Hough变换线段检测:OpenCV与VC++实现指南
OpenCV是一个开源的计算机视觉和机器学习软件库,它提供了一系列的编程接口,用于解决复杂的视觉应用问题。主要功能涵盖了图像处理、视频分析、特征提取、物体识别等领域。OpenCV的特点包括:跨平台性:OpenCV支持多种操作系统,如Windows、Linux、Mac OS等。高效性:通过优化代码,OpenCV在图像处理任务中表现得非常高效。丰富算法:提供了成千上万种算法,用于图像处理、模式识别、机

简介:本文深入探讨了如何使用OpenCV库和Visual C++(VC)实现Hough变换来检测图像中的线段。介绍了Hough变换的理论基础、实现步骤,并提供了完整的代码示例。通过这些步骤,读者可以学习到从图像加载到边缘检测,再到Hough变换和结果展示的整个流程,并能够根据实际需求调整关键参数。Hough变换是计算机视觉领域图像处理的一个重要组成部分,本教程将帮助读者深入理解并应用这一技术。 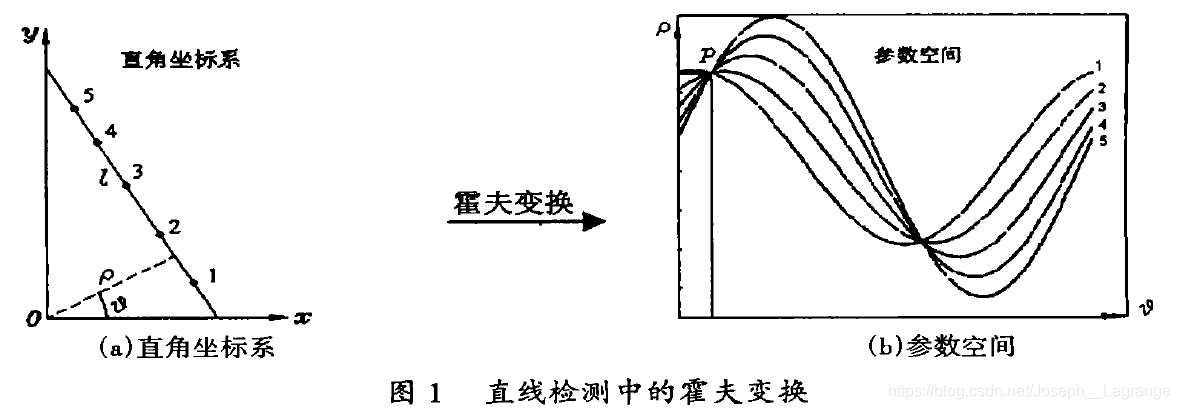
1. Hough变换基础与应用
在计算机视觉和图像分析领域中,Hough变换是一项基础而强大的技术,主要用于检测图像中的几何形状,尤其是直线和圆。它由Paul Hough在1962年提出,最初用于检测直线,但随着技术的发展,已经扩展到了检测曲线和任意形状。
1.1 Hough变换原理
Hough变换的基本思想是将图像空间中的点映射到参数空间中的曲线,从而通过在参数空间中寻找累积和最高的点来确定几何形状的参数。对于直线检测,将直线表示为参数空间中的点,其中每个点对应于一组可能的直线参数 (ρ, θ)。
1.2 Hough变换的特点
- 鲁棒性 :即便图像中有部分遮挡或噪声,Hough变换仍然能够准确地检测到几何形状。
- 适应性 :通过变换参数空间,可以检测各种复杂度的几何形状。
- 通用性 :Hough变换不仅限于直线检测,还可以用于检测圆、椭圆、矩形等其他形状。
Hough变换在工业视觉检测、医学图像分析、安全监控等众多领域中有着广泛的应用。掌握其基础原理和应用方法,对于深入理解图像处理和模式识别技术至关重要。接下来的章节将深入探讨Hough变换在实际开发中的应用以及优化策略。
2. OpenCV库介绍
2.1 OpenCV库概述
2.1.1 OpenCV的主要功能和特点
OpenCV是一个开源的计算机视觉和机器学习软件库,它提供了一系列的编程接口,用于解决复杂的视觉应用问题。主要功能涵盖了图像处理、视频分析、特征提取、物体识别等领域。OpenCV的特点包括:
- 跨平台性:OpenCV支持多种操作系统,如Windows、Linux、Mac OS等。
- 高效性:通过优化代码,OpenCV在图像处理任务中表现得非常高效。
- 丰富算法:提供了成千上万种算法,用于图像处理、模式识别、机器学习等。
- 社区支持:拥有庞大的用户和开发者社区,不断有人贡献新的代码和功能。
2.1.2 OpenCV库的发展历程
OpenCV的发展起始于1999年,由英特尔公司发起,目的是促进计算机视觉研究和商业应用的发展。从最初的1.0版本至今,OpenCV已经演进了多个版本,每次更新都带来了功能的增加与性能的提升。
2.2 OpenCV在图像处理中的应用
2.2.1 常见的图像处理算法和接口
OpenCV提供了许多图像处理的算法和接口,其中一些常见的包括:
- 灰度转换
- 颜色空间转换
- 滤波操作(如模糊、中值滤波等)
- 边缘检测(如Sobel算子、Canny算子等)
- 形态学操作(如膨胀、腐蚀等)
2.2.2 OpenCV在复杂项目中的应用案例
OpenCV被广泛应用于多个领域,包括但不限于:
- 人脸识别系统:用于安全验证,如手机解锁、门禁系统等。
- 医疗成像:帮助医生分析图像数据,进行疾病诊断。
- 自动驾驶汽车:用于识别道路上的标志和行人。
- 机器人视觉:机器人的导航和环境感知。
2.3 OpenCV环境搭建
2.3.1 安装OpenCV库的步骤和方法
安装OpenCV的过程通常包含以下步骤:
- 下载OpenCV的预编译包或者从源代码编译。
- 设置环境变量以确保系统能找到OpenCV库。
- 在开发环境中配置OpenCV路径。
- 进行测试以验证安装是否成功。
2.3.2 OpenCV开发环境的配置指导
根据不同的操作系统和开发工具,配置方法会有所不同。在Visual Studio中配置OpenCV的步骤大致如下:
- 安装Visual Studio并创建一个新项目。
- 下载适合Visual Studio版本的OpenCV预编译包。
- 解压OpenCV到一个指定目录。
- 在Visual Studio中添加包含OpenCV头文件的目录到包含目录(Include Directories)。
- 添加OpenCV库文件到库目录(Library Directories)。
- 将OpenCV的.lib文件添加到项目的链接器输入(Linker -> Input -> Additional Dependencies)。
- 在项目中添加配置文件以支持动态链接库(DLLs)。
安装和配置OpenCV是使用它进行图像处理和开发的前提,确保这些步骤正确无误是至关重要的。下面是一个简化的示例,展示了如何在C++中使用OpenCV进行图像的读取和显示。
#include <opencv2/opencv.hpp>
#include <iostream>
int main() {
// 使用OpenCV的imread函数读取图像
cv::Mat image = cv::imread("path_to_image.jpg");
if(image.empty()) {
std::cout << "Could not open or find the image" << std::endl;
return -1;
}
// 使用imshow函数显示图像
cv::imshow("Display window", image);
// 等待键盘输入,参数为等待时间,0表示无限等待
cv::waitKey(0);
return 0;
}
在上述代码中,我们首先包含了OpenCV的头文件,然后在主函数中读取了一张图片,并使用imshow函数显示了它。如果图片无法被正确加载,程序会输出错误信息并退出。这个过程仅展示了如何使用OpenCV的最基本功能,但它是进行更高级图像处理和视觉任务的起点。
3. Visual C++环境配置
3.1 Visual C++开发环境介绍
3.1.1 Visual C++的主要功能和特点
Visual C++,作为微软Visual Studio家族中的重要一员,专为C++语言的开发提供强大的支持。它具备高级的代码编辑器、调试器以及性能分析器等工具,使得开发者能够进行高效的开发工作。Visual C++具有以下显著特点:
- 集成开发环境(IDE) :提供一个集中的工作空间,整合了源代码编辑、编译、调试等开发阶段所需的所有工具。
- 强大的调试工具 :支持本地和远程调试、性能分析等功能,帮助开发者快速定位和解决问题。
- 丰富的组件库 :支持MFC(Microsoft Foundation Classes)、ATL(Active Template Library)等,为应用程序的创建提供了丰富的预建组件。
- C++11/14/17/20支持 :紧跟最新的C++标准,使开发者能够使用最新的语言特性。
- 跨平台开发 :与Visual Studio一起支持跨平台开发,能够编译运行在Windows、Linux、甚至macOS等操作系统上。
3.1.2 Visual C++在Windows平台的应用优势
Visual C++在Windows平台上的开发优势尤为明显,因为它充分利用了Windows操作系统提供的底层服务和接口。这种紧密的集成意味着:
- 系统级访问 :开发者可以直接使用Windows API进行系统级编程,构建高性能的应用程序和服务。
- 用户界面(UI)设计 :集成的工具和设计器简化了基于Windows的桌面应用程序的UI设计流程。
- 硬件交互 :能够更直接地与硬件交互,使得驱动程序和其他硬件相关软件的开发更加高效。
- 安全性和稳定性 :通过Visual C++开发的应用程序能够利用Windows的安全机制,保证应用的安全性和稳定性。
3.2 Visual C++环境搭建
3.2.1 安装Visual Studio的步骤
在Windows平台上安装Visual Studio的步骤是创建Visual C++开发环境的首要步骤。下面是详细的操作步骤:
- 访问Visual Studio官方网站下载安装程序。
- 运行下载的安装程序,启动Visual Studio安装向导。
- 在安装向导中选择“安装”选项,并选择需要安装的组件。
- 选择“C++桌面开发”工作负载以及需要的C++库和工具集。
- 按照提示完成安装向导,等待安装过程完成。
- 重启计算机,完成安装过程。
3.2.2 创建和配置Visual C++项目的方法
安装好Visual Studio之后,接下来是创建和配置Visual C++项目的具体步骤:
- 打开Visual Studio,选择“创建新项目”。
- 在“创建新项目”窗口中,选择合适的项目模板。例如,对于控制台应用程序,选择“Windows控制台应用程序”。
- 输入项目名称,选择项目保存位置,点击“创建”按钮。
- 在创建向导中,可以根据需要选择不同的配置选项(如Debug或Release)以及目标平台(如x86或x64)。
- 创建项目后,可以在解决方案资源管理器中看到项目的文件结构。
- 可以通过右键点击项目中的“源文件”或“头文件”,添加新的C++源代码或头文件到项目中。
3.3 OpenCV与Visual C++的集成
3.3.1 集成OpenCV库到Visual C++项目
在Visual C++中集成OpenCV库,使得可以在项目中使用OpenCV进行图像处理和其他计算机视觉任务。下面是具体的集成步骤:
- 下载并安装OpenCV库。可以在OpenCV官网下载预编译的库文件或从源代码编译安装。
- 将OpenCV的库文件(
.lib)和头文件(.h)复制到Visual Studio的项目目录中。 - 打开项目属性,导航到“配置属性” -> “C/C++” -> “常规”,在“附加包含目录”中添加包含OpenCV头文件的目录。
- 在“链接器” -> “常规” -> “附加库目录”中添加包含OpenCV库文件的目录。
- 在“链接器” -> “输入” -> “附加依赖项”中添加OpenCV库文件的名称(如
opencv_world456.lib)。 - 点击“确定”保存设置。
3.3.2 验证OpenCV在Visual C++中安装和配置成功
为了验证OpenCV是否已经在Visual C++项目中正确配置,可以创建一个简单的OpenCV应用程序,执行以下操作:
- 创建一个新的Visual C++项目,按照前面介绍的步骤。
- 在源文件中添加OpenCV库的使用代码,例如:使用
cv::Mat类来创建一个矩阵对象。 - 编译并运行项目。如果配置正确,应用程序将成功运行并执行OpenCV相关代码。
- 如果遇到链接错误,请检查库文件和头文件路径是否设置正确,或重新下载和安装OpenCV库。
通过以上步骤,可以确保OpenCV库与Visual C++项目成功集成,并可以在项目中使用OpenCV提供的功能。
4. 图像处理技术的实践操作
4.1 图像的加载与灰度化处理
使用OpenCV加载图像的方法
图像处理的第一步通常是加载图像文件到内存中。OpenCV库提供了简单易用的接口,用于加载和读取各种图像格式。使用 cv2.imread() 函数可以轻松实现这一过程。以下是该函数的基本使用方法:
import cv2
# 以彩色模式加载图像
image = cv2.imread('path_to_image.jpg', cv2.IMREAD_COLOR)
# 以灰度模式加载图像
image_gray = cv2.imread('path_to_image.jpg', cv2.IMREAD_GRAYSCALE)
在上述代码中, cv2.imread() 函数的第一个参数是图像的路径,第二个参数是标志位,可以是 cv2.IMREAD_COLOR (默认值,以彩色模式加载图像,忽略图像的透明度),或者是 cv2.IMREAD_GRAYSCALE (以灰度模式加载图像)。
图像灰度化的原理和操作步骤
图像灰度化是将彩色图像转换为灰度图像的过程。灰度图像是指每个像素只有一个亮度值的图像,通常用于简化图像处理和分析。在OpenCV中,可以使用 cv2.cvtColor() 函数结合 cv2.COLOR_BGR2GRAY 参数来实现这一转换。
import cv2
# 以彩色模式加载图像
image = cv2.imread('path_to_image.jpg', cv2.IMREAD_COLOR)
# 将彩色图像转换为灰度图像
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
灰度化的过程可以看作是将彩色图像的RGB通道进行加权平均的过程,其中加权的权重取决于人类视觉系统对不同颜色的敏感程度。常用的加权公式为:
Y = 0.299 * R + 0.587 * G + 0.114 * B
其中,Y代表灰度值,R、G、B分别代表红色、绿色和蓝色通道的值。
4.2 边缘检测技术应用
Canny边缘检测算法原理
边缘检测是图像处理中的一个重要步骤,其目的是识别图像中物体的边缘。Canny边缘检测算法是一种非常流行的边缘检测算法,由John Canny于1986年提出。该算法利用高斯滤波器平滑图像,寻找局部最大梯度,最终通过滞后阈值确定边缘。
Canny算法的主要步骤包括:
1. 噪声抑制 :使用高斯滤波器去除图像噪声。
2. 梯度计算 :计算图像梯度的幅值和方向。
3. 非极大值抑制 :保留梯度的局部最大值。
4. 滞后阈值 :通过两个阈值来确定边缘的强弱,只保留强边缘,并用它们来连接相邻的弱边缘。
实现Canny算法的代码操作流程
在OpenCV中实现Canny算法相对简单。下面的代码展示了如何使用OpenCV的 cv2.Canny() 函数进行边缘检测:
import cv2
# 以灰度模式加载图像
image_gray = cv2.imread('path_to_image.jpg', cv2.IMREAD_GRAYSCALE)
# 应用Canny边缘检测算法
edges = cv2.Canny(image_gray, threshold1, threshold2)
在这段代码中, threshold1 和 threshold2 是滞后阈值,需要根据实际图像进行调整。通常, threshold1 的值应该小于 threshold2 。
4.3 Hough线段检测的实现
Hough变换检测线段的算法原理
Hough变换是一种用于检测图像中特定形状(如直线、圆等)的算法。在检测直线的场景下,Hough变换利用参数空间来表达图像空间中的直线。每条直线可以由两个参数ρ(rho)和θ(theta)来表示,其中ρ是原点到直线的距离,θ是直线法线与x轴的夹角。
Hough变换的步骤包括:
1. 边缘图像 :首先需要一个边缘图像,通常由Canny边缘检测得到。
2. 累加器空间 :创建一个累加器矩阵,用于记录每条线的支持度。
3. 投票过程 :遍历边缘图像中的每个像素点,根据ρ和θ的可能值,更新累加器矩阵。
4. 寻找峰值 :确定累加器矩阵中的局部最大值,这些峰值对应的ρ和θ定义了图像中的直线。
在OpenCV中实现Hough线段检测的代码示例
下面的代码展示了如何在OpenCV中使用 cv2.HoughLines() 函数进行Hough线段检测:
import cv2
import numpy as np
# 以灰度模式加载图像
image_gray = cv2.imread('path_to_image.jpg', cv2.IMREAD_GRAYSCALE)
# 应用Canny边缘检测算法
edges = cv2.Canny(image_gray, threshold1, threshold2)
# 应用Hough变换检测线段
lines = cv2.HoughLines(edges, rho, theta, threshold)
在这段代码中, rho 是距离分辨率, theta 是角度分辨率, threshold 是检测到的线段与阈值的最小交点数。这些参数需要根据具体图像和需求进行调整。
现在,让我们更详细地了解Hough变换的具体工作原理,以及如何利用OpenCV的函数来实现它,并通过代码和图像来展示检测到的线段。
5. Hough线段检测结果展示与代码优化
5.1 结果的绘制与展示
在完成Hough线段检测后,我们通常需要将检测到的线段绘制到原图上以直观展示结果。在OpenCV中,使用函数 cv::line 来绘制线段。为了展示的清晰,我们可能需要调整线段的颜色、厚度以及是否去除重复线段等。
// 假设已经检测到的线段存储在lines中
for (size_t i = 0; i < lines.size(); i++)
{
float rho = lines[i][0], theta = lines[i][1];
Point pt1, pt2;
double a = cos(theta), b = sin(theta);
double x0 = a * rho, y0 = b * rho;
pt1.x = cvRound(x0 + 1000 * (-b));
pt1.y = cvRound(y0 + 1000 * (a));
pt2.x = cvRound(x0 - 1000 * (-b));
pt2.y = cvRound(y0 - 1000 * (a));
line(image, pt1, pt2, Scalar(0,0,255), 3, LINE_AA);
}
上述代码中, lines 是通过 cv::HoughLinesP 函数获取的线段集合。通过计算每个线段的起点和终点坐标,我们可以使用 line 函数在原图 image 上绘制出来。 Scalar(0,0,255) 表示红色线条, 3 是线条的厚度, LINE_AA 是抗锯齿线。
提高结果可视化的几种方法
可视化是数据科学的重要一环,尤其是在图像处理中,良好的可视化可以帮助我们更好地理解数据或结果。以下是一些提高可视化效果的方法:
- 对比度调整 :在绘制线段之前,可以增强图像的对比度来提高线段的可见度。
- 去除重复线段 :为了避免检测到的线段过于密集,我们可以对检测结果进行后处理,例如合并那些非常接近的线段。
- 使用不同颜色或样式 :根据线段的长度、角度或其他特征来为不同的线段分配不同的颜色或样式。
5.2 代码的解读与调整参数的建议
Hough变换代码逻辑的详细解读
Hough变换的代码实现涉及到多个步骤,包括图像的预处理、线段检测和结果展示。下面是对 cv::HoughLinesP 函数的基本解读:
vector<Vec4i> lines; // 存储线段的向量
// 检测图像中的线段
cv::HoughLinesP(image, lines, 1, CV_PI/180, minLineLength, maxLineGap);
lines是输出参数,存储检测到的线段。- 第二个参数是输入图像。
- 第三个参数是距离分辨率,单位是像素。
- 第四个参数是角度分辨率,单位是弧度。
minLineLength是线段的最小长度,小于此值的线段会被过滤掉。maxLineGap是同一方向上相邻两点之间的最大间隔,超过此值的点将不会被认为是线段的一部分。
如何根据实际需求调整检测参数
在进行Hough线段检测时,调整参数以适应不同的需求是非常重要的。以下是一些建议:
- 调整距离分辨率(rho) :分辨率越高,检测结果越精细,但计算量也会随之增大。
- 调整角度分辨率(theta) :角度分辨率越低,检测结果对斜率变化越敏感。
- 设置合理的
minLineLength和maxLineGap:这取决于你想要检测的线段特征。如果要检测长的直线,可以增加minLineLength;如果要检测的是图像中的断线或短的线段,应减少minLineLength并增加maxLineGap。
通过适当的参数调整,我们可以使Hough变换的线段检测更适应于我们的应用场景,例如交通标志检测、笔画提取等。
需要注意的是,参数调整需要结合具体应用场景进行测试和评估,过高的参数设置会增加计算时间,而过低则可能丢失重要特征。
简介:本文深入探讨了如何使用OpenCV库和Visual C++(VC)实现Hough变换来检测图像中的线段。介绍了Hough变换的理论基础、实现步骤,并提供了完整的代码示例。通过这些步骤,读者可以学习到从图像加载到边缘检测,再到Hough变换和结果展示的整个流程,并能够根据实际需求调整关键参数。Hough变换是计算机视觉领域图像处理的一个重要组成部分,本教程将帮助读者深入理解并应用这一技术。

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 20
20 0
0- 0



 已为社区贡献16条内容
已为社区贡献16条内容

所有评论(0)