基于VC++与OpenCV实现图像灰度直方图显示的完整项目
灰度直方图是图像中各灰度级像素频次的统计分布,横轴表示灰度级(0~255),纵轴表示该灰度级出现的像素数量。其数学表达为:其中 $ k $ 为灰度级,$ n_k $ 为图像中灰度值等于 $ k $ 的像素个数。通过直方图可直观判断图像整体亮度倾向——若峰值集中于左侧(低灰度),说明图像偏暗;集中在右侧则过亮;分布过窄则对比度不足。rectangle函数的基本调用格式如下:参数类型说明imgMat&

简介:灰度直方图是图像处理中的关键工具,用于直观展示图像中各灰度级像素的分布情况,在图像增强、对比度调整和分类等任务中具有重要作用。本文介绍如何在VC++环境下利用OpenCV库实现灰度直方图的计算与可视化,涵盖图像读取、灰度转换、直方图计算、归一化处理及图形绘制全过程。通过本项目实践,开发者可掌握C++平台下图像统计分析的基础方法,为深入学习计算机视觉打下坚实基础。 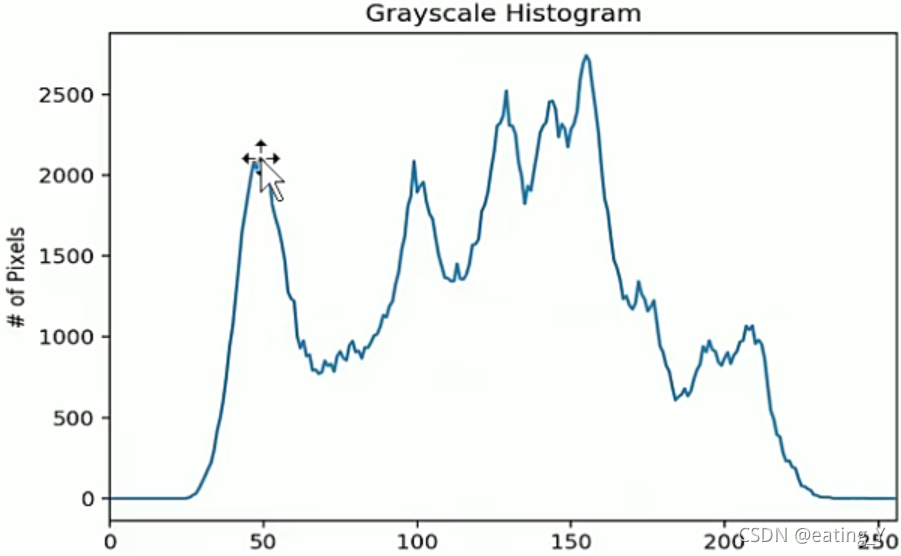
1. 灰度直方图基本概念与图像亮度分析
灰度直方图的定义与统计意义
灰度直方图是图像中各灰度级像素频次的统计分布,横轴表示灰度级(0~255),纵轴表示该灰度级出现的像素数量。其数学表达为:
$$ H(k) = n_k $$
其中 $ k $ 为灰度级,$ n_k $ 为图像中灰度值等于 $ k $ 的像素个数。通过直方图可直观判断图像整体亮度倾向——若峰值集中于左侧(低灰度),说明图像偏暗;集中在右侧则过亮;分布过窄则对比度不足。
直方图在图像质量评估中的应用
直方图作为图像增强的重要先验工具,广泛应用于自动曝光校正、对比度拉伸与阈值分割。例如,在Otsu算法中,利用直方图双峰特性自动选取最佳分割阈值。此外,结合累积分布函数(CDF)可实现直方图均衡化,提升图像视觉效果。
光照变化对直方图形态的影响规律
不同光照条件下,图像直方图呈现规律性偏移:弱光环境下直方图左移且动态范围压缩;强光下右移并可能产生高光饱和(峰值贴边)。通过分析这些特征,可建立从数据分布到视觉感知的映射模型,为后续图像处理提供决策依据。
2. OpenCV环境搭建与灰度图像读取转换
在现代计算机视觉系统开发中,OpenCV作为最广泛使用的开源图像处理库之一,为开发者提供了从底层图像采集到高层视觉分析的完整工具链。其跨平台特性、高效的算法实现以及对C++、Python等多种语言的良好支持,使其成为学术研究和工业应用中的首选框架。然而,在正式进入图像处理核心逻辑之前,正确配置开发环境并掌握基本图像加载与预处理方法是不可或缺的第一步。本章将深入讲解如何在VC++(Visual Studio)环境下完成OpenCV的集成,并系统性地介绍图像读取、数据结构解析及色彩空间转换的关键流程。通过本章内容,读者不仅能够独立完成开发环境的部署,还将理解图像数据在内存中的组织方式,为后续直方图计算等高级操作打下坚实基础。
2.1 OpenCV库在VC++环境下的配置与调用
在Windows平台上使用C++进行OpenCV开发,通常选择Visual Studio作为集成开发环境(IDE),因其强大的调试功能、智能提示和项目管理能力。而OpenCV官方提供了针对Windows系统的预编译库版本(如 opencv-4.x.x-vc14_vc15 ),极大简化了配置过程。但即便如此,手动配置仍涉及多个关键步骤,包括包含路径设置、库文件链接、动态链接库(DLL)部署等,任何一个环节出错都可能导致编译失败或运行时异常。
2.1.1 Visual Studio项目中OpenCV的静态/动态链接配置
OpenCV支持两种主要的链接方式: 静态链接 和 动态链接 。静态链接会将所有依赖的OpenCV代码直接嵌入可执行文件(.exe),生成体积较大但无需额外DLL即可运行的程序;而动态链接则在运行时加载外部的DLL文件,生成的EXE较小,但必须确保目标机器上存在对应版本的OpenCV DLL。
目前主流做法是采用 动态链接 ,原因如下:
- 编译速度快;
- 多个项目可共享同一组DLL;
- 易于更新OpenCV版本而不重新编译整个项目。
以Visual Studio 2022为例,配置动态链接的基本流程如下:
- 下载OpenCV SDK(如
opencv-4.8.0-windows.exe),解压至指定目录(例如C:\OpenCV\opencv)。 - 设置系统环境变量
OPENCV_DIR = C:\OpenCV\opencv\build\x64\vc17(根据实际VC版本调整路径)。 - 将
%OPENCV_DIR%\bin添加到系统PATH中,以便运行时能找到.dll文件。 - 在VS项目属性中进行以下三类设置:包含目录、库目录、附加依赖项。
配置示例(x64 Release模式)
| 配置项 | 路径 |
|---|---|
| 包含目录 | C:\OpenCV\opencv\build\include C:\OpenCV\opencv\build\include\opencv2 |
| 库目录 | C:\OpenCV\opencv\build\x64\vc17\lib |
| 附加依赖项(部分) | opencv_core480.lib opencv_imgcodecs480.lib opencv_imgproc480.lib opencv_highgui480.lib |
注意:后缀为
480表示OpenCV 4.8.0版本,不同版本需对应修改。
// 示例代码:测试OpenCV是否成功链接
#include <opencv2/core.hpp>
#include <opencv2/imgcodecs.hpp>
#include <opencv2/highgui.hpp>
#include <iostream>
int main() {
std::cout << "OpenCV Version: " << CV_VERSION << std::endl;
cv::Mat img = cv::Mat::zeros(100, 100, CV_8UC3);
if (!img.empty()) {
std::cout << "OpenCV initialized successfully!" << std::endl;
}
return 0;
}
逐行解析:
- 第1~3行:引入必要的OpenCV模块头文件。
- 第6行:输出当前编译所链接的OpenCV版本号,用于验证配置正确性。
- 第7行:创建一个100×100大小的三通道全黑图像(初始化为0),这是对 core 模块功能的简单调用。
- 第8~10行:判断图像是否为空,非空说明Mat对象正常构造,间接证明库已正确加载。
此代码若能顺利编译并打印出版本信息,则表明OpenCV动态链接配置成功。
2.1.2 包含路径、库路径设置及依赖项添加方法
在Visual Studio中,这些配置应在项目的“属性页”中完成:
graph TD
A[右键项目 → 属性] --> B{配置类型}
B --> C[Debug 或 Release]
C --> D[VC++ 目录]
D --> E[包含目录: 添加 .h 所在路径]
D --> F[库目录: 添加 .lib 所在路径]
D --> G[链接器 → 输入 → 附加依赖项]
G --> H[添加 opencv_*.lib 列表]
H --> I[生成解决方案]
I --> J{成功?}
J -- 是 --> K[运行测试程序]
J -- 否 --> L[检查路径拼写、位数匹配(x64/x86)]
常见错误包括:
- LNK2019 / LNK2001 错误 :未正确添加 .lib 文件或路径错误;
- 找不到头文件 :包含目录未设置或路径错误;
- 运行时报错“找不到xxx.dll” :系统PATH未包含OpenCV的 bin 目录。
建议建立统一的OpenCV配置模板,避免重复劳动。此外,可以使用 vcpkg 或 CMake 自动化管理依赖,提高工程可移植性。
2.1.3 版本兼容性问题与常见编译错误排查
OpenCV版本迭代频繁,不同主版本之间可能存在API不兼容。例如,OpenCV 3.x与4.x在某些函数命名、参数顺序上有差异。因此,在配置时应特别注意:
| 问题类型 | 原因 | 解决方案 |
|---|---|---|
| 运行时崩溃(Access Violation) | 使用了错误位数的库(如x86库配x64项目) | 检查项目平台是否与OpenCV预编译库一致 |
| 函数未定义(undefined reference) | 忘记添加某个模块的 .lib |
查阅文档确认所需模块,补全依赖项 |
cv::imread 返回空图像 |
图像路径无效或格式不受支持 | 使用绝对路径测试,检查扩展名 |
highgui 窗口无法显示 |
缺少 opencv_world 或未链接 gdi32.lib |
确保GUI相关库已包含,必要时手动添加系统库 |
例如,若使用 cv::namedWindow() 出现链接错误,可能需要额外添加 gdi32.lib 、 comdlg32.lib 、 user32.lib 等Windows系统库。
2.2 使用imread函数加载图像并验证数据完整性
图像处理的第一步永远是从磁盘或摄像头读取原始像素数据。OpenCV提供 cv::imread() 函数作为标准接口,其灵活性和健壮性直接影响后续处理流程的稳定性。
2.2.1 imread支持的图像格式及其参数选项
cv::imread(const String& filename, int flags) 支持多种常见图像格式,包括但不限于:
| 格式 | 扩展名 | 是否默认支持 |
|---|---|---|
| JPEG | .jpg, .jpeg | ✅ |
| PNG | .png | ✅ |
| BMP | .bmp | ✅ |
| TIFF | .tiff, .tif | ✅(需编译时启用) |
| WebP | .webp | ✅ |
| HDR | .hdr | ✅ |
第二个参数 flags 控制图像加载方式,常用值包括:
| flag | 描述 |
|---|---|
IMREAD_COLOR |
强制加载为三通道彩色图像(BGR) |
IMREAD_GRAYSCALE |
加载为单通道灰度图像(8位) |
IMREAD_UNCHANGED |
保留Alpha通道(如有) |
IMREAD_ANYDEPTH |
支持16/32位深度图像 |
cv::Mat img_color = cv::imread("input.jpg", cv::IMREAD_COLOR);
cv::Mat img_gray = cv::imread("input.jpg", cv::IMREAD_GRAYSCALE);
参数说明:
- 若省略 flags ,默认行为等同于 IMREAD_COLOR ;
- 即使源图是灰度图, IMREAD_COLOR 也会将其扩展为三通道;
- IMREAD_GRAYSCALE 会对多通道图像自动执行灰度化(内部调用类似加权平均法)。
2.2.2 Mat对象的数据结构解析与图像通道判别
cv::Mat 是OpenCV中最核心的数据容器,封装了图像的维度、数据指针、步长(step)、类型等信息。
std::cout << "Dimensions: " << img_gray.dims << std::endl;
std::cout << "Rows: " << img_gray.rows << ", Cols: " << img_gray.cols << std::endl;
std::cout << "Channels: " << img_gray.channels() << std::endl;
std::cout << "Data Type: " << img_gray.type() << std::endl;
std::cout << "Step: " << img_gray.step << " bytes" << std::endl;
输出示例:
Dimensions: 2
Rows: 480, Cols: 640
Channels: 1
Data Type: 0
Step: 640 bytes
其中:
- type() 返回值 0 表示 CV_8UC1 (8位无符号单通道);
- step 表示每行字节数,对于灰度图等于列数;
- 可通过 CV_8UC(n) 宏反查数据类型含义。
可通过以下表格快速对照OpenCV数据类型编码规则:
| 数值 | 类型 | 含义 |
|---|---|---|
| 0 | CV_8UC1 | 8位无符号,1通道 |
| 16 | CV_8UC2 | 8位无符号,2通道 |
| 24 | CV_8UC3 | 8位无符号,3通道 |
| 6 | CV_32FC1 | 32位浮点,1通道 |
2.2.3 图像加载失败的异常检测与调试策略
图像加载失败极为常见,原因包括路径错误、权限不足、格式损坏等。必须在程序中加入健壮的检查机制。
cv::Mat img = cv::imread("data/photo.png");
if (img.empty()) {
std::cerr << "Error: Could not load image at 'data/photo.png'" << std::endl;
std::cerr << "Possible causes:" << std::endl;
std::cerr << "- File does not exist" << std::endl;
std::cerr << "- Invalid format or corrupted file" << std::endl;
std::cerr << "- Path uses backslashes; try forward slashes or raw string" << std::endl;
return -1;
}
增强调试技巧:
- 使用 _fullpath() 或 std::filesystem::exists() 预先检查文件是否存在;
- 在Windows中路径分隔符应使用双反斜杠 \\ 或前缀 R"(C:\path\to\file)" ;
- 对相对路径敏感,建议在调试时打印当前工作目录: system("cd");
flowchart LR
Start[开始加载图像] --> Read[调用imread]
Read --> Check{Mat.empty()?}
Check -- Yes --> Error[输出错误日志]
Check -- No --> Success[继续处理]
Error --> End
Success --> End
该流程图展示了典型的图像加载安全控制逻辑,适用于所有生产级图像处理程序。
2.3 彩色图像到灰度图像的转换机制
虽然 imread 可直接加载灰度图,但在许多场景中仍需先读取彩色图像再进行灰度化,以便保留原始数据副本或实现自定义转换算法。
2.3.1 cvtColor函数的使用语法与颜色空间模型
OpenCV提供通用的颜色空间转换函数:
void cv::cvtColor(
InputArray src,
OutputArray dst,
int code,
int dstCn = 0
);
参数说明:
- src : 输入图像(必须是非空Mat);
- dst : 输出图像(自动分配大小和类型);
- code : 转换代码,如 COLOR_BGR2GRAY ;
- dstCn : 指定目标通道数(一般设为0自动推断)。
cv::Mat bgr_img = cv::imread("color.jpg");
cv::Mat gray_img;
cv::cvtColor(bgr_img, gray_img, cv::COLOR_BGR2GRAY);
支持的转换模式非常丰富,例如:
- COLOR_RGB2GRAY
- COLOR_BGR2HSV
- COLOR_GRAY2BGR (升维用于叠加绘制)
2.3.2 灰度化算法原理:加权平均法
OpenCV采用ITU-R BT.601标准的加权公式:
Y = 0.299R + 0.587G + 0.114B
该权重反映了人眼对绿色最敏感、红色次之、蓝色最不敏感的生理特性。相比简单的算术平均 $(R+G+B)/3$,加权法能更好保留图像感知亮度。
可手动实现对比验证:
cv::Mat manual_gray(const cv::Mat& bgr) {
cv::Mat result = cv::Mat::zeros(bgr.rows, bgr.cols, CV_8UC1);
for (int i = 0; i < bgr.rows; ++i) {
for (int j = 0; j < bgr.cols; ++j) {
const auto& pixel = bgr.at<cv::Vec3b>(i, j);
uchar blue = pixel[0];
uchar green = pixel[1];
uchar red = pixel[2];
result.at<uchar>(i, j) =
static_cast<uchar>(0.114 * blue + 0.587 * green + 0.299 * red);
}
}
return result;
}
逐行解释:
- 第2行:创建与原图同尺寸的单通道矩阵;
- 第5~6行:遍历每个像素;
- 第7行:获取BGR三通道值(OpenCV默认BGR顺序!);
- 第10行:按ITU-R BT.601公式加权求和并转为 uchar 。
经测试,该结果与 cv::cvtColor 高度一致(误差≤1),验证了其内部实现机制。
2.3.3 转换结果可视化与像素值范围验证
最后应验证转换结果的有效性:
double minVal, maxVal;
cv::minMaxLoc(gray_img, &minVal, &maxVal);
std::cout << "Gray level range: [" << minVal << ", " << maxVal << "]" << std::endl;
// 显示图像
cv::imshow("Original", bgr_img);
cv::imshow("Grayscale", gray_img);
cv::waitKey(0);
理想情况下,灰度值应在 [0, 255] 范围内。若出现超出范围的情况(如浮点运算后未截断),需使用 cv::convertScaleAbs() 或 cv::saturate_cast 确保数据合法性。
综上所述,本章详细阐述了OpenCV在VC++环境下的完整配置流程、图像加载机制及色彩空间转换原理。通过理论结合实践的方式,构建了一个稳定可靠的图像输入管道,为后续章节中直方图的精确计算奠定了坚实基础。
3. 基于calcHist函数的灰度直方图计算实现
在数字图像处理中,直方图是揭示图像像素分布特性的核心工具。OpenCV 提供了 calcHist 函数作为标准接口用于高效地统计图像中各灰度级的出现频率。该函数不仅支持单通道灰度图像的一维直方图计算,还具备处理多通道彩色图像、构建高维联合直方图的能力。深入理解 calcHist 的参数机制与底层数据组织方式,对于开发高性能图像分析系统至关重要。尤其在自动化曝光评估、对比度增强预处理、目标检测先验建模等场景中,精确的直方图统计结果直接影响后续算法的鲁棒性。
本章将从函数原型入手,逐层剖析其调用逻辑,并结合实际代码演示如何正确配置输入参数以获得符合预期的统计输出。同时,探讨多通道图像的分离与联合直方图构造方法,扩展对色彩空间分布的理解维度。最后,解析 OpenCV 内部如何使用 Mat 容器存储直方图数据,掌握遍历与提取频次信息的技术路径,为后续可视化与数学分析打下坚实基础。
3.1 calcHist函数接口详解与参数配置
OpenCV 中的 calcHist 是一个高度灵活且功能强大的直方图计算函数,广泛应用于图像特征提取和视觉分析任务中。其完整函数原型如下(C++ 接口):
void calcHist(const Mat* images, int nimages,
const int* channels, InputArray mask,
OutputArray hist, int dims, const int* histSize,
const float** ranges, bool uniform = true,
bool accumulate = false);
要正确使用该函数,必须对其每一个参数有清晰的认知。下面通过子章节逐一展开说明。
3.1.1 输入图像、通道数、掩码、直方图维度与区间设定
calcHist 的第一个参数 images 是一个指向 Mat 数组的指针,通常传入单张图像时写作 &image 。 nimages 指定数组中图像的数量,一般为 1。
第二个关键参数 channels 是一个整型数组,指定需要参与统计的通道索引。例如,在 BGR 图像中,若只想统计蓝色通道(第0通道),则定义:
int channel[] = {0};
对于灰度图,此值应设为 {0} 。
第三个参数 mask 允许我们仅对图像中的特定区域进行直方图统计。若不需要区域限制,则传入 noArray() 或 Mat() 表示无掩码。当提供非空掩码时,只有对应位置像素值为非零的区域才会被计入统计。
第四个参数 hist 是输出变量,类型为 OutputArray ,通常用 Mat 对象接收结果。
第五个参数 dims 定义直方图的维度数。对于单通道灰度图,设置为 1;若同时分析两个颜色通道(如B和R),可设为 2 构建二维直方图。
第六个参数 histSize 是一个整型数组,表示每个维度上的“分箱”(bins)数量。例如,将 0~255 灰度范围划分为 256 个 bin,即每级一个 bin:
int histSize[] = {256};
第七个参数 ranges 是浮点型二级指针,指向一组范围数组。每个通道需提供最小值和最大值。对于标准 8 位图像,定义如下:
float range[] = {0, 256}; // 注意:右边界不包含
const float* ranges[] = {range};
最后一个参数 uniform 表示是否采用均匀分箱(通常是 true ),而 accumulate 控制是否累加到已有直方图上(初始化时建议 false )。
示例代码与参数说明
以下是一个完整的调用示例:
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
int main() {
Mat image = imread("sample.jpg", IMREAD_GRAYSCALE);
if (image.empty()) {
cout << "无法加载图像" << endl;
return -1;
}
Mat hist;
int channels[] = {0}; // 单通道灰度
int histSize[] = {256}; // 256个bin
float range[] = {0, 256}; // 值域[0,256)
const float* ranges[] = {range};
calcHist(&image, 1, channels, Mat(), hist, 1, histSize, ranges, true, false);
cout << "直方图大小:" << hist.size() << endl; // 输出:[256 x 1]
return 0;
}
代码逻辑逐行解读
- 第5行 :读取图像并强制转换为灰度模式,确保只有一个通道。
- 第9行 :声明输出直方图容器
hist,OpenCV 会自动分配内存。 - 第10–13行 :定义参数数组,包括通道索引、bin 数量、取值范围。
- 第14–15行 :将
range封装成双层指针形式,满足函数要求。 - 第17行 :调用
calcHist执行计算。由于是灰度图,仅统计单一通道。 - 第19行 :打印输出尺寸验证结果——应为 256×1 的单列矩阵。
⚠️ 注意事项:尽管像素值范围是 [0,255],但
ranges应写成{0, 256},因为 OpenCV 使用左闭右开区间[min, max)来划分 bins。
| 参数名 | 类型 | 含义说明 |
|---|---|---|
| images | const Mat* |
输入图像数组地址 |
| nimages | int |
图像个数(常为1) |
| channels | const int* |
统计的通道索引数组 |
| mask | InputArray |
可选掩码,限定区域 |
| hist | OutputArray |
输出直方图(Mat) |
| dims | int |
直方图维度(1=灰度) |
| histSize | const int* |
每维的bin数量 |
| ranges | const float** |
每维的取值范围 |
| uniform | bool |
是否均匀分箱 |
| accumulate | bool |
是否累积更新 |
graph TD
A[开始] --> B[准备输入图像]
B --> C{是否为灰度图?}
C -->|是| D[设置channel={0}]
C -->|否| E[使用cvtColor转灰度或选择特定通道]
D --> F[定义histSize和ranges]
E --> F
F --> G[调用calcHist]
G --> H[获取Mat格式直方图]
H --> I[结束]
该流程图展示了调用 calcHist 的标准步骤,强调了通道选择与参数配置的关键节点。
3.1.2 直方图维数选择(单通道灰度图对应一维直方图)
直方图的“维度”决定了其描述的数据复杂度。在一维情况下,直方图只记录某一属性(如亮度)的分布情况;而在二维或多维情形下,它可以反映多个变量之间的联合概率分布。
对于典型的 8 位灰度图像,所有像素值落在 [0,255] 范围内,因此只需一个维度即可完整表达其强度分布特性。此时, dims = 1 , histSize[0] = 256 ,形成一个长度为 256 的数组,其中第 i 个元素表示灰度值为 i 的像素总数。
相比之下,彩色图像具有三个通道(BGR),若希望了解整体颜色分布,可以分别计算每个通道的直方图(仍为一维),也可以构建二维或三维联合直方的优点在于能捕捉颜色组合信息,例如红色与绿色共现的频率,这对肤色检测或物体识别非常有用。
然而,维度增加会导致“维度灾难”问题。假设每个通道划分为 32 个 bin,则三维直方图将有 $32^3 = 32768$ 个单元格,远超大多数应用场景所需,且稀疏性强,难以有效训练模型。
因此,在多数初级图像分析任务中,优先推荐使用一维直方图进行快速诊断。它既能反映亮度偏移、对比度高低等问题,又具备良好的计算效率和可解释性。
例如,观察一张过曝照片的灰度直方图,会发现大部分能量集中在右侧(接近255),左侧几乎为零;反之,欠曝图像则集中在左侧(接近0)。这种直观判断正是建立在一维统计的基础之上。
此外,OpenCV 支持跨图像批量计算直方图。例如,在视频监控系统中,可以连续采集多帧背景图像,设置 nimages > 1 并关闭 accumulate ,从而生成平均背景直方图作为异常检测基准。
3.1.3 像素值范围划分(bins数量对分辨率的影响)
histSize 参数决定每个维度上将原始像素值划分为多少个“箱子”(bins),直接影响直方图的空间分辨率。
以灰度图像为例,若设置 histSize[0] = 256 ,意味着每个灰度级独立作为一个 bin,能够精确反映每个级别的像素数量。这是最常见的配置,适用于精细分析。
但如果资源受限或关注趋势而非细节,可减少 bin 数量,如设为 32 或 64。此时每个 bin 覆盖多个灰度级。例如, bins=32 时,每个 bin 跨越 8 个灰度级(256 ÷ 32 = 8),相当于对原始分布进行了粗粒度量化。
这带来两个显著影响:
- 内存占用降低 :直方图向量更小,便于嵌入式部署;
- 抗噪能力增强 :微小的像素波动不会引起 bin 频率剧烈变化,提升稳定性。
但也存在缺点:丢失细节信息,可能导致误判。比如原图中有两个峰值分别位于 100 和 108,在 bins=32 下它们可能落入同一区间(100~107 属于第 12 区间),合并成单一峰,掩盖真实双峰结构。
因此,选择合适的 bin 数量需权衡精度与性能。经验法则如下:
- 科学研究 / 医疗影像 :建议
bins = 256,保留全部信息; - 实时工业检测 :可用
bins = 64或128,兼顾速度与表现; - 移动端应用 :推荐
bins ≤ 32,优化资源消耗。
以下代码展示不同 bin 设置下的效果差异:
// 分别用 256 和 32 bins 计算直方图
int sizes[] = {256, 32};
for (int i = 0; i < 2; ++i) {
Mat h;
int hs[] = {sizes[i]};
float r[] = {0, 256};
const float* rr[] = {r};
calcHist(&image, 1, channels, Mat(), h, 1, hs, rr, true, false);
cout << "Bins=" << sizes[i] << ", 最大频次=" << *max_element(h.begin<float>(), h.end<float>()) << endl;
}
输出结果可用于比较峰值响应的变化趋势。
综上所述,合理配置 calcHist 的各项参数是实现精准图像分析的前提。特别是在实际工程中,应根据具体需求动态调整 dims 和 histSize ,避免盲目追求高分辨率导致性能下降。
3.2 多通道图像直方图的扩展应用
虽然灰度直方图已能反映亮度分布,但在许多高级视觉任务中,仅依赖亮度信息不足以区分对象。此时需引入彩色通道直方图,利用颜色分布特征提升识别准确性。
OpenCV 的 calcHist 支持对多通道图像直接操作,允许开发者灵活选择感兴趣的通道组合进行统计。
3.2.1 分离BGR通道并分别计算各通道直方图
对于彩色图像,首先可通过 split 函数将其分解为独立的蓝色(B)、绿色(G)、红色(R)三个单通道矩阵:
Mat bgrImage = imread("color.jpg");
if (bgrImage.channels() != 3) {
cout << "图像不是三通道!" << endl;
return -1;
}
vector<Mat> channelsVec;
split(bgrImage, channelsVec); // 分离为B、G、R
Mat histB, histG, histR;
int histSize[] = {256};
float range[] = {0, 256};
const float* ranges[] = {range};
// 分别计算各通道直方图
calcHist(&channelsVec[0], 1, 0, Mat(), histB, 1, histSize, ranges);
calcHist(&channelsVec[1], 1, 0, Mat(), histG, 1, histSize, ranges);
calcHist(&channelsVec[2], 1, 0, Mat(), histR, 1, histSize, ranges);
上述代码中, split 将原图拆解为三个 Mat 存储在 vector 中,随后分别对每个通道调用 calcHist 。注意此处 channels 参数传入 0 ,因为每个 Mat 已是单通道。
这种方式的好处是可以单独分析某颜色成分的分布。例如,火焰图像通常在红色通道有明显高亮区域,其 histR 在高端值处会出现尖锐峰值。
| 通道 | 特征表现 |
|---|---|
| Blue | 天空、水体区域较强 |
| Green | 植被、草地主导 |
| Red | 人脸、火焰、交通标志突出 |
通过比较三者直方图形态,可初步判断图像内容倾向。
pie
title 各通道能量占比示例
“Red” : 45
“Green” : 30
“Blue” : 25
该饼图模拟了一张暖色调照片的颜色能量分布情况。
3.2.2 多维直方图构建思路(如二维色彩分布)
更高阶的应用是构建二维直方图,同时统计两个通道的联合分布。例如,分析红绿二维分布:
int channels[] = {2, 1}; // R 和 G 通道
int histSize[] = {32, 32}; // 每通道32 bins
float hranges[] = {0, 256};
const float* ranges[] = {hranges, hranges};
Mat hist2D;
calcHist(&bgrImage, 1, channels, Mat(), hist2D, 2, histSize, ranges, true, false);
此时 hist2D 是一个 $32 \times 32$ 的矩阵, hist2D.at<float>(i,j) 表示红色处于第 i 个区间且绿色处于第 j 个区间的像素数量。
这类直方图特别适合肤色建模:人类皮肤在 RG 空间中呈现聚集性分布,可通过查找高频区域建立肤色模板。
但要注意,二维及以上直方图不再适合用条形图显示,通常采用热力图(heatmap)可视化:
Mat heatmap;
normalize(hist2D, heatmap, 0, 255, NORM_MINMAX, CV_8U);
applyColorMap(heatmap, heatmap, COLORMAP_JET);
imshow("2D Histogram Heatmap", heatmap);
这种方法广泛应用于目标跟踪中的均值漂移(MeanShift)算法。
3.3 直方图数据存储结构分析
OpenCV 使用 Mat 类统一管理直方图数据,无论是一维还是多维,都以矩阵形式封装。
3.3.1 Mat容器中直方图数据的组织形式
对于一维直方图, calcHist 返回的 Mat 通常是单列或单行的浮点型矩阵( CV_32F )。可以通过 .reshape(1) 强制变为一行以便处理:
hist = hist.reshape(1); // 变为1行N列
访问某个灰度级 k 的频次:
float freq = hist.at<float>(0, k); // 若为单行
// 或
float freq = hist.at<float>(k); // 若为单列
其内部存储顺序严格按照 bin 索引递增排列,即索引 0 对应 [0, binWidth),索引 1 对应 [binWidth, 2×binWidth),依此类推。
3.3.2 遍历直方图数组获取每个灰度级频次的方法
常用遍历方式有两种:
方法一:指针访问(高效)
float* data = hist.ptr<float>(0);
for (int i = 0; i < 256; ++i) {
cout << "Gray " << i << ": " << data[i] << " pixels" << endl;
}
方法二:迭代器访问(安全)
for (auto it = hist.begin<float>(); it != hist.end<float>(); ++it) {
cout << "Freq: " << *it << endl;
}
前者性能更高,后者避免越界风险。
3.3.3 数据类型转换(float型累积值处理)
calcHist 默认输出 CV_32F 类型,即使输入是整型图像。这是因为某些情况下(如累积模式),需支持小数值叠加。
若需转换为整型便于绘图或存储:
Mat histInt;
hist.convertTo(histInt, CV_32S); // 转为32位整型
注意:转换前应确认无负值或溢出风险。
此外,在归一化之前,常需将频次映射到 [0,255] 或画布高度,这将在第四章详细讨论。
| 操作 | 方法 |
|---|---|
| 获取尺寸 | hist.size() |
| 查询类型 | hist.type() → 应为 CV_32FC1 |
| 提取最大值 | minMaxLoc(hist, nullptr, &maxVal) |
| 内存布局 | 连续存储,可用 .isContinuous() 判断 |
综上,掌握 Mat 中直方图的组织规律,是连接统计与可视化的桥梁,也是实现自动化图像分析流程不可或缺的一环。
4. 直方图数据归一化与可视化预处理
在完成灰度直方图的计算后,原始的频次统计值往往不具备直接用于可视化的条件。这些数值可能范围极大(例如数万像素集中在某一灰度级),也可能极小(某些稀有灰度级仅有个位数像素),因此无法直接映射到图像坐标系统中进行图形绘制。为了将直方图从“数据域”转换为“显示域”,必须对数据进行归一化和坐标映射等预处理操作。本章深入探讨如何通过数学变换与OpenCV函数协同处理,使直方图数据适配于后续绘图需求。
4.1 直方图归一化处理方法
归一化是将一组原始数据缩放到特定区间内的标准数学操作,在图像处理中尤为关键。对于直方图而言,其本质是一组非负整数构成的频率分布序列,每个元素代表某个灰度级出现的次数。若不加以调整,最大频次可能远超画布高度,而最小值则接近零,导致视觉上难以分辨趋势。归一化的目的是保留相对分布特征的同时,将其动态范围压缩至适合显示的空间内。
4.1.1 归一化的数学原理:将频次映射至指定范围(如0~255或0~图像高度)
归一化的核心思想是线性或非线性的比例缩放。最常用的为 线性归一化 ,公式如下:
v_{\text{norm}} = \frac{v - v_{\min}}{v_{\max} - v_{\min}} \times (b - a) + a
其中:
- $ v $:原始直方图某灰度级的频次;
- $ v_{\min}, v_{\max} $:整个直方图中的最小值与最大值;
- $ a, b $:目标区间边界,通常设为 $[0, H]$,$H$ 为画布高度。
当所有频次均被此公式处理后,结果会被限制在 $[a, b]$ 区间内,便于后续以像素单位表示柱状条的高度。
值得注意的是,由于直方图频次均为非负数且 $v_{\min}$ 一般为0(除非使用掩码排除部分区域),上述公式可简化为:
v_{\text{norm}} = \frac{v}{v_{\max}} \times H
这使得实现更为高效,也更符合实际应用场景。
此外,还存在 非线性归一化 策略,如对数变换:
v_{\text{log}} = c \cdot \log(1 + v)
该方式适用于直方图中存在极端峰值的情况(如背景占主导),能有效拉伸低频区域细节,增强整体对比度感知。
| 归一化类型 | 公式 | 适用场景 |
|---|---|---|
| 线性归一化 | $ \frac{v}{v_{\max}} \times H $ | 数据分布均匀、无明显异常峰值 |
| 对数归一化 | $ c \cdot \log(1 + v) $ | 存在极高频率项,需突出低频细节 |
| 最大值归一化(OpenCV默认) | $ \frac{v}{v_{\max}} \times \text{desired_max} $ | 快速标准化显示 |
// 示例代码:手动实现线性归一化
std::vector<int> hist; // 假设已通过calcHist获得直方图数据
int histMax = *std::max_element(hist.begin(), hist.end());
int canvasHeight = 256;
std::vector<double> normalizedHist(256);
for (int i = 0; i < 256; ++i) {
normalizedHist[i] = static_cast<double>(hist[i]) / histMax * canvasHeight;
}
逐行解析:
1. std::vector<int> hist; —— 存储原始直方图频次数据,索引对应灰度级0~255。
2. int histMax = *std::max_element(...); —— 使用STL算法查找最大频次,作为归一化基准。
3. std::vector<double> normalizedHist(256); —— 创建浮点型容器存储归一化后的高度值,避免整数截断误差。
4. 循环体内执行线性缩放,将原始频次转换为可在画布上表示的像素高度。
该方法虽简单但效率较低,尤其在实时系统中应优先采用向量化操作。
4.1.2 OpenCV中normalize函数的应用参数说明
OpenCV提供了高效的 cv::normalize() 函数来替代手动计算,支持多种归一化模式,并可作用于 Mat 类型数据,极大提升开发效率。
cv::Mat hist; // 来自calcHist的结果
cv::Mat histNorm;
double histMaxVal;
// 方法一:使用cv::normalize进行归一化
cv::normalize(hist, histNorm, 0, 255, cv::NORM_MINMAX, CV_8UC1);
// 方法二:归一化至画布高度(如300px)
cv::normalize(hist, histNorm, 0, 300, cv::NORM_MINMAX, CV_32FC1);
参数详解:
- src : 输入矩阵(即直方图 Mat);
- dst : 输出归一化后的矩阵;
- alpha : 目标区间的下限(如0);
- beta : 上限(如255或画布高);
- norm_type : 归一化类型,常用 cv::NORM_MINMAX 表示基于最大最小值缩放;
- dtype : 输出数据类型,若用于绘图建议使用浮点型( CV_32F )以防精度丢失;
- 可选参数 mask :可用于仅对特定灰度区间归一化。
⚠️ 注意:若原始直方图为单列
Mat(dims=1, size=256×1),需确保其连续性以便安全访问。可通过isContinuous()判断并用.reshape(1)强制调整布局。
下面是一个完整调用示例:
cv::Mat hist, histNormalized;
bool uniform = true;
cv::calcHist(&grayImage, 1, channels, cv::Mat(), hist, 1, &histSize, ranges, uniform, false);
// 归一化到画布高度300像素
int canvasHeight = 300;
cv::normalize(hist, histNormalized, 0, canvasHeight, cv::NORM_MINMAX, CV_32F);
逻辑分析:
- calcHist 输出的 hist 是一个单列 Mat ,类型为 CV_32F (浮点型);
- cv::normalize 自动检测其最大最小值(此处最小值常为0),然后按线性关系缩放;
- 输出 histNormalized 中每个元素即为对应灰度级应绘制的高度(单位:像素);
- 使用 CV_32F 类型保证中间计算无溢出,便于后续浮点运算。
该过程不仅提升了代码简洁性,而且底层由SIMD指令优化,性能显著优于纯C++循环。
4.1.3 线性与非线性归一化方式对显示效果的影响
尽管线性归一化最为直观,但在面对复杂图像时可能存在局限。考虑一幅夜景图像,大部分像素集中于低灰度区(暗部),仅有少量高亮光源(路灯、车灯)。此时直方图会出现一个巨大的低灰度峰和若干孤立尖峰,线性归一化会导致这些亮点被过度放大,而其余区域几乎不可见。
为此,引入 对数归一化 可缓解此类问题:
cv::Mat logHist;
hist += cv::Scalar(1); // 防止log(0)
cv::log(hist, logHist);
cv::normalize(logHist, logHist, 0, canvasHeight, cv::NORM_MINMAX, CV_32F);
此方法先对频次加1防止取对数出错,再应用自然对数变换,最后归一化。其优势在于压缩高频差异、拉伸低频差异,使整体分布更均衡。
以下流程图展示了两种归一化路径的选择逻辑:
graph TD
A[原始直方图数据] --> B{是否存在极端峰值?}
B -- 是 --> C[采用对数归一化]
B -- 否 --> D[采用线性归一化]
C --> E[加1防止log(0)]
E --> F[应用log函数]
F --> G[归一化至画布高度]
D --> H[直接归一化 NORM_MINMAX]
G --> I[输出可视化高度数组]
H --> I
实验表明,在医学影像、遥感图像等动态范围较大的场景中,对数归一化更能揭示隐藏结构;而在普通摄影图像中,线性方式已足够清晰表达亮度分布。
4.2 构建直方图绘制画布
完成数据归一化后,下一步是创建一个空白图像作为绘图载体。这个“画布”本质上是一个多通道或单通道的 cv::Mat 对象,具备固定尺寸和背景色,供后续绘制坐标轴、柱状条和文字标注使用。
4.2.1 创建空白Mat图像用于绘图输出
OpenCV中通过构造函数或静态方法创建空白图像:
int width = 256; // X轴:灰度级0~255
int height = 300; // Y轴:归一化后的最大高度
cv::Mat canvas = cv::Mat::zeros(height, width, CV_8UC3); // 彩色画布
这里使用 CV_8UC3 表示三通道8位无符号整型,适合彩色绘制(如不同通道直方图叠加)。若仅绘制单一直方图,也可使用灰度图 CV_8UC1 并配合颜色填充技巧。
另一种常见做法是初始化为白色背景:
cv::Mat canvas = cv::Mat::ones(height, width, CV_8UC3) * 255;
cv::Mat::ones() 创建全1矩阵,乘以255得到白色(BGR格式下为(255,255,255))。
| 参数 | 含义 | 推荐设置 |
|---|---|---|
| rows (height) | 画布垂直像素数 | ≥ 归一化目标高度(如300) |
| cols (width) | 水平像素数 | 256(每灰度一级一列) |
| type | 数据类型 | CV_8UC3(彩色)或 CV_8UC1(灰度) |
| 初始化方式 | zeros / ones / Scalar() | 根据背景需求选择 |
创建完成后,可通过 canvas.empty() 验证是否成功分配内存。
4.2.2 设定画布尺寸与背景色(通常为白色)
合理的画布设计应兼顾分辨率与美观性。虽然宽度固定为256(对应256个灰度级),但高度可根据归一化策略灵活设定。过高会浪费空间,过低则可能导致柱体溢出或重叠。
推荐实践:
- 宽度:256 px(每列代表一个灰度级)
- 高度:200~400 px(视归一化上限而定)
- 背景色:白色(便于观察深色线条)
const int HIST_WIDTH = 256;
const int HIST_HEIGHT = 300;
cv::Scalar BACKGROUND_COLOR = cv::Scalar(255, 255, 255); // 白色
cv::Mat histCanvas(HIST_HEIGHT, HIST_WIDTH, CV_8UC3, BACKGROUND_COLOR);
若需支持透明背景(PNG保存),应使用四通道:
cv::Mat alphaCanvas(HIST_HEIGHT, HIST_WIDTH, CV_8UC4, cv::Scalar(255, 255, 255, 0));
其中第四个分量为Alpha通道,0表示完全透明。
此外,还可添加边距(margin)以容纳坐标轴标签:
const int MARGIN_LEFT = 40;
const int MARGIN_BOTTOM = 30;
const int ACTUAL_WIDTH = HIST_WIDTH;
const int ACTUAL_HEIGHT = HIST_HEIGHT - MARGIN_BOTTOM;
cv::Mat paddedCanvas(cv::Size(ACTUAL_WIDTH + MARGIN_LEFT, HIST_HEIGHT), CV_8UC3, BACKGROUND_COLOR);
这样可在左侧留出空间绘制Y轴刻度,底部预留X轴标注位置。
graph LR
A[画布创建] --> B[确定尺寸]
B --> C[选择背景色]
C --> D[初始化Mat对象]
D --> E[可选:添加边距]
E --> F[返回可用绘图区域]
此结构化流程确保画布具备良好的扩展性与可维护性,为后续绘图奠定基础。
4.3 数据极值分析与坐标系映射
即使完成了归一化,仍需解决一个重要问题:如何将数据坐标(灰度级 vs 频次)准确映射到屏幕坐标(x像素 vs y像素)。这一过程涉及坐标系翻转、偏移修正和比例缩放。
4.3.1 查找直方图最大值以确定Y轴缩放比例
Y轴缩放比例取决于归一化前的最大频次。若忽略此步骤,可能导致图形失真或溢出。
double minVal, maxVal;
cv::Point minLoc, maxLoc;
cv::minMaxLoc(hist, &minVal, &maxVal, &minLoc, &maxLoc);
std::cout << "Max frequency: " << maxVal << std::endl;
std::cout << "Peak at gray level: " << maxLoc.x << std::endl;
cv::minMaxLoc() 不仅返回极值,还能定位其位置( Point 类型),有助于识别图像中最常见灰度级。
结合该信息,可动态设置归一化目标:
int targetHeight = 250;
if (maxVal > 0) {
cv::normalize(hist, histNorm, 0, targetHeight, cv::NORM_MINMAX, CV_32F);
}
此举实现了自适应缩放,无论输入图像内容如何变化,直方图总能合理填充画布。
4.3.2 X轴灰度级与像素坐标的线性映射关系
X轴映射较为简单:灰度级 $g \in [0,255]$ 对应像素横坐标 $x \in [0, 255]$,即一对一映射:
x = g
因此第 $i$ 个灰度级对应的柱体左上角X坐标为 $i$,右下角为 $i+1$(若柱宽为1像素)。
但若希望柱体更宽(如2像素),则需重新规划布局:
int barWidth = 2;
int x = i * barWidth;
int width = barWidth;
此时总宽度变为 $256 \times 2 = 512$ px,需相应调整画布尺寸。
4.3.3 实现从数据域到屏幕域的坐标变换逻辑
最关键的是Y轴方向问题:图像坐标系原点在左上角,Y向下递增;而数学坐标系Y向上递增。因此,频次越高,柱体应越“向上生长”,即Y坐标越小。
设归一化后高度为 $h$,画布高度为 $H$,则柱体左上角Y坐标为:
y_{top} = H - h
右下角Y坐标为 $H$(底部对齐)。
综合以上规则,任意灰度级 $i$ 的矩形区域定义如下:
int x = i; // X坐标:灰度级即列号
int y_top = canvas.rows - cvRound(normalizedHist.at<float>(i)); // 顶部Y
int y_bottom = canvas.rows; // 底部Y
cv::rectangle(canvas, cv::Point(x, y_top), cv::Point(x+1, y_bottom), cv::Scalar(0,0,255), 1);
代码解释:
- cvRound() 将浮点高度转为整数像素;
- canvas.rows 即画布高度,作为Y轴基线;
- cv::rectangle() 绘制垂直条,宽度为1像素;
- 颜色设为红色(BGR: 0,0,255);
- 线条粗细为1,避免覆盖相邻柱体。
该映射逻辑确保了数据与视觉的一致性,是高质量直方图绘制的核心环节。
graph TB
A[灰度级 i] --> B[X = i]
C[归一化高度 h] --> D[Y_top = H - h]
D --> E[绘制矩形 (X,Y_top) 到 (X+1,H)]
B --> E
style E fill:#f9f,stroke:#333
综上所述,从原始频次到屏幕显示的完整流程包括:归一化 → 极值分析 → 坐标映射 → 几何绘制。每一步都不可或缺,共同保障最终图像的准确性与可读性。
5. 手动绘制灰度直方图条形图(rectangle绘图技术)
在数字图像处理中,直方图的可视化是分析图像亮度分布、对比度特性以及为后续增强或分割操作提供决策依据的关键步骤。OpenCV虽然提供了丰富的图像处理函数,但其本身并未直接封装自动绘制直方图条形图的功能。因此,掌握如何使用基础绘图函数如 rectangle 手动构建高质量的直方图显示界面,不仅是对开发者编程能力的锻炼,更是深入理解图形渲染机制和数据映射逻辑的重要实践。
本章聚焦于利用 OpenCV 的 rectangle 函数实现灰度直方图的手动绘制,重点剖析从归一化后的频次数据到屏幕像素坐标的转换过程,并通过循环结构逐级绘制256个灰度级对应的柱状条。在此基础上,进一步引入坐标轴、网格线与文本标注等增强元素,使最终输出的直方图具备专业级可读性与视觉表现力。整个流程不仅体现了底层图形 API 的灵活运用,也展示了如何将数学模型转化为直观可视化的工程实现路径。
5.1 利用rectangle函数绘制单个直方图柱状条
在 OpenCV 中, rectangle 是一个用于绘制矩形区域的核心绘图函数,广泛应用于目标检测框、区域高亮以及本场景中的直方图柱体绘制。要实现灰度直方图的可视化,首先需要理解如何使用该函数准确地表达每一个灰度级所对应的频率高度。
5.1.1 rectangle函数语法结构与边界框定义方式
rectangle 函数的基本调用格式如下:
void rectangle(Mat& img, Point pt1, Point pt2, const Scalar& color, int thickness = 1, int lineType = LINE_8, int shift = 0);
| 参数 | 类型 | 说明 |
|---|---|---|
img |
Mat& |
输入图像,即绘图画布,必须为三通道或单通道且支持颜色写入 |
pt1 |
Point |
矩形左上角坐标 (x, y) |
pt2 |
Point |
矩形右下角坐标 (x, y) |
color |
Scalar |
绘制颜色,对于 BGR 图像为 (B, G, R) 值 |
thickness |
int |
边框粗细,若为负数(如 FILLED = -1 ),则填充矩形 |
lineType |
int |
线型,可选 LINE_4 , LINE_8 (默认), LINE_AA (抗锯齿) |
shift |
int |
坐标小数位移位数,一般设为 0 |
graph TD
A[开始绘制矩形] --> B{输入图像是否有效?}
B -- 是 --> C[指定左上点pt1和右下点pt2]
C --> D[设置颜色与线宽]
D --> E[调用rectangle函数]
E --> F[完成矩形绘制]
B -- 否 --> G[抛出异常或返回错误]
例如,要在一幅图像上绘制一个从 (10,10) 到 (50,50) 的红色实心矩形,代码如下:
Mat canvas = Mat::zeros(100, 100, CV_8UC3); // 创建黑色画布
rectangle(canvas, Point(10, 10), Point(50, 50), Scalar(0, 0, 255), FILLED);
逻辑分析 :
上述代码中,Mat::zeros创建了一个 100×100 的全黑三通道图像作为画布;Point(10,10)表示左上角位置,而Point(50,50)表示右下角,两者共同界定矩形范围;Scalar(0,0,255)表示纯红色(B=0, G=0, R=255);FILLED等价于-1,表示内部填充而非仅描边。
此函数的灵活性在于可以通过控制 thickness 实现轮廓或填充效果,非常适合用于构建直方图的柱状条——每个柱体本质上就是一个竖直方向的矩形块。
5.1.2 每个灰度级对应的矩形宽度与位置计算
为了将 256 个灰度级映射到有限的图像宽度上,需合理分配每根柱子的宽度及水平间距。假设画布宽度为 histWidth ,通常设定为 512 或 256 像素,则单个灰度级占据的像素宽度可通过均分策略确定:
\text{binWidth} = \frac{\text{histWidth}}{256}
然而,在实际应用中常采用整数倍缩放,例如令 binWidth = 2 ,总宽为 512 ,以避免浮点运算带来的错位问题。
每个灰度级 $ i \in [0, 255] $ 对应的矩形左上角横坐标为:
x_{left} = i \times \text{binWidth}
右下角横坐标为:
x_{right} = x_{left} + \text{binWidth} - 1
纵坐标则依赖于当前灰度级的频次值及其归一化后的高度。由于图像坐标系原点位于左上角,Y 轴向下增长,因此柱体的高度应从底部向上“生长”,即:
y_{top} = \text{histHeight} - h_i \
y_{bottom} = \text{histHeight}
其中 $ h_i $ 是第 $ i $ 灰度级归一化后的高度值。
以下是一个具体的参数配置表:
| 参数名称 | 示例值 | 说明 |
|---|---|---|
| histWidth | 512 | 直方图画布宽度 |
| histHeight | 400 | 画布高度,决定最大柱高 |
| binWidth | 2 | 每个灰度级占2像素宽 |
| baseLine | histHeight | 柱体底边统一固定于底部 |
这种设计确保了所有柱体紧密排列、无间隙且不重叠,形成连续的条形图样式。
5.1.3 绘制颜色选择与线条粗细控制
颜色的选择直接影响直方图的视觉清晰度。对于灰度直方图,推荐使用单一鲜明颜色(如绿色、蓝色或白色),以便与背景形成对比。若在同一画布上叠加多通道直方图(如 R/G/B 分量),则应分别为各通道指定不同颜色并适当降低透明度或使用轮廓模式减少遮挡。
// 示例:绘制绿色轮廓柱体
int binWidth = 2;
int histHeight = 400;
for (int i = 0; i < 256; ++i) {
float binVal = normalizedHist.at<float>(i); // 归一化后高度
int height = static_cast<int>(binVal);
Point pt1(i * binWidth, histHeight - height); // 左上
Point pt2((i + 1) * binWidth - 1, histHeight); // 右下
rectangle(canvas, pt1, pt2, Scalar(0, 255, 0), 1, LINE_8); // 绿色边框
}
代码逐行解读 :
- 第4行:获取第i个灰度级的归一化频次(float 类型);
- 第5行:将其转换为整数高度;
- 第7–8行:计算矩形两个顶点坐标,注意 Y 方向是从上到下递增;
- 第10行:调用rectangle绘制绿色边框(B=0, G=255, R=0),线宽为1,使用8连通线型。
若希望填充柱体,只需将最后一个参数改为 FILLED (-1) :
rectangle(canvas, pt1, pt2, Scalar(0, 255, 0), FILLED);
此外,还可以结合 addWeighted 实现半透明叠加效果,适用于多图层直方图融合显示。
5.2 遍历所有灰度级完成完整直方图绘制
完整的直方图由 256 个独立柱体组成,必须通过循环逐一绘制。这一过程涉及数据遍历、坐标映射、边界判断等多个环节,任何一处疏漏都可能导致图像错乱或程序崩溃。
5.2.1 for循环遍历256个灰度级并逐个绘制柱体
核心思路是使用 for 循环从 0 到 255 遍历每个灰度级,提取其对应频次,并根据预设规则绘制矩形。以下是完整实现片段:
Mat drawHistogram(const Mat& hist, int histWidth = 512, int histHeight = 400) {
Mat histImg = Mat::zeros(histHeight, histWidth, CV_8UC3);
float maxVal = 0;
minMaxLoc(hist, nullptr, &maxVal); // 获取最大频次
int binWidth = cvRound((double)histWidth / 256);
for (int i = 0; i < 256; ++i) {
float binVal = hist.at<float>(i);
int height = static_cast<int>((binVal / maxVal) * histHeight);
Point pt1(i * binWidth, histHeight - height);
Point pt2((i + 1) * binWidth, histHeight);
rectangle(histImg, pt1, pt2, Scalar(255, 128, 0), FILLED);
}
return histImg;
}
逻辑分析 :
- 函数接收一个Mat hist(类型为CV_32F, 256x1),表示已计算好的直方图;
- 使用minMaxLoc找出最大值用于归一化;
- 计算每个 bin 的宽度;
- 循环中进行线性缩放:$ h = (\frac{v_i}{v_{max}}) \times H $;
- 构造矩形并绘制。
该方法保证了无论原始频次绝对值多大,都能适配指定画布高度。
5.2.2 高度按归一化后频次动态调整
归一化是关键预处理步骤。若跳过此步,某些高频灰度级可能超出画布范围导致溢出。OpenCV 提供 normalize 函数简化该过程:
Mat normalizedHist;
normalize(hist, normalizedHist, 0, histHeight, NORM_MINMAX, CV_32F);
上述代码将 hist 映射至 [0, histHeight] 区间内,便于后续直接取整作为像素高度。
修改后的绘图循环可省去手动比例计算:
int height = cvRound(normalizedHist.at<float>(i));
这种方式更稳健,尤其适合处理动态范围差异较大的图像。
5.2.3 防止溢出与边界裁剪处理
尽管进行了归一化,仍需考虑极端情况下的数值稳定性。例如浮点误差可能导致 height > histHeight ,从而使得 pt1.y < 0 ,引发越界访问。
为此应加入安全裁剪:
int height = min(cvRound(normalizedHist.at<float>(i)), histHeight);
int y_top = max(histHeight - height, 0);
同时检查 pt1.x 和 pt2.x 是否超出画布宽度:
if (pt2.x > histWidth) pt2.x = histWidth;
完整修正版代码如下:
for (int i = 0; i < 256; ++i) {
float binVal = normalizedHist.at<float>(i);
int height = min(static_cast<int>(binVal), histHeight);
int y_top = histHeight - height;
Point pt1(i * binWidth, y_top);
Point pt2(min((i + 1) * binWidth, histWidth), histHeight);
if (pt1.x < histWidth && pt2.x > 0) { // 确保可见
rectangle(histImg, pt1, pt2, Scalar(255, 128, 0), FILLED);
}
}
参数说明 :
-min(..., histHeight):防止高度超限;
-max(y_top, 0):防止 Y 坐标负值;
-min((i+1)*binWidth, histWidth):防止右侧越界;
- 条件判断过滤完全不可见的柱体,提升效率。
5.3 增强显示效果:网格线与坐标轴绘制
基础直方图仅展示数据趋势,缺乏参考基准。添加坐标轴、刻度线和文字标签能显著提升信息传达效率,尤其在教学、报告或调试环境中尤为重要。
5.3.1 line函数绘制X/Y轴参考线
使用 line 函数可在画布上绘制坐标轴:
// X轴(底边)
line(histImg, Point(0, histHeight), Point(histWidth, histHeight), Scalar(255, 255, 255), 1, LINE_AA);
// Y轴(左边)
line(histImg, Point(0, 0), Point(0, histHeight), Scalar(255, 255, 255), 1, LINE_AA);
说明 :
- 使用抗锯齿线型LINE_AA提升视觉质量;
- 白色线条便于在深色背景上识别。
为进一步增强可读性,可添加水平网格线:
for (int y = 0; y <= histHeight; y += 50) {
line(histImg, Point(0, y), Point(histWidth, y), Scalar(100, 100, 100), 1, LINE_AA);
}
每隔 50 像素绘制一条灰色辅助线,帮助估算柱体高度。
5.3.2 putText标注关键刻度与文字标签
使用 putText 添加文本注释:
// X轴标签
for (int i = 0; i <= 256; i += 32) {
int x_pos = i * binWidth;
if (x_pos < histWidth) {
String label = to_string(i);
Point textOrg(x_pos, histHeight + 15);
putText(histImg, label, textOrg, FONT_HERSHEY_SIMPLEX, 0.5, Scalar(255, 255, 255), 1);
}
}
// Y轴标签(频率百分比)
for (int y = 0; y <= histHeight; y += 50) {
double percent = ((double)(histHeight - y) / histHeight) * 100;
String y_label = format("%.0f%%", percent);
Point textOrg(-40, y + 4);
putText(histImg, y_label, textOrg, FONT_HERSHEY_SIMPLEX, 0.4, Scalar(255, 255, 255), 1);
}
逻辑分析 :
- X 轴每 32 灰度级标一次数字;
- Y 轴转换为相对占比形式(0%~100%);
- 文本偏移避免覆盖图形;
- 字体大小适中,颜色为白色。
5.3.3 添加标题与单位提升可读性
最后添加标题以明确图表含义:
putText(histImg, "Grayscale Histogram", Point(10, 20),
FONT_HERSHEY_TRIPLEX, 0.8, Scalar(255, 255, 255), 1);
putText(histImg, "Pixel Intensity", Point(histWidth / 2 - 60, histHeight + 35),
FONT_HERSHEY_SIMPLEX, 0.5, Scalar(200, 200, 200), 1);
putText(histImg, "Frequency", Point(-60, 15), FONT_HERSHEY_SIMPLEX, 0.5,
Scalar(200, 200, 200), 1, LINE_AA, true);
| 元素 | 内容 | 作用 |
|---|---|---|
| 主标题 | “Grayscale Histogram” | 明确主题 |
| X轴说明 | “Pixel Intensity” | 解释横轴意义 |
| Y轴说明 | “Frequency” | 解释纵轴统计量 |
graph LR
A[创建画布] --> B[绘制柱体]
B --> C[绘制坐标轴]
C --> D[添加网格线]
D --> E[标注刻度]
E --> F[插入标题与单位]
F --> G[输出最终图像]
综上所述,通过组合 rectangle 、 line 、 putText 等基础绘图函数,我们能够完全自主控制直方图的表现形式,实现媲美专业工具的可视化效果。这不仅增强了程序的实用性,也为后续开发自定义图像分析仪表盘奠定了坚实基础。
6. 直方图窗口显示与结果持久化保存
6.1 利用imshow和waitKey显示直方图窗口
在OpenCV中, imshow 和 waitKey 是图像可视化过程中不可或缺的两个函数。它们共同实现了图形界面的创建、图像内容的展示以及用户交互控制。
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
// 假设 histImage 是已绘制好的直方图 Mat 对象
Mat src = imread("input.jpg", IMREAD_GRAYSCALE);
if (src.empty()) {
cerr << "无法加载图像!" << endl;
return -1;
}
Mat histImage = Mat::zeros(400, 512, CV_8UC3); // 创建画布
// ... 此处省略直方图计算与绘制过程 ...
namedWindow("原图", WINDOW_AUTOSIZE);
namedWindow("灰度直方图", WINDOW_AUTOSIZE);
imshow("原图", src); // 显示原始图像
imshow("灰度直方图", histImage); // 显示直方图图像
waitKey(0); // 等待按键输入,0表示无限等待
-
imshow(const String& winname, InputArray mat):将Mat图像数据绑定到指定名称的窗口并渲染显示。 winname:窗口标题字符串,用于标识不同图像;-
mat:待显示的图像矩阵,支持单通道(自动转为灰度)、三通道(BGR)等格式。 -
waitKey(int delay): - 参数
delay表示等待时间(毫秒),若设为0,则程序阻塞直至任意键被按下; - 返回值为按下的ASCII码,可用于实现快捷操作(如‘q’退出);
通过如下方式可实现多窗口同步展示:
| 窗口名称 | 内容类型 | 尺寸自适应 | 用途说明 |
|---|---|---|---|
| “原图” | 源灰度图或彩色图 | WINDOW_AUTOSIZE | 观察输入图像质量 |
| “灰度直方图” | 绘制的直方图图像 | WINDOW_AUTOSIZE | 分析像素分布特性 |
| “掩码区域直方图”(可选) | ROI区域统计结果 | WINDOW_NORMAL | 对比局部与全局差异 |
此外,可以使用 moveWindow() 调整窗口位置,提升调试体验:
moveWindow("原图", 100, 100);
moveWindow("灰度直方图", 620, 100);
这种布局便于并排对比分析图像与其亮度分布特征。
6.2 图像直方图结果保存(imwrite应用)
为了使处理结果可追溯、便于报告生成或后续分析,必须将直方图图像持久化存储至磁盘。OpenCV 提供了 imwrite() 函数来完成该任务。
bool isSuccess = imwrite("histogram_output.png", histImage);
if (!isSuccess) {
cerr << "直方图保存失败!检查路径权限或磁盘空间。" << endl;
} else {
cout << "直方图已成功保存为 'histogram_output.png'" << endl;
}
支持格式与压缩参数设置
imwrite 支持多种图像格式输出,其行为受文件扩展名及附加参数影响:
| 格式 | 扩展名 | 特点 | 推荐场景 |
|---|---|---|---|
| PNG | .png |
无损压缩,支持透明通道 | 科研绘图、需高保真 |
| JPEG | .jpg/.jpeg |
有损压缩,体积小 | 报告插图、网络传输 |
| BMP | .bmp |
不压缩,文件大 | 调试中间结果 |
| TIFF | .tiff |
高动态范围支持 | 医疗影像配套 |
对于 JPEG 格式,可通过向量传递压缩质量参数:
vector<int> params;
params.push_back(IMWRITE_JPEG_QUALITY);
params.push_back(95); // 质量 0~100
imwrite("histogram.jpg", histImage, params);
自动命名与路径管理策略
为避免覆盖已有文件,建议采用时间戳进行自动命名:
#include <time.h>
char buffer[64];
time_t now = time(nullptr);
strftime(buffer, sizeof(buffer), "hist_%Y%m%d_%H%M%S.png", localtime(&now));
string filename(buffer);
imwrite(filename, histImage);
同时应确保目标目录存在,否则调用失败:
#include <direct.h> // Windows
_mkdir("output");
// 或使用 C++17 filesystem(跨平台)
// #include <filesystem> → filesystem::create_directory("output");
6.3 C++图像处理程序结构设计与调试优化
良好的模块化结构是工业级图像处理系统的基础。以下是一个推荐的主函数架构:
int main() {
Mat src = loadImage("input.jpg");
if (src.empty()) return -1;
Mat gray = convertToGray(src);
Mat histData = computeHistogram(gray);
Mat histImage = drawHistogram(histData);
displayImages(src, histImage);
saveHistogram(histImage);
waitKey(0);
return 0;
}
各函数职责明确,利于单元测试与维护。
异常处理机制与资源释放
OpenCV 的 Mat 类基于引用计数自动管理内存,但仍需注意:
- 局部作用域外不要返回 Mat 引用;
- 使用智能指针包装非Mat资源(如摄像头句柄);
- 在异常抛出前调用 destroyAllWindows() 防止窗口残留:
try {
// 处理流程
} catch (const cv::Exception& e) {
cerr << "OpenCV异常:" << e.what() << endl;
} catch (...) {
cerr << "未知异常发生!" << endl;
}
destroyAllWindows(); // 清理所有窗口
从MATLAB到C++的图像处理实现迁移思路
功能对照表
| MATLAB 函数 | C++ 对应方法 | 说明 |
|---|---|---|
imread() |
cv::imread() |
读取图像 |
rgb2gray() |
cv::cvtColor(..., COLOR_BGR2GRAY) |
灰度转换 |
imhist() |
cv::calcHist() + 手动绘图 |
直方图生成 |
figure , bar |
cv::rectangle 绘图 + imshow |
可视化替代方案 |
工程化编码转变要点
- 变量声明前置 :C++要求类型显式声明,不可动态赋值;
- 性能优先思维 :避免频繁 Mat 拷贝,使用
.clone()和.copyTo()明确意图; - 编译时错误检测强于运行时 :利用静态类型检查提前发现问题;
- 部署灵活性提升 :C++可编译为独立exe,无需解释器环境。
性能差异与实时处理优势分析
| 指标 | MATLAB | C++ (OpenCV) |
|---|---|---|
| 启动速度 | 较慢(JVM加载) | 快(本地二进制) |
| 单帧处理延迟 | ~50ms(脚本解释开销) | ~5ms(优化后) |
| 内存占用 | 高(冗余副本) | 可控(手动管理) |
| 实时视频流支持 | 一般 | 强(配合多线程) |
因此,在嵌入式视觉、工业检测等对延迟敏感的应用中,C++具备显著优势。
简介:灰度直方图是图像处理中的关键工具,用于直观展示图像中各灰度级像素的分布情况,在图像增强、对比度调整和分类等任务中具有重要作用。本文介绍如何在VC++环境下利用OpenCV库实现灰度直方图的计算与可视化,涵盖图像读取、灰度转换、直方图计算、归一化处理及图形绘制全过程。通过本项目实践,开发者可掌握C++平台下图像统计分析的基础方法,为深入学习计算机视觉打下坚实基础。

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 11
11 0
0- 0



 已为社区贡献23条内容
已为社区贡献23条内容

所有评论(0)