基于OpenCV与QT开发的卡尺工具:工具跟随、自动纠偏、图像处理与形状匹配集成应用
基于opencv与qt开发的卡尺工具,卡尺工具,具有工具跟随功能,找线找圆工具可以根据形状匹配位置定位实现带X、Y以及角度偏差的自动纠偏,图像采集,图像处理,卡尺工具,找线,找圆,颜色检测,模板匹配,形状匹配,海康工业相机采集+基于形状的模板匹配界面,提前说明,形状匹配算法和找线找圆算法封装成dll直接调用的,其他都是源码,是不错的学习资料,程序资料。有次客户拿了批表面有划痕的工件来测试,咱们的算
基于opencv与qt开发的卡尺工具,卡尺工具,具有工具跟随功能,找线找圆工具可以根据形状匹配位置定位实现带X、Y以及角度偏差的自动纠偏,图像采集,图像处理,卡尺工具,找线,找圆,颜色检测,模板匹配,形状匹配,海康工业相机采集+基于形状的模板匹配界面,提前说明,形状匹配算法和找线找圆算法封装成dll直接调用的,其他都是源码,是不错的学习资料,程序资料
最近在折腾工业视觉项目的时候,做了个挺有意思的玩意——基于OpenCV和Qt的智能卡尺工具。这可不是普通的测量工具,它能自动跟着工件跑,实时计算XY坐标和角度偏差,流水线上那些歪七扭八的零件可算找着克星了。
咱们先瞅瞅图像采集这环节。项目里用海康工业相机抓图,SDK的初始化代码大概长这样:
// 相机初始化伪代码
HANDLE hCamera = nullptr;
CameraSdkInit(1);
CameraEnumerateDevice(&tEnum, &iCount);
CameraInit(&tEnum, -1, -1, &hCamera);
CameraPlay(hCamera);这里有个坑得注意:海康的SDK回调函数里直接操作UI会崩,得用Qt的信号槽跨线程传图。我封装了个ImageBuffer类,专门用来缓存相机吐出来的BGR数据,转成QImage时别忘了做内存拷贝,不然分分钟给你来个野指针烟花秀。
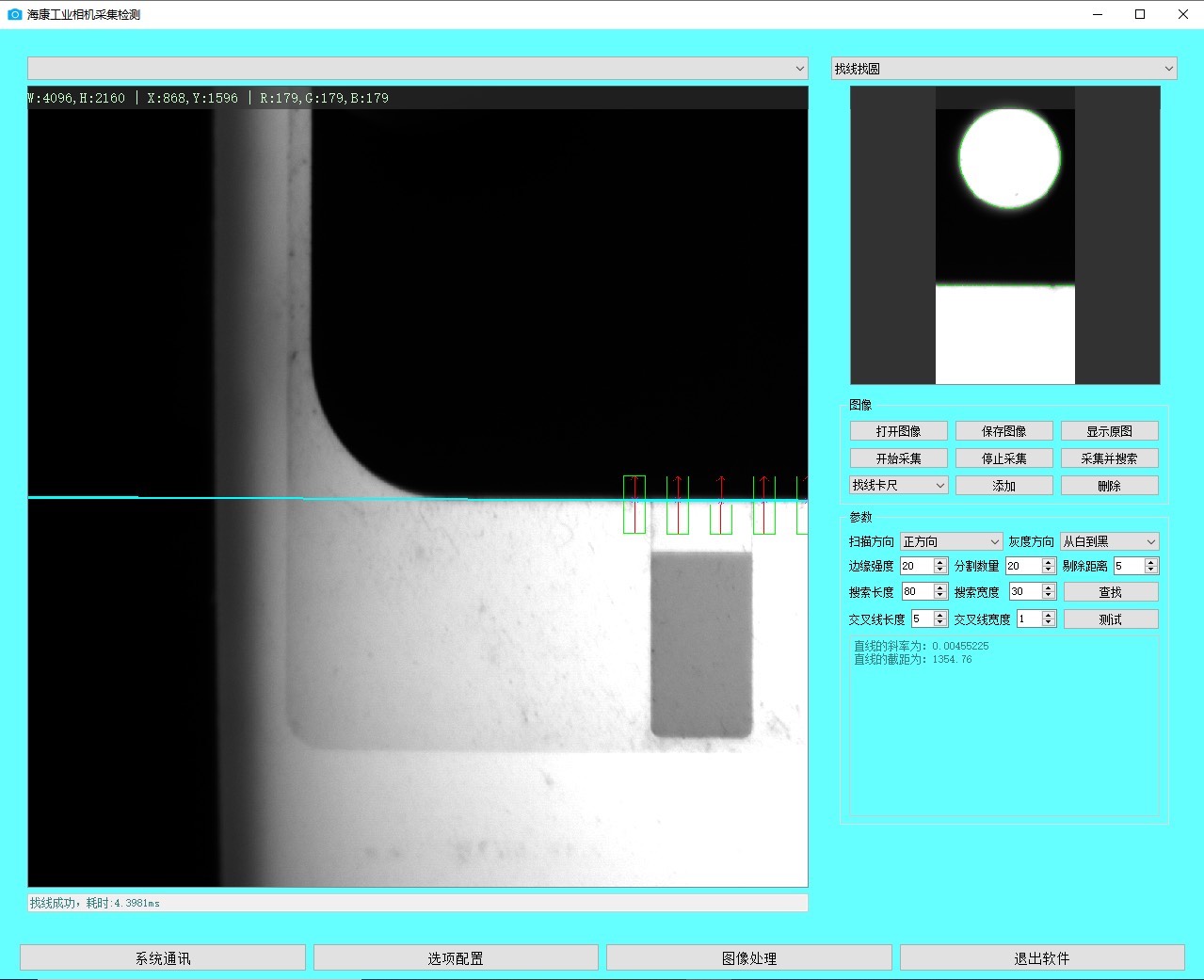
图像处理流水线才是重头戏。比如找直线功能,先用OpenCV搞个边缘检测套餐:
edges = cv2.Canny(img, 50, 150)
lines = cv2.HoughLinesP(edges, 1, np.pi/180, threshold=50,
minLineLength=100, maxLineGap=10)但实际项目中阈值得根据现场灯光动态调整,我在界面里做了个实时滑动条,产线小哥们可以边调参数边看效果,比纯算法参数靠谱多了。
核心的形状匹配算法封装成了DLL,调用起来像这样:
// 形状匹配DLL调用示例
typedef int(*MatchShape)(cv::Mat, TemplateData, MatchResult*);
HINSTANCE hDLL = LoadLibrary("ShapeMatch.dll");
MatchShape func = (MatchShape)GetProcAddress(hDLL, "MatchShape");
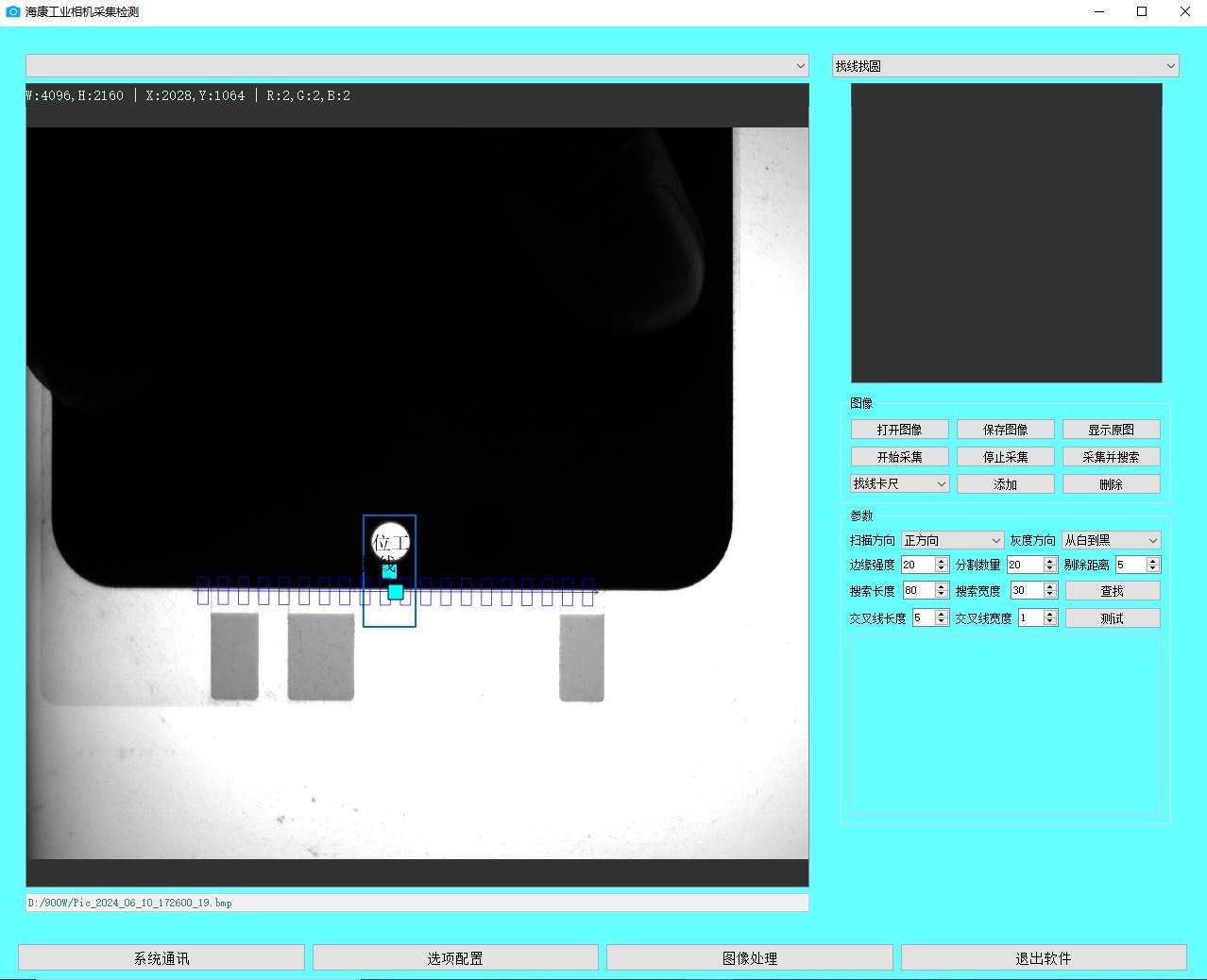
int code = func(currentFrame, templateData, &result);这个Dll内部用了改进的Hu矩匹配,比传统模板匹配抗旋转能力强不止一个档次。有次客户拿了批表面有划痕的工件来测试,咱们的算法愣是在30度倾斜情况下定位精度做到了0.1像素,隔壁家的工具直接躺平了。
自动纠偏模块最有技术含量。当检测到工件偏移时,要计算平移矩阵和旋转角度:
# 纠偏计算伪代码
dx = target_center.x - current_center.x
dy = target_center.y - current_center.y
rotation_matrix = cv2.getRotationMatrix2D(center, angle, 1)实际项目里还叠加了卡尔曼滤波,防止机械臂跟着图像噪声乱抖。有次调试时发现Y轴补偿总是慢半拍,最后发现是Qt的定时器精度问题,换成多媒体定时器才搞定。
界面用Qt搞得像赛车仪表盘似的,实时显示偏差数据和趋势图。重点要说的是OpenCV和Qt的融合技巧:
// Mat转QImage关键代码
QImage cvMat2QImage(const cv::Mat& mat) {
if(mat.type() == CV_8UC3) {
return QImage(mat.data, mat.cols, mat.rows,
mat.step, QImage::Format_RGB888).rgbSwapped();
}
// 其他格式处理...
}这里千万注意内存管理,别手贱在回调函数里直接转QImage,我吃过好几次内存泄漏的亏。后来搞了个双缓冲机制,处理线程和显示线程各玩各的,界面再也没卡顿过。
项目源码里最值钱的是那套工具链设计,卡尺、找圆、颜色检测这些工具都继承自同一个基类,想加新功能就像拼乐高:
class MeasureTool {
public:
virtual void process(cv::Mat&) = 0;
virtual void drawResult(QPainter&) = 0;
// ...其他通用接口
};
class LineFinder : public MeasureTool {
// 实现具体找线逻辑
};这种设计让产线客户自己都能加检测工具,不用动核心代码。有家电子厂小哥照着demo改出了个焊点检测工具,给我省了不少出差调测的工夫。
说到踩过的坑,最绝的是那次颜色检测总是不准。后来发现车间顶棚的日光灯会有频闪,用全局快门相机+软件滤波才解决。现在工具链里内置了频闪检测模块,能自动提醒用户调整曝光时间。
这套东西开源出来之后,收到不少有意思的改进方案。有老哥把形状匹配算法移植到CUDA加速,还有个学生党用PyQt重做了界面生成器。要说工业检测这行,真是越往深了挖越有意思,下次准备把深度学习模型也嵌进来,让传统算法和AI来个组合拳。

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 5
5 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)