基于CasADi工具箱的MPC轨迹跟踪运动控制器设计入门指南
基于CasADi工具箱的模型预测控制求解示例学习,适合入门MPC轨迹跟踪运动控制器设计。带录制视频讲解与配套MATLAB,python脚本文件,讲义文件等。将MPC转换为非线性规划(NLP)问题的求解,并基于多重打靶法Multiple shooting将模型预测控制问题(MPC)转化为一般的NLP问题,进而利用CasADi工具箱对优化问题求解。1.控制模型离散化利用欧拉公式或其他数值离散化方法,采
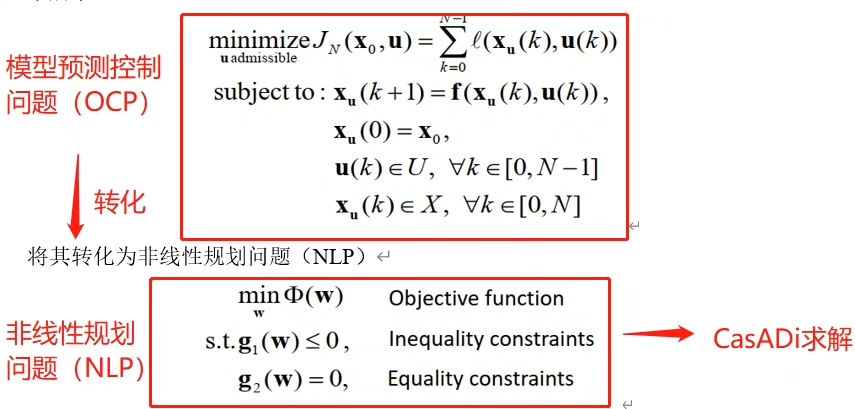
基于CasADi工具箱的模型预测控制求解示例学习,适合入门MPC轨迹跟踪运动控制器设计。 带录制视频讲解与配套MATLAB,python脚本文件,讲义文件等。 将MPC转换为非线性规划(NLP)问题的求解,并基于多重打靶法Multiple shooting将模型预测控制问题(MPC)转化为一般的NLP问题,进而利用CasADi工具箱对优化问题求解。 1.控制模型离散化 利用欧拉公式或其他数值离散化方法,采用一定间隔的离散时间,对连续模型离散化。 2.优化问题转化 将MPC优化问题转化为NLP问题。 MPC的最优控制(OCP)的表达形式如下所示: 3.利用CasADi,完成对NLP问题的求解。
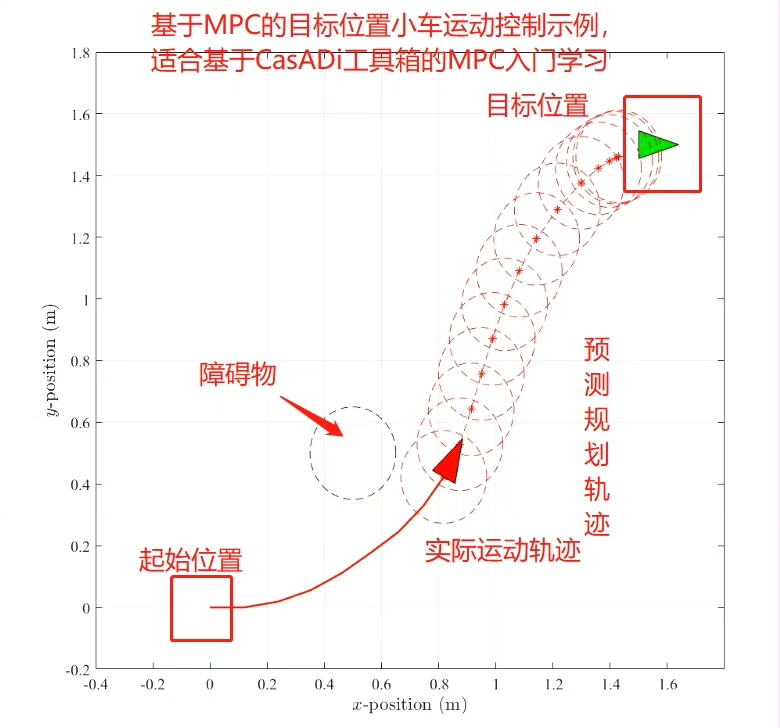
在自动驾驶和机器人等众多领域,模型预测控制(MPC)凭借其出色的性能,成为设计轨迹跟踪运动控制器的热门选择。今天就来和大家分享基于CasADi工具箱的MPC轨迹跟踪运动控制器设计示例学习,这个过程中还贴心准备了录制视频讲解,以及配套的MATLAB、Python脚本文件和讲义文件,非常适合入门。
MPC到NLP的转变
MPC本质上是求解一个最优控制问题(OCP),但为了方便求解,我们通常把它转化为非线性规划(NLP)问题。这里用到了多重打靶法(Multiple shooting),这种方法将模型预测控制问题(MPC)转化为一般的NLP问题,然后借助CasADi工具箱就能轻松求解优化问题啦。
控制模型离散化
实际应用中,我们的系统大多是连续的,但计算机处理需要离散的数据,所以要对连续模型离散化。常用的方法比如欧拉公式,当然也可以用其他数值离散化方法。
以一个简单的一阶系统 $\dot{x} = -ax + bu$ 为例,采用欧拉向前离散化,离散时间间隔设为 $T_s$。
连续状态方程为:
\[ \dot{x}(t) = -ax(t) + bu(t) \]

离散化后:
\[ x{k + 1} = xk + Ts(-axk + bu_k) \]
用Python代码简单示意离散化过程:
import numpy as np
# 定义参数
a = 1.0
b = 1.0
Ts = 0.1 # 离散时间间隔
# 初始状态
x_k = 0.0
u_k = 1.0
# 离散化更新状态
x_k_plus_1 = x_k + Ts * (-a * x_k + b * u_k)
print("离散化后的状态 x_{k+1}:", x_k_plus_1)这里就是根据欧拉公式实现了简单的离散化,每次按照固定的时间间隔 Ts 更新系统状态。
优化问题转化
MPC的最优控制(OCP)有其特定的表达形式。一般来说,OCP要最小化一个代价函数,同时满足一系列约束条件。把MPC优化问题转化为NLP问题,核心就是将这些代价函数和约束用NLP能处理的形式表达出来。
假设MPC的代价函数为:
\[ J = \sum{k = 0}^{N - 1} (xk - x{ref,k})^2 + \rho uk^2 \]
其中,$x_{ref,k}$ 是参考状态,$\rho$ 是控制输入惩罚因子,$N$ 是预测时域。
状态转移方程作为约束:
\[ x{k + 1} = f(xk, u_k) \]
这样就把MPC的OCP转化为了NLP问题的形式,CasADi工具箱就可以大展身手啦。
利用CasADi求解NLP问题
CasADi是一个用于数值计算和优化的开源软件包,功能十分强大。下面用MATLAB代码示例如何利用CasADi求解转化后的NLP问题。
% 导入CasADi相关函数
import casadi.*
% 定义参数
N = 10; % 预测时域
rho = 0.1; % 控制输入惩罚因子
Ts = 0.1; % 离散时间间隔
% 定义状态和控制变量
x = SX.sym('x', 1); % 状态变量
u = SX.sym('u', 1); % 控制变量
% 定义状态转移函数
f = @(x, u) x + Ts * (-x + u);
% 定义代价函数
J = 0;
x_k = x;
for k = 1:N
J = J + (x_k - 1)^2 + rho * u^2; % 参考状态设为1
x_k = f(x_k, u);
end
% 定义优化变量
opt_variables = [x; repmat(u, N, 1)];
% 定义约束
g = [];
x_k = x;
for k = 1:N
g = [g; x_k - f(x_k, u)];
x_k = f(x_k, u);
end
% 定义优化问题
prob = struct('f', J, 'x', opt_variables, 'g', g);
% 选择求解器
solver = nlpsol('solver', 'ipopt', prob);
% 初始猜测值
x0 = [0; repmat(0, N, 1)];
% 求解
sol = solver('x0', x0);在这段代码里,我们先定义了参数、状态和控制变量,构建了状态转移函数和代价函数。然后把优化变量和约束整合起来定义优化问题,选择 ipopt 求解器求解。通过这样的步骤,就利用CasADi完成了NLP问题的求解,进而实现MPC轨迹跟踪。
总之,通过控制模型离散化、优化问题转化以及CasADi求解这一系列步骤,我们就能实现基于CasADi工具箱的MPC轨迹跟踪运动控制器设计,希望大家能在这个过程中顺利入门MPC设计。配合我们提供的视频、脚本和讲义,相信学习效果会更好哦!

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 37
37 0
0- 0



 已为社区贡献28条内容
已为社区贡献28条内容

所有评论(0)