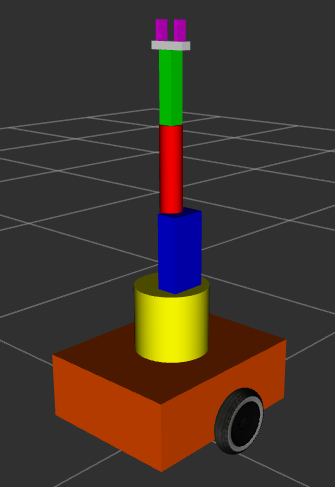
给机械臂添加移动底盘
·
1、完整代码:
<?xml version="1.0"?>
<robot name="myrobot" xmlns:xacro="http://www.ros.org/wiki/xacro">
<!-- include arm xacro file -->
<xacro:include filename="$(find myrobot_description)/urdf/myarm.xacro" />
<!-- Constants -->
<xacro:property name="car_length" value="0.5" />
<xacro:property name="car_width" value="0.4" />
<xacro:property name="car_height" value="0.18" />
<link name="base_footprint"/>
<joint name="base_joint" type="fixed">
<origin xyz="0 0 ${car_height/2+0.05}" rpy="0 0 0"/>
<parent link="base_footprint"/>
<child link="base_link"/>
</joint>
<link name="base_link">
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<box size="${car_length} ${car_width} ${car_height}"/>
</geometry>
<material name="orange" />
</visual>
<visual name="front_cast">
<origin rpy="0 0 0" xyz="0.17 0 -${car_height/2+0.05/2}"/>
<geometry>
<sphere radius="0.0249"/>
</geometry>
<material name="light_grey" />
</visual>
<visual name="back_cast">
<origin rpy="0 0 0" xyz="-0.17 0 -${car_height/2+0.05/2}"/>
<geometry>
<sphere radius="0.0249"/>
</geometry>
<material name="light_grey" />
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<box size="${car_length} ${car_width} ${car_height}"/>
</geometry>
</collision>
<collision name="front_cast">
<origin rpy="0 0 0" xyz="0.17 0 -${car_height/2+0.05/2}"/>
<geometry>
<sphere radius="0.0249"/>
</geometry>
</collision>
<collision name="back_cast">
<origin rpy="0 0 0" xyz="-0.17 0 -${car_height/2+0.05/2}"/>
<geometry>
<sphere radius="0.0249"/>
</geometry>
</collision>
<box_inertial_matrix m="2.0" l="${car_length}" w="${car_width}" h="${car_height}"/>
</link>
<link name="left_wheel">
<collision name="collision">
<origin xyz="0 0 0" rpy="${M_PI_2} 0 0"/>
<geometry>
<cylinder radius="0.095" length="0.05"/>
</geometry>
</collision>
<visual name="left_wheel_visual">
<origin xyz="0 0 0" rpy="0 0 -${M_PI_2}"/>
<geometry>
<mesh filename="package://myrobot_description/meshes/wheel.dae" />
</geometry>
</visual>
<cylinder_inertial_matrix m="1.0" r="0.095" l="0.05"/>
</link>
<joint name="left_wheel_joint" type="continuous">
<axis xyz="0 1 0" rpy="0 0 0"/>
<origin xyz="0 ${car_width/2+0.03} 0.095" rpy="0 0 0"/>
<parent link="base_footprint"/>
<child link="left_wheel"/>
<limit effort="6" velocity="1.0"/>
<joint_properties damping="0.0" friction="0.0"/>
</joint>
<link name="right_wheel">
<collision name="collision">
<origin xyz="0 0 0" rpy="-${M_PI_2} 0 0"/>
<geometry>
<cylinder radius="0.095" length="0.05"/>
</geometry>
</collision>
<visual name="right_wheel_visual">
<origin xyz="0 0 0" rpy="0 0 ${M_PI_2}"/>
<geometry>
<mesh filename="package://myrobot_description/meshes/wheel.dae" />
</geometry>
</visual>
<cylinder_inertial_matrix m="1.0" r="0.095" l="0.05"/>
</link>
<joint name="right_wheel_joint" type="continuous">
<axis xyz="0 1 0" rpy="0 0 0"/>
<origin xyz="0 -${car_width/2+0.03} 0.095" rpy="0 0 0"/>
<parent link="base_footprint"/>
<child link="right_wheel"/>
<limit effort="6" velocity="1.0"/>
<joint_properties damping="0.0" friction="0.0"/>
</joint>
<joint name="arm_base_joint" type="fixed">
<parent link="base_link"/>
<child link="arm_base_link"/>
<origin rpy="0 0 0" xyz="0 0 ${car_height/2}"/>
</joint>
</robot>
右轮设置:
<link name="right_wheel">
<collision name="collision">
<origin xyz="0 0 0" rpy="-${M_PI_2} 0 0"/>
<geometry>
<cylinder radius="0.095" length="0.05"/>
</geometry>
</collision>
<visual name="right_wheel_visual">
<origin xyz="0 0 0" rpy="0 0 ${M_PI_2}"/>
<geometry>
<mesh filename="package://myrobot_description/meshes/wheel.dae" />
</geometry>
</visual>
<cylinder_inertial_matrix m="1.0" r="0.095" l="0.05"/>
</link><mesh filename="package://myrobot_description/meshes/wheel.dae" /> 车轮的模型
下面是底盘base_link与arm_base_link的关节。
<joint name="arm_base_joint" type="fixed">
<parent link="base_link"/>
<child link="arm_base_link"/>
<origin rpy="0 0 0" xyz="0 0 ${car_height/2}"/>
</joint>launch文件:
<launch>
<arg name="model" />
<!-- 加载机器人模型参数 -->
<param name="robot_description" command="$(find xacro)/xacro $(find myrobot_description)/urdf/myrobot.xacro" />
<!-- 运行joint_state_publisher_gui节点,发布机器人的关节状态 -->
<node name="joint_state_publisher_gui" pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" />
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<!-- 运行rviz可视化界面 -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find myrobot_description)/rviz/robot.rviz" required="true" />
</launch>

中国智能体开发者社区,聚焦智能体与大模型开发,提供前沿资讯、实用工具链、开源项目及行业案例。通过技术沙龙、开发者大赛等活动,促进经验交流与协作,助力开发者快速构建创新智能应用。
更多推荐


 3
3 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)