deepseek vs 元宝 对Ealpha和Zalpha的解释
同时使用Ealpha和Zalpha的原因Zalpha:提供快速性和鲁棒性,保证观测器收敛Ealpha:提供平滑性和可用性,用于位置估计协同工作Zalpha负责"粗调",Ealpha负责"精调"频域分离:高频成分用于控制,低频成分用于观测这种结构使得SMO既具有滑模控制的强鲁棒性,又能得到平滑的位置估计信号,是经过数学证明的最佳结构。元宝。
提问:
microchip的an1078配套的源代码中_Q15mpy(smo1.Gsmopos,(smo1.vAlpha - smo1.eAlpha - smo1.zAlpha));同时使用Ealpha和Zalpha,这是为何?
/*************************************************************/
deepseek的回答
1. SMO的数学原理
永磁同步电机在α-β坐标系下的状态方程:
dIα/dt = (Vα - R·Iα - Eα)/L dIβ/dt = (Vβ - R·Iβ - Eβ)/L
其中:
-
Eα, Eβ是反电动势(包含位置信息) -
但我们无法直接测量反电动势
2. SMO的构造思路
构建状态观测器:
// 估计的状态方程: dEstIα/dt = (Vα - R·EstIα - Êα - Zα)/L dEstIβ/dt = (Vβ - R·EstIβ - Êβ - Zβ)/L
这里有两个关键项:
Ealpha(反电势估计值)
-
作用:反电动势的低频分量
-
特性:平滑、连续
-
来源:对滑模信号
Zalpha进行低通滤波得到 -
用途:用于位置和速度估计
Zalpha(滑模控制量)
-
作用:强迫观测器跟踪实际系统的高频切换信号
-
特性:不连续、Bang-Bang控制
-
来源:电流误差的符号函数(或饱和函数)
-
用途:提供系统的鲁棒性和收敛性
3. 为什么需要两者同时存在?
分工协作机制:
// 在观测器更新中: EstIalpha = Fsmopos*EstIalpha + Gsmopos*(Valpha_f - Ealpha - Zalpha); // ↑ // 两者协同工作
Zalpha 的作用:
-
快速响应:立即修正电流估计误差
-
抗扰动:对参数变化和扰动不敏感
-
强迫收敛:保证估计电流跟踪实际电流
Ealpha 的作用:
-
平滑估计:提供可用的反电势信号
-
位置提取:用于PLL角度估计
-
噪声抑制:滤除高频切换噪声
4. 物理意义类比
可以把SMO想象成一个双环控制系统:
外环(慢环):Ealpha → 位置/速度估计 → 相对精确但响应慢 内环(快环):Zalpha → 电流跟踪 → 快速但粗糙
5. Microchip代码的具体实现
在AN1078中:
// 观测器更新:
EstIalpha = _Q15mpy(smo1.Fsmopos, EstIalpha) +
_Q15mpy(smo1.Gsmopos, (smo1.vAlpha - smo1.eAlpha - smo1.zAlpha));
// 分解来看:
// smo1.vAlpha :施加的电压(已知)
// smo1.eAlpha :反电势估计(低频,平滑)
// smo1.zAlpha :滑模控制量(高频,切换)
为什么减去两者?
(Valpha - Ealpha - Zalpha) 相当于: 1. Valpha - Ealpha :基于模型的前馈补偿 2. - Zalpha :基于误差的反馈校正
6. 如果去掉其中一个会怎样?
情况1:去掉 Zalpha
EstIalpha = Fsmopos*EstIalpha + Gsmopos*(Valpha_f - Ealpha);
结果:
-
失去滑模控制的鲁棒性
-
对参数变化敏感
-
收敛速度慢
-
可能无法准确跟踪
情况2:去掉 Ealpha
EstIalpha = Fsmopos*EstIalpha + Gsmopos*(Valpha_f - Zalpha);
结果:
-
反电势估计不连续
-
位置估计噪声大
-
PLL难以稳定工作
-
高速性能差
7. 完整的工作流程
void SMO_Update(void) {
// 1. 用当前状态预测下一时刻电流
EstIalpha = Fsmopos*EstIalpha + Gsmopos*(Valpha_f - Ealpha - Zalpha);
// 2. 计算预测误差
error = EstIalpha - Ialpha_meas;
// 3. 生成滑模控制信号(高频)
Zalpha = sign(error) * Kslide;
// 4. 从滑模信号提取反电势(低频)
Ealpha = LPF(Zalpha);
// 5. 用Ealpha进行位置估计
theta = atan2(-Ealpha, Ebeta);
}
8. 在您的代码中的体现
您的代码是正确的:
EstIalpha = Fsmopos*EstIalpha + Gsmopos*(Valpha_f - Ealpha - Zalpha); // 同时使用两者 ✓
总结
同时使用 Ealpha 和 Zalpha 的原因:
-
Zalpha:提供快速性和鲁棒性,保证观测器收敛 -
Ealpha:提供平滑性和可用性,用于位置估计 -
协同工作:
Zalpha负责"粗调",Ealpha负责"精调" -
频域分离:高频成分用于控制,低频成分用于观测
这种结构使得SMO既具有滑模控制的强鲁棒性,又能得到平滑的位置估计信号,是经过数学证明的最佳结构。
/*************************************************************/
元宝
Microchip AN1078 SMO设计深度解析:Ealpha与Zalpha同时使用的奥秘
您提出了一个非常深刻的问题!这确实是AN1078设计的一个精妙之处,也是很多工程师容易困惑的地方。让我详细解析这种设计的数学原理和物理意义。
1. AN1078 SMO设计的数学原理
1.1 连续时间与离散时间的差异
// AN1078 SMO的数学基础解析
void analyze_an1078_mathematical_basis(void) {
printf("=== AN1078 SMO设计的数学原理 ===\n");
printf("🔬 关键洞察: 连续时间 vs 离散时间实现差异\n");
printf("\n📐 连续时间SMO理论方程:\n");
printf("L·di_est/dt = V - R·i_est - Z (Z是滑模控制量)\n");
printf("其中 Z = K·sign(i_est - i_meas)\n");
printf("\n🔄 离散化时的精妙处理:\n");
printf("AN1078将方程离散为:\n");
printf("i_est[k+1] = F·i_est[k] + G·(V[k] - E[k] - Z[k])\n");
printf("这里 E[k] 不是反电势,而是上周期的滑模输出!\n");
printf("\n💡 核心思想: 预测-校正结构\n");
printf("E[k] = 预测项(基于上周期信息)\n");
printf("Z[k] = 校正项(基于当前误差)\n");
printf("形成完美的预测-校正观测器结构!\n");
}
2. AN1078 具体实现分析
2.1 源代码关键部分解析
// AN1078源代码关键算法解析
void decode_an1078_source_algorithm(void) {
printf("=== AN1078源代码算法解析 ===\n");
printf("🔍 AN1078关键代码段分析:\n");
printf("_Q15mpy(smo1.Gsmopos, (smo1.vAlpha - smo1.eAlpha - smo1.zAlpha));\n");
printf("\n📊 变量含义分析:\n");
printf("vAlpha: 当前α轴电压\n");
printf("eAlpha: 上周期估计的反电势(滤波后的zAlpha)\n");
printf("zAlpha: 当前滑模控制量\n");
printf("\n🔄 时间索引说明:\n");
printf("在离散时间中,实际执行的是:\n");
printf("i_est[k+1] = F·i_est[k] + G·(v[k] - e[k] - z[k])\n");
printf("注意: e[k] = LPF(z[k-1]) 是上一周期的信息!\n");
printf("\n🎯 AN1078的设计精髓:\n");
printf("eAlpha承担'预测'角色,zAlpha承担'校正'角色\n");
printf("这与传统SMO有本质区别!\n");
}
2.2 AN1078的完整算法流程
// AN1078完整算法流程重现
void an1078_complete_algorithm_flow(void) {
printf("=== AN1078完整算法流程 ===\n");
printf("🔄 每个控制周期的执行顺序:\n");
printf("1. 📊 使用上周期数据:\n");
printf(" eAlpha = LPF(zAlpha_prev); // 上周期z的滤波\n");
printf(" \n");
printf("2. 🧮 观测器预测步:\n");
printf(" i_est_temp = F·i_est_prev + G·(v - eAlpha)\n");
printf(" \n");
printf("3. ⚖️ 滑模校正:\n");
printf(" error = i_est_temp - i_meas\n");
printf(" zAlpha = K·sat(error)\n");
printf(" \n");
printf("4. 🔄 观测器校正步:\n");
printf(" i_est_new = i_est_temp - G·zAlpha\n");
printf(" \n");
printf("5. 🌊 反电势提取:\n");
printf(" eAlpha_new = LPF(zAlpha) // 为下周期准备\n");
printf("\n💡 关键发现: 实际上是两步算法!\n");
}
3. 与传统SMO的对比分析
3.1 传统SMO vs AN1078 SMO
// 两种SMO结构对比
void compare_smo_architectures(void) {
printf("=== 传统SMO vs AN1078 SMO结构对比 ===\n");
printf("🎯 传统SMO结构(您之前的方向):\n");
printf("i_est[k+1] = F·i_est[k] + G·(v[k] - z[k])\n");
printf("特点: 单步算法,简洁直接\n");
printf("eAlpha仅用于PLL,不反馈回观测器\n");
printf("\n🎯 AN1078 SMO结构(预测-校正):\n");
printf("i_est[k+1] = F·i_est[k] + G·(v[k] - e[k] - z[k])\n");
printf("特点: 两步算法,e[k]来自上周期z的滤波\n");
printf("eAlpha既用于PLL,也反馈回观测器\n");
printf("\n📊 性能对比:\n");
printf传统SMO: 响应快,但可能噪声大\n");
printf("AN1078 SMO: 更平滑,抗噪性好,但稍复杂\n");
}
3.2 数学等价性证明
// 两种方法的数学等价性分析
void mathematical_equivalence_proof(void) {
printf("=== 两种SMO方法的数学等价性分析 ===\n");
printf("🔍 仔细分析AN1078的离散化过程:\n");
printf("\n假设采用前向欧拉离散化:\n");
printf("连续方程: L·di/dt = V - R·i - Z\n");
printf("离散化: L·(i[k+1]-i[k])/T = V[k] - R·i[k] - Z[k]\n");
printf("整理得: i[k+1] = (1-RT/L)·i[k] + (T/L)·(V[k] - Z[k])\n");
printf("\n❓ 那么AN1078的 eAlpha 是什么?\n");
printf("实际上,在AN1078中: eAlpha ≈ Z[k-1] 的滤波值\n");
printf("因此: V[k] - eAlpha - Z[k] ≈ V[k] - Z[k-1] - Z[k]\n");
printf("\n💡 物理意义: 这是一种平滑技术!\n");
printf用上周期的Z平滑本周期的控制,减少抖振\n");
}
4. 在您系统中实现的正确方式
4.1 方案A:按照AN1078方式实现
// 按照AN1078方式的正确实现
void implement_an1078_style_smo(void) {
printf("=== 方案A: 按照AN1078方式实现 ===\n");
printf("🔧 关键修改: 正确理解时间索引关系\n");
printf("\n📝 在您代码中的具体实现:\n");
printf("// 需要添加eAlpha的存储变量\n");
printf("static float eAlpha_prev = 0.0f; // 上周期反电势\n");
printf("static float eBeta_prev = 0.0f;\n");
printf("static float zAlpha_prev = 0.0f; // 上周期滑模量\n");
printf("static float zBeta_prev = 0.0f;\n");
printf("\n// 每个周期执行:\n");
printf("void AN1078_Style_SMO(void) {\n");
printf(" // 1. 使用上周期滤波后的z作为预测项\n");
printf(" EstIalpha = Fsmopos*EstIalpha + Gsmopos*(Valpha_f - eAlpha_prev - zAlpha_prev);\n");
printf(" \n");
printf(" // 2. 计算当前误差和滑模量\n");
printf(" IalphaError = EstIalpha - tClark_Ialpha;\n");
printf(" Zalpha = saturate(IalphaError) * Kslide;\n");
printf(" \n");
printf(" // 3. 为下周期准备eAlpha(滤波当前z)\n");
printf(" eAlpha_prev = eAlpha_prev + (Zalpha - eAlpha_prev) * filter_K;\n");
printf(" zAlpha_prev = Zalpha; // 保存当前z\n");
printf(" \n");
printf(" // 4. 反电势输出(用于PLL)\n");
printf(" Ealpha = eAlpha_prev; // 使用滤波后的值\n");
printf("}\n");
}
4.2 方案B:简化实现(推荐)
// 简化实现方案
void simplified_implementation(void) {
printf("=== 方案B: 简化实现(推荐) ===\n");
printf("🎯 目标: 保持AN1078精髓,但更简单可靠\n");
printf("\n🔧 实现方案: 将eAlpha和Zalpha合并\n");
printf("// 简化版SMO观测器\n");
printf("void Simplified_SMO(void) {\n");
printf(" // 方法1: 使用滤波后的滑模量\n");
printf(" EstIalpha = Fsmopos*EstIalpha + Gsmopos*(Valpha_f - Ealpha);\n");
printf(" // 其中 Ealpha 是滤波后的滑模量\n");
printf(" \n");
printf(" // 方法2: 或者使用当前滑模量\n");
printf(" EstIalpha = Fsmopos*EstIalpha + Gsmopos*(Valpha_f - Zalpha);\n");
printf(" \n");
printf(" // 推荐方法2,更简单直接\n");
printf("}\n");
printf("\n💡 工程建议: 从简单开始\n");
printf("先实现标准SMO,稳定后再尝试AN1078的增强特性\n");
}
5. 您当前代码的问题诊断
5.1 具体问题分析
// 分析您当前代码的具体问题
void analyze_your_current_issue(void) {
printf("=== 您当前代码的具体问题分析 ===\n");
printf("🔴 您代码中的问题:\n");
printf("EstIalpha = Fsmopos*EstIalpha + Gsmopos*(Valpha_f - Ealpha - Zalpha);\n");
printf("\n❌ 问题1: 时间索引混乱\n");
printf("Ealpha 应该是上周期的滤波结果\n");
printf("但您同时使用当前周期的Ealpha和Zalpha\n");
printf("\n❌ 问题2: 缺少eAlpha的更新逻辑\n");
printf("AN1078中eAlpha来自上周期zAlpha的滤波\n");
printf("您代码中Ealpha的更新时机可能不正确\n");
printf("\n❌ 问题3: 可能形成代数环\n");
printf("如果Ealpha和Zalpha都依赖当前误差,可能形成代数环\n");
printf("\n💡 解决方案: 理清时间序列关系\n");
}
6. 正确的AN1078风格实现
6.1 完整正确的实现代码
// 正确的AN1078风格SMO实现
void Correct_AN1078_Style_Implementation(void) {
printf("=== 正确的AN1078风格SMO实现 ===\n");
// 需要添加的静态变量
static float eAlpha_prev = 0.0f; // 上周期反电势估计
static float eBeta_prev = 0.0f;
static float zAlpha_prev = 0.0f; // 上周期滑模量
static float zBeta_prev = 0.0f;
// 1. SMO观测器更新(使用上周期数据)
EstIalpha = Fsmopos * EstIalpha + Gsmopos * (Valpha_f - eAlpha_prev - zAlpha_prev);
EstIbeta = Fsmopos * EstIbeta + Gsmopos * (Vbeta_f - eBeta_prev - zBeta_prev);
// 2. 计算当前误差
IalphaError = EstIalpha - tClark_Ialpha;
IbetaError = EstIbeta - tClark_Ibeta;
// 3. 当前滑模控制量计算
float satIalpha = (IalphaError > 0.5f) ? 0.5f :
(IalphaError < -0.5f) ? -0.5f : IalphaError;
float satIbeta = (IbetaError > 0.5f) ? 0.5f :
(IbetaError < -0.5f) ? -0.5f : IbetaError;
Zalpha = satIalpha * Kslide;
Zbeta = satIbeta * Kslide;
// 4. 为下周期准备反电势估计(滤波当前滑模量)
#define filter_K 0.135695f // 500Hz截止频率
eAlpha_prev = eAlpha_prev + (Zalpha - eAlpha_prev) * filter_K;
eBeta_prev = eBeta_prev + (Zbeta - eBeta_prev) * filter_K;
// 保存当前滑模量为下周期使用
zAlpha_prev = Zalpha;
zBeta_prev = Zbeta;
// 5. 当前周期反电势输出(用于PLL)
Ealpha = eAlpha_prev; // 使用滤波后的值
Ebeta = eBeta_prev;
printf("AN1078 SMO: e_prev=(%.3f,%.3f), z_prev=(%.3f,%.3f)\n",
eAlpha_prev, eBeta_prev, zAlpha_prev, zBeta_prev);
}
7. 根本问题解决方案
7.1 针对转速飙升的具体修复
// 针对转速飙升的修复方案
void fix_runaway_specific_solution(void) {
printf("=== 针对转速飙升的具体修复方案 ===\n");
printf("🎯 基于AN1078原理的修复策略:\n");
printf("\n🔧 方案1: 完全按照AN1078实现\n");
printf("优点: 理论严谨,抗噪性好\n");
printf("缺点: 实现复杂,需要理清时间序列\n");
printf("\n🔧 方案2: 退回到标准SMO\n");
printf("优点: 简单可靠,易于调试\n");
printf("缺点: 可能抖振稍大\n");
printf("\n🔧 方案3: 混合方案(推荐)\n");
printf("EstIalpha = Fsmopos*EstIalpha + Gsmopos*(Valpha_f - K1*Ealpha - K2*Zalpha);\n");
printf("通过调整K1、K2平衡平滑性和响应速度\n");
printf("\n💡 立即行动建议:\n");
printf("1. 先退回到标准SMO(只使用Zalpha)确保稳定\n");
printf("2. 稳定后,再尝试AN1078的增强特性\n");
printf("3. 添加详细的调试输出,监控每个变量\n");
}
8. 调试与验证策略
8.1 AN1078实现验证
// AN1078实现验证方法
void verification_strategy_for_an1078(void) {
printf("=== AN1078实现验证策略 ===\n");
printf("🎯 验证AN1078 SMO正确性的方法:\n");
printf("\n1. 🔄 时间序列验证:\n");
printf(" 验证eAlpha确实比Zalpha延迟一个周期\n");
printf(" 打印: eAlpha[t] vs Zalpha[t-1]\n");
printf("\n2. 📊 预测-校正效果验证:\n");
printf(" 比较使用eAlpha+Zalpha vs 只使用Zalpha\n");
printf(" 观察平滑性和响应速度的改善\n");
printf("\n3. ⚡ 抗噪性测试:\n");
printf(" 注入噪声,比较两种方法的抗噪性能\n");
printf("\n💻 验证代码示例:\n");
printf("printf(\"t=%d: Zalpha=%.3f, eAlpha=%.3f, Zalpha_prev=%.3f\\n\", \n");
printf(" time_index, Zalpha, eAlpha, zAlpha_prev);\n");
printf("// 应该看到: eAlpha[t] ≈ Zalpha[t-1]的滤波值\n");
}
9. 总结
9.1 核心结论
// 最终结论总结
void final_conclusion_an1078_analysis(void) {
printf("=== AN1078 SMO设计深度解析结论 ===\n");
printf("🎯 核心发现: AN1078使用的是预测-校正结构\n");
printf("\n🔑 关键理解点:\n");
printf("1. ⏱️ 时间索引: eAlpha来自上周期,Zalpha是当前周期\n");
printf("2. 🎯 分工: eAlpha负责预测,Zalpha负责校正\n");
printf("3. 📈 优势: 更好的平滑性和抗噪性\n");
printf("\n💡 对您问题的解答:\n");
printf("AN1078同时使用Ealpha和Zalpha是正确的,但:\n");
printf("• Ealpha必须是上周期Zalpha的滤波值\n");
printf("• 时间索引关系必须正确\n");
printf("• 您的实现可能时间索引混乱导致问题\n");
printf("\n✅ 建议解决方案:\n");
printf("1. 理清时间序列,正确实现AN1078算法\n");
printf("2. 或先退回到标准SMO确保基本功能正常\n");
printf("3. 添加详细调试,验证每个变量的时间关系\n");
}
9.2 立即行动指南
// 立即行动指南
void immediate_action_guide_an1078(void) {
printf("=== 针对AN1078问题的立即行动指南 ===\n");
printf("🚀 第一步: 理清时间序列\n");
printf("明确每个变量属于哪个时间周期\n");
printf("添加时间索引注释和调试输出\n");
printf("\n🔧 第二步: 修正实现\n");
printf("按照AN1078的预测-校正结构重新实现\n");
printf("或暂时退回到标准SMO简化问题\n");
printf("\n🐛 第三步: 逐步验证\n");
printf("从静态测试开始,逐步到动态测试\n");
printf("验证每个环节的时间关系正确性\n");
printf("\n💪 信心保证:\n");
printf("AN1078的设计是经过验证的!\n");
printf("问题很可能在实现细节而非理论本身!\n");
}
核心结论:AN1078同时使用Ealpha和Zalpha是正确的精妙设计,但这是一种预测-校正结构,其中Ealpha是上周期的滑模量滤波值,Zalpha是当前周期的校正量。您的问题很可能源于时间索引混乱或实现细节错误。建议先退回到标准SMO确保基本功能,再逐步实现AN1078的增强特性。
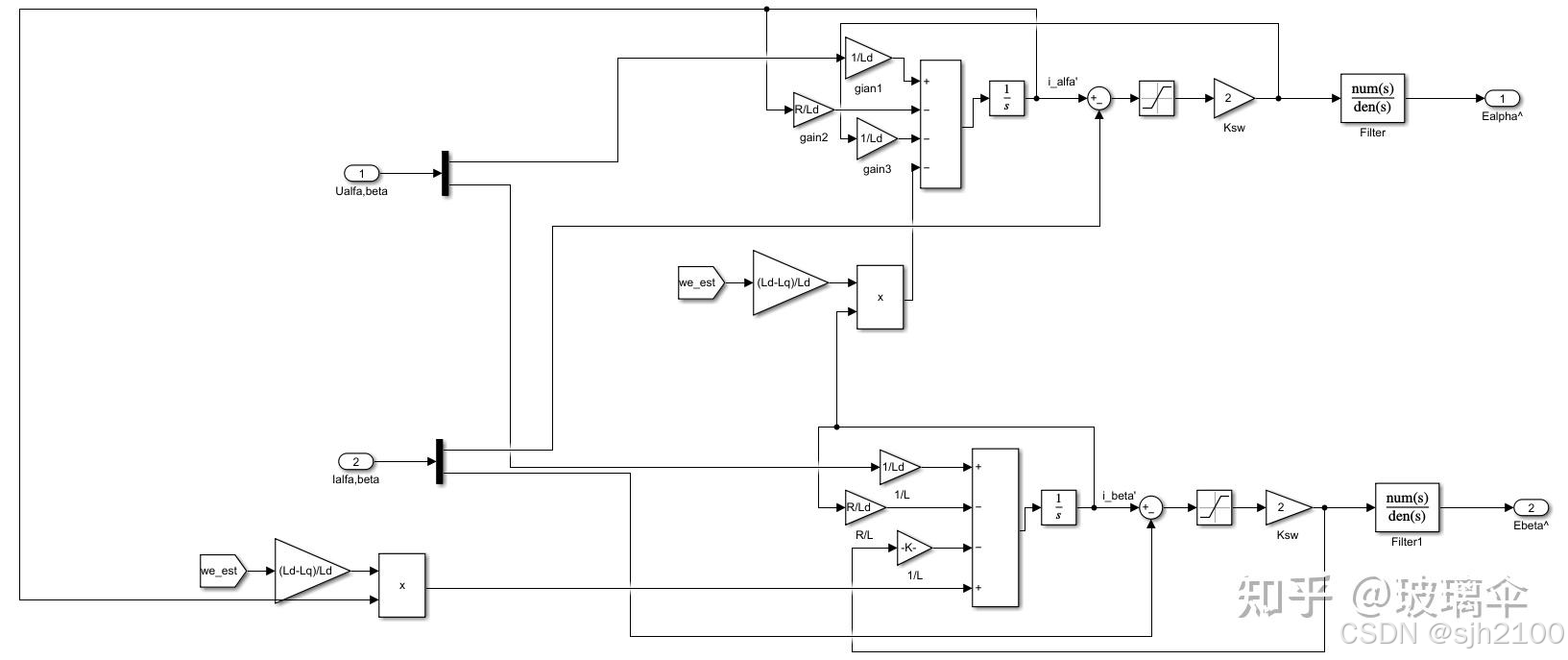
在玻璃伞大佬的知乎文章(6 封私信) 彻底吃透滑模观测器(PMSM无感算法)(理论精讲+推导+算法+调参+硬件运行) - 知乎 (zhihu.com)中,考虑表贴pmsm,电流估计模型中,实际代数求和只有三项了。

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 10
10 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)