MoveIt 学习笔记(2)_实操
Setup Assistant 会根据用户导入的机器人 URDF 模型生成 SRDF(Semantic Robot Description Format) 文件,从而创建一个 MoveIt 配置的功能包,完成机器人配置、可视化、仿真等工作。)这个时候我们已经可以确认,MoveIt 已经配置完成且可以正常运行!1. 使用 Setup Assistant 工具完成配置工作;MoveIt Setup A
假设已经创建好了自己的机器人 URDF 模型。
1. 使用 Setup Assistant 工具完成配置工作;
Setup Assistant 会根据用户导入的机器人 URDF 模型生成 SRDF(Semantic Robot Description Format) 文件,从而创建一个 MoveIt 配置的功能包,完成机器人配置、可视化、仿真等工作。
首先启动:
roscore另开一个 terminal ,输入:
rosrun moveit_setup_assistant moveit_setup_assistant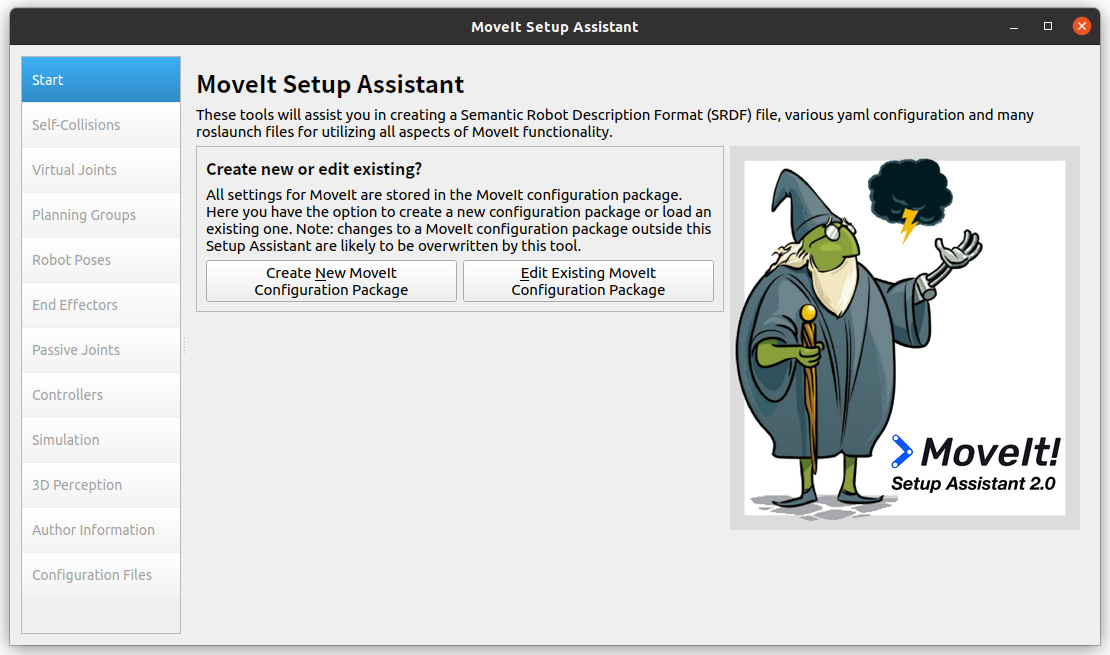
MoveIt Setup Assistant 启动界面
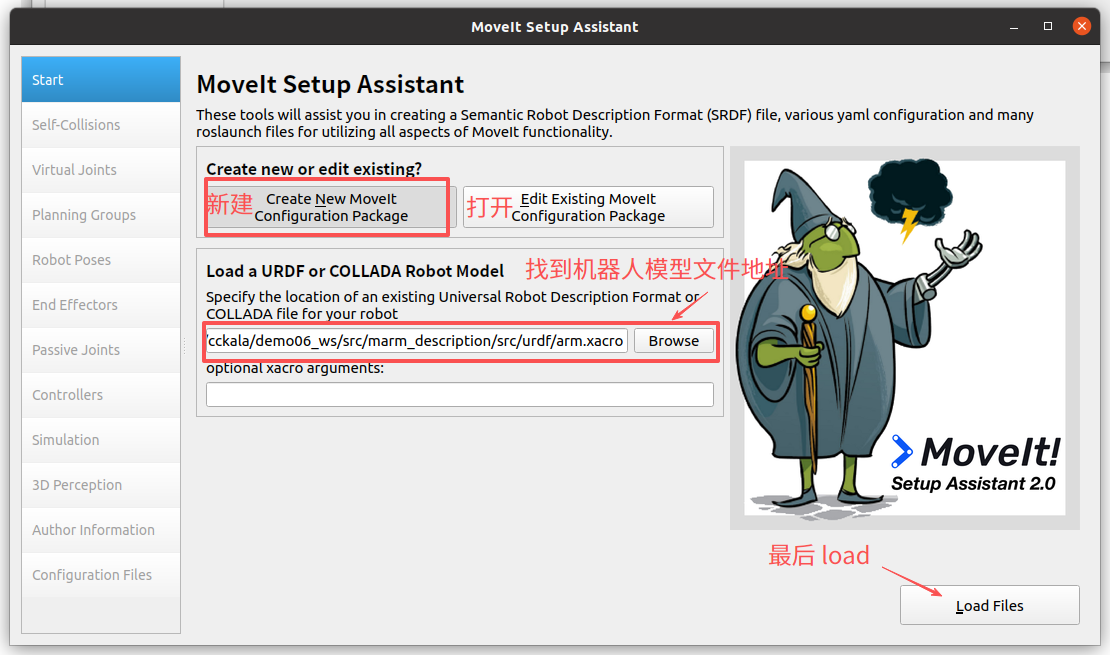
加载机器人模型
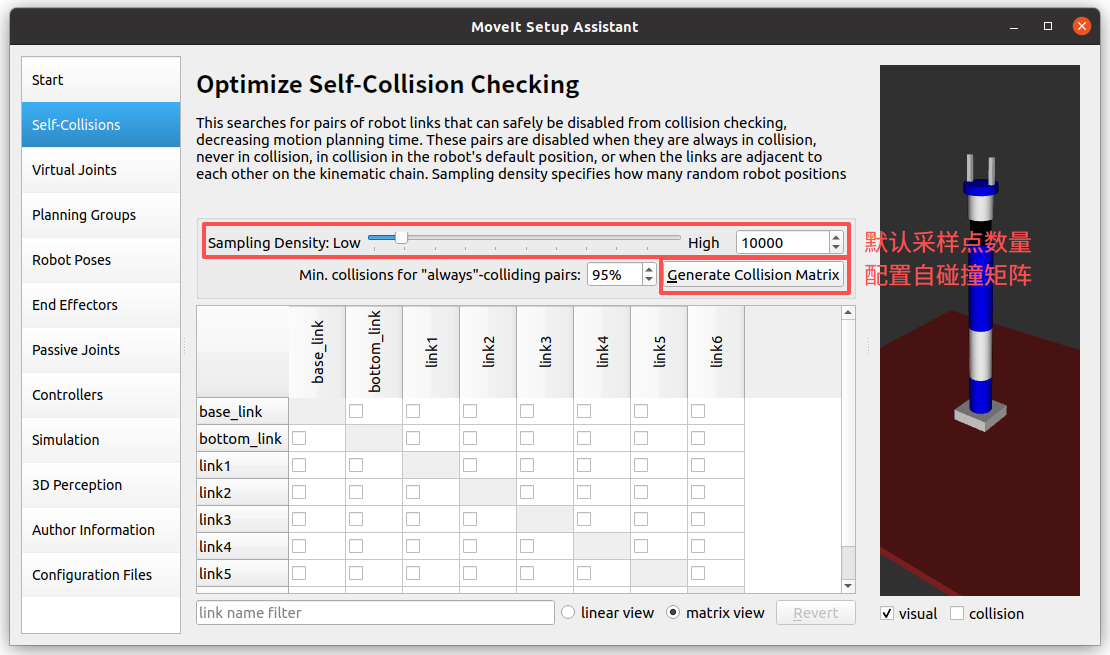
配置自碰撞矩阵
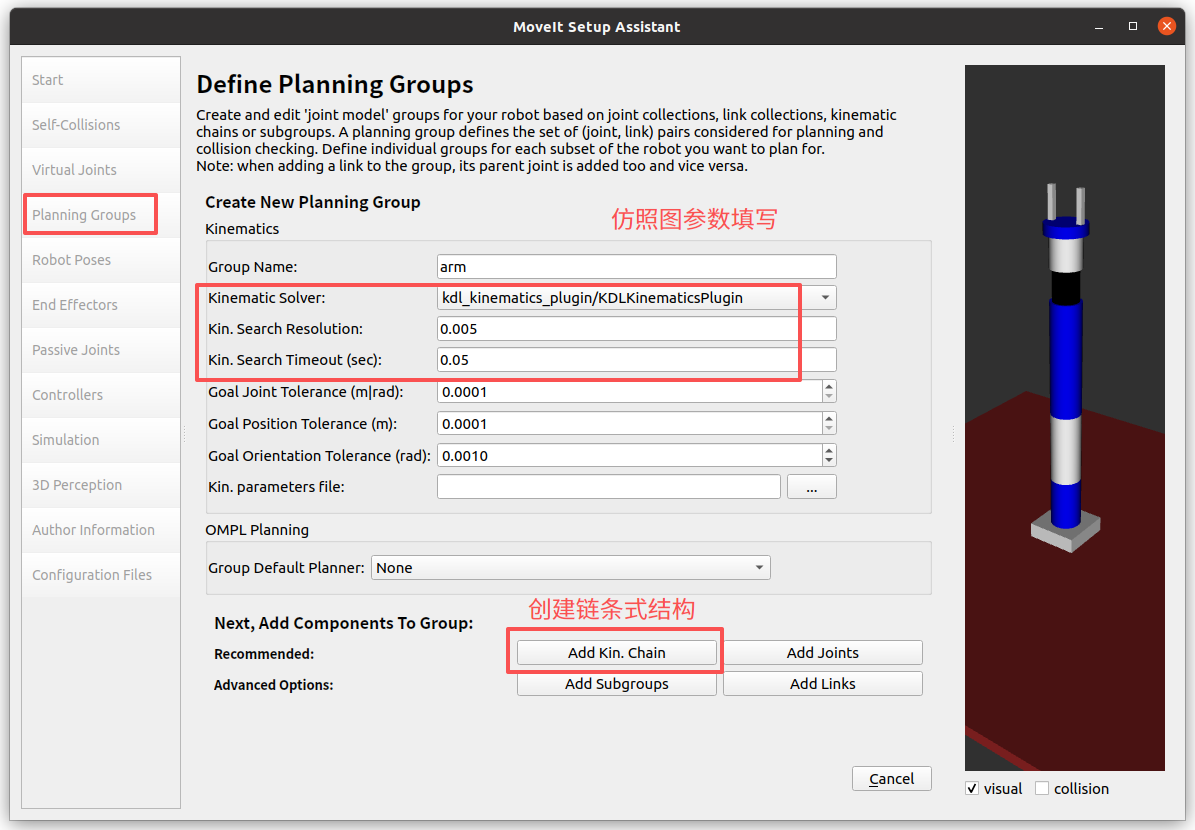
创建机械臂本体的 arm 组
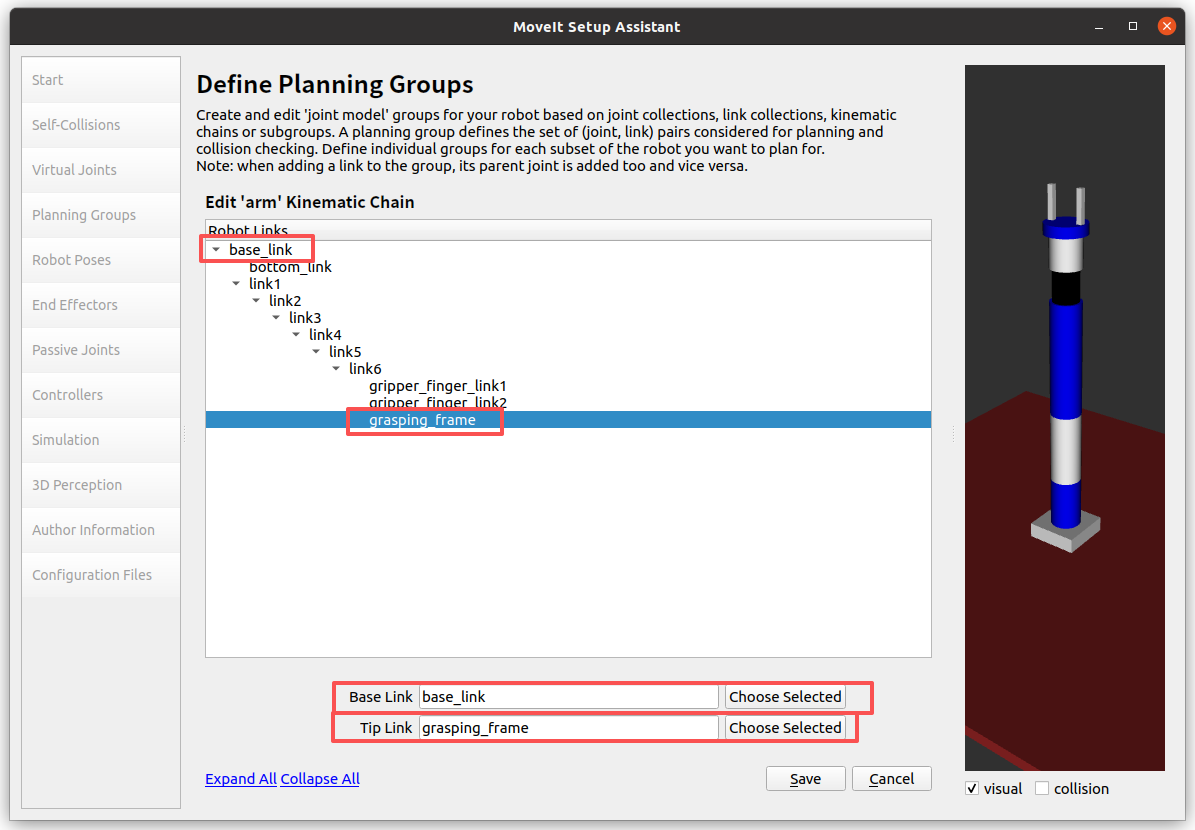
添加运动学工具链
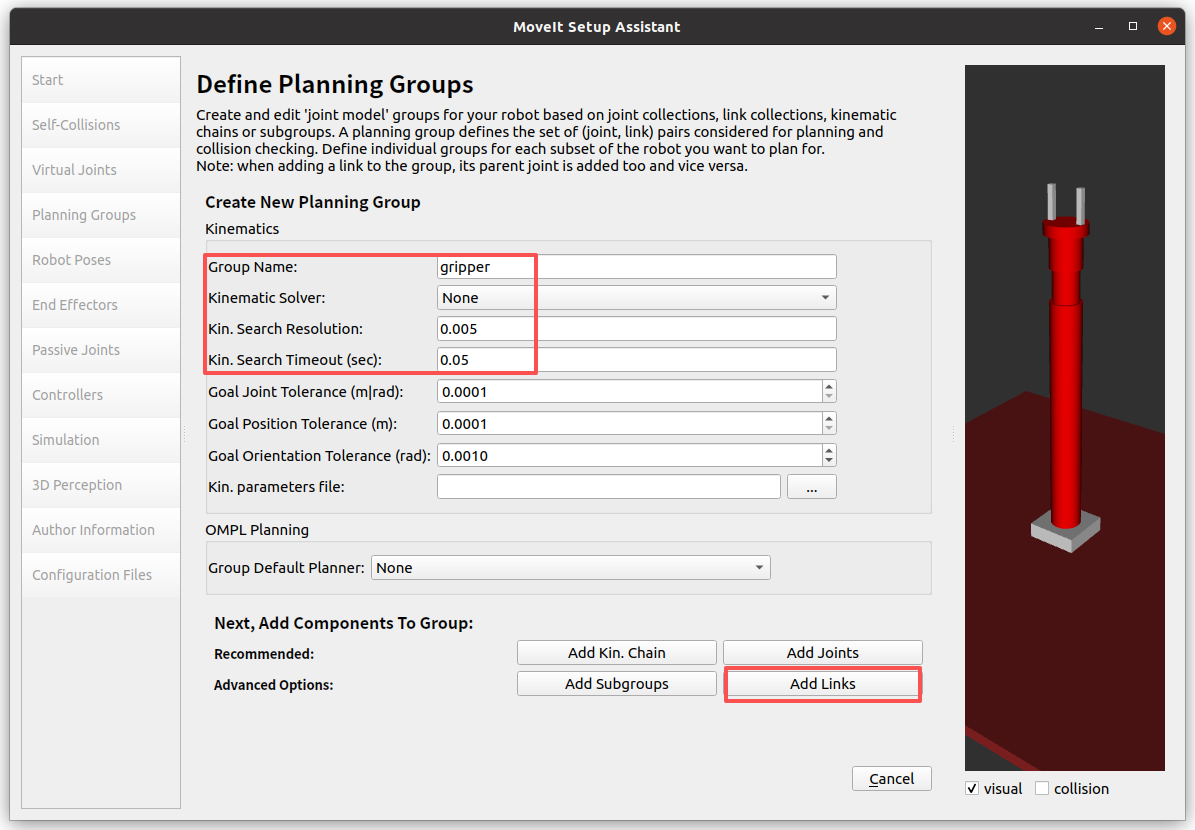
创建机械臂夹爪的 gripper 组
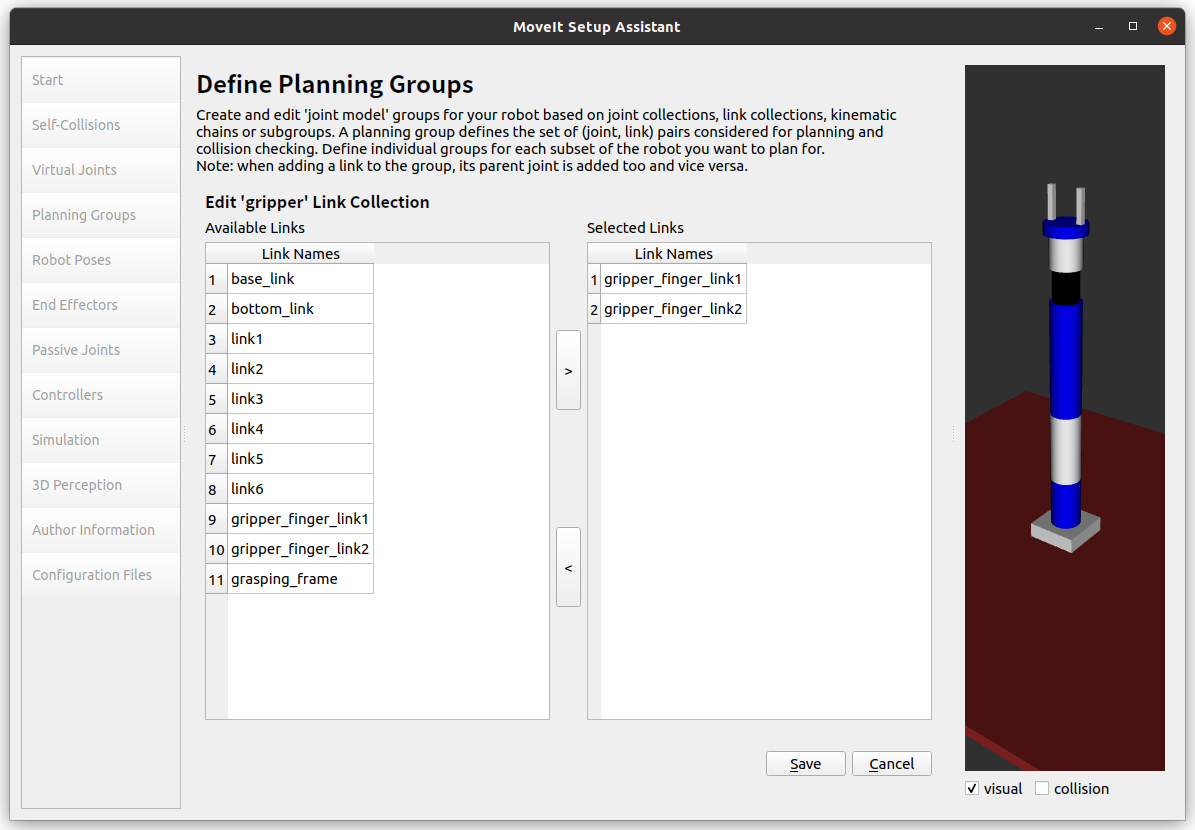
设置 gripper 组包含的 link
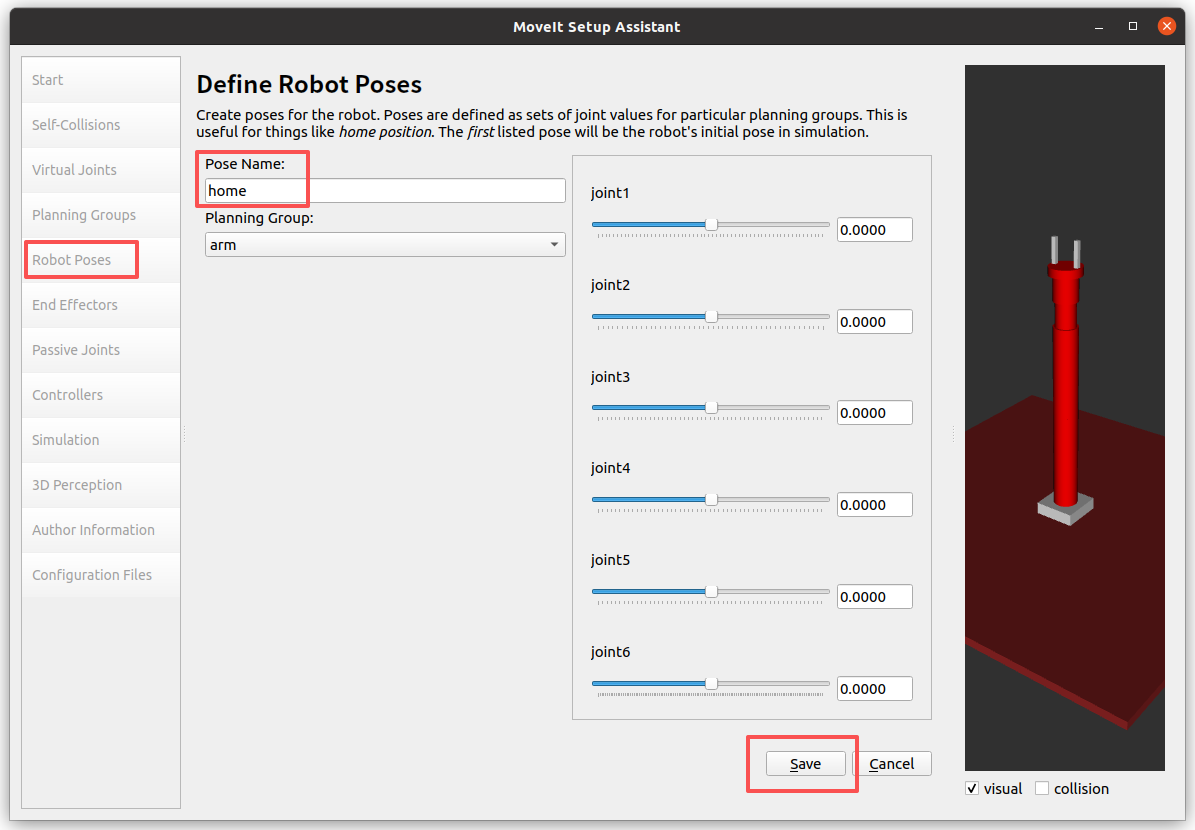
定义机器人位姿
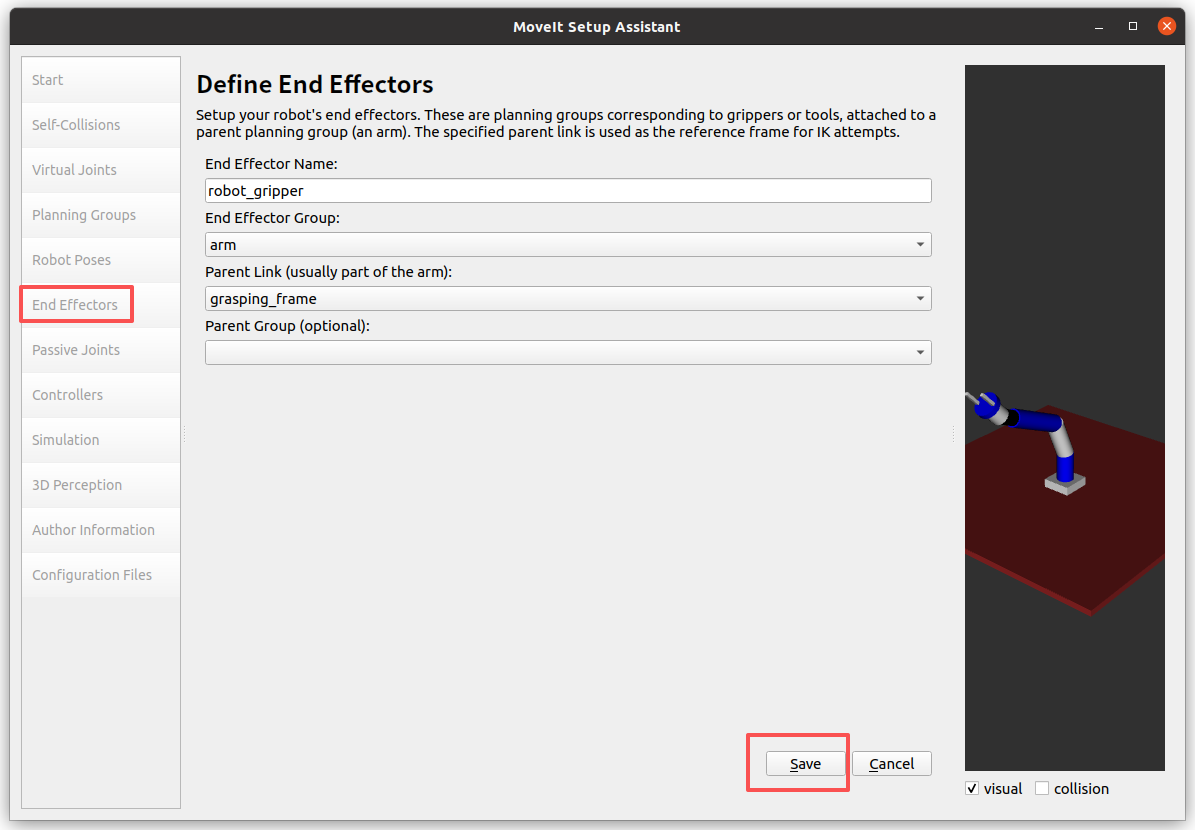
配置终端结构
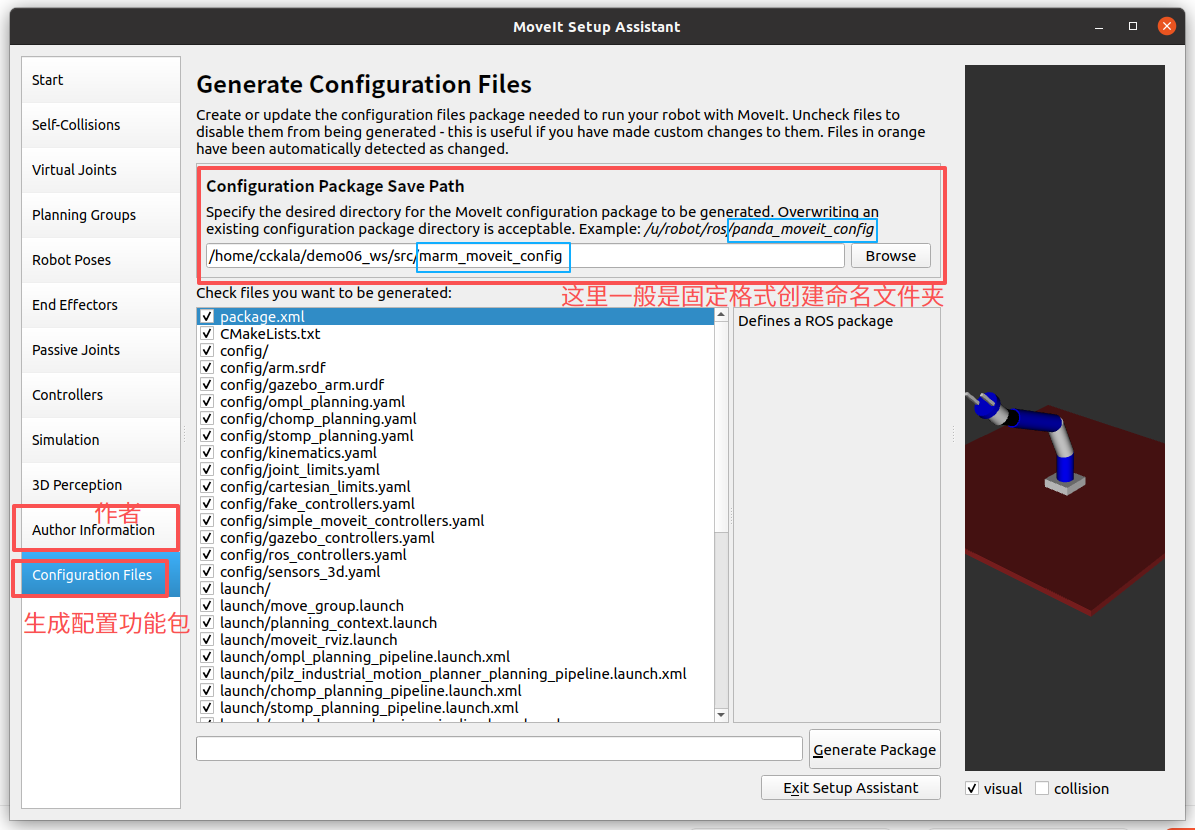
生成配置功能包
配置完成后点击 Exit Setup Assistant
启动 MoveIt!测试是否配置成功:
(前提)这个时候我们已经可以确认,MoveIt 已经配置完成且可以正常运行!
检查工作空间下,有一个 marm_moveit_config 的功能包,它包含大部分的 MoveIt! 启动所需要的配置文件和启动文件,输入运行:
roslaunch marm_moveit_config demo.launch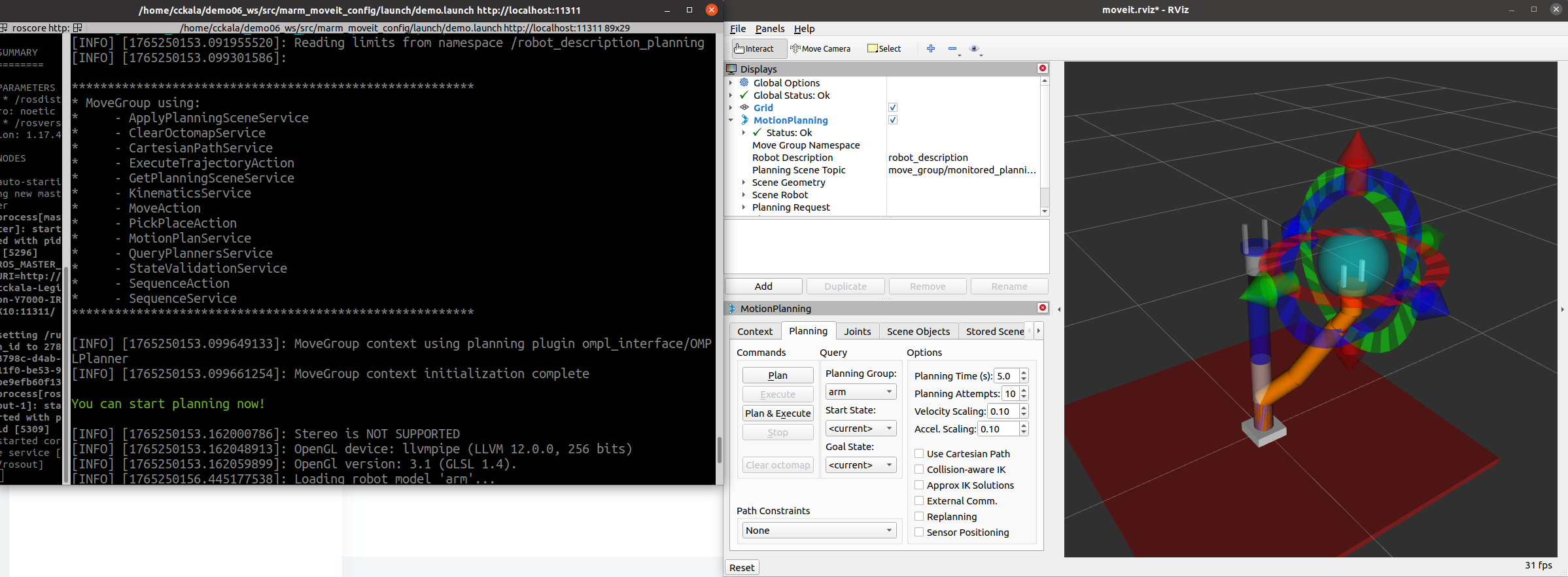
MoveIt! demo 启动界面
这部分启动界面和直接启动 marm_description / arm.launch 文件的不同在于,这个界面在 rviz 的基础上加入了 MoveIt! 插件,通过左下角插件窗口可以配置 MoveIt! 相关功能。
MoveIt 第一种控制机械臂方式 —— 拖动规划
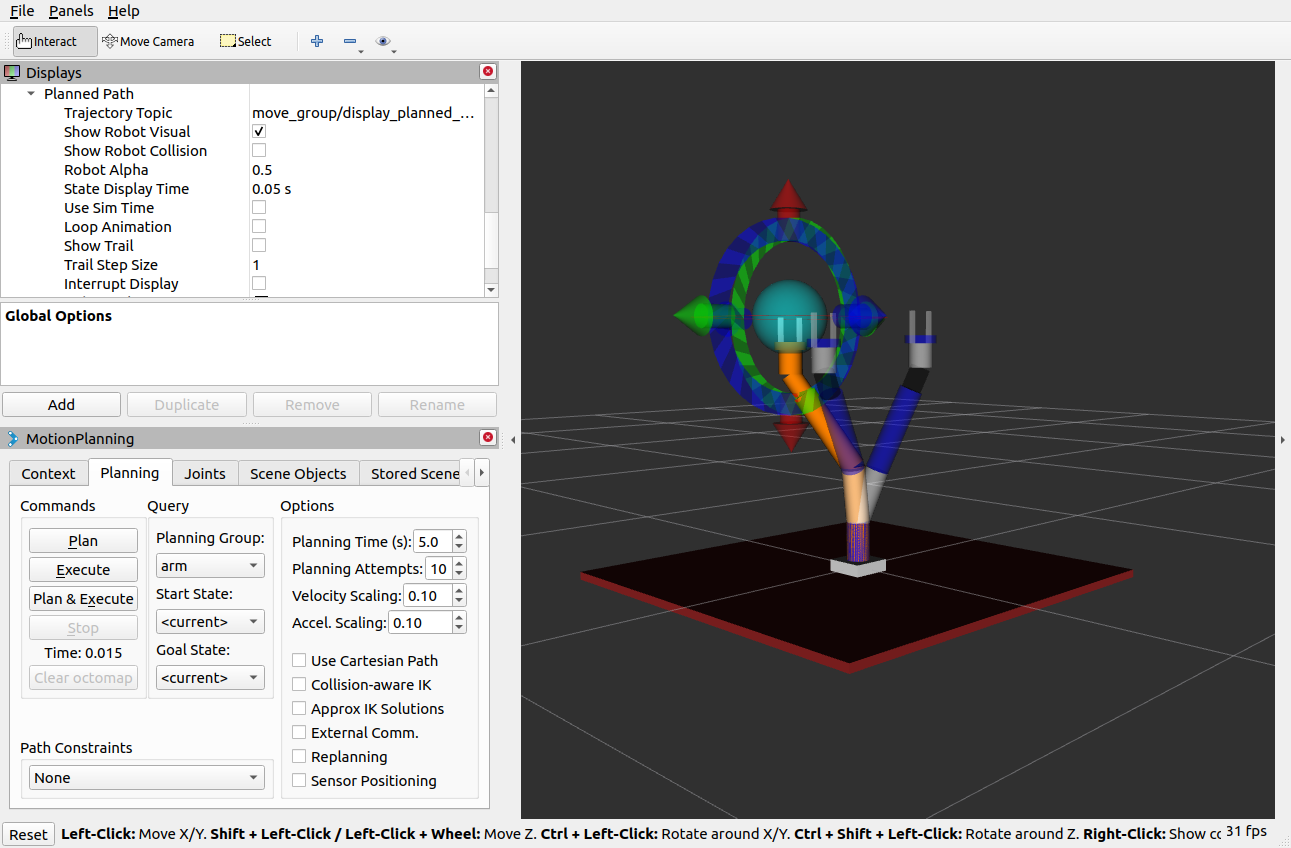
拖动控制
MoveIt 第二种控制机械臂方式 —— 随机目标规划
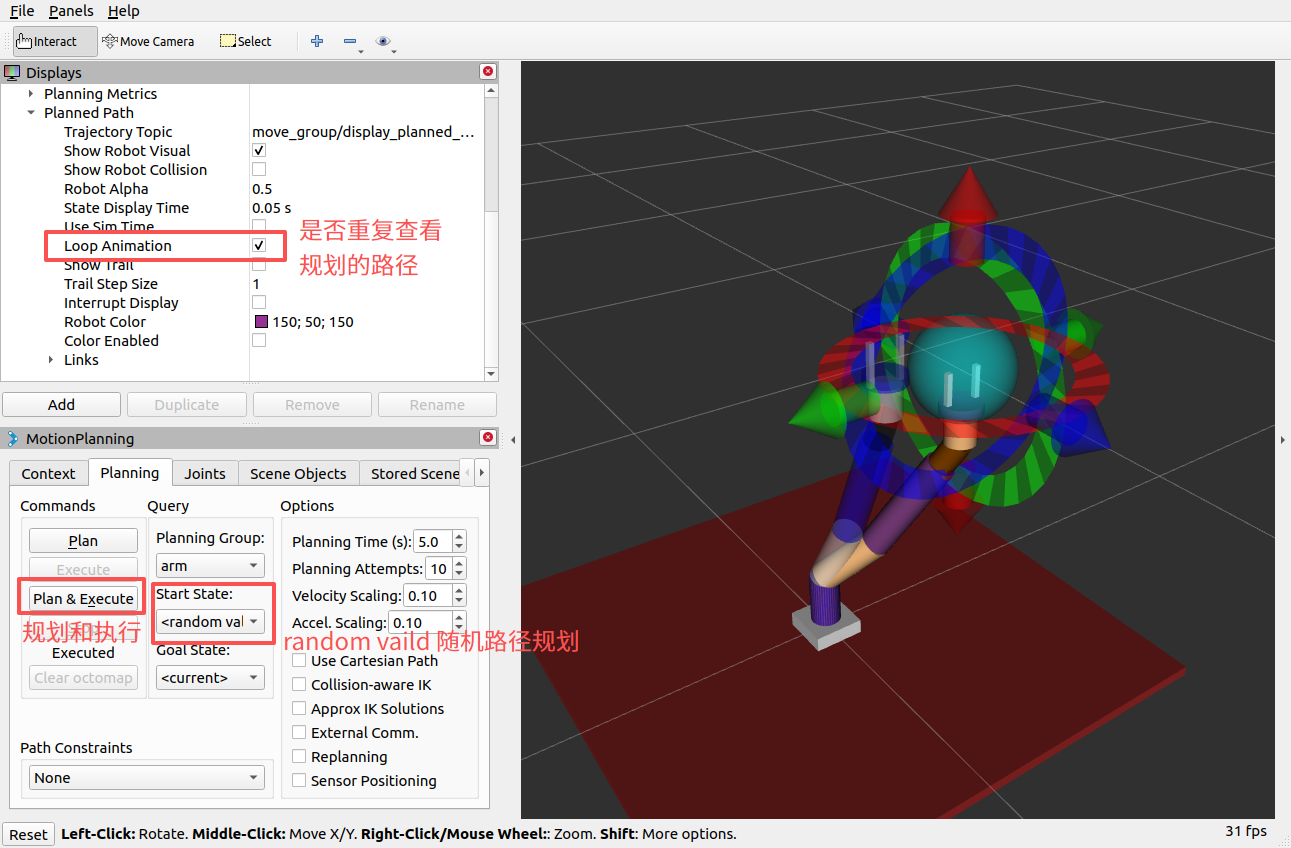
随机路径规划
初始位姿更新:
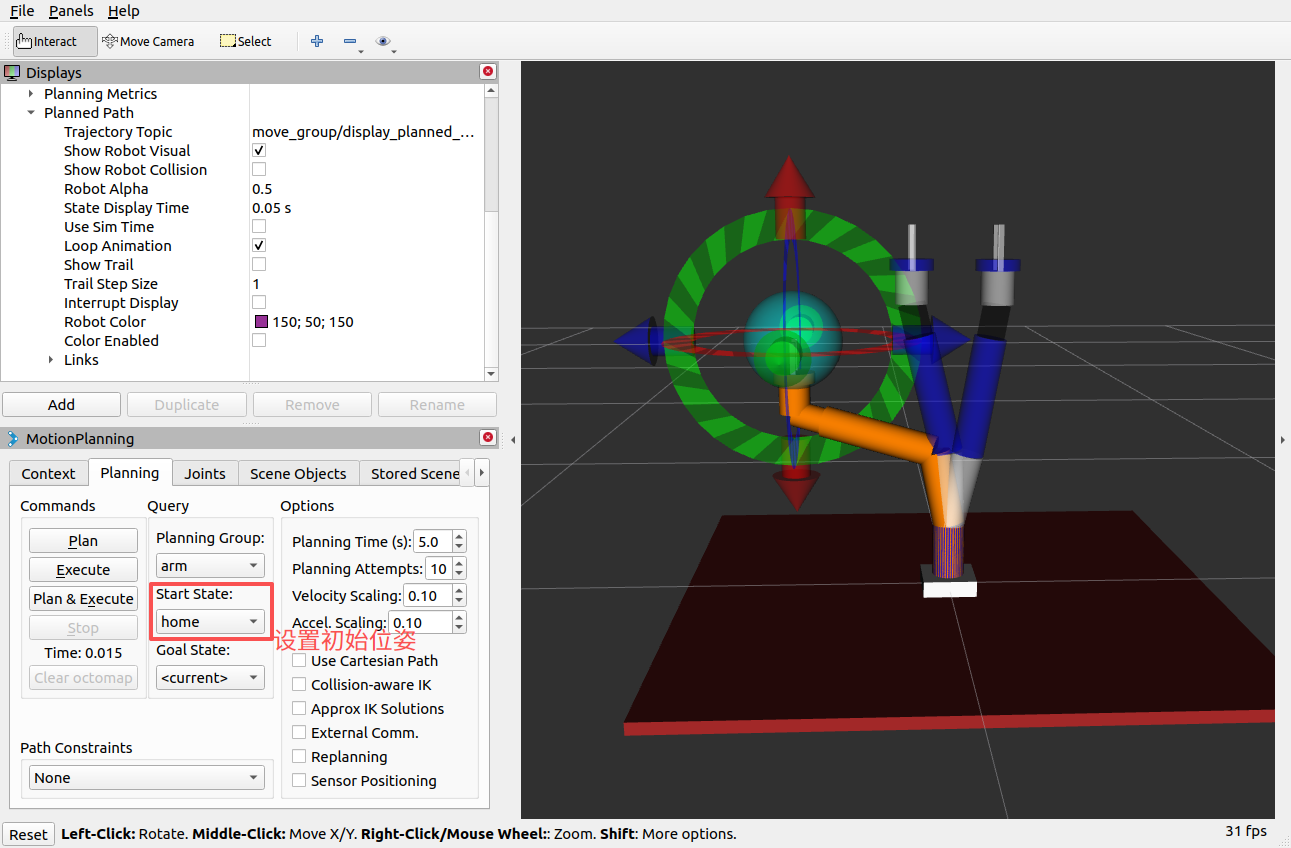
更新初始位姿后的规划效果
碰撞检测
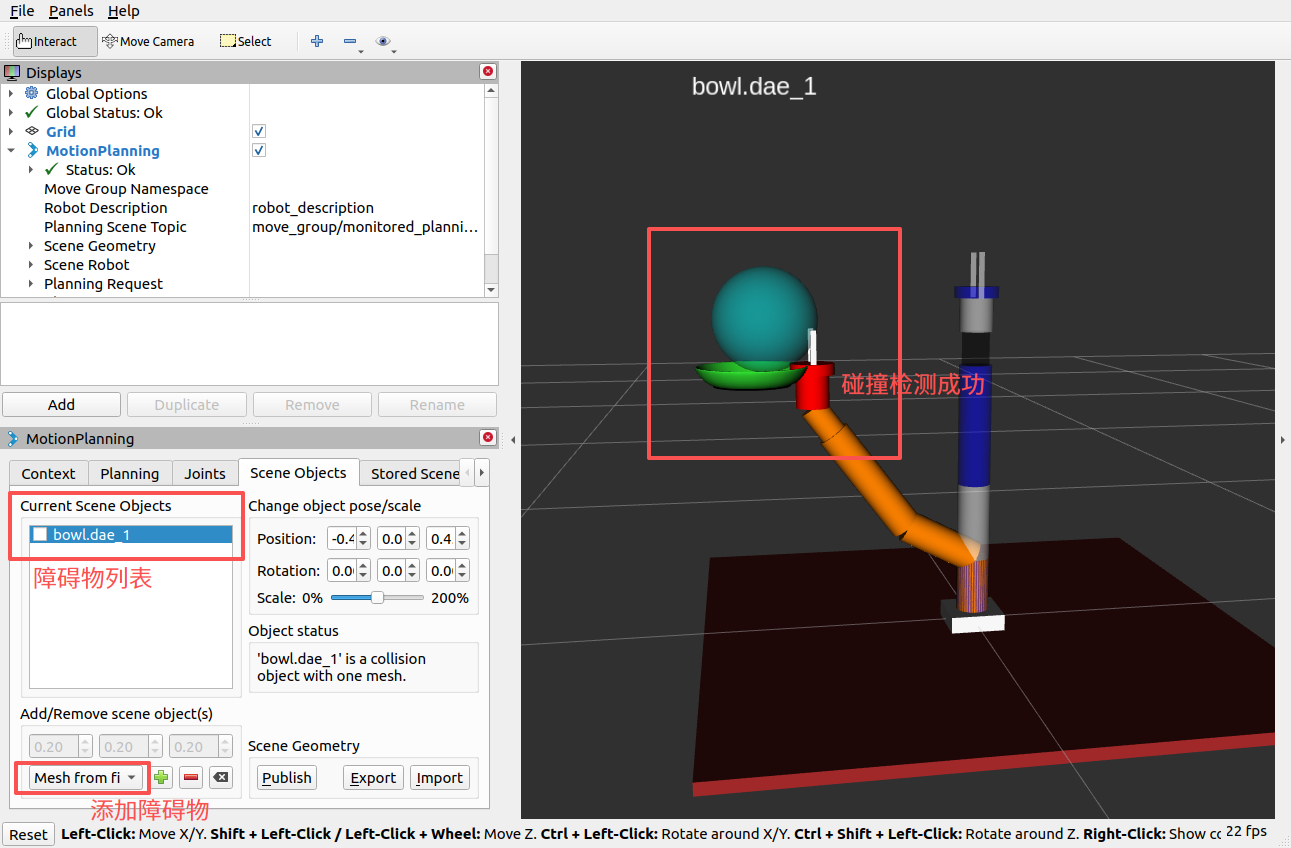
碰撞检测

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 1
1 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)