基于Mid-360从 FAST-LIO 点云到导航地图:去顶、滤波、PGM/YAML 生成及 GIMP 优化全流程详解
本文详细讲解了如何将Livox Mid-360和FAST-LIO生成的原始点云,一步步处理为ROS导航可用的二维栅格地图。内容涵盖:点云去顶与滤波、PCL/OpenCV生成PGM地图与YAML配置文件、以及使用GIMP进行地图后优化的完整实战流程。为移动机器人导航提供了一套开箱即用的建图解决方案
基于Mid-360与FAST-LIO的导航地图生成全流程技术大纲
技术背景与目标
- FAST-LIO实时建图与点云保存机制:介绍
mapping_mid360.launch中pcd_save_enable参数的作用及PCD文件生成逻辑 - 导航地图需求:去顶(移除天花板点云)、动态物体滤波、PGM/YAML格式适配SLAM框架(如ROS导航栈)
FAST-LIO点云数据预处理流程
先保证雷达(Mid-360的驱动正常安装,并且在它的环境下面正常配置了FAST-LIO算法),进入工作空间,先输入下列代码保证雷达和FAST-LIO正常工作
#进入工作空间,启动雷达
source devel/setup.bash
roslaunch livox_ros_driver2 msg_MID360.launch
#重开一个终端,启动FAST_LIO
source devel/setup.bash
roslaunch fast_lio mapping_mid360.launch 这个时候Rviz会正常弹出打开,使用者可以通过自己的雷达开始建图,到Rviz中已经显示觉得不错的图像的时候,这个时候在运行了FAST-LIO的终端中按住Ctrl+c ,中断建图。
PCD文件获取与初始处理
- 环境配置:FAST-LIO运行环境(ROS、Livox Mid-360驱动)、PCD文件存储路径设置(默认配置到/FAST-LIO/PCD文件夹中)
- 点云特性分析:Mid-360点云密度、噪声分布、动态物体干扰
-
承接上述建图,为了获取点云文件,首先要保证mapping_mid360.launch中已经配置
<param name="pcd save enabkle" value="1">若没有配置,则无法在/FAST-LIO/PCD文件夹中看到默认的scans.pcd输出
PCD文件后续去顶,动态滤波,转.pgm和.yaml文件的操作:
去顶处理(remove_ceiling.cpp)
- 算法原理:基于高度阈值或RANSAC平面分割的天花板检测
- 实现细节:PCL库调用、去顶后点云可视化验证
#include <pcl/io/pcd_io.h> #include <pcl/filters/passthrough.h> #include <iostream> int main(int argc, char**argv) { // 加载点云文件,这里假设要处理的点云文件是 scans3.pcd,若实际文件名不同需修改 pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>); if (pcl::io::loadPCDFile<pcl::PointXYZ>("../scans3.pcd", *cloud) == -1) { std::cerr << "错误:无法加载 scans3.pcd 文件!请检查文件是否存在或路径是否正确" << std::endl; return -1; } std::cout << "原始点云包含 " << cloud->points.size() << " 个点" << std::endl; // 创建直通滤波器,用于过滤 Z 轴(高度)方向的点 pcl::PassThrough<pcl::PointXYZ> pass; pass.setInputCloud(cloud); pass.setFilterFieldName("z"); // 指定过滤的字段为 Z 轴(高度) // 设置 Z 轴的过滤范围,这里保留 Z 轴在 0.0 到 1.8 之间的点,可根据实际场景调整范围 pass.setFilterLimits(0.0, 1.8); pcl::PointCloud<pcl::PointXYZ>::Ptr filtered_cloud(new pcl::PointCloud<pcl::PointXYZ>); pass.filter(*filtered_cloud); // 保存过滤后的点云文件,保存到桌面,文件名为 filtered_scans3.pcd pcl::io::savePCDFileASCII("../filtered_scans3.pcd", *filtered_cloud); std::cout << "过滤后点云包含 " << filtered_cloud->points.size() << " 个点" << std::endl; std::cout << "已将过滤后的点云保存为 filtered_scans3.pcd" << std::endl; return 0; }先在桌面建立一个名叫remove_ceiling.cpp的文件,然后把上述代码复制进去,具体的参数可以按照自己的需求进行更改。去顶之后,pcd图像生成为这个样子
-
注意代码中的scans3,使用的时候一定要改为自己实际pcd的名字,至于filtered_scans3,读者为了方便可以不进行更改,从而方便下面的操作。
动态物体滤波(filter_dynamic.cpp)
- 方法选择:统计离群点移除(SOR)或时序一致性滤波
- 参数调优:动态物体与静态环境的分离阈值设置
-
#include <pcl/io/pcd_io.h> #include <pcl/point_types.h> #include <pcl/filters/radius_outlier_removal.h> #include <pcl/filters/statistical_outlier_removal.h> #include <iostream> int main() { // 1. 加载原始点云(路径适配新文件夹结构) pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>); if (pcl::io::loadPCDFile<pcl::PointXYZ>("~/Desktop/filtered_scans3.pcd", *cloud) == -1) { std::cerr << "错误:无法加载 filtered_scans3.pcd 文件!" << std::endl; return -1; } std::cout << "原始点云点数: " << cloud->points.size() << std::endl; // 2. 统计滤波(去除离群噪声) pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered_sor(new pcl::PointCloud<pcl::PointXYZ>); pcl::StatisticalOutlierRemoval<pcl::PointXYZ> sor; sor.setInputCloud(cloud); sor.setMeanK(50); sor.setStddevMulThresh(1.0); sor.filter(*cloud_filtered_sor); std::cout << "统计滤波后点数: " << cloud_filtered_sor->points.size() << std::endl; // 3. 半径滤波(去除动态障碍) pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_static(new pcl::PointCloud<pcl::PointXYZ>); pcl::RadiusOutlierRemoval<pcl::PointXYZ> ror; ror.setInputCloud(cloud_filtered_sor); ror.setRadiusSearch(0.5); ror.setMinNeighborsInRadius(10); ror.filter(*cloud_static); std::cout << "去除动态障碍后点数: " << cloud_static->points.size() << std::endl; // 4. 保存结果(保持保存到桌面) pcl::io::savePCDFileASCII("~/Desktop/static_cloud.pcd", *cloud_static); std::cout << "已保存静态点云到 static_cloud.pcd" << std::endl; return 0; }建立一个filter_dynamic.cpp,把上述代码复制进去,这个cpp的作用是生成一个滤波之后的pcd文件,滤波效果如下图所示

-
由此可见,现在的pcd图像已经很干净了,可以进行转化为pgm和yaml格式的操作了
PGM/YAML地图生成(pcd_to_pgm.cpp)
一、输入处理
-
静态点云加载(去除动态障碍后)
-
自动计算点云XY坐标边界
二、栅格地图生成
-
可调分辨率(默认0.05米/像素)
-
自动计算地图尺寸(宽高像素)
-
点云坐标到像素坐标转换
-
二值化处理:255=障碍物,0=自由空间
三、文件输出
-
PGM地图:灰度图像格式
-
YAML配置文件:包含关键元数据
-
image: 地图文件名
-
resolution: 分辨率
-
origin: 原点坐标
-
negate: 0(白为障碍)
-
occupied_thresh: 0.65
-
free_thresh: 0.196
-
四、ROS兼容性
-
标准PGM+YAML格式
-
预设参数优化(适配move_base)
-
固定桌面输出路径
#include <pcl/io/pcd_io.h> #include <pcl/point_types.h> #include <opencv2/opencv.hpp> #include <vector> #include <fstream> #include <pcl/io/pcd_io.h> #include <pcl/point_types.h> #include <opencv2/opencv.hpp> #include <vector> #include <fstream> int main() { // 1. 加载静态点云(去除动态障碍后的点云,调整为从桌面加载) pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>); if (pcl::io::loadPCDFile<pcl::PointXYZ>("/home/vd/Desktop/static_cloud.pcd", *cloud) == -1) { std::cerr << "错误:无法加载 static_cloud.pcd 文件!请检查文件是否存在" << std::endl; return -1; } // 2. 确定点云 x/y 坐标范围(用于计算地图尺寸) float min_x = FLT_MAX, max_x = FLT_MIN; float min_y = FLT_MAX, max_y = FLT_MIN; for (const auto& point : cloud->points) { min_x = std::min(min_x, point.x); max_x = std::max(max_x, point.x); min_y = std::min(min_y, point.y); max_y = std::max(max_y, point.y); } // 3. 设置地图分辨率(单位:米/像素,可根据需要调整) float resolution = 0.05; // 5厘米/像素,数值越小地图越精细 int width = static_cast<int>((max_x - min_x) / resolution) + 1; // 地图宽度(像素) int height = static_cast<int>((max_y - min_y) / resolution) + 1; // 地图高度(像素) // 4. 创建占据栅格地图(0=空闲,255=有障碍物) cv::Mat map = cv::Mat::zeros(height, width, CV_8UC1); // 初始化为黑色(空闲) for (const auto& point : cloud->points) { // 将点云坐标转换为地图像素坐标 int x = static_cast<int>((point.x - min_x) / resolution); int y = static_cast<int>((point.y - min_y) / resolution); // 确保坐标在地图范围内 if (x >= 0 && x < width && y >= 0 && y < height) { map.at<uchar>(y, x) = 255; // 标记为障碍物(白色) } } // 5. 保存为 PGM 格式地图(保存到桌面,move_base 可识别) cv::imwrite("/home/vd/Desktop/map.pgm", map); // 6. 生成配套的 YAML 配置文件(保存到桌面,move_base 必需) std::ofstream yaml_file("/home/vd/Desktop/map.yaml"); yaml_file << "image: map.pgm\n"; // PGM 地图文件名(相对于YAML文件的路径,这里都在桌面,可直接写文件名) yaml_file << "resolution: " << resolution << "\n"; // 分辨率(米/像素) yaml_file << "origin: [" << min_x << ", " << min_y << ", 0.0]\n"; // 地图原点(左下角坐标) yaml_file << "negate: 0\n"; // 0=白色表示障碍物,1=相反 yaml_file << "occupied_thresh: 0.65\n"; // 占据阈值 yaml_file << "free_thresh: 0.196\n"; // 空闲阈值 yaml_file.close(); std::cout << "地图生成完成!已在桌面保存 map.pgm 和 map.yaml" << std::endl; return 0; }这里的代码核心就是生成一个pmg文件和一个yaml配置文件,供给move_base一些基础的定位导航信息,在桌面上生成map.pgm和map.yaml
GIMP后处理优化
栅格地图编辑
- 噪声修复:手动擦除残留动态物体痕迹
- 边沿修复:手动修改边缘的建图噪声
在GIMP中打开所需要更改的pgm文件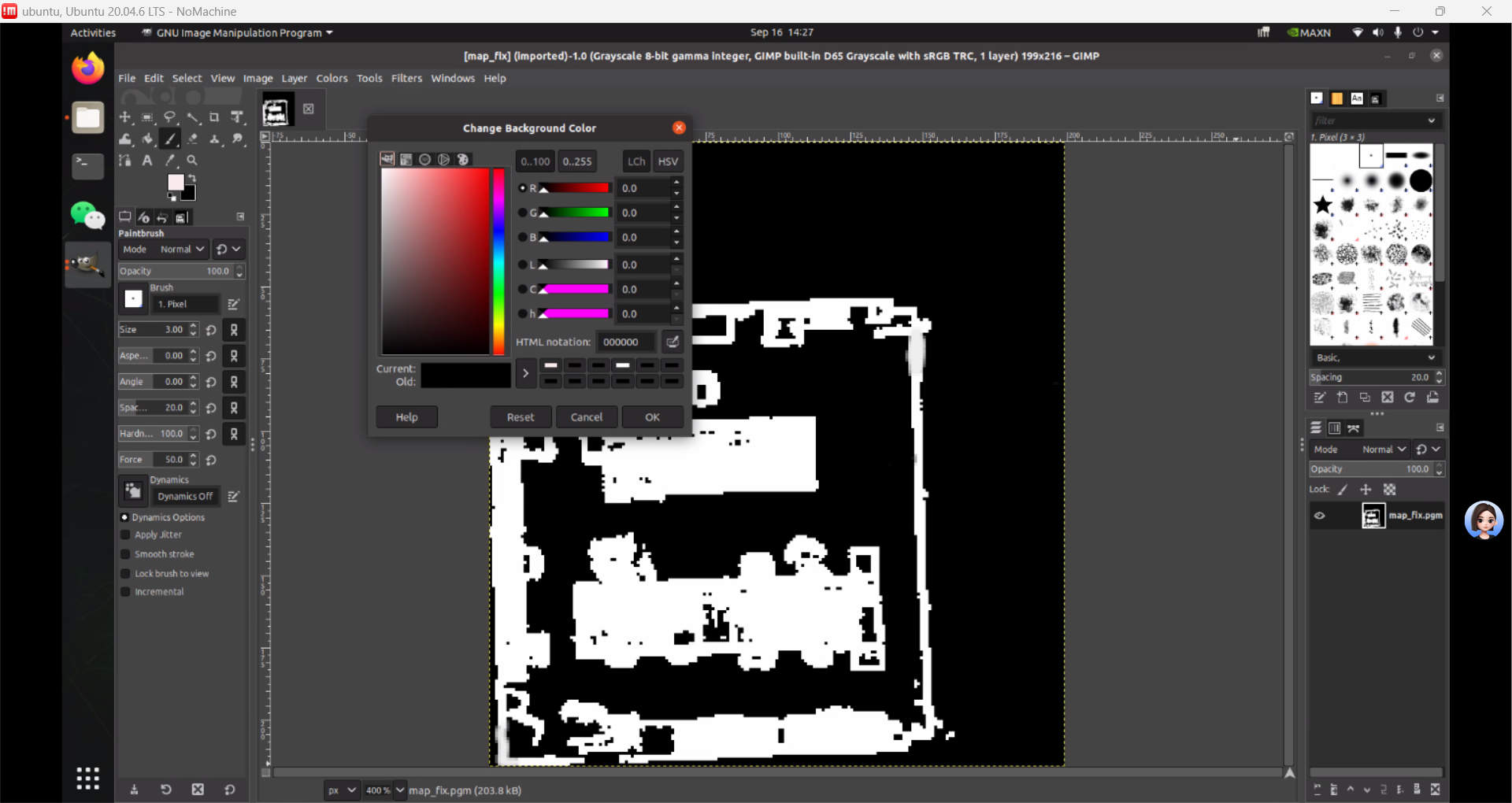
将不需要的障碍物(白色),手动涂为黑色 (通过点击这个换颜色)
(通过点击这个换颜色)
然后把current这个颜色换为我们目标的颜色,这个时候就可以进行更改了,更改完成后 ,点击file中的export as 在桌面中进行输出 便于修改目标的查询。(记得要把文件的后缀改为pgm格式)
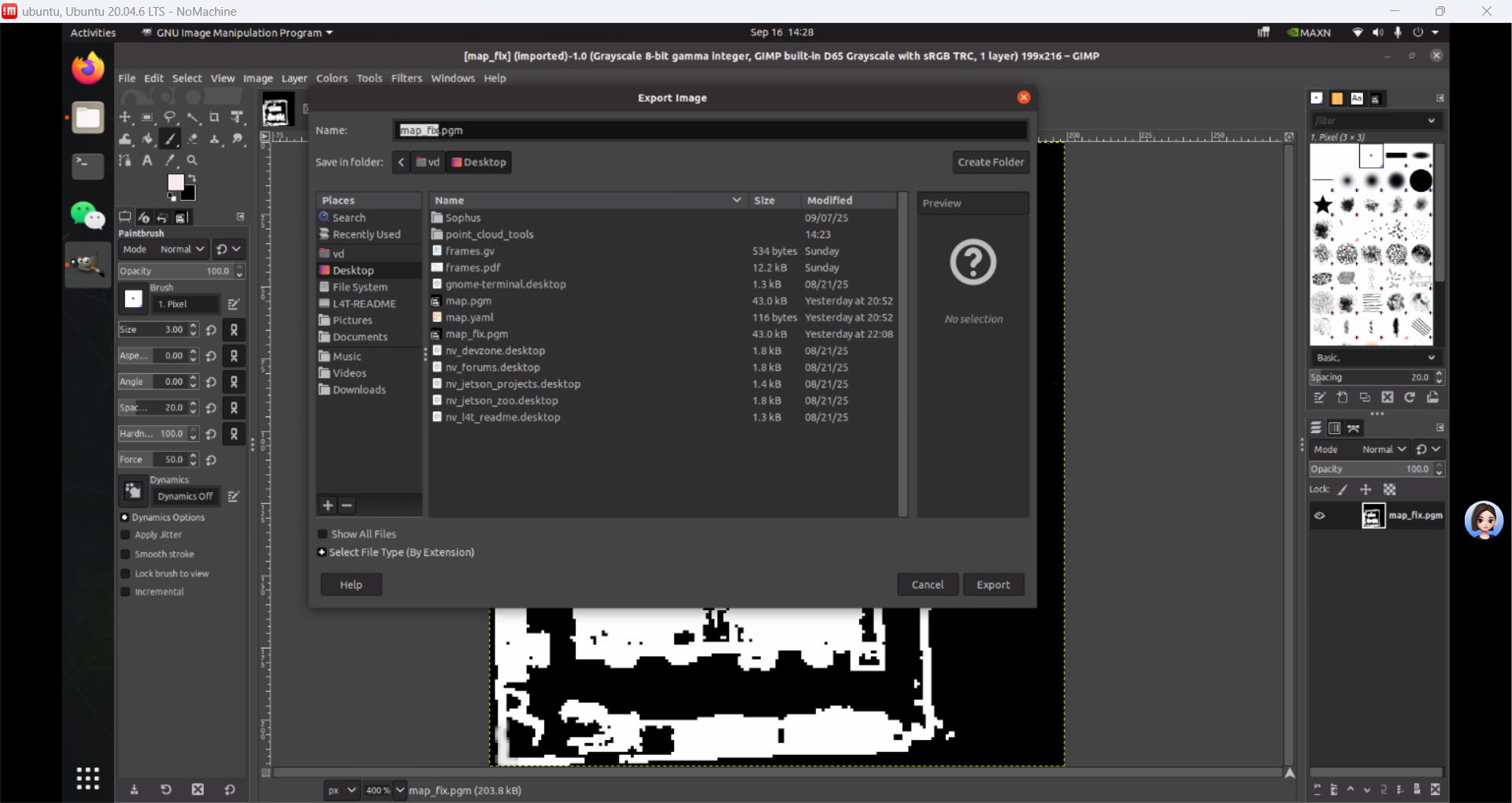
这个时候,按照自己的需求去修改之前的map.yaml文件,一般情况下,直接修改image中的文件名字,和修改的pgm名字符合就行了,至于更多的yaml参数设置,则需要自己更具情况设置。
三个.cpp文件的使用说明
在桌面上建立一个名字为point_cloud_tools的文件夹
然后把三个.cpp文件都放进去,之后生成可编译文件
# 进入 point_cloud_tools 目录
cd ~/Desktop/point_cloud_tools
# 进入 build 目录(若没有则创建)
mkdir -p build && cd build
# 生成编译配置
cmake ..
# 编译
make编译成功后,就可以开始脚本的使用了(在文件夹的终端下进行操作)
1.运行remove_ceiling(去顶)
cd ~/Desktop/point_cloud_tools/build
./remove_ceiling2.运行filter_dynamic(去动态障碍)
./filter_dynamic3.运行pcd_to_pgm(转PGM地图)
./pcd_to_pgm这三步的过程可能有些缓慢,可以通过查看CPU运行的方式看看脚本是不是在运行,要是CPU占用很大的话,说明在运行,要是CPU没有运行占比很高的话,则需要进行更加深度的检查。
运行完三个脚本之后,可以生成相关的.pmg格式文件和相关的.yaml文件,可以根据生成的情况来选择是否进行GIMP的修改。

中国智能体开发者社区,聚焦智能体与大模型开发,提供前沿资讯、实用工具链、开源项目及行业案例。通过技术沙龙、开发者大赛等活动,促进经验交流与协作,助力开发者快速构建创新智能应用。
更多推荐
 54
54 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)