最近在折腾汽车电子标定,发现不少团队卡在AUTOSAR工具链这个环节。手头刚好有个开源的XCP协议栈方案,实测能绕过工具链直接玩转标定,分享几个实用技巧
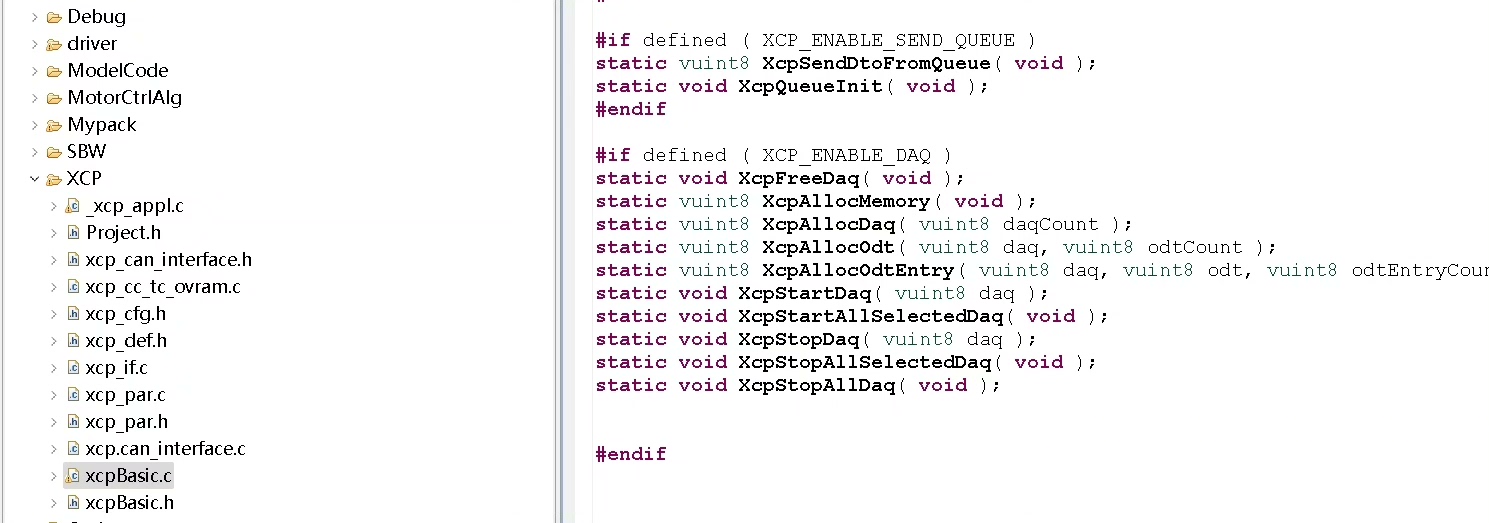
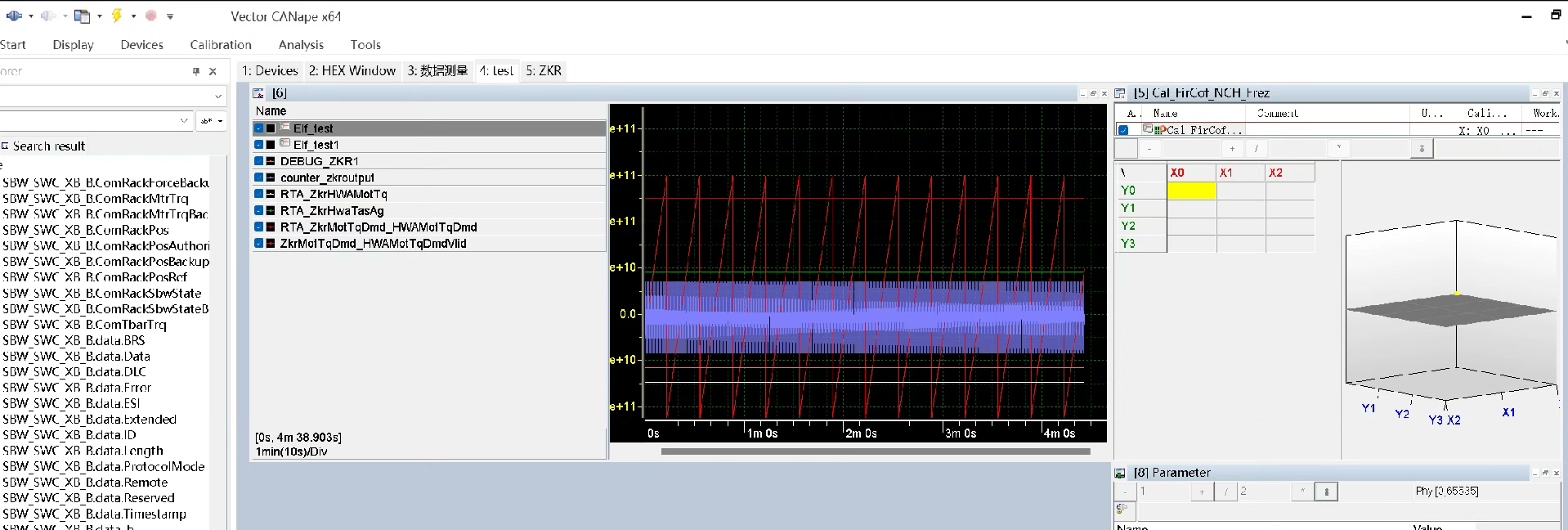
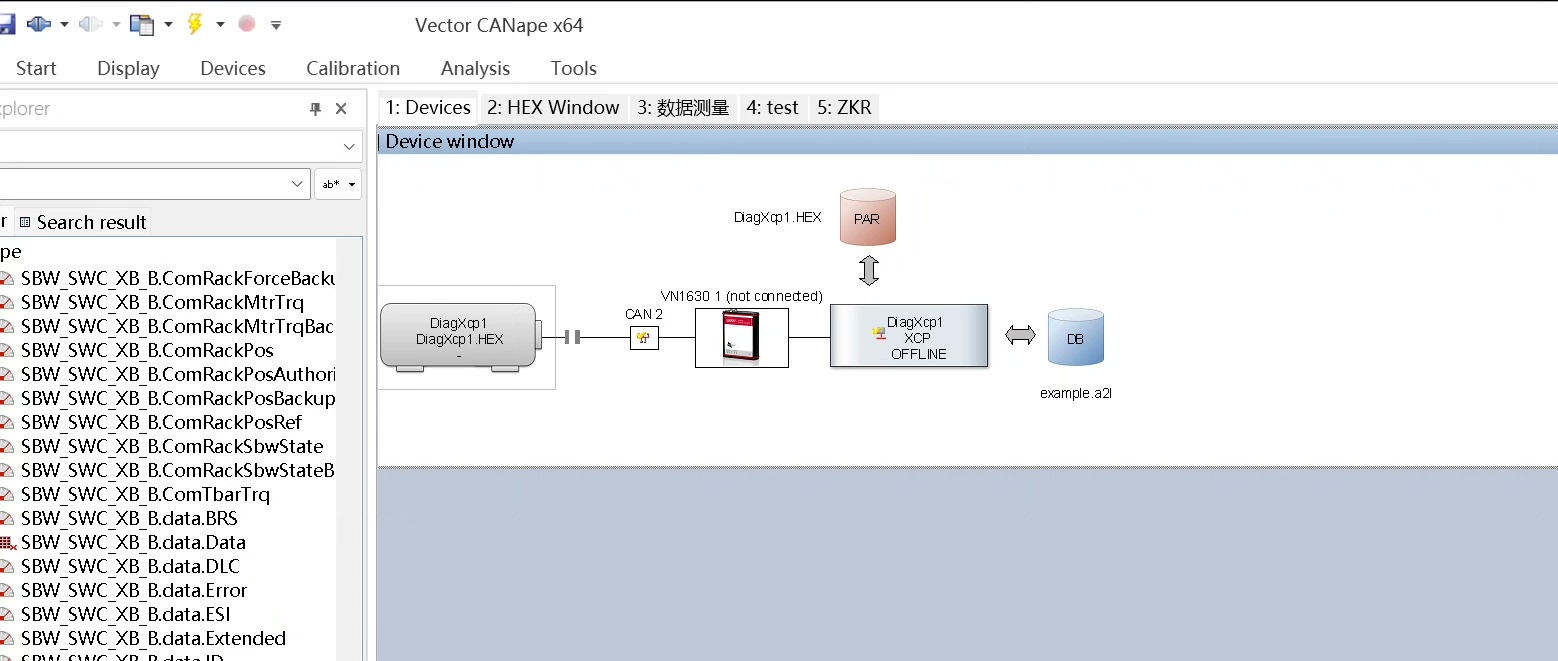
XCP标定协议栈源码,适合无autosar工具链,需要标定的场景,支持CAN,CANFD,最多支持64字节长度,可以提供适配服务,包括:协助客户完成ape上位机和下位机联调,下位适配不同的MCU型号,默认支持英飞凌TC3XX系列和NXP S32K1XX系列芯片。数据包处理模块支持动态分片,实测传64字节的标定参数时,底层会自动拆包发送。这个协议栈最大的优势是自带硬件抽象层。遇到最奇葩的案例是某客户
XCP标定协议栈源码,适合无autosar工具链,需要标定的场景,支持CAN,CANFD,最多支持64字节长度,可以提供适配服务,包括:协助客户完成ape上位机和下位机联调,下位适配不同的MCU型号,默认支持英飞凌TC3XX系列和NXP S32K1XX系列芯片。
这个协议栈最大的优势是自带硬件抽象层。比如处理CAN帧类型判断,直接通过硬件寄存器标志位自动区分标准帧和CANFD,不用手动改配置:
uint8_t xcpCanDetectFrameType(CAN_Type *base)
{
// 通过硬件寄存器判断帧类型
if (base->MB[0].CS & CAN_CS_IDE_MASK) {
return kXCP_CANFD;
}
return kXCP_CAN20;
}数据包处理模块支持动态分片,实测传64字节的标定参数时,底层会自动拆包发送。这里有个坑要注意——时间戳处理必须用硬件定时器,软件计时在高速传输时会丢包:
void XCP_PacketProcessor(uint8_t *data, uint16_t len)
{
static uint8_t chunkBuffer[64];
static uint16_t receivedBytes = 0;
// 硬件定时器获取精准时间戳
uint32_t currentTime = TIMER_GetTimeMicroseconds();
memcpy(&chunkBuffer[receivedBytes], data, len);
receivedBytes += len;
if (receivedBytes >= sizeof(chunkBuffer)) {
XCP_HandlePayload(chunkBuffer, currentTime);
receivedBytes = 0;
}
}适配不同MCU主要得改三个地方:时钟配置、CAN驱动、内存映射。以切换S32K144到TC397为例,改下DMA触发方式就搞定。这里分享个自动检测芯片型号的宏:
#if defined(__S32K148__)
#define XCP_PLATFORM_GPIO_INIT() GPIO_PortInit(GPIOA, 0xFF)
#elif defined(__TC397__)
#define XCP_PLATFORM_GPIO_INIT() IfxPort_setPinModeOutput(IfxPort_P34_0, IfxPort_OutputMode_pushPull)
#endif实际项目里遇到过CANFD的BRS位配置问题。协议栈里有个隐藏参数要改,否则英飞凌的TCU模块会报错:
void XCP_CanFDConfig(CAN_Type *base)
{
base->CBT = CAN_CBT_BRP(5) // 分频系数
| CAN_CBT_EPSEG(7)
| CAN_CBT_EPROPSEG(6);
base->FDCTRL |= CAN_FDCTRL_FDRATE_MASK; // 必须设置速率切换标志位
}上位机对接推荐用Python搞自动化脚本。分享个快速测试APEX通信的代码片段:
from pyxcp import TransportCan
dev = TransportCan(channel='can0', bustype='socketcan')
dev.connect()
# 暴力测试64字节传输
payload = bytes([x%256 for x in range(64)])
resp = dev.shortUpload(0x800000, 64, payload)
print(f"Received {len(resp)} bytes checksum: {sum(resp)}")遇到最奇葩的案例是某客户在STM32F4上死活调不通,最后发现是DMA对齐问题——他们的参数结构体没做4字节对齐。加了attribute((aligned(4)))瞬间解决。所以协议栈里强制做了内存对齐检查:
typedef struct __attribute__((packed)) {
uint8_t pid;
uint32_t addr;
uint8_t data[64];
} XCP_Packet;
static_assert(sizeof(XCP_Packet) == 69, "XCP packet structure alignment error!");现在这套方案已经跑在十几个量产项目上,从雨刷电机到BMS都有。需要定制化的话,改改硬件抽象层和上位机配置脚本,基本两周就能完成移植。比起动辄几十万的AUTOSAR工具链,省下来的钱够加半年鸡腿了。

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 3
3 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)