【无人地面车】包括UGV和UAV在内的异构混合阶多智能体系统的一致性(Matlab实现)
UGV-UAV异构混合阶系统的一致性研究是跨学科前沿领域,需综合控制理论、通信技术和人工智能。当前成果已在军事、救援等场景验证其潜力,但环境适应性、算法复杂度和标准化仍是关键瓶颈。未来需进一步探索智能优化与多模态协同,推动该系统在更复杂场景的实用化。📚2 运行结果clearclcUGV2;UGV3;UAV4;UAV5];tBegin = 0;dT = 0.01;r1 = 0.1;r2 = 0.8
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
异构混合阶多智能体系统(UGV-UAV)的一致性研究
1. 系统结构与动态特性
异构混合阶多智能体系统由不同动力学阶数的智能体组成,例如:
-
UGV(二阶系统) :通常具有位置和速度状态,动态方程为:
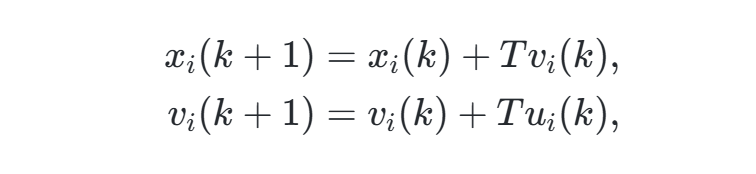
其中 xi和 vi分别为位置和速度,ui为控制输入。
-
UAV(高阶系统) :可能包含加速度或姿态动力学,需更高阶模型描述,如四旋翼无人机需考虑姿态角与推力耦合。
异构性挑战:UGV与UAV的动力学差异导致控制协议需兼容不同阶数的状态变量(如位置、速度、加速度),需通过动态耦合或分层控制实现协调。
2. 一致性算法设计方法
动态一致性协议
-
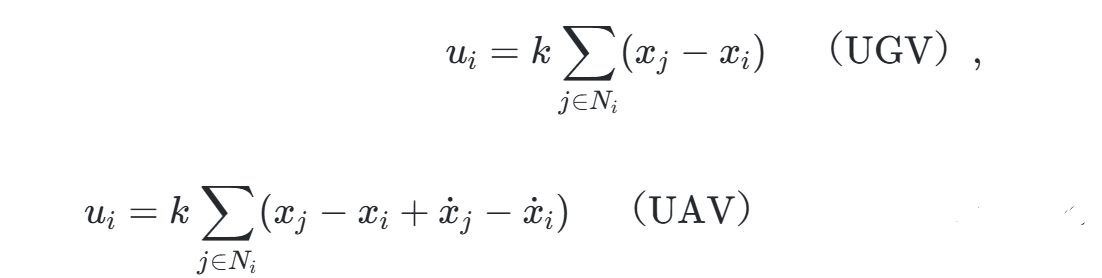
分布式控制策略:基于邻居状态反馈,设计适用于混合阶系统的控制律。例如,UGV采用速度反馈,UAV结合位置与加速度反馈:
-
自适应动态规划:针对非线性动态,结合输入输出反馈线性化和神经网络逼近,实现无模型输出一致性。
静态一致性协议
在固定时刻通过优化算法(如混合整数线性规划)调整状态,适用于任务规划场景。
优化与鲁棒性
- LQR理论:通过线性二次调节器设计最优控制协议,最小化能量消耗与状态误差。
- 容错控制:引入信任节点机制,增强系统对通信故障或恶意攻击的鲁棒性。
3. 通信协议与拓扑结构
拓扑类型
- 固定拓扑:如星型网络(中心节点协调UGV-UAV通信)或网状结构(增强冗余性)。
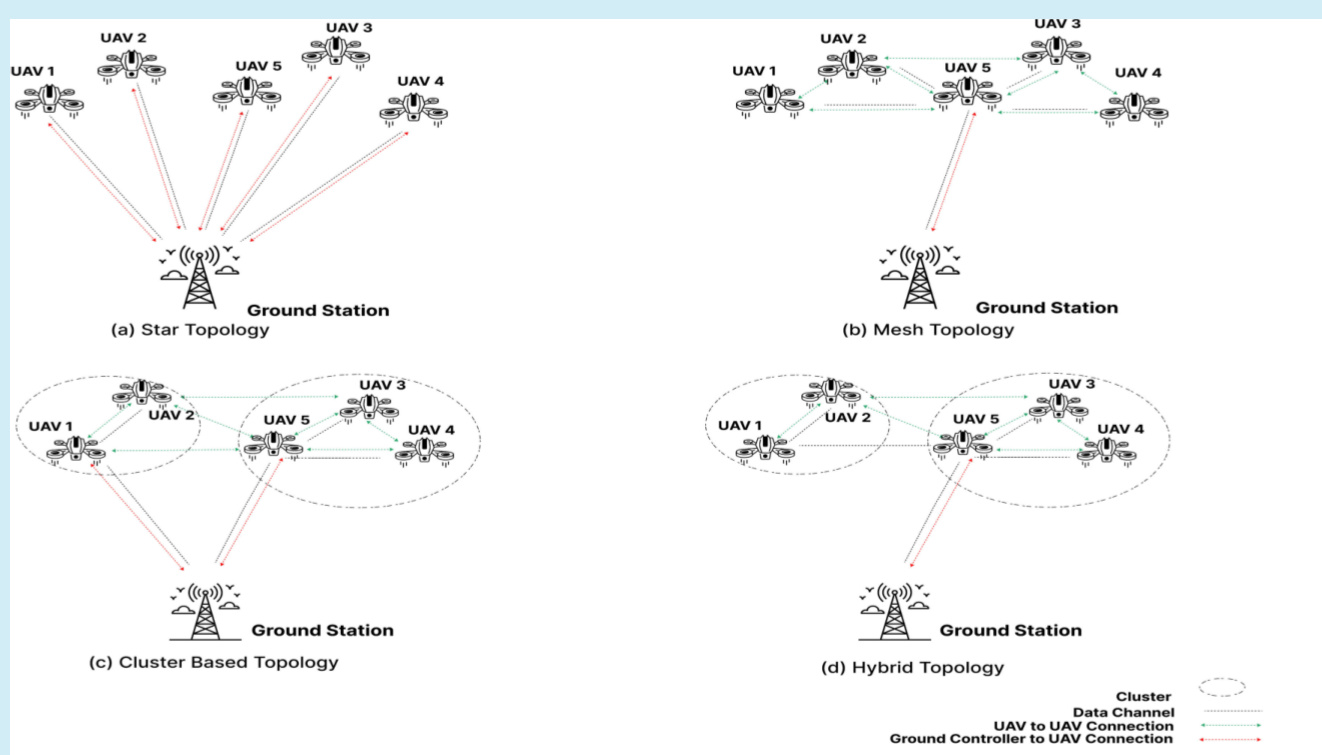
- 切换拓扑:在动态环境中,通过事件触发机制(如状态误差超阈值时通信)降低资源消耗。
通信技术
- 低延迟协议:采用UDP自适应水声通信,确保UGV-UAV在复杂环境(如水下或城市)中的实时数据传输。
- 能量感知路由:避免低电量节点成为通信瓶颈,提升网络寿命。
4. 实际应用案例
- 军事协同作战:
- UAV提供广域侦察,引导UGV编队形成安全区域或执行打击任务。
- 美军Griffon混合系统实现地面-空中快速部署,速度达20英里/小时,高度200英尺。
- 灾害救援:
- UGV进入危险区域搜救,UAV实时传输热成像数据,并通过“智能箱”嵌套设计实现无人机自主部署。
- 物流与运输:
- UGV-UAV协同优化应急资源投送路径,降低10%以上的交付时间。
5. 技术挑战与瓶颈
- 环境适应性:
- 复杂地形:UGV的移动受限(如崎岖地面),需动态路径规划与UAV的协同避障。
- 通信干扰:电磁干扰或遮挡导致拓扑切换频繁,需强化容错算法。
- 算法复杂度:
- 模型不确定性:异构智能体的参数差异(如UAV推力非线性)增加控制律设计难度。
- 计算资源限制:嵌入式平台需轻量化一致性协议(如事件触发机制)。
- 标准化与互操作性:
- 不同厂商的UGV-UAV系统需统一通信协议(如ROS 2中间件),以实现跨平台协同。
6. 未来研究方向
- 有限时间一致性:结合双曲正切函数等非线性控制方法,实现快速收敛。
- 人工智能融合:利用深度强化学习优化异构系统的动态协同策略。
- 多物理场耦合:研究UGV-UAV在电磁、声学等多域环境中的协同感知与控制。
总结
UGV-UAV异构混合阶系统的一致性研究是跨学科前沿领域,需综合控制理论、通信技术和人工智能。当前成果已在军事、救援等场景验证其潜力,但环境适应性、算法复杂度和标准化仍是关键瓶颈。未来需进一步探索智能优化与多模态协同,推动该系统在更复杂场景的实用化。
📚2 运行结果
主函数部分代码:
clear
clc
%% Laplacian Matrix
L = [2 -1 -1 0 0
-1 3 -1 -1 0
-1 -1 3 0 -1
0 -1 0 2 -1
0 0 -1 -1 2];
%% Initial States
% PositionX, PositionY, VeloctiyX, VelocityY (4)
% UGV1 = [90, 50, 10, 10]';
% UGV2 = [65, 10, 10, 10]';
% UGV3 = [55, 20, 10, 10]';
% PositionX, PositionY, PositionZ, VeloctiyX, VelocityY, VelocityZ,
% Pitch, Phi, Psi, dPitch, dPhi, dPsi (12)
% UAV4 = [25, 10, 10, 10, 10, 00, 10, 10, 00, 10, 10, 00]';
% UAV5 = [10, 30, 10, 10, 10, 00, 10, 10, 00, 10, 10, 00]';
% X0 = [UGV1; UGV2; UGV3; UAV4; UAV5];
P1X(1,1) = 90; P1Y(1,1) = 50; V1X(1,1) = 0; V1Y(1,1) = 15;
P2X(1,1) = 65; P2Y(1,1) = 10; V2X(1,1) = 10; V2Y(1,1) = 0;
P3X(1,1) = 55; P3Y(1,1) = 20; V3X(1,1) = 20; V3Y(1,1) = 15;
P4X(1,1) = 30; P4Y(1,1) = 50; P4Z(1,1) = 50;
V4X(1,1) = 00; V4Y(1,1) = 10; V4Z(1,1) = 0;
gtheta4(1,1) = 10; gphi4(1,1) = 30; gpsi4(1,1) = 0;
gdtheta4(1,1) = 00; gdphi4(1,1) = 00; gdpsi4(1,1) = 0;
P5X(1,1) = 90; P5Y(1,1) = 30; P5Z(1,1) = 50;
V5X(1,1) = 00; V5Y(1,1) = 10; V5Z(1,1) = 0;
gtheta5(1,1) = 20; gphi5(1,1) = 15; gpsi5(1,1) = 00;
gdtheta5(1,1) = 00; gdphi5(1,1) = 00; gdpsi5(1,1) = 00;
% Time parameters
tBegin = 0;
tFinal = 50;
dT = 0.01;
times = (tFinal-tBegin)/dT;
time(1,1) = 0;
%% Calculate
r1 = 0.1;
r2 = 0.8;
r3 = 4.0;
r4 = 1.5;
global protocol
protocol = 1; % (1:Dynamic/2:Static)
for i=1:times
time(i+1,1) = time(i,1) + dT;
if protocol == 1
u1x = r1*( (P2X(i,:)-P1X(i,:))+(P3X(i,:)-P1X(i,:)) ) + r2*( (V2X(i,:)-V1X(i,:))+(V3X(i,:)-V1X(i,:)) );
u2x = r1*( (P1X(i,:)-P2X(i,:))+(P3X(i,:)-P2X(i,:)+(P4X(i,:)-P2X(i,:))) ) + r2*( (V1X(i,:)-V2X(i,:))+(V3X(i,:)-V2X(i,:))+(V4X(i,:)-V2X(i,:)) );
u3x = r1*( (P1X(i,:)-P3X(i,:))+(P2X(i,:)-P3X(i,:)+(P5X(i,:)-P3X(i,:))) ) + r2*( (V1X(i,:)-V3X(i,:))+(V2X(i,:)-V3X(i,:))+(V5X(i,:)-V3X(i,:)) );
u4x = r1*( (P2X(i,:)-P4X(i,:))+(P5X(i,:)-P4X(i,:)) ) + r2*( (V2X(i,:)-V4X(i,:))+(V5X(i,:)-V4X(i,:)) ) + r3*( -gtheta4(i,:)) + r4*( -gdtheta4(i,:));
u5x = r1*( (P3X(i,:)-P5X(i,:))+(P4X(i,:)-P5X(i,:)) ) + r2*( (V3X(i,:)-V5X(i,:))+(V4X(i,:)-V5X(i,:)) ) + r3*( -gtheta5(i,:)) + r4*( -gdtheta5(i,:));
u1y = r1*( (P2Y(i,:)-P1Y(i,:))+(P3Y(i,:)-P1Y(i,:)) ) + r2*( (V2Y(i,:)-V1Y(i,:))+(V3Y(i,:)-V1Y(i,:)) );
u2y = r1*( (P1Y(i,:)-P2Y(i,:))+(P3Y(i,:)-P2Y(i,:)+(P4Y(i,:)-P2Y(i,:))) ) + r2*( (V1Y(i,:)-V2Y(i,:))+(V3Y(i,:)-V2Y(i,:))+(V4Y(i,:)-V2Y(i,:)) );
u3y = r1*( (P1Y(i,:)-P3Y(i,:))+(P2Y(i,:)-P3Y(i,:)+(P5Y(i,:)-P3Y(i,:))) ) + r2*( (V1Y(i,:)-V3Y(i,:))+(V2Y(i,:)-V3Y(i,:))+(V5Y(i,:)-V3Y(i,:)) );
u4y = r1*( (P2Y(i,:)-P4Y(i,:))+(P5Y(i,:)-P4Y(i,:)) ) + r2*( (V2Y(i,:)-V4Y(i,:))+(V5Y(i,:)-V4Y(i,:)) ) + r3*( -gphi4(i,:)) + r4*( -gdphi4(i,:));
u5y = r1*( (P3Y(i,:)-P5Y(i,:))+(P4Y(i,:)-P5Y(i,:)) ) + r2*( (V3Y(i,:)-V5Y(i,:))+(V4Y(i,:)-V5Y(i,:)) ) + r3*( -gphi5(i,:)) + r4*( -gdphi5(i,:));
end
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]石哲鑫,冯永进,于江龙,等.无人机-无人车跨域编队跟踪的分布式博弈策略[J].无人系统技术,2024,7(02):28-38.DOI:10.19942/j.issn.2096-5915.2024.02.14.
[2]王浩淼,袁莞迈,马可,等.基于联盟博弈的无人机/无人车异构集群验证[J].工程科学学报,2024,46(07):1207-1215.DOI:10.13374/j.issn2095-9389.2023.10.25.002.
🌈4 Matlab代码实现


火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 23
23 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)