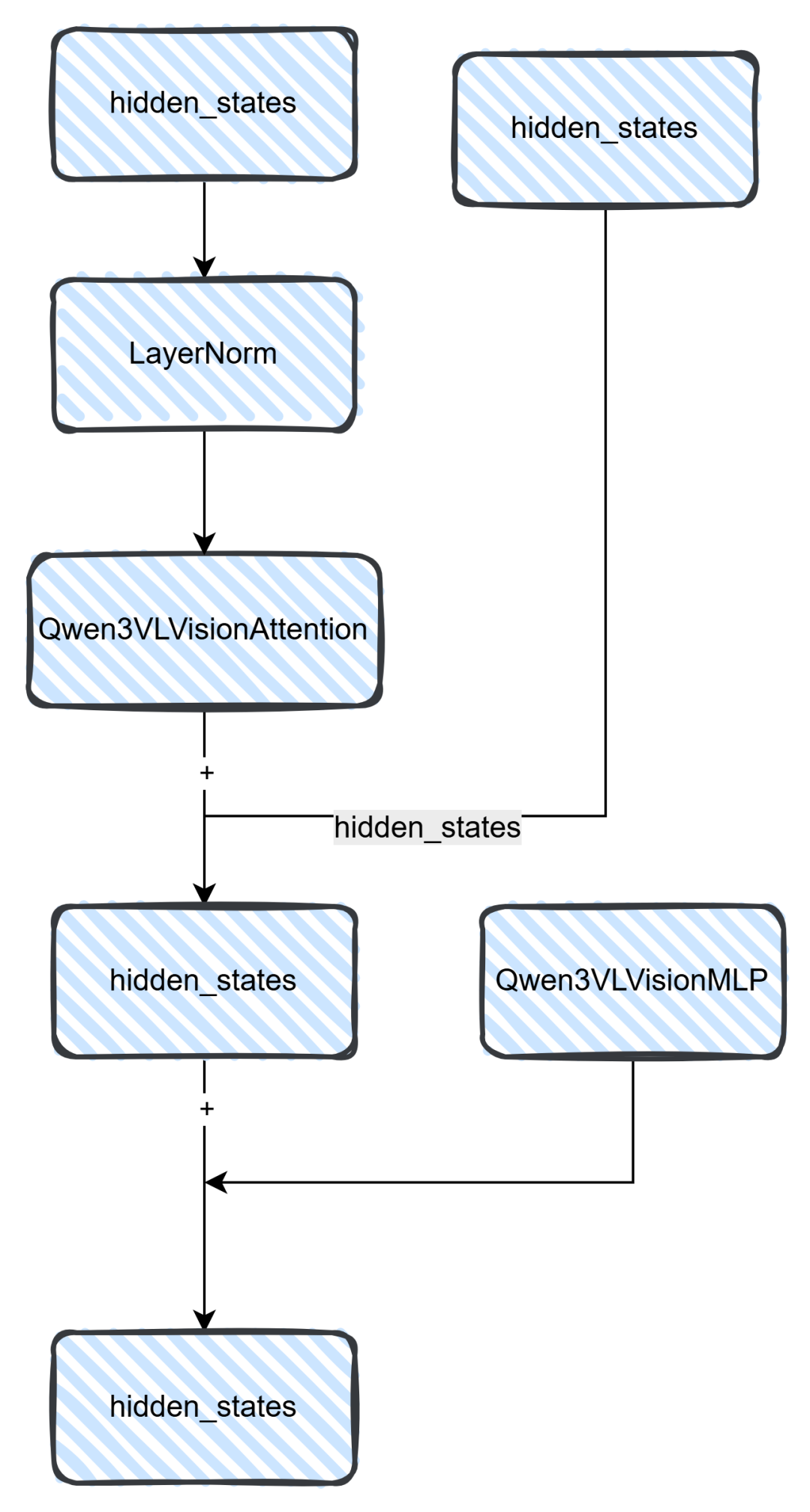
上图就是Block模块的具体内容,最后通过hidden_states和MLP层相加拿到最后的hidden_states。其代码实现可以看下面,Attention里面这里就不做过多的解析,无非就是QKV的计算
lass Qwen3VLVisionModel(Qwen3VLPreTrainedModel):
config: Qwen3VLVisionConfig
_no_split_modules = ["Qwen3VLVisionBlock"]
def __init__(self, config, *inputs, **kwargs) -> None:
super().__init__(config, *inputs, **kwargs)
self.spatial_merge_size = config.spatial_merge_size
self.patch_size = config.patch_size
self.spatial_merge_unit = self.spatial_merge_size * self.spatial_merge_size
self.patch_embed = Qwen3VLVisionPatchEmbed(
config=config,
)
self.pos_embed = nn.Embedding(config.num_position_embeddings, config.hidden_size)
self.num_grid_per_side = int(config.num_position_embeddings**0.5)
head_dim = config.hidden_size // config.num_heads
self.rotary_pos_emb = Qwen3VLVisionRotaryEmbedding(head_dim // 2)
self.blocks = nn.ModuleList([Qwen3VLVisionBlock(config) for _ in range(config.depth)])
self.merger = Qwen3VLVisionPatchMerger(
config=config,
use_postshuffle_norm=False,
)
self.deepstack_visual_indexes = config.deepstack_visual_indexes
self.deepstack_merger_list = nn.ModuleList(
[
Qwen3VLVisionPatchMerger(
config=config,
use_postshuffle_norm=True,
)
for _ in range(len(config.deepstack_visual_indexes))
]
)
self.gradient_checkpointing = False
def rot_pos_emb(self, grid_thw: torch.Tensor) -> torch.Tensor:
merge_size = self.spatial_merge_size
max_hw = int(grid_thw[:, 1:].max().item())
freq_table = self.rotary_pos_emb(max_hw) # (max_hw, dim // 2)
device = freq_table.device
total_tokens = int(torch.prod(grid_thw, dim=1).sum().item())
pos_ids = torch.empty((total_tokens, 2), dtype=torch.long, device=device)
offset = 0
for num_frames, height, width in grid_thw:
merged_h, merged_w = height // merge_size, width // merge_size
block_rows = torch.arange(merged_h, device=device) # block row indices
block_cols = torch.arange(merged_w, device=device) # block col indices
intra_row = torch.arange(merge_size, device=device) # intra-block row offsets
intra_col = torch.arange(merge_size, device=device) # intra-block col offsets
# Compute full-resolution positions
row_idx = block_rows[:, None, None, None] * merge_size + intra_row[None, None, :, None]
col_idx = block_cols[None, :, None, None] * merge_size + intra_col[None, None, None, :]
row_idx = row_idx.expand(merged_h, merged_w, merge_size, merge_size).reshape(-1)
col_idx = col_idx.expand(merged_h, merged_w, merge_size, merge_size).reshape(-1)
coords = torch.stack((row_idx, col_idx), dim=-1)
if num_frames > 1:
coords = coords.repeat(num_frames, 1)
num_tokens = coords.shape[0]
pos_ids[offset : offset + num_tokens] = coords
offset += num_tokens
embeddings = freq_table[pos_ids] # lookup rotary embeddings
embeddings = embeddings.flatten(1)
return embeddings
def fast_pos_embed_interpolate(self, grid_thw):
grid_ts, grid_hs, grid_ws = grid_thw[:, 0], grid_thw[:, 1], grid_thw[:, 2]
idx_list = [[] for _ in range(4)]
weight_list = [[] for _ in range(4)]
for t, h, w in zip(grid_ts, grid_hs, grid_ws):
h_idxs = torch.linspace(0, self.num_grid_per_side - 1, h)
w_idxs = torch.linspace(0, self.num_grid_per_side - 1, w)
h_idxs_floor = h_idxs.int()
w_idxs_floor = w_idxs.int()
h_idxs_ceil = (h_idxs.int() + 1).clip(max=self.num_grid_per_side - 1)
w_idxs_ceil = (w_idxs.int() + 1).clip(max=self.num_grid_per_side - 1)
dh = h_idxs - h_idxs_floor
dw = w_idxs - w_idxs_floor
base_h = h_idxs_floor * self.num_grid_per_side
base_h_ceil = h_idxs_ceil * self.num_grid_per_side
indices = [
(base_h[None].T + w_idxs_floor[None]).flatten(),
(base_h[None].T + w_idxs_ceil[None]).flatten(),
(base_h_ceil[None].T + w_idxs_floor[None]).flatten(),
(base_h_ceil[None].T + w_idxs_ceil[None]).flatten(),
]
weights = [
((1 - dh)[None].T * (1 - dw)[None]).flatten(),
((1 - dh)[None].T * dw[None]).flatten(),
(dh[None].T * (1 - dw)[None]).flatten(),
(dh[None].T * dw[None]).flatten(),
]
for i in range(4):
idx_list[i].extend(indices[i].tolist())
weight_list[i].extend(weights[i].tolist())
idx_tensor = torch.tensor(idx_list, dtype=torch.long, device=self.pos_embed.weight.device)
weight_tensor = torch.tensor(
weight_list, dtype=self.pos_embed.weight.dtype, device=self.pos_embed.weight.device
)
pos_embeds = self.pos_embed(idx_tensor) * weight_tensor[:, :, None]
patch_pos_embeds = pos_embeds[0] + pos_embeds[1] + pos_embeds[2] + pos_embeds[3]
patch_pos_embeds = patch_pos_embeds.split([h * w for h, w in zip(grid_hs, grid_ws)])
patch_pos_embeds_permute = []
merge_size = self.config.spatial_merge_size
for pos_embed, t, h, w in zip(patch_pos_embeds, grid_ts, grid_hs, grid_ws):
pos_embed = pos_embed.repeat(t, 1)
pos_embed = (
pos_embed.view(t, h // merge_size, merge_size, w // merge_size, merge_size, -1)
.permute(0, 1, 3, 2, 4, 5)
.flatten(0, 4)
)
patch_pos_embeds_permute.append(pos_embed)
patch_pos_embeds = torch.cat(patch_pos_embeds_permute)
return patch_pos_embeds
def forward(self, hidden_states: torch.Tensor, grid_thw: torch.Tensor, **kwargs) -> torch.Tensor:
"""
Args:
hidden_states (`torch.Tensor` of shape `(seq_len, hidden_size)`):
The final hidden states of the model.
grid_thw (`torch.Tensor` of shape `(num_images_or_videos, 3)`):
The temporal, height and width of feature shape of each image in LLM.
Returns:
`torch.Tensor`: hidden_states.
"""
hidden_states = self.patch_embed(hidden_states)
pos_embeds = self.fast_pos_embed_interpolate(grid_thw)
hidden_states = hidden_states + pos_embeds
rotary_pos_emb = self.rot_pos_emb(grid_thw)
seq_len, _ = hidden_states.size()
hidden_states = hidden_states.reshape(seq_len, -1)
rotary_pos_emb = rotary_pos_emb.reshape(seq_len, -1)
emb = torch.cat((rotary_pos_emb, rotary_pos_emb), dim=-1)
position_embeddings = (emb.cos(), emb.sin())
cu_seqlens = torch.repeat_interleave(grid_thw[:, 1] * grid_thw[:, 2], grid_thw[:, 0]).cumsum(
dim=0,
# Select dtype based on the following factors:
# - FA2 requires that cu_seqlens_q must have dtype int32
# - torch.onnx.export requires that cu_seqlens_q must have same dtype as grid_thw
# See https://github.com/huggingface/transformers/pull/34852 for more information
dtype=grid_thw.dtype if torch.jit.is_tracing() else torch.int32,
)
cu_seqlens = F.pad(cu_seqlens, (1, 0), value=0)
deepstack_feature_lists = []
for layer_num, blk in enumerate(self.blocks):
hidden_states = blk(
hidden_states,
cu_seqlens=cu_seqlens,
position_embeddings=position_embeddings,
**kwargs,
)
if layer_num in self.deepstack_visual_indexes:
deepstack_feature = self.deepstack_merger_list[self.deepstack_visual_indexes.index(layer_num)](
hidden_states
)
deepstack_feature_lists.append(deepstack_feature)
hidden_states = self.merger(hidden_states)
return hidden_states, deepstack_feature_lists
最后
为什么要学AI大模型
当下,⼈⼯智能市场迎来了爆发期,并逐渐进⼊以⼈⼯通⽤智能(AGI)为主导的新时代。企业纷纷官宣“ AI+ ”战略,为新兴技术⼈才创造丰富的就业机会,⼈才缺⼝将达 400 万!
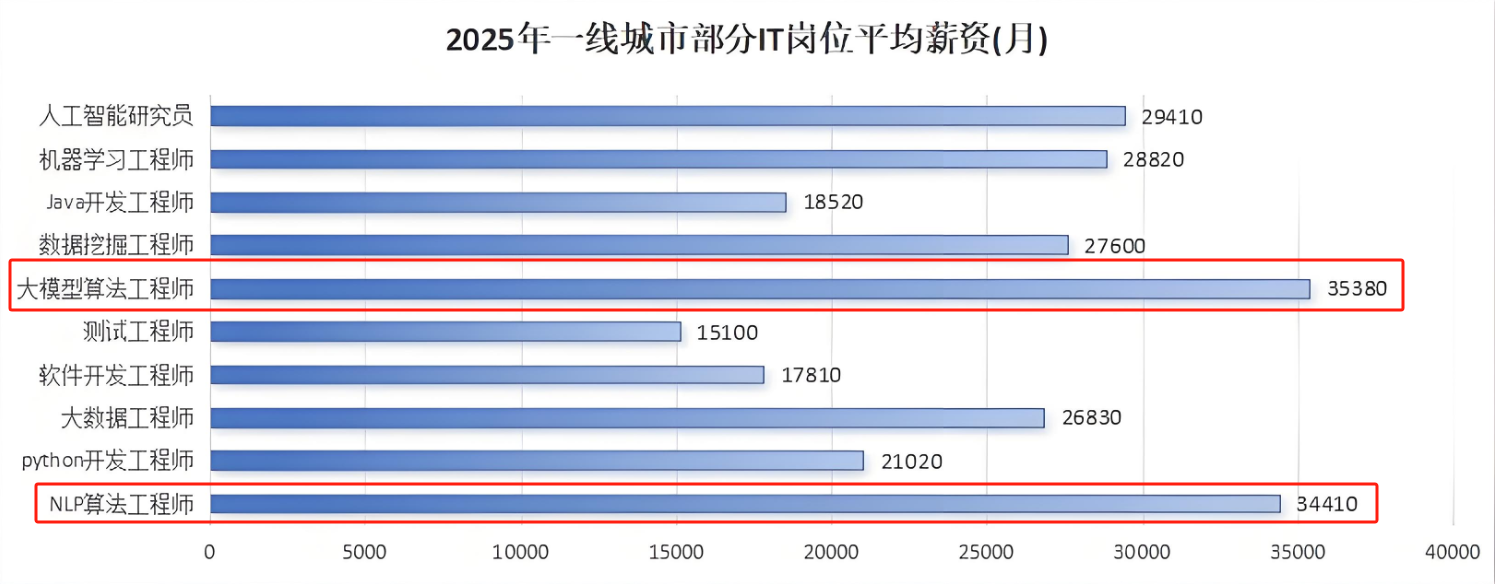
DeepSeek问世以来,生成式AI和大模型技术爆发式增长,让很多岗位重新成了炙手可热的新星,岗位薪资远超很多后端岗位,在程序员中稳居前列。
与此同时AI与各行各业深度融合,飞速发展,成为炙手可热的新风口,企业非常需要了解AI、懂AI、会用AI的员工,纷纷开出高薪招聘AI大模型相关岗位。
最近很多程序员朋友都已经学习或者准备学习 AI 大模型,后台也经常会有小伙伴咨询学习路线和学习资料,我特别拜托北京清华大学学士和美国加州理工学院博士学位的鲁为民老师给大家这里给大家准备了一份涵盖了AI大模型入门学习思维导图、精品AI大模型学习书籍手册、视频教程、实战学习等录播视频 全系列的学习资料,这些学习资料不仅深入浅出,而且非常实用,让大家系统而高效地掌握AI大模型的各个知识点。
这份完整版的大模型 AI 学习资料已经上传CSDN,朋友们如果需要可以微信扫描下方CSDN官方认证二维码免费领取【保证100%免费】
AI大模型系统学习路线
在面对AI大模型开发领域的复杂与深入,精准学习显得尤为重要。一份系统的技术路线图,不仅能够帮助开发者清晰地了解从入门到精通所需掌握的知识点,还能提供一条高效、有序的学习路径。

但知道是一回事,做又是另一回事,初学者最常遇到的问题主要是理论知识缺乏、资源和工具的限制、模型理解和调试的复杂性,在这基础上,找到高质量的学习资源,不浪费时间、不走弯路,又是重中之重。
AI大模型入门到实战的视频教程+项目包
看视频学习是一种高效、直观、灵活且富有吸引力的学习方式,可以更直观地展示过程,能有效提升学习兴趣和理解力,是现在获取知识的重要途径

光学理论是没用的,要学会跟着一起敲,要动手实操,才能将自己的所学运用到实际当中去,这时候可以搞点实战案例来学习。
海量AI大模型必读的经典书籍(PDF)
阅读AI大模型经典书籍可以帮助读者提高技术水平,开拓视野,掌握核心技术,提高解决问题的能力,同时也可以借鉴他人的经验。对于想要深入学习AI大模型开发的读者来说,阅读经典书籍是非常有必要的。
600+AI大模型报告(实时更新)
这套包含640份报告的合集,涵盖了AI大模型的理论研究、技术实现、行业应用等多个方面。无论您是科研人员、工程师,还是对AI大模型感兴趣的爱好者,这套报告合集都将为您提供宝贵的信息和启示。
AI大模型面试真题+答案解析
我们学习AI大模型必然是想找到高薪的工作,下面这些面试题都是总结当前最新、最热、最高频的面试题,并且每道题都有详细的答案,面试前刷完这套面试题资料,小小offer,不在话下

这份完整版的大模型 AI 学习资料已经上传CSDN,朋友们如果需要可以微信扫描下方CSDN官方认证二维码免费领取【保证100%免费】

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 22
22 0
0- 0



 已为社区贡献416条内容
已为社区贡献416条内容

所有评论(0)