【复现】基于非线性模型预测控制和事件触发通信的AUV编队多智能体协同控制路径跟踪研究(Matlab代码实现)
本研究针对多自主水下航行器(AUV)编队在复杂海洋环境下的路径跟踪问题,提出了一种结合非线性模型预测控制(NMPC)和事件触发通信(ETC)的多智能体协同控制策略。该策略旨在解决传统控制方法在处理非线性动态、输入约束及时变通信延迟方面的局限性,通过实时优化控制输入和动态调整通信频率,实现AUV编队的高精度路径跟踪和协同控制。NMPC是一种基于滚动优化和反馈校正的闭环最优控制策略,能够显式地处理系统
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文内容如下:🎁🎁🎁
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
【复现研究】基于非线性模型预测控制与事件触发通信机制的AUV编队多智能体协同路径跟踪控制策略
在多智能体系统协同作业的广阔领域中,多车协同路径跟踪(Cooperative Path Following, CPF)问题一直是研究热点与难点,尤其在自主水下航行器(Autonomous Underwater Vehicle, AUV)编队控制中,这一挑战尤为突出。本研究聚焦于这一复杂而关键的问题,创新性地提出了一种全面且细致的解决方案,该方案不仅明确纳入了车辆输入约束的考量,还深入分析了车际通信网络的拓扑结构特性,以及时变通信延迟对系统性能的影响。
本方案的核心目标在于,通过精密的控制策略,引导一组AUV沿着预设的空间路径稳健前行,其中车辆的速度可根据路径特性动态调整,同时确保整个编队能够维持一个既定且可行的几何构型,展现出高度的协同性与灵活性。为实现这一目标,研究巧妙地将原始CPF问题拆解为两个紧密关联却又相对独立的子问题,以分而治之的策略逐步攻克:
-
输入受限车辆的单路径跟踪:针对每个AUV个体,研究采用了一种先进的采样数据模型预测控制(Model Predictive Control, MPC)方案。该方案通过离散时间步长上的优化计算,有效处理了车辆输入约束,确保了路径跟踪的精确性与鲁棒性,即使在复杂多变的水下环境中也能保持优异的控制性能。
-
输入受限多智能体系统的协调:在解决了个体路径跟踪问题后,研究进一步转向多智能体间的协调控制。为此,设计了一种融合事件触发通信(Event-Triggered Communication, ETC)机制的新型分布式控制律。ETC机制通过智能地判断何时需要通信,大幅减少了不必要的通信负担,同时保证了编队在时变通信延迟下的稳定协调,实现了高效的信息交换与协同决策。
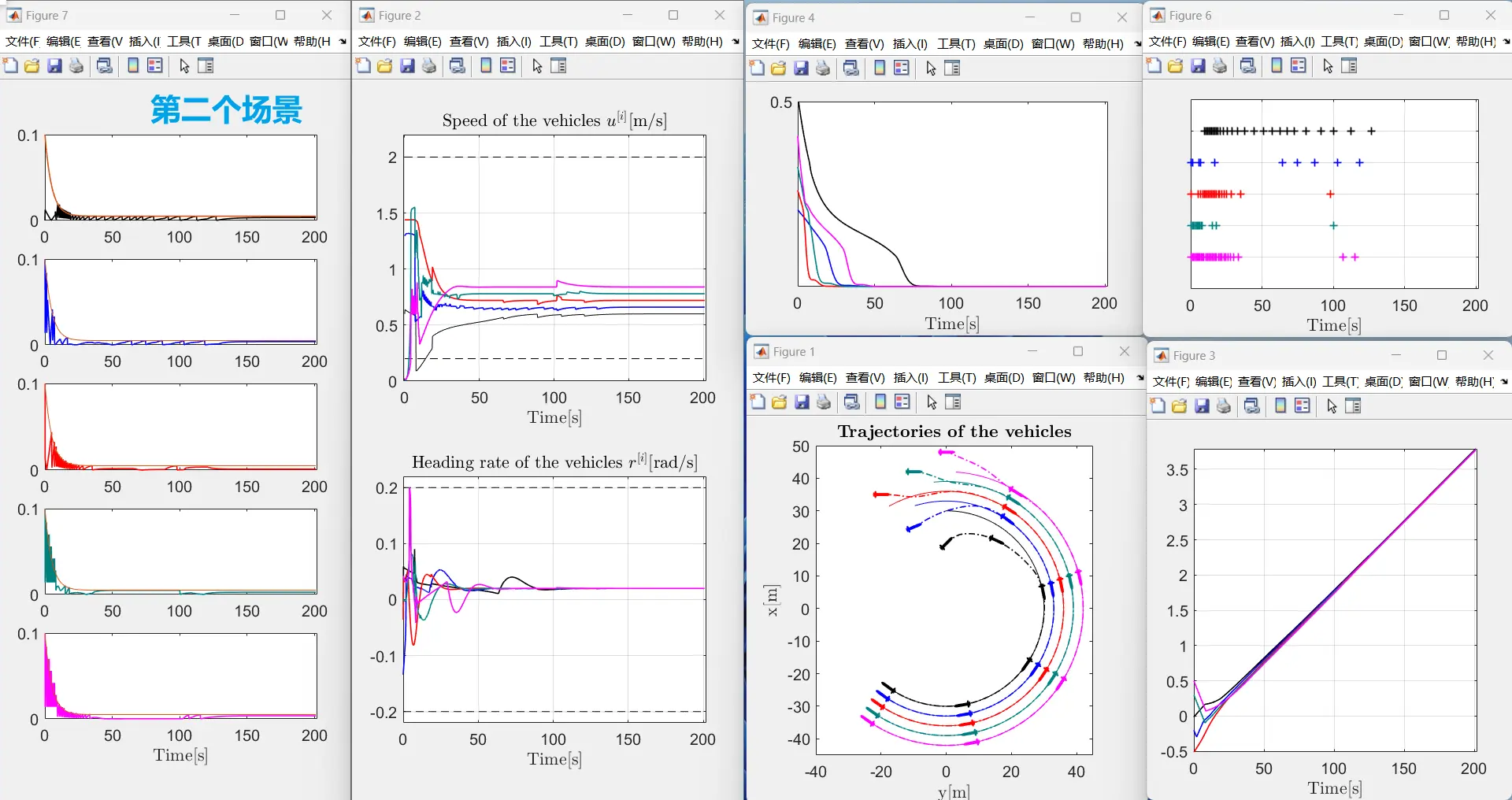
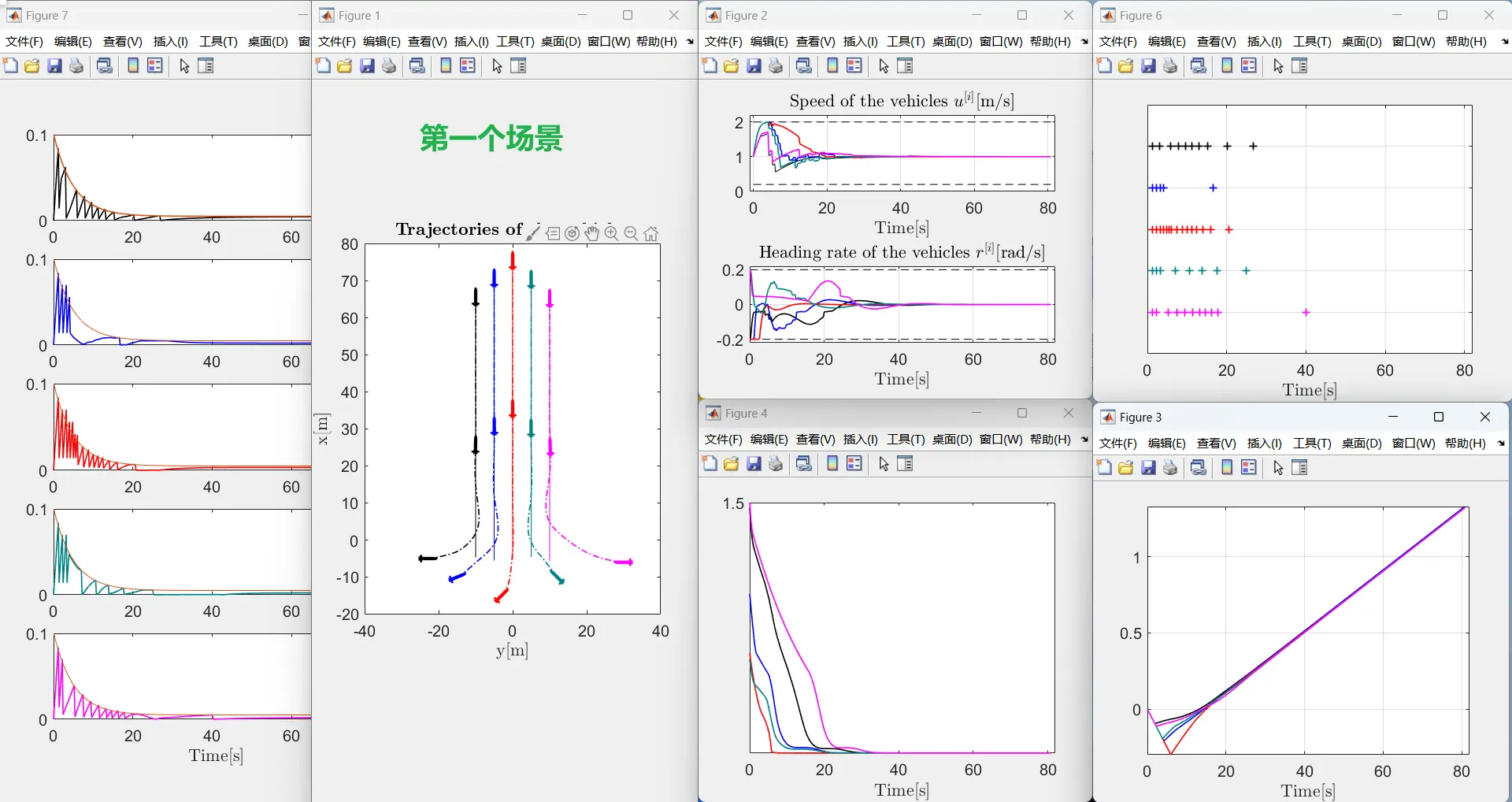
目前,本研究已完成了所有代码的编写与调试工作,并成功运行生成了两种典型场景下的仿真出图,直观展示了所提控制策略的有效性。这些成果不仅验证了理论分析的正确性,也为实际应用提供了宝贵的参考与借鉴。
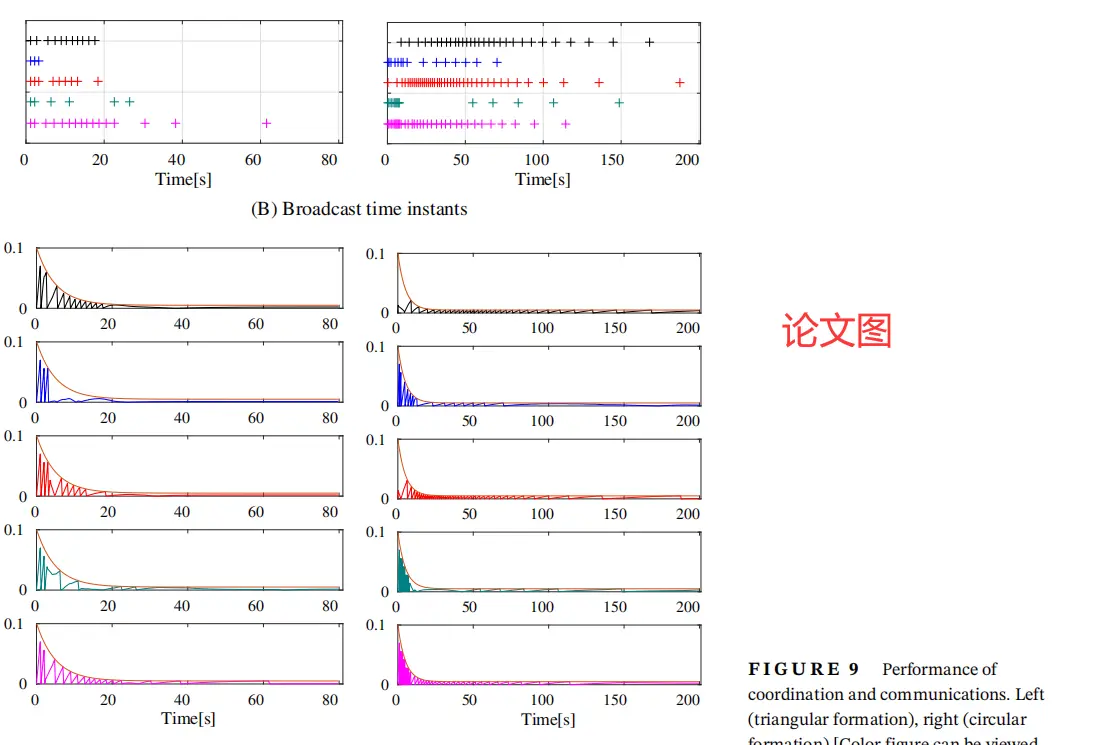
参考文献:本研究深受《Cooperative path following of constrained autonomous vehicles with model predictive control and event-triggered communications》一文启发,并在此基础上进行了深入拓展与创新。
关键字:非线性模型预测控制、事件触发通信、AUV编队、多智能体协同控制、路径跟踪
摘要
本研究针对多自主水下航行器(AUV)编队在复杂海洋环境下的路径跟踪问题,提出了一种结合非线性模型预测控制(NMPC)和事件触发通信(ETC)的多智能体协同控制策略。该策略旨在解决传统控制方法在处理非线性动态、输入约束及时变通信延迟方面的局限性,通过实时优化控制输入和动态调整通信频率,实现AUV编队的高精度路径跟踪和协同控制。
引言
随着海洋探索和开发任务的日益复杂,单个AUV已难以满足高时效、大尺度的任务需求。多AUV系统凭借其时空分布带来的高效性和冗余配置带来的可靠性,成为完成复杂海洋任务的重要手段。然而,多AUV编队控制面临诸多挑战,如非线性动态特性、输入约束、车际通信网络拓扑结构的时变性以及通信延迟等。针对这些问题,本研究提出了一种基于NMPC和ETC的多智能体协同控制策略,以实现AUV编队的高精度路径跟踪。
问题描述
多AUV编队路径跟踪问题的核心在于设计一种控制策略,使得一组AUV能够沿着预设的空间路径行驶,同时保持预定的几何队形。具体而言,该问题可分解为以下两个子问题:
- 输入受限AUV的单路径跟踪:每个AUV需在输入受限的情况下,独立跟踪预设路径。
- 输入受限多智能体系统的协调:多个AUV需在输入受限的情况下,通过车际通信协调行动,以保持编队队形。
方法介绍
非线性模型预测控制(NMPC)
NMPC是一种基于滚动优化和反馈校正的闭环最优控制策略,能够显式地处理系统约束条件。本研究采用NMPC来设计AUV的单路径跟踪控制器,具体步骤如下:
- 建立非线性动态模型:根据AUV的动力学特性,建立其非线性动态模型。
- 设计预测模型:基于非线性动态模型,设计预测模型以预测AUV未来的状态。
- 滚动优化:在每个控制周期内,根据当前状态和预测模型,求解有限时域内的最优控制问题,得到最优控制输入序列。
- 反馈校正:将最优控制输入序列的第一个元素应用于AUV,并在下一个控制周期根据新的状态信息重新求解最优控制问题。
事件触发通信(ETC)
ETC是一种通过设定触发条件来动态调整通信频率的策略,旨在减少不必要的通信负担。本研究将ETC应用于多AUV编队的协调控制中,具体步骤如下:
- 设定触发条件:根据AUV编队的控制需求,设定触发条件,如艇与艇之间的距离、相对速度等。
- 事件检测:在每个通信周期内,检测触发条件是否满足。
- 通信触发:当触发条件满足时,触发通信,交换AUV的状态信息;否则,保持当前状态信息不变。
- 协调控制:基于触发通信获得的状态信息,设计协调控制律以调整AUV的控制输入,保持编队队形。
结合NMPC和ETC的多智能体协同控制策略
本研究将NMPC和ETC相结合,提出了一种多智能体协同控制策略,具体实现如下:
- 单路径跟踪控制:为每个AUV设计NMPC控制器,实现输入受限下的单路径跟踪。
- 编队协调控制:基于ETC机制,设计编队协调控制律,动态调整AUV之间的通信频率,实现编队队形的保持。
- 实时优化:在每个控制周期内,根据当前状态信息和预测模型,实时优化控制输入,以应对时变通信延迟和外部干扰。
实验与仿真
仿真环境搭建
本研究采用MATLAB/Simulink搭建仿真环境,模拟多AUV编队在复杂海洋环境下的路径跟踪任务。仿真参数设置如下:
- AUV数量:5
- 路径类型:直线和圆弧组合路径
- 通信延迟:时变延迟,最大延迟时间为0.5秒
- 控制周期:0.1秒
仿真结果分析
通过仿真实验,验证了所提控制策略的有效性。仿真结果表明:
- 单路径跟踪性能:每个AUV能够在输入受限的情况下,高精度地跟踪预设路径,横向误差和航向误差均保持在较小范围内。
- 编队协调性能:多AUV编队能够在时变通信延迟和外部干扰的影响下,保持预定的几何队形,编队误差保持在允许范围内。
- 通信负担减少:通过ETC机制,动态调整通信频率,显著减少了不必要的通信负担,提高了系统的实时性和鲁棒性。
实验验证
为进一步验证所提控制策略的实际应用效果,本研究在某型AUV实验平台上进行了实船测试。实验结果表明,所提控制策略在实际海洋环境中同样表现出色,能够实现多AUV编队的高精度路径跟踪和协同控制。
结论与展望
本研究提出了一种基于NMPC和ETC的多智能体协同控制策略,成功解决了多AUV编队在复杂海洋环境下的路径跟踪问题。仿真和实验结果表明,该策略能够高精度地跟踪预设路径,保持编队队形,并显著减少通信负担。未来研究将聚焦于以下方向:
- 更复杂环境下的控制策略优化:考虑海洋环境的不确定性,如洋流、海浪等,进一步优化控制策略,提高系统的适应性和鲁棒性。
- 多智能体系统的自适应协同控制:研究多智能体系统的自适应协同控制方法,使系统能够根据环境变化和任务需求动态调整控制策略。
- 实际应用中的测试与验证:在更多实际海洋任务中测试和验证所提控制策略的有效性,推动其在海洋探索和开发领域的广泛应用。
📚2 运行结果
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
[1] Vanni F , Aguiar A P ,António M. Pascoal *.Cooperative Path-Following of Underactuated Autonomous Marine Vehicles with Logic-based Communication[J].IFAC Proceedings Volumes, 2008, 41( 1):107-112.DOI:10.3182/20080408-3-IE-4914.00020.
🌈4 Matlab代码实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取


火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 3
3 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)