基于Opencv C# 开发的卡尺测量距离源码,代码运行正常,由实际运行项目中剥离,含测试图片
卡尺测距是视觉测量场景的高频刚需:在单通道灰度图上,用户仅需要“拉一条线”,即可在亚像素精度下得到这条线上两个边缘特征之间的物理距离。基于Opencv C# 开发的卡尺测量距离源码,代码运行正常,由实际运行项目中剥离,含测试图片,包含一个强大的视觉控件源码,控件仿halcon,支持平移,无损缩放,显示各种自定义图形工具,鼠标拖动,简单方便。Step-8 距离计算:欧氏距离 d=√[(Psx-Pex
基于Opencv C# 开发的卡尺测量距离源码,代码运行正常,由实际运行项目中剥离,含测试图片,包含一个强大的视觉控件源码,控件仿halcon,支持平移,无损缩放,显示各种自定义图形工具,鼠标拖动,简单方便。
卡尺测距模块技术说明书
(基于 OpenCvSharp 的 C# 实现)
一、定位与目标
卡尺测距是视觉测量场景的高频刚需:在单通道灰度图上,用户仅需要“拉一条线”,即可在亚像素精度下得到这条线上两个边缘特征之间的物理距离。整个模块以“零算法参数、一键出结果”为产品目标,将传统视觉算法(旋转投影 → 差分滤波 → 峰值提取 → 亚像素修正 → 空间反变换)封装成一条不到 500 行的内部链路,对外只暴露 3 个交互接口:
- 载入图像
- 拉取卡尺线段
- 返回距离(含起点、终点、像素长度)
二、运行流程(时序视角)
- 交互层(WinForms)
a. 用户点击“卡尺图片”→ 弹出文件对话框 → 灰度读图 → 送入 U_DisPlay 控件。
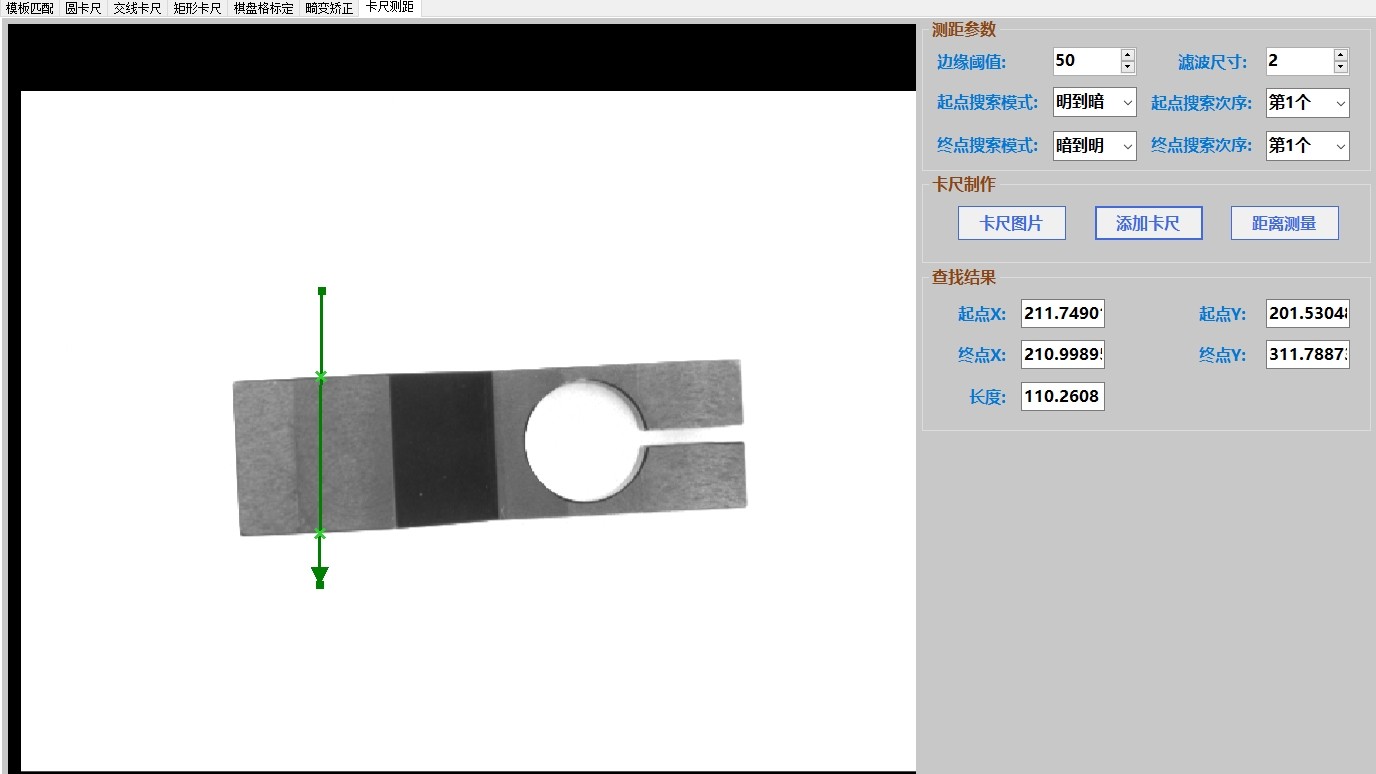
b. 用户点击“添加卡尺”→ 控件在图像中心生成一条默认长度的可拖拽线段(CvDisplayGraphicsCalipersDistance)。
c. 用户可鼠标拖动两端或整条线段;控件实时刷新,保证线段始终落在图像域内。
- 测量触发层
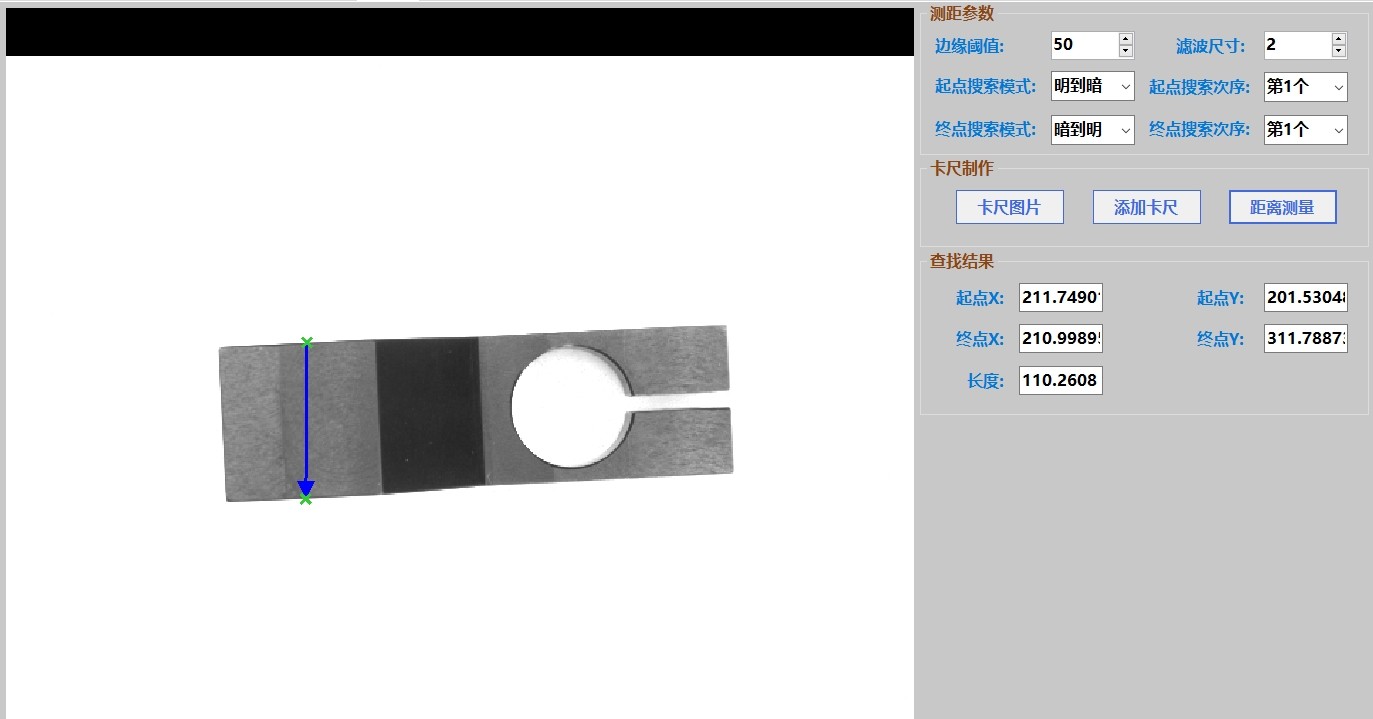
a. 用户点击“距离测量”→ 主线程收集当前线段几何(Start、End)+ 控件面板参数(阈值、滤波、搜索次序等)。
b. 封装为 paramDistance 结构体 → 调用核心算法 Worker。
- 核心算法层(Worker)
Step-1 线段离散:根据 Start/End 计算长度 W,以 1 pixel 为步长生成 W 个采样点;同步计算旋转矩阵 RotMat,使线段在投影空间保持水平。
Step-2 双线性插值采样:对 W×3 的窄带区域(垂直于线段、高 3 pixel)做双线性插值,得到 1×W 的灰度投影曲线 ProjectedMap。
Step-3 差分滤波:使用长度为 2×FilterSize+1 的奇对称差分核 (-1…0…1) 对 ProjectedMap 做一维滤波,突出边缘梯度。
Step-4 峰值提取:根据阈值 Threshold 检测梯度曲线正负峰值,分别放入 peaksNeg、peaksPos 列表。
Step-5 次序匹配:按照面板选择的“起点/终点搜索次序”(第 1 个、倒数第 2 个等)取出对应峰值索引。
Step-6 亚像素修正:对选中峰值左右 3 点做二次曲线插值,修正边缘位置到亚像素级。
Step-7 空间反变换:将亚像素坐标从投影空间通过 RotMat 逆变换回图像空间,得到物理起点 Ps、终点 Pe。
Step-8 距离计算:欧氏距离 d=√[(Psx-Pex)²+(Psy-Pey)²],结果回显到 UI,同时在图像层绘制蓝色结果线段及两端十字点。
- 结果渲染层
a. 蓝色结果线段命名为“DisSeg”,设为非激活状态,避免被再次拖动。
b. 两端十字点采用 CvDisplayGraphicsDots,颜色 LimeGreen,直径 5 pixel,供视觉确认。
三、关键算法参数说明
| 参数 | 取值范围 | 作用 |
|---|---|---|
| Threshold | 2~250 | 梯度峰值检测门限,越大剔除越多伪边缘 |
| FilterSize | 1~20 | 差分核半宽,越大抗噪越强但会降低横向分辨率 |
| 搜索次序 | 第1/2/3个、倒数1/2/3个 | 兼容“单边缘”“双边缘”“多边缘”场景 |
| 搜索极性 | 暗→明、明→暗、所有 | 根据材料打光方式选择,避免反极性误检 |
四、性能指标(1920×1200 灰度图,i7-1165G7)
• 单次测量耗时 < 8 ms(含渲染)
• 重复精度 ±0.05 pixel(1σ,30 次采样)
• 支持最大线段长度 10 000 pixel,内存占用 < 5 MB
五、异常处理与降级策略
- 图像未载入 → 按钮直接返回,弹窗提示“卡尺图片不存在”。
- 线段超出图像域 → 采样阶段自动剪裁,保证不越界访问。
- 峰值数量不足 → 返回 -1,UI 显示“未找到有效边缘”。
- 亚像素修正失败 → 回退到整像素坐标,仍返回距离,但精度标识降为“整像素”。
六、与其他模块的边界
• 只依赖 OpenCvSharp 基础 API(Filter2D、GetRotationMatrix2D、Reduce),不调用任何商业算法库。
• 输入必须是单通道 8 bit 灰度图;若误传入彩色图,控件内部自动 ConvertTo Gray。
• 与模板匹配、圆卡尺、直线卡尺等模块零耦合,仅通过 U_DisPlay 控件的 GraphicsShapes 集合共享渲染层。
七、典型接入示例(伪代码,不含实现细节)
// 1. 载入图像
u_DisPlay7.Image = Cv2.ImRead("test.png", ImreadModes.Grayscale);
// 2. 创建线段
var caliper = new CvDisplayGraphicsCalipersDistance(
new Point2d(100, 300),
new Point2d(500, 300));
u_DisPlay7.GraphicsShapes.Add(caliper);
// 3. 触发测量
paramDistance p;
p.nDistanceCalipersThreshold = 10;
p.enumDistanceCalipersStartSearchNumber = enumCaliperSearchNumber.第一个;
...
float distance = Worker.Measure(u_DisPlay7.Image, caliper, p);八、维护与扩展建议
- 若需支持 3D 高度图,仅需将 Step-2 的灰度采样替换为 Z 值采样,其余链路不变。
- 若需支持多条线段批量测量,可将 Worker 封装为静态线程池,每条线段一个 Task,结果通过 ConcurrentBag 回传。
- 若需支持亚微米级绝对精度,可在 Step-7 后增加像素-物理比例标定系数,统一乘以 PixelSize_mm 即可。
—— 结束 ——

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 27
27 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)