ABB机器人离线仿真工作站:开启机器人编程新世界
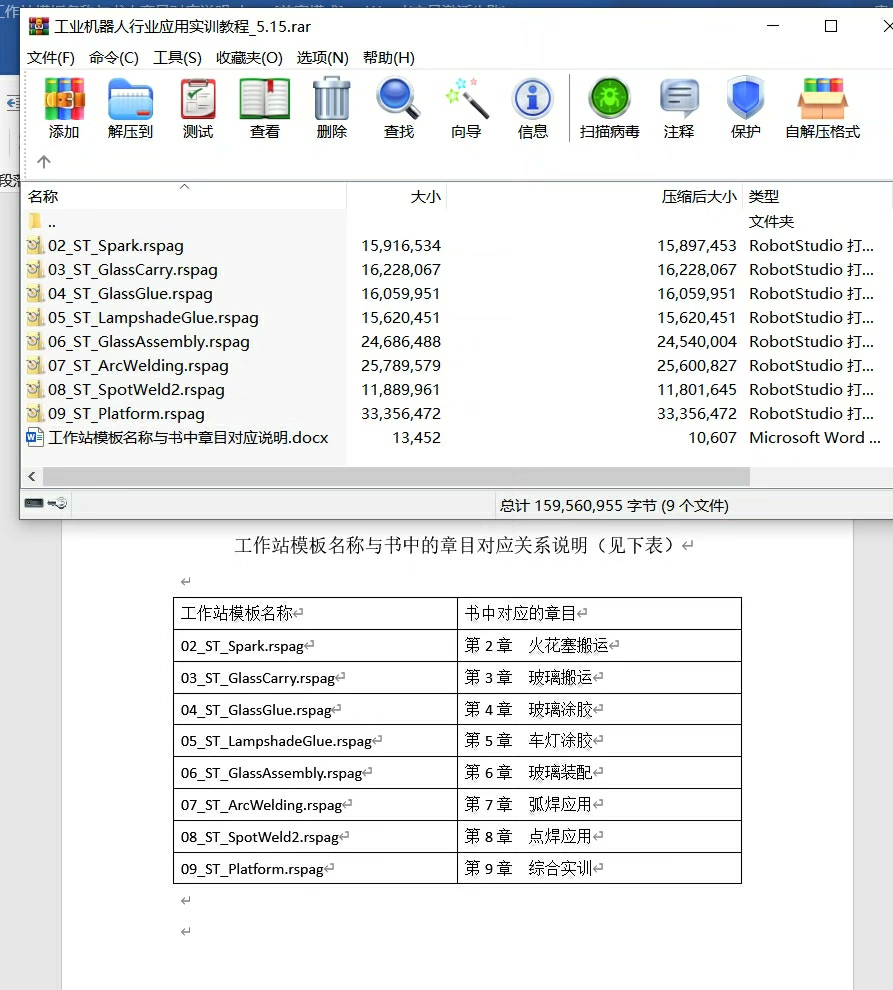
ABB机器人离线仿真工作站各种工作站仿真都有abb机器人搬运,各种码垛,机床上下料,涂胶,点焊,弧焊,机器人写字绘画等都有送仿真编程robotstudio_6.08版本,永久使用本人自己制作/整理的工作站仿真,带全套还有几套的程序模板和注释,每条程序都注释的清清楚楚非常完整全面,适合学习借鉴使用,带你快速入门abb机器人还有各种手册资料等,几十套文档资料,官方的全套手册等都有,编程仿真软件也有,永
ABB机器人离线仿真工作站 各种工作站仿真都有 abb机器人搬运,各种码垛,机床上下料,涂胶,点焊,弧焊,机器人写字绘画等都有 送仿真编程robotstudio_6.08版本,永久使用 本人自己制作/整理的工作站仿真,带全套还有几套的程序模板和注释,每条程序都注释的清清楚楚非常完整全面,适合学习借鉴使用,带你快速入门abb机器人 还有各种手册资料等,几十套文档资料,官方的全套手册等都有,编程仿真软件也有,永久使用
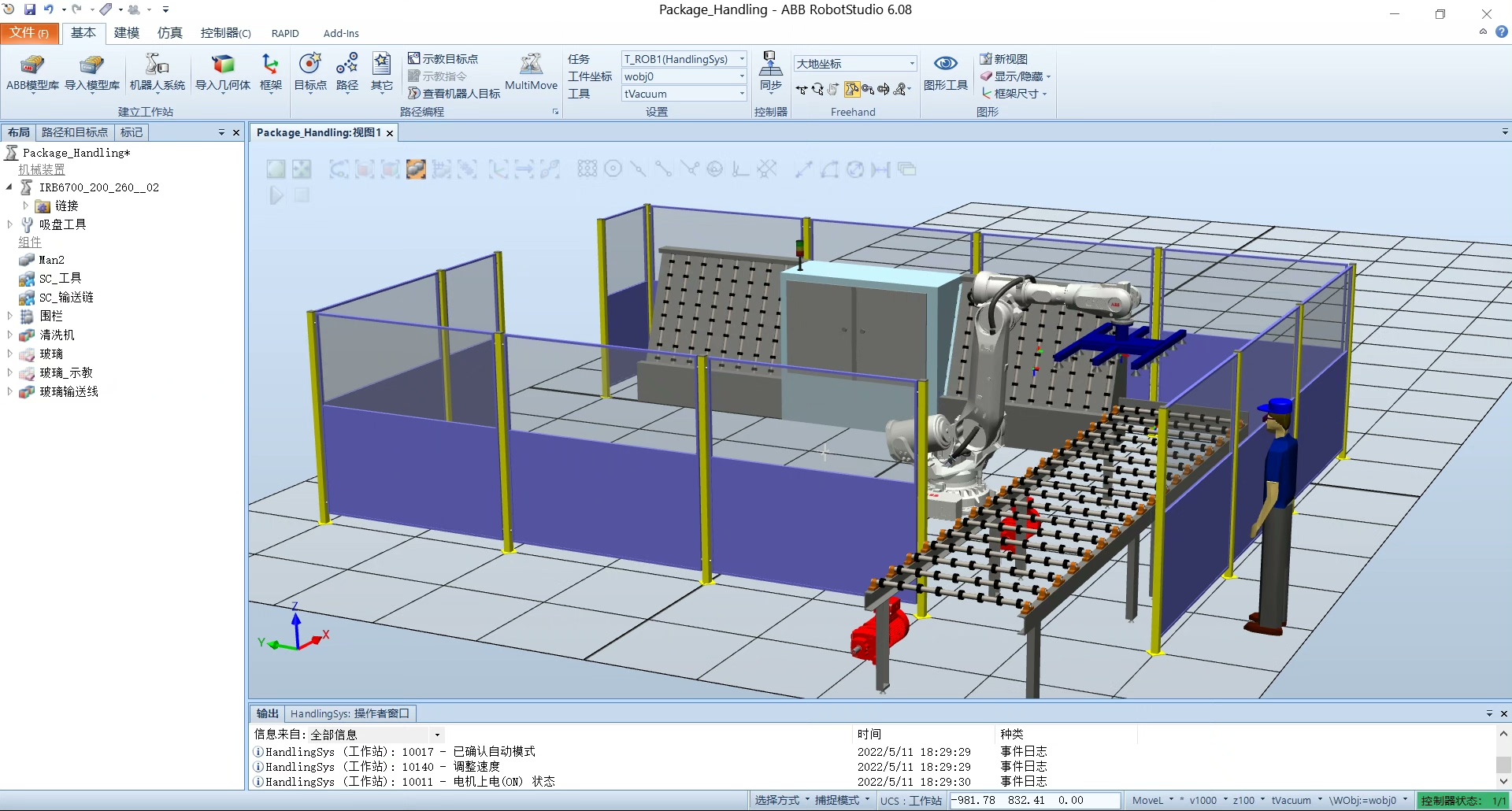
最近在研究ABB机器人相关的内容,发现了一个超棒的资源——ABB机器人离线仿真工作站,必须来和大家分享分享。
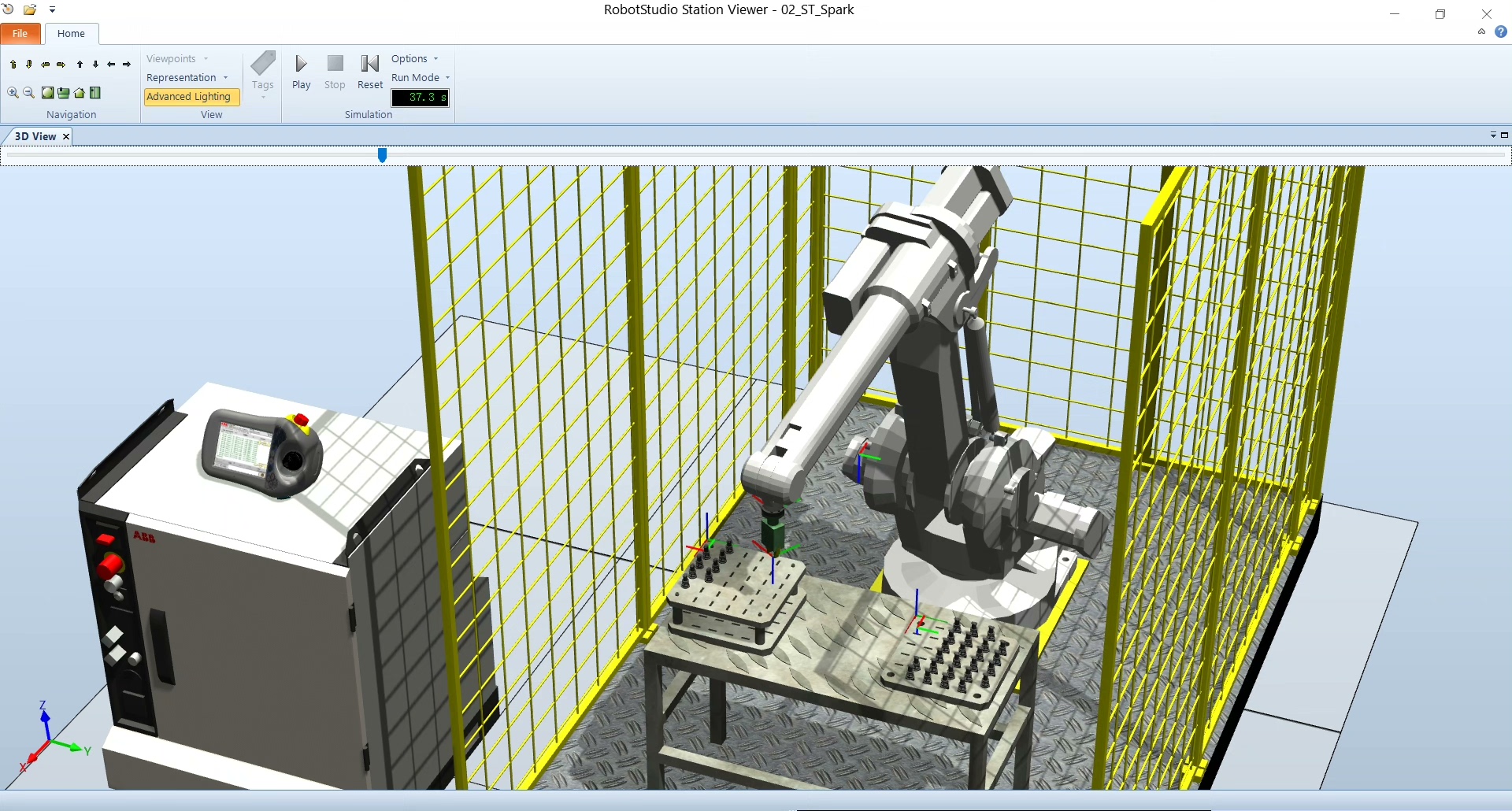
这个工作站涵盖的仿真类型那叫一个丰富,各种工作站仿真应有尽有。不管你是对机器人搬运、码垛感兴趣,还是想了解机床上下料、涂胶、点焊、弧焊,甚至是机器人写字绘画这类有趣的应用,这里都能满足你。
丰富应用案例及代码示例
比如说在机器人搬运任务中,我们可以通过下面这样一段简单的RAPID代码实现基本的搬运逻辑:
MODULE Module1
CONST robtarget PickPoint := [ [100,100,100],[1,0,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09] ];
CONST robtarget PlacePoint := [ [200,200,100],[1,0,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09] ];
PROC main()
MoveJ PickPoint,v1000,z10,Tool1\WObj:=WObj1;
// 移动到抓取点,速度1000mm/s,转弯区数据z10,使用工具Tool1,工件坐标系WObj1
GripperOpen();
// 打开夹具
MoveL PickPoint,v500,fine,Tool1\WObj:=WObj1;
// 以线性方式精确移动到抓取点,速度500mm/s
GripperClose();
// 关闭夹具
MoveL PlacePoint,v500,fine,Tool1\WObj:=WObj1;
// 线性移动到放置点
GripperOpen();
// 打开夹具放置物品
MoveJ Home,v1000,z10,Tool1\WObj:=WObj1;
// 回到初始位置
ENDPROC
ENDMODULE代码分析:这段代码首先定义了抓取点PickPoint和放置点PlacePoint。在main程序中,先通过MoveJ指令以关节运动方式快速移动到抓取点附近,然后打开夹具,再以线性运动MoveL精确到达抓取点并关闭夹具抓取物品。接着线性移动到放置点,打开夹具放下物品,最后关节运动回到初始位置。
在弧焊任务里,又会是另一番场景。比如像这样:
MODULE Module2
CONST welddef MyWeld := [ [100,100,100],[1,0,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09],100,200,20,5 ];
// 定义焊接参数,包括位置、速度、电流等
PROC main()
ArcL StartPoint,MyWeld,Tool1\WObj:=WObj1;
// 以弧焊线性运动方式开始焊接,从起始点StartPoint
ArcL EndPoint,MyWeld,Tool1\WObj:=WObj1;
// 继续弧焊到终点EndPoint
ArcStop();
// 停止弧焊
ENDPROC
ENDMODULE这里定义了焊接参数MyWeld,通过ArcL指令控制机器人沿着指定路径进行弧焊操作,从起始点到终点,最后使用ArcStop停止焊接。
超贴心的学习资源
更赞的是,这个资源还送仿真编程软件robotstudio_6.08版本,而且是永久使用。这对于想深入学习ABB机器人编程的朋友来说,简直是福音。毕竟正版软件的购买成本可不低,现在能免费永久使用,能省不少钱呢。
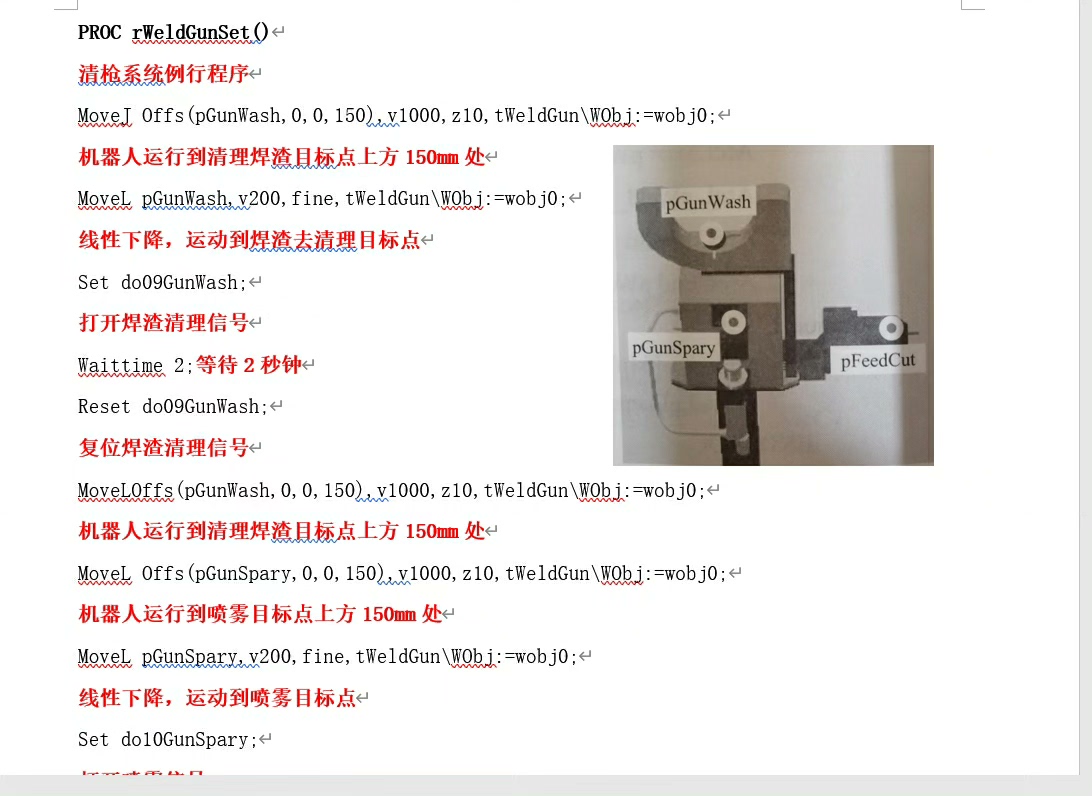
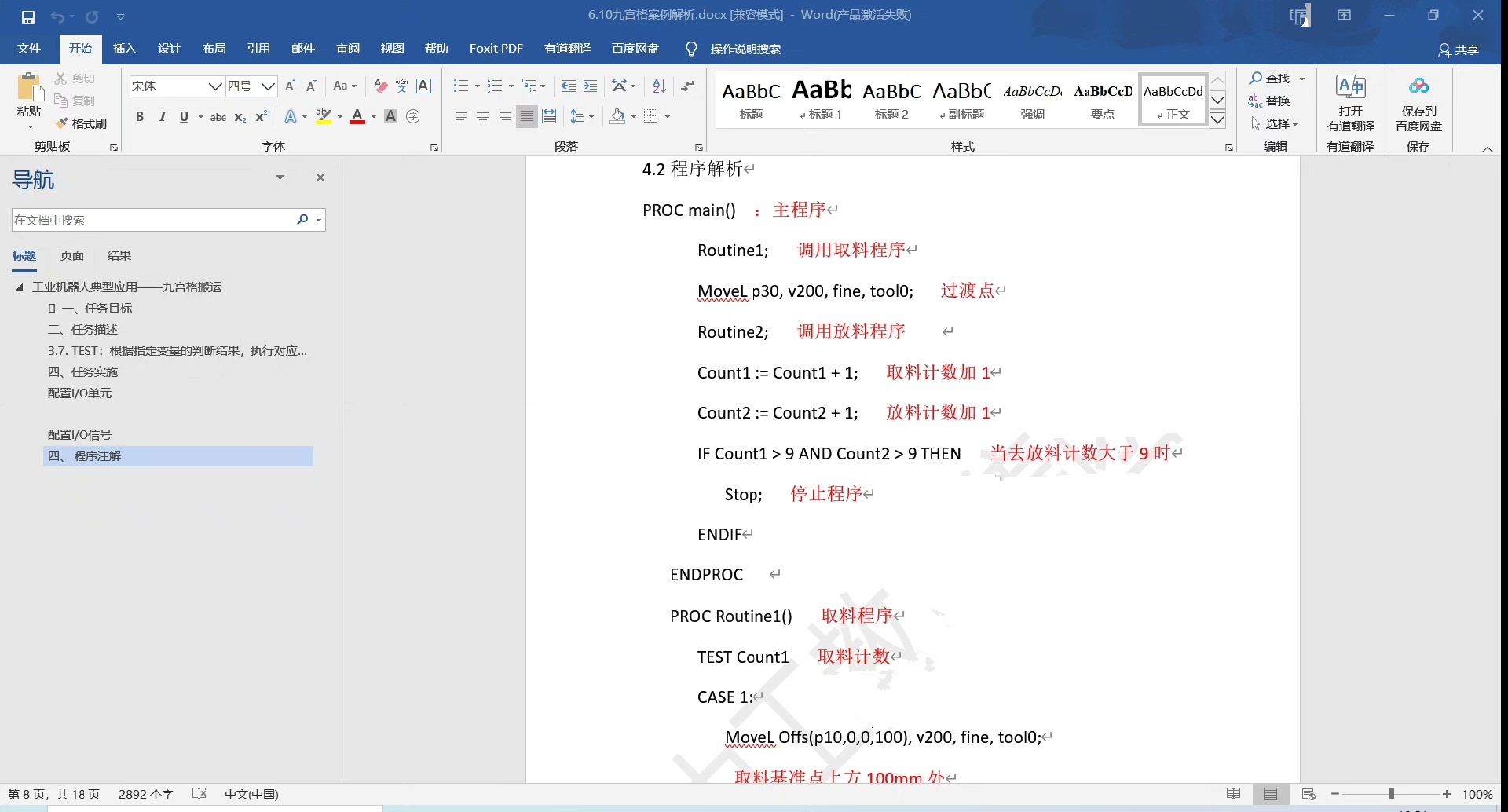
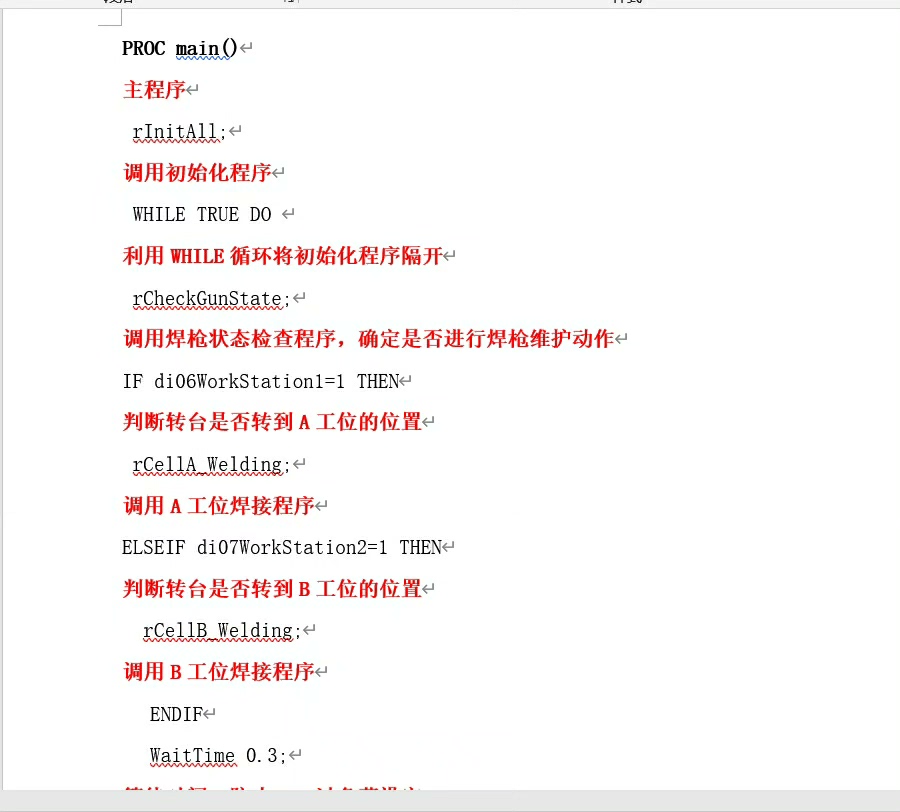
这些工作站仿真都是博主自己精心制作和整理的,不仅带全套程序,还有几套程序模板并且每条程序都有清清楚楚、全面完整的注释。对于初学者而言,这就像有个贴心的老师在旁边指导,能带你快速入门ABB机器人编程。比如说在学习机器人码垛程序时,看着那些详细的注释,就能轻松理解每一步的作用,知道为什么要这么写代码,大大降低了学习难度。
除此之外,还有几十套文档资料,官方的全套手册都包含在内。这些资料就像一座知识宝库,无论是在编程过程中遇到难题,还是想要深入了解机器人的原理、功能,都能从里面找到答案。
总之,这个ABB机器人离线仿真工作站,无论是学习资源的丰富度,还是对初学者的友好程度,都堪称一流。如果你也对ABB机器人编程感兴趣,不妨试试这个资源,相信会给你带来意想不到的收获。

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 12
12 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)