基于STM32与ADE7763的SPI电能监测系统设计
SPI(Serial Peripheral Interface)是一种高速、全双工、同步的串行通信总线,由Motorola提出,广泛应用于嵌入式系统中。在STM32F103系列微控制器中,内置的SPI外设支持主从模式切换、多种时钟极性与相位配置(CPOL/CPHA),可灵活对接各类外设,如传感器、存储器及电能计量芯片ADE7763。

简介:本项目围绕STM32F103微控制器与ADE7763电能测量芯片之间的SPI通信展开,属于嵌入式硬件接口开发领域。STM32通过SPI接口读取ADE7763采集的电流有效值等电力参数,适用于智能电表和电力质量监测系统。项目包含完整的硬件设计、SPI通信协议实现、寄存器配置以及嵌入式C语言代码,帮助开发者构建实时电能监测系统。 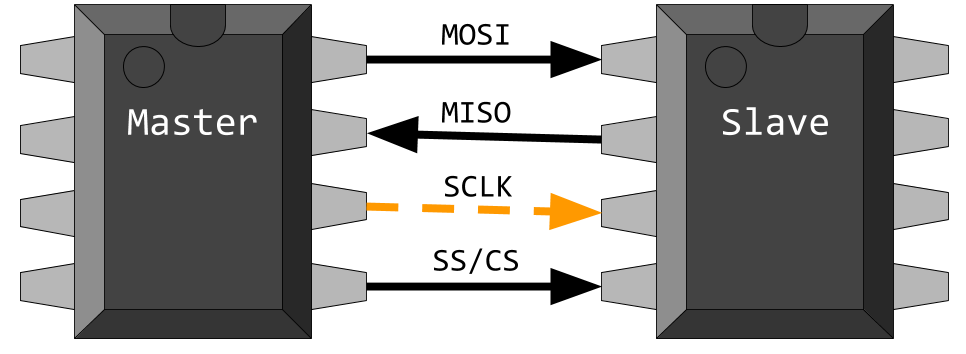
1. STM32与SPI通信基础概述
SPI(Serial Peripheral Interface)是一种高速、全双工、同步的串行通信总线,由Motorola提出,广泛应用于嵌入式系统中。在STM32F103系列微控制器中,内置的SPI外设支持主从模式切换、多种时钟极性与相位配置(CPOL/CPHA),可灵活对接各类外设,如传感器、存储器及电能计量芯片ADE7763。SPI通过四根信号线实现通信:SCK(时钟)、MOSI(主出从入)、MISO(主入从出)和NSS(片选),具备较高的数据吞吐能力,最高通信速率可达18MHz(在STM32F103上)。本章为后续深入理解STM32与ADE7763之间的高效数据交互奠定理论与实践基础。
2. SPI通信协议与STM32的主从模式配置
在嵌入式系统中,SPI(Serial Peripheral Interface)是一种广泛使用的高速串行通信协议,尤其在STM32系列微控制器中具有高度灵活性与可配置性。本章将深入探讨SPI通信协议的核心结构、时序机制,以及STM32F103微控制器中SPI模块的主从模式配置方法。通过本章内容,读者将掌握如何正确配置STM32的SPI外设,实现与从设备之间的稳定通信,并具备分析和调试SPI通信问题的能力。
2.1 SPI通信协议的基本结构
SPI是一种同步串行通信接口,通常由四个引脚组成:SCK(时钟)、MOSI(主出从入)、MISO(主入从出)和CS(片选)。其通信机制基于主从结构,由主设备控制时钟信号并发起数据传输。
2.1.1 SPI四线制接口定义(SCK、MOSI、MISO、CS)
SPI通信的基本信号线如下:
| 信号线 | 全称 | 功能说明 |
|---|---|---|
| SCK | Serial Clock | 由主设备发出的同步时钟信号 |
| MOSI | Master Out Slave In | 主设备发送数据到从设备 |
| MISO | Master In Slave Out | 从设备发送数据到主设备 |
| CS | Chip Select | 片选信号,低电平有效,用于选择从设备 |
SPI通信为全双工模式,即主设备和从设备可以同时发送和接收数据。CS信号用于选择当前通信的从设备,防止多个从设备之间的数据冲突。
2.1.2 数据传输时序与极性设置(CPOL与CPHA)
SPI通信的时序由两个关键参数决定:CPOL(Clock Polarity)和CPHA(Clock Phase)。
- CPOL :决定时钟空闲状态的电平
- CPOL=0:SCK空闲时为低电平,第一个边沿为上升沿
-
CPOL=1:SCK空闲时为高电平,第一个边沿为下降沿
-
CPHA :决定数据采样边沿
- CPHA=0:在第一个边沿采样数据
- CPHA=1:在第二个边沿采样数据
下表展示了四种SPI模式:
| 模式 | CPOL | CPHA | 数据采样时刻 |
|---|---|---|---|
| Mode 0 | 0 | 0 | 上升沿采样 |
| Mode 1 | 0 | 1 | 下降沿采样 |
| Mode 2 | 1 | 0 | 下降沿采样 |
| Mode 3 | 1 | 1 | 上升沿采样 |
不同设备可能支持不同的SPI模式,主设备必须与从设备的模式匹配,否则通信将失败。
2.1.3 主从设备之间的同步通信机制
SPI通信由主设备驱动SCK时钟信号,所有数据传输都与SCK同步。主设备通过CS信号选择从设备,然后通过MOSI发送数据,同时从设备通过MISO返回响应数据。
一个完整的SPI数据传输周期通常为8位(一个字节),但也可以支持16位或其他长度。每次传输开始前,主设备将CS拉低,表示通信开始;传输完成后,CS被拉高,释放总线。
以下是一个SPI主设备发送一个字节数据的时序图(使用Mode 0):
sequenceDiagram
主设备->>从设备: CS低电平
主设备->>从设备: SCK上升沿(第1位发送)
主设备->>从设备: SCK下降沿(第1位采样)
主设备->>从设备: SCK上升沿(第2位发送)
主设备->>从设备: SCK下降沿(第2位采样)
... (共8次循环)
主设备->>从设备: CS高电平
该机制确保主从设备之间的数据传输在同步时钟下进行,避免数据错位。
2.2 STM32F103的SPI模块配置
STM32F103微控制器内置多个SPI接口,支持主从模式切换、DMA传输、中断响应等功能。本节将详细介绍SPI外设的寄存器结构、初始化流程以及主从模式的配置方法。
2.2.1 SPI外设寄存器结构与初始化流程
STM32F103的SPI模块主要由以下几个寄存器组成:
| 寄存器名 | 功能说明 |
|---|---|
| SPI_CR1 | 控制寄存器1,用于设置SPI使能、主从模式、波特率、CPOL、CPHA等 |
| SPI_CR2 | 控制寄存器2,用于设置DMA使能、中断使能等 |
| SPI_DR | 数据寄存器,用于读写数据 |
| SPI_SR | 状态寄存器,反映SPI当前状态(如发送缓冲区空、接收缓冲区满等) |
| SPI_CRCPR | CRC校验寄存器 |
| SPI_RXCRCR | 接收CRC结果寄存器 |
| SPI_TXCRCR | 发送CRC结果寄存器 |
初始化流程如下:
- 使能SPI时钟 :通过RCC_APB1ENR或RCC_APB2ENR寄存器开启SPI外设的时钟。
- 配置GPIO引脚 :将SCK、MOSI、MISO和CS引脚配置为复用推挽输出或浮空输入。
- 设置SPI_CR1寄存器 :选择主从模式、设置CPOL/CPHA、设置数据位数、设置波特率预分频值。
- 设置SPI_CR2寄存器 :启用中断或DMA(可选)。
- 使能SPI外设 :设置SPI_CR1的SPE位,使能SPI模块。
2.2.2 SPI主模式配置方法与数据发送机制
主模式下,STM32作为主设备,控制SCK时钟并发起通信。以下是一个使用标准外设库配置SPI1为主模式的代码示例:
#include "stm32f10x.h"
void SPI1_Init(void) {
SPI_InitTypeDef SPI_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
// 1. 使能SPI1和GPIO时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1 | RCC_APB2Periph_GPIOA, ENABLE);
// 2. 配置SPI1的SCK(MA5)、MOSI(MA7)为复用推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 3. 配置MISO(MA6)为浮空输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 4. 配置SPI1为主模式,8位数据,Mode0,波特率预分频为16
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Master;
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge;
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_16;
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial = 7;
SPI_Init(SPI1, &SPI_InitStructure);
// 5. 启用SPI1
SPI_Cmd(SPI1, ENABLE);
}
// 发送一个字节的数据
void SPI1_WriteByte(uint8_t data) {
// 等待发送缓冲区为空
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) != SET);
// 写入数据到SPI数据寄存器
SPI_I2S_SendData(SPI1, data);
}
// 接收一个字节的数据
uint8_t SPI1_ReadByte(void) {
// 等待接收缓冲区非空
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) != SET);
// 读取数据
return SPI_I2S_ReceiveData(SPI1);
}
代码逐行解读:
- 第12行 :使能SPI1和GPIOA的时钟。
- 第16~21行 :配置SCK和MOSI为复用推挽输出,MISO为浮空输入。
- 第25~33行 :设置SPI1为主模式,采用Mode0(CPOL=Low, CPHA=1Edge),数据大小为8位,波特率预分频为16。
- 第36行 :启用SPI1。
- 第41~45行 :发送数据函数,等待发送缓冲区为空,写入数据。
- 第50~54行 :接收数据函数,等待接收缓冲区有数据,读取并返回。
2.2.3 SPI从模式配置及中断接收处理
从模式下,STM32作为从设备,由外部主设备控制SCK信号。以下是一个SPI从模式的配置示例,并启用了接收中断:
void SPI2_Init_Slave(void) {
SPI_InitTypeDef SPI_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
// 使能SPI2和GPIO时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_SPI2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
// 配置SCK(PB13)、MISO(PB14)、MOSI(PB15)
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
// 配置SPI2为从模式
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Slave;
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge;
SPI_InitStructure.SPI_NSS = SPI_NSS_Hard_Input;
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_16;
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial = 7;
SPI_Init(SPI2, &SPI_InitStructure);
// 使能SPI2接收中断
SPI_I2S_ITConfig(SPI2, SPI_I2S_IT_RXNE, ENABLE);
// 启用SPI2
SPI_Cmd(SPI2, ENABLE);
}
// 中断服务函数
void SPI2_IRQHandler(void) {
if (SPI_I2S_GetITStatus(SPI2, SPI_I2S_IT_RXNE) != RESET) {
uint8_t receivedData = SPI_I2S_ReceiveData(SPI2);
// 处理接收到的数据
}
}
代码逐行解读:
- 第10~14行 :配置SPI2的SCK、MISO、MOSI为浮空输入。
- 第18~25行 :设置SPI2为从模式,配置与主设备一致的CPOL和CPHA。
- 第28行 :启用SPI2的接收中断。
- 第31行 :启用SPI2。
- 第36~42行 :SPI2中断服务函数,判断是否为接收中断,并读取数据进行处理。
2.3 SPI通信的可靠性与调试技巧
尽管SPI通信机制简单,但在实际开发中仍可能出现通信异常、信号完整性差等问题。本节将介绍SPI通信的常见问题排查方法、逻辑分析仪的使用技巧,以及DMA优化策略。
2.3.1 通信异常排查与信号完整性分析
SPI通信异常通常由以下原因引起:
| 异常类型 | 可能原因 | 解决方案 |
|---|---|---|
| 数据错位 | CPOL/CPHA配置错误 | 确保主从设备模式一致 |
| 通信失败 | CS信号未正确拉低 | 检查CS控制逻辑 |
| 信号干扰 | PCB布局不良、引线过长 | 使用屏蔽线、缩短走线长度 |
| 速率不匹配 | 主设备波特率过高 | 降低SPI时钟频率 |
建议使用示波器或逻辑分析仪捕获SCK、MOSI、MISO信号,观察数据传输是否符合预期时序。
2.3.2 使用逻辑分析仪验证SPI时序
逻辑分析仪是调试SPI通信的利器。以Saleae Logic Analyzer为例,可通过以下步骤验证SPI通信:
- 将SCK、MOSI、MISO、CS四个信号接入逻辑分析仪通道。
- 设置SPI协议解码器,选择正确的CPOL、CPHA和位宽。
- 触发SPI通信(如发送一个数据包)。
- 观察解码后的数据是否与发送数据一致。
以下是一个逻辑分析仪解码SPI通信的示意图:
graph TD
A[SCK] -->|CPOL=0, CPHA=0| B[数据采样]
B --> C[MOSI: 0x55]
B --> D[MISO: 0xAA]
E[CS] -->|低电平| F[通信进行中]
通过分析图示,可以直观判断SPI通信是否正常,以及数据是否被正确接收。
2.3.3 SPI通信速率优化与DMA支持
提高SPI通信效率的方法之一是使用DMA(Direct Memory Access)进行数据传输。DMA可以在不占用CPU资源的情况下完成大量数据的搬运,提高系统效率。
以下是一个SPI1使用DMA发送数据的配置示例:
#include "stm32f10x.h"
#define TX_BUFFER_SIZE 128
uint8_t txBuffer[TX_BUFFER_SIZE] = { /* 初始化发送数据 */ };
void SPI1_DMA_Config(void) {
DMA_InitTypeDef DMA_InitStructure;
// 使能DMA1时钟
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);
// 配置DMA通道2(SPI1_Tx)
DMA_DeInit(DMA1_Channel3);
DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)&SPI1->DR;
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)txBuffer;
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralDST;
DMA_InitStructure.DMA_BufferSize = TX_BUFFER_SIZE;
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte;
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte;
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal;
DMA_InitStructure.DMA_Priority = DMA_Priority_High;
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable;
DMA_Init(DMA1_Channel3, &DMA_InitStructure);
// 启用DMA通道
DMA_Cmd(DMA1_Channel3, ENABLE);
// 启用SPI的DMA请求
SPI_I2S_DMACmd(SPI1, SPI_I2S_DMAReq_Tx, ENABLE);
}
代码逐行解读:
- 第9行 :定义发送缓冲区大小和数据。
- 第14行 :使能DMA1时钟。
- 第17~27行 :配置DMA通道3用于SPI1发送,设置内存地址、传输方向、缓冲区大小等。
- 第30行 :启用DMA通道。
- 第33行 :启用SPI1的DMA发送请求。
DMA方式避免了CPU在每次传输中频繁轮询或中断处理,提高了通信效率,尤其适用于大批量数据传输场景。
3. ADE7763电能计量芯片工作原理与寄存器配置
3.1 ADE7763芯片功能概述
3.1.1 芯片架构与电能计量原理
ADE7763是Analog Devices推出的一款高精度单相电能计量集成电路,专为实现电压、电流、有功功率、视在功率、电流有效值(RMS)、电压有效值等电力参数的实时采集而设计。该芯片内部集成了多通道Σ-Δ模数转换器(ADC)、数字信号处理器(DSP)、参考电压源以及SPI通信接口,能够直接接入经互感器或分压电阻调理后的模拟信号,完成从模拟采样到数字计量的全过程。
其核心架构包含两个独立的ADC通道:一个用于电流信号输入(通常通过电流互感器CT或分流器获取),另一个用于电压信号输入(通过电阻分压网络)。每个通道均采用高阶Σ-Δ调制技术,具备高达21位的有效分辨率,在50Hz/60Hz工频条件下可实现优于0.1%的测量精度。ADC输出的数据由片上DSP进行数字滤波和计算处理,利用真有效值算法(True RMS)和有功功率积分算法生成各类电参量。
整个计量流程如下图所示,展示了ADE7763如何将外部模拟信号转化为标准化的数字电能数据:
graph TD
A[外部电压信号] -->|电阻分压| B(ADE7763电压ADC)
C[外部电流信号] -->|CT或Shunt| D(ADE7763电流ADC)
B --> E[Σ-Δ ADC]
D --> F[Σ-Δ ADC]
E --> G[DSP引擎]
F --> G
G --> H[计算IRMS, VRMS, Active Power]
H --> I[寄存器存储结果]
I --> J[SPI接口读取]
该架构的优势在于高度集成化,减少了主控MCU的运算负担。STM32仅需通过SPI定期读取指定寄存器即可获得已处理的电力参数,无需自行实现复杂的FFT或积分算法。此外,ADE7763支持增益可编程放大器(PGA),允许对小幅度输入信号进行放大以提高信噪比,进一步增强系统在低负载条件下的测量灵敏度。
值得一提的是,ADE7763采用固定功能DSP而非通用处理器,所有计量算法均已固化在硬件逻辑中,确保了长期运行的一致性和抗干扰能力。这种“传感器+专用ASIC”模式广泛应用于智能电表、工业监控设备及能源管理系统中。
3.1.2 支持的电力参数类型(电压、电流、功率等)
ADE7763可提供多种关键电力参数的测量结果,适用于单相交流系统的全面监测。以下是其主要支持的参数及其物理意义与典型应用场景:
| 参数名称 | 寄存器地址(示例) | 单位 | 描述 |
|---|---|---|---|
| 电流有效值 (IRMS) | 0x0C | LSB对应mA级 | 表征实际流过线路的有效电流大小,用于过载保护判断 |
| 电压有效值 (VRMS) | 0x0E | LSB对应mV级 | 反映电网电压波动情况,可用于欠压/过压告警 |
| 瞬时有功功率 (Instantaneous Active Power) | 0x08 | W(瓦特) | 实时功率消耗,常用于动态负载分析 |
| 有功能量累计 (Energy Accumulation) | 0x10~0x12 | Wh(瓦时) | 长期能耗统计,适合电费结算用途 |
| 视在功率 (Apparent Power) | 计算得出 | VA(伏安) | 总容量指标,评估线路承载能力 |
| 功率因数 (Power Factor) | 计算得出 | 无量纲(0~1) | 衡量用电效率,反映无功补偿需求 |
这些参数并非全部以原始形式存储于单一寄存器中,部分如视在功率和功率因数需要根据IRMS与VRMS通过公式推导得到。例如:
S = V_{\text{RMS}} \times I_{\text{RMS}}, \quad PF = \frac{P}{S}
其中 $ P $ 为有功功率,$ S $ 为视在功率。
此外,ADE7763还具备零交叉检测功能,可通过专用引脚输出ZXM信号,供STM32用于同步采样或频率计算。这一特性在需要精确相位控制的应用中尤为重要,比如谐波分析或定时投切电容柜。
由于所有参数均由芯片自动更新并缓存至内部寄存器,STM32只需设定合适的采样周期(建议≥200ms以平均噪声影响),并通过SPI轮询读取即可实现稳定可靠的电能监控。对于要求更高响应速度的场合,也可启用中断机制,当某参数超过阈值时触发IRQ通知主控。
3.1.3 ADE7763与STM32之间通信接口选择
ADE7763支持标准SPI四线制接口(SCLK、DIN、DOUT、CS),完全兼容STM32F103系列微控制器的SPI外设模块。相较于I²C或UART,SPI在此类高速、连续数据传输场景中具有显著优势:
- 全双工通信 :可在同一时钟周期内发送命令并接收数据;
- 高带宽支持 :最高通信速率可达5MHz,足以满足实时刷新需求;
- 灵活主从控制 :STM32作为主设备可精准控制通信时序,避免总线竞争;
- 无地址冲突问题 :不像I²C需考虑设备地址分配。
通信连接示意如下表所示:
| ADE7763引脚 | 功能说明 | 连接至STM32F103 |
|---|---|---|
| SCLK | SPI时钟输入 | PA5 (SPI1_SCK) |
| DIN | 数据输入(写入命令) | PA7 (SPI1_MOSI) |
| DOUT | 数据输出(读取数据) | PA6 (SPI1_MISO) |
| CS | 片选信号(低有效) | PA4 (GPIO Output) |
| RESET | 复位输入 | PB0 (GPIO) |
| IRQ | 中断输出 | PB1 (EXTI) |
值得注意的是,DIN与DOUT在某些文档中标记为SDI和SDO,功能一致。CS必须由软件控制GPIO模拟,以便实现精细的帧同步;若使用硬件NSS可能导致无法正确分离多个SPI事务。
为了保证通信可靠性,应在PCB布线时遵循以下原则:
- 所有SPI信号走线尽量等长,减少时序偏移;
- 使用10kΩ上拉电阻稳定CS线状态;
- 在靠近ADE7763端添加0.1μF去耦电容,抑制电源噪声;
- 若传输距离较长(>10cm),建议串联22Ω终端电阻降低反射。
综上所述,SPI不仅是ADE7763与STM32之间的首选接口,更是构建高性能电能采集系统的关键纽带。
3.2 ADE7763寄存器结构与配置方法
3.2.1 寄存器地址映射与访问方式
ADE7763采用内存映射式寄存器结构,共定义了约30个8位可读写寄存器,分布在0x00 ~ 0x1F地址空间内。每个寄存器承担特定功能,包括配置设置、状态查询、数据读出等。访问操作通过SPI完成,遵循“先发地址、再收发数据”的协议模式。
写操作时序如下:
1. 拉低CS;
2. 发送地址字节(最高位W=0表示写);
3. 发送数据字节;
4. 拉高CS结束。
读操作略有不同:
1. 拉低CS;
2. 发送地址字节(W=1表示读);
3. 接收返回的数据字节;
4. 拉高CS。
以下是一个典型的寄存器访问函数实现(基于STM32 HAL库):
uint8_t ADE7763_ReadRegister(uint8_t reg_addr) {
uint8_t rx_data;
// 启动SPI传输
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_RESET); // CS低
// 发送读地址(最高位置1)
HAL_SPI_Transmit(&hspi1, ®_addr, 1, HAL_MAX_DELAY);
// 接收数据
HAL_SPI_Receive(&hspi1, &rx_data, 1, HAL_MAX_DELAY);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_SET); // CS高
return rx_data;
}
void ADE7763_WriteRegister(uint8_t reg_addr, uint8_t value) {
uint8_t tx_buffer[2];
tx_buffer[0] = reg_addr & 0x7F; // 清除读写标志(写操作W=0)
tx_buffer[1] = value;
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_RESET);
HAL_SPI_Transmit(&hspi1, tx_buffer, 2, HAL_MAX_DELAY);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_SET);
}
代码逻辑逐行解析:
- 第4行:片选拉低,启动SPI事务;
- 第7行:构造读地址,ADE7763规定地址字节的bit7=1表示读,因此 reg_addr 无需修改;
- 第9–10行:先发送地址,再接收数据。注意HAL库中 Transmit 与 Receive 需分开调用,因SPI全双工但HAL抽象层未合并;
- 第13行:CS拉高,结束通信;
- 写操作中第19行: & 0x7F 清除bit7,强制为写操作;
- 第20行:打包地址+数据共两字节一次性发送。
该实现方式确保每次访问严格符合ADE7763时序要求。此外,应避免连续快速访问,建议两次操作间插入至少10μs延时,防止内部状态机未就绪。
3.2.2 配置电流通道增益与滤波参数
ADE7763允许通过寄存器配置电流通道的PGA增益和高通滤波器(HPF)行为,从而适应不同的传感器输入范围。关键寄存器包括:
- APGAIN(地址0x06) :设置模拟增益,支持1×、2×、4×、8×四级放大;
- COMPMODE(地址0x07) :启用/禁用HPF,消除直流偏移;
- MMODE(地址0x09) :选择计量模式,如线性校准或正常运行。
假设使用5mΩ分流器采集最大10A电流,则峰值电压为50mV,有效值约35mV。为充分利用ADC动态范围,应开启4×增益:
// 设置电流通道增益为4x
ADE7763_WriteRegister(0x06, 0x02); // 0x02对应4x增益
// 启用高通滤波器去除DC偏移
uint8_t compmode = ADE7763_ReadRegister(0x07);
ADE7763_WriteRegister(0x07, compmode | (1 << 6)); // Set BIT6=HPFEN
参数说明:
- APGAIN 寄存器中,bit[1:0]决定增益:00=1x, 01=2x, 10=4x, 11=8x;
- COMPMODE 中BIT6为HPFEN,置1后启动高通滤波,截止频率约为0.5Hz,可有效滤除热电偶效应引起的缓慢漂移;
- 若关闭HPF,则必须确保输入信号无明显直流偏置,否则会导致RMS计算误差。
同时,还需配置 滤波器通带宽度 ,通过 MMODE 寄存器中的 HFCYC 位选择周期平均长度。例如设置为“每8个线路周期平均”,可提升抗噪性能:
ADE7763_WriteRegister(0x09, 0x10); // HFCYC=1 (8-cycle average)
此配置适用于电网波动较小的环境。若用于变频负载,则宜设为即时模式(HFCYC=0)以加快响应。
3.2.3 设置电压与电流采样率及校准参数
ADE7763的采样率由内部时钟和数字滤波器共同决定,默认输出数据速率(ODR)约为26.7kHz,经DSP处理后每40ms更新一次RMS值。用户可通过 LINECYC 寄存器(0x1E)设置基于线路周期的平均窗口,从而间接调节更新频率。
例如,若市电为50Hz,希望每秒更新20次,则应设置平均1个完整周期(20ms)的数据:
ADE7763_WriteRegister(0x1E, 0x01); // LINECYC=1,即每1个周期更新
ADE7763_WriteRegister(0x1F, 0x80); // Start update sequence
此外,校准环节至关重要。ADE7763提供多个校准寄存器,如:
- IRMSOS(0x0A) :电流RMS偏移校正;
- VRMSOS(0x0B) :电压RMS偏移校正;
- WGAIN(0x0D) :有功功率增益校正。
校准步骤一般为:
1. 输入标准电压/电流信号(如220V@50Hz, 5A纯阻性负载);
2. 读取当前IRMS寄存器值(raw_irms);
3. 计算误差比例: error_ratio = ideal / raw_irms ;
4. 调整WGAIN寄存器: new_wgain = old_wgain * error_ratio ;
具体实现如下:
float calibrate_power_gain(float measured_power, float reference_power) {
uint16_t wgain = (ADE7763_ReadRegister(0x0D) << 8) | ADE7763_ReadRegister(0x0E);
float correction_factor = reference_power / measured_power;
return wgain * correction_factor;
}
此过程需在出厂测试阶段完成,并将最终校准值烧录至EEPROM或Flash中,供系统启动时加载。
3.3 ADE7763数据读取与处理
3.3.1 读取电流有效值寄存器数据
电流有效值(IRMS)存储于三个连续寄存器中:0x0C(高位)、0x0D(中位)、0x0E(低位),构成一个24位补码格式数值。读取时需按顺序访问,且保持CS持续低电平以防止中途重置指针。
推荐的读取函数如下:
uint32_t ADE7763_ReadIRMS(void) {
uint8_t addr = 0x0C | 0x80; // 读模式 + 自动递增
uint8_t data[3];
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_RESET);
HAL_SPI_Transmit(&hspi1, &addr, 1, HAL_MAX_DELAY);
HAL_SPI_Receive(&hspi1, data, 3, HAL_MAX_DELAY);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_SET);
return ((uint32_t)data[0] << 16) | (data[1] << 8) | data[2];
}
逻辑分析:
- 第3行:构造读地址并启用自动地址递增(bit6=1),确保后续接收三字节对应IRMS[23:16], [15:8], [7:0];
- 第6–8行:片选期间完成地址发送与三字节接收;
- 最终拼接成大端格式的24位整数。
该值仍为原始ADC计数,需结合标定系数转换为物理量。
3.3.2 原始数据格式解析与数值转换
ADE7763的IRMS寄存器输出为24位有符号补码,满量程对应±8388607(0x7FFFFF)。其与真实电流的关系由以下公式确定:
I_{\text{real}} = \frac{\text{IRMS_RAW} \times V_{\text{ref}}}{\text{Gain} \times R_{\text{shunt}} \times K}
其中:
- $ V_{\text{ref}} = 2.42V $:内部参考电压;
- Gain = 4(前文配置);
- $ R_{\text{shunt}} = 0.005Ω $;
- K为刻度因子,ADE7763手册给出典型LSB权重约为0.03536 mArms/LSB(在4×增益下)。
因此可简化为:
#define IRMS_LSB_PER_MA 0.03536f
float convert_irms_to_ma(uint32_t raw_irms) {
if (raw_irms >= 0x800000) { // 负数补码处理
raw_irms = ~(raw_irms - 1) & 0x7FFFFF;
return -((float)raw_irms * IRMS_LSB_PER_MA);
}
return (float)raw_irms * IRMS_LSB_PER_MA;
}
参数说明:
- IRMS_LSB_PER_MA 来源于数据手册Table IX,在4×PGA下典型值;
- 补码判断依据:bit23为符号位,若置1则为负数;
- 返回单位为mA RMS,便于后续显示或上传。
3.3.3 误差分析与校正方法
尽管ADE7763具备高精度,但在实际应用中仍存在多重误差源:
| 误差来源 | 影响程度 | 校正方法 |
|---|---|---|
| 分流器阻值偏差 | ±1% ~ ±5% | 出厂校准写入IRMSOS |
| 温度漂移 | ±100ppm/°C | 使用低温漂金属膜电阻 |
| 相位失配 | 引起功率误差 | 软件相位补偿算法 |
| ADC非线性 | <0.1%FS | 利用WGAIN微调 |
最有效的校正是通过 偏移校正寄存器IRMSOS 。当系统空载时,理想IRMS应为0,若测得非零值,则写入相反数以抵消:
void calibrate_irms_offset() {
uint32_t zero_current_rms = ADE7763_ReadIRMS();
int24_t offset = -(int24_t)zero_current_rms;
ADE7763_WriteRegister(0x0A, (offset >> 16) & 0xFF);
ADE7763_WriteRegister(0x0B, (offset >> 8) & 0xFF);
ADE7763_WriteRegister(0x0C, offset & 0xFF);
}
执行该函数后,后续所有IRMS读数将自动减去初始偏移,显著提升零点稳定性。
此外,还可结合移动平均滤波(如滑动窗口均值)进一步抑制随机噪声,提升数据显示平滑度。
flowchart LR
Raw[原始IRMS读数] --> Offset[减去偏移校正值]
Offset --> Filter[滑动平均滤波器]
Filter --> Display[LCD/串口输出]
综合软硬件校正手段,可使系统整体精度控制在±0.5%以内,满足多数工业级应用需求。
4. STM32与ADE7763的硬件与软件集成开发
在现代电能计量系统中,高精度、实时性和稳定性是核心设计目标。STM32F103作为主流的ARM Cortex-M3架构微控制器,具备强大的外设支持和灵活的通信接口能力;而ADI公司的ADE7763是一款专用于单相电能计量的高精度芯片,集成了ADC、DSP引擎和SPI通信接口,能够直接输出电压、电流、有功功率等关键电力参数。将两者通过SPI总线进行高效协同工作,构成了一个完整的嵌入式电能采集系统的基础。本章将深入探讨从硬件连接到软件实现的全流程集成方案,重点围绕电路设计、驱动封装、数据采集逻辑以及测量算法展开,确保系统不仅功能完整,而且具备工业级的可靠性。
4.1 硬件电路设计与连接
实现STM32与ADE7763之间的稳定通信,首先依赖于合理的硬件电路设计。这包括信号电平匹配、电源去耦、参考电压稳定性以及PCB布局等多个方面。任何一个环节的疏忽都可能导致通信失败或测量误差增大,特别是在高频开关噪声环境中。
4.1.1 STM32与ADE7763的SPI接口电气连接
SPI通信采用四线制结构:SCK(时钟)、MOSI(主出从入)、MISO(主入从出)和CS(片选)。在本系统中,STM32F103作为主设备,ADE7763作为从设备,其引脚连接如下表所示:
| STM32F103 引脚 | 功能 | ADE7763 引脚 | 功能说明 |
|---|---|---|---|
| PA5 | SCK | SCLK | SPI时钟输入 |
| PA7 | MOSI | DIN | 数据输入(主发从收) |
| PA6 | MISO | DOUT | 数据输出(从发主收) |
| PA4 | NSS (CS) | CS | 片选信号(低有效) |
注意 :尽管STM32的NSS引脚可由硬件自动控制,但在实际应用中建议使用GPIO模拟片选(Software NSS),以避免多从机场景下的冲突问题。
此外,所有SPI信号线应尽可能走短且平行布线,减少串扰风险。由于ADE7763的工作电压为2.7V~3.6V,若STM32系统运行在3.3V逻辑电平下,则无需电平转换器,可直接连接。但若存在5V系统,则必须加入双向电平转换芯片(如TXS0108E)以防止过压损坏ADE7763。
// 示例:定义SPI GPIO引脚宏(适用于STM32F103标准外设库)
#define SPI_SCK_PIN GPIO_Pin_5
#define SPI_MOSI_PIN GPIO_Pin_7
#define SPI_MISO_PIN GPIO_Pin_6
#define SPI_CS_PIN GPIO_Pin_4
#define SPI_PORT GPIOA
// 初始化函数片段
void SPI_GPIO_Init(void) {
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
// 配置SCK、MOSI、CS为复用推挽输出
GPIO_InitStructure.GPIO_Pin = SPI_SCK_PIN | SPI_MOSI_PIN | SPI_CS_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(SPI_PORT, &GPIO_InitStructure);
// MISO为浮空输入(或上拉输入)
GPIO_InitStructure.GPIO_Pin = SPI_MISO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(SPI_PORT, &GPIO_InitStructure);
}
代码逻辑分析 :
- 第1~4行:定义便于维护的宏常量,提高代码可读性。
- RCC_APB2PeriphClockCmd :使能GPIOA时钟,这是任何GPIO操作的前提。
- SCK/MOSI/CS配置为 GPIO_Mode_AF_PP (复用推挽输出),允许SPI外设直接驱动这些引脚。
- MISO配置为 GPIO_Mode_IN_FLOATING ,因其仅用于接收数据,且ADE7763会主动驱动该线。
- 所有时钟速率设为50MHz,满足高速SPI需求(最高可达18MHz)。
4.1.2 电源与参考电压电路设计要点
ADE7763对供电质量极为敏感,尤其其内部ADC依赖精确的基准电压(典型值为2.4V)。因此,必须提供干净稳定的电源路径。
电源设计方案
- 使用LDO稳压器(如AMS1117-3.3)将5V转为3.3V,供给STM32与ADE7763共用。
- 在ADE7763的AVDD引脚前增加π型滤波网络(LC滤波):10μH电感 + 两个10μF陶瓷电容。
- 数字电源DVDD与模拟电源AVDD应分开布线,并通过磁珠隔离,防止数字噪声耦合至模拟部分。
参考电压处理
ADE7763内置2.4V基准源,也可外接更精密的基准(如REF3124)。推荐做法是在REVP和REVN引脚间接入10μF钽电容,提升基准稳定性。
| 参数 | 推荐值 | 说明 |
|---|---|---|
| AVDD | 3.3V ±5% | 模拟电源 |
| DVDD | 3.3V ±5% | 数字电源 |
| 基准电压精度 | < ±0.1% | 影响ADC整体精度 |
| 电源纹波 | < 30mVpp | 应通过示波器实测验证 |
| 去耦电容位置 | 尽量靠近芯片引脚 | 每个VDD引脚旁加0.1μF陶瓷电容 |
graph TD
A[5V输入] --> B[LDO AMS1117-3.3]
B --> C{电源分配}
C --> D[STM32F103 DVDD]
C --> E[ADE7763 AVDD]
C --> F[ADE7763 DVDD]
E --> G[LC滤波: 10uH + 10uF]
F --> H[磁珠隔离]
G --> I[ADE7763芯片]
H --> I
I --> J[2.4V内部基准]
J --> K[外部10uF钽电容滤波]
上图展示了电源路径的拓扑结构,强调了模拟/数字分离与滤波的重要性。
4.1.3 抗干扰设计与PCB布局建议
在强电磁环境(如配电柜附近)中,抗干扰能力决定了系统的长期稳定性。
关键PCB设计原则:
- 分层设计 :优先采用双层板,底层为完整地平面,顶层布信号线。
- 地平面分割 :模拟地(AGND)与数字地(DGND)在单点连接(通常位于芯片下方),避免形成环路。
- 信号走线 :
- SPI信号线长度尽量控制在5cm以内;
- 避免跨越不同电源区域;
- 走线宽度≥10mil,降低阻抗。 - 屏蔽与保护 :
- 在电流互感器输入端加入TVS二极管(如P6KE6.8CA)以防浪涌;
- 使用光耦隔离SPI信号(可选,在极端EMI环境下使用)。
实际测试经验:
曾在一个项目中出现ADE7763偶发通信失败的问题,经排查发现是SPI_MISO线上存在反射振铃。解决方案为在MISO线上串联一个33Ω电阻靠近STM32端,有效抑制了信号反弹,通信稳定性显著提升。
4.2 嵌入式C语言开发实践
完成硬件搭建后,下一步是构建稳定可靠的嵌入式软件框架。良好的模块化设计不仅能提升开发效率,也为后期维护和扩展打下基础。
4.2.1 SPI驱动模块的封装与调用
为增强代码复用性,应将SPI通信抽象为独立驱动模块。以下是一个基于STM32标准外设库的SPI初始化与数据收发函数示例。
#include "stm32f10x.h"
// 定义SPI设备句柄
SPI_InitTypeDef SPI_InitStructure;
void SPI1_Init(void) {
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1 | RCC_APB2Periph_GPIOA, ENABLE);
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Master;
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge;
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_16; // ~1.875MHz @ 72MHz PCLK2
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial = 7;
SPI_Init(SPI1, &SPI_InitStructure);
SPI_Cmd(SPI1, ENABLE);
}
uint8_t SPI_TransmitReceive(uint8_t tx_data) {
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET);
SPI_I2S_SendData(SPI1, tx_data);
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET);
return SPI_I2S_ReceiveData(SPI1);
}
参数说明与逻辑分析 :
- SPI_Direction_2Lines_FullDuplex :启用全双工模式,允许同时发送和接收。
- SPI_Mode_Master :设置STM32为主机。
- SPI_CPOL=Low , SPI_CPHA=1Edge :对应SPI模式0(常用),即空闲时钟低电平,第一个边沿采样。
- SPI_BaudRatePrescaler_16 :分频系数16 → 72MHz / 16 = 4.5MHz,再除以2(SPI1挂载APB2,默认72MHz)得实际波特率约2.25MHz(实际略低),留有一定裕量。
- SPI_NSS_Soft :使用软件控制CS引脚,避免总线竞争。
此驱动模块可通过如下方式调用:
// 写寄存器示例
void ADE7763_WriteRegister(uint8_t addr, uint8_t value) {
GPIO_ResetBits(SPI_PORT, SPI_CS_PIN); // 拉低CS
SPI_TransmitReceive(addr); // 发送地址(写标志已包含)
SPI_TransmitReceive(value); // 发送数据
GPIO_SetBits(SPI_PORT, SPI_CS_PIN); // 拉高CS结束传输
}
4.2.2 ADE7763初始化与寄存器写入函数实现
ADE7763上电后需配置一系列寄存器才能正常工作。关键步骤包括复位、设置增益、选择采样率等。
void ADE7763_Reset(void) {
// 向MODE寄存器写入复位命令(0x8000)
ADE7763_WriteRegister(0x09, 0x80); // MSB=1 触发复位
for(volatile int i=10000; i--; ); // 简单延时等待复位完成
}
void ADE7763_Init(void) {
ADE7763_Reset();
// 配置电流通道增益(PGA=8X)
ADE7763_WriteRegister(0x0A, 0x03); // CONFIG Register: PGA=8
// 设置电压通道衰减系数
ADE7763_WriteRegister(0x0B, 0x00); // VLEVEL = 0 (calibrated later)
// 启用RMS计算
ADE7763_WriteRegister(0x09, 0x01); // MODE register: RMSEN=1
}
| 寄存器地址 | 名称 | 典型配置值 | 功能描述 |
|---|---|---|---|
| 0x09 | MODE | 0x01 | 使能RMS计算 |
| 0x0A | CONFIG | 0x03 | 设置PGA增益为8倍 |
| 0x0B | VLEVEL | 0x00 | 初始电压电平校准占位 |
| 0x0F | COMMS | 0x80 | 忙状态检测位 |
注:每次写操作前应检查COMMS寄存器的BUSY位,防止总线冲突。
4.2.3 实时数据采集与处理模块开发
为了持续获取电流有效值,需要周期性读取IRMS寄存器(地址0x01~0x02,16位数据)。
uint16_t ADE7763_ReadIRMS(void) {
uint8_t high, low;
// 读取高位字节
GPIO_ResetBits(SPI_PORT, SPI_CS_PIN);
SPI_TransmitReceive(0x01 | 0x08); // 读操作,地址0x01
high = SPI_TransmitReceive(0x00);
GPIO_SetBits(SPI_PORT, SPI_CS_PIN);
Delay_us(10); // 最小间隔要求
// 读取低位字节
GPIO_ResetBits(SPI_PORT, SPI_CS_PIN);
SPI_TransmitReceive(0x02 | 0x08);
low = SPI_TransmitReceive(0x00);
GPIO_SetBits(SPI_PORT, SPI_CS_PIN);
return ((uint16_t)high << 8) | low;
}
执行流程说明 :
- ADE7763的IRMS为16位寄存器,分为高字节(0x01)和低字节(0x02);
- 每次读取需单独启动事务,因不支持连续读;
- 地址或操作中加入 0x08 表示读模式(最高位为1);
- 返回合并后的16位数值,后续用于换算真实电流值。
4.3 电流有效值测量程序实现
最终目标是将原始数字量转化为具有物理意义的电流值(单位:A),并实现可靠输出。
4.3.1 数据采集流程设计与实现
采用定时器中断触发采集,保证等时间隔采样,提升统计准确性。
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
void TIM2_Configuration(void) {
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
TIM_TimeBaseStructure.TIM_Period = 999; // (1kHz) 1ms间隔
TIM_TimeBaseStructure.TIM_Prescaler = 7199; // 72MHz / 7200 = 10kHz
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
TIM_Cmd(TIM2, ENABLE);
}
__IO uint16_t irms_raw;
float irms_real;
void TIM2_IRQHandler(void) {
if (TIM_GetITStatus(TIM2, TIM_IT_Update)) {
irms_raw = ADE7763_ReadIRMS();
irms_real = Convert_IRMS_To_Amps(irms_raw);
Display_On_LCD(irms_real); // 假设LCD显示函数
UART_Send_Data(irms_real); // 可选上传至上位机
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
}
}
4.3.2 数据处理算法与单位换算
ADE7763输出的IRMS是归一化数值,需结合系统参数换算为安培。
公式如下:
I_{\text{rms}} = \frac{\text{IRMS} {\text{raw}} \times V {\text{ref}}}{\text{Gain} \times R_{\text{shunt}} \times 2^{15}}
假设:
- $ V_{\text{ref}} = 2.4V $
- Gain = 8(PGA设置)
- $ R_{\text{shunt}} = 0.001Ω $(1mΩ分流器)
则比例因子为:
K = \frac{2.4}{8 \times 0.001 \times 32768} ≈ 9.155 \times 10^{-6} \, \text{A/LSB}
#define I_RMS_SCALE_FACTOR 9.155e-6f
float Convert_IRMS_To_Amps(uint16_t raw) {
return (float)raw * I_RMS_SCALE_FACTOR;
}
4.3.3 测量结果的显示与输出方式
支持多种输出方式,提升系统实用性。
| 输出方式 | 实现方法 | 优点 |
|---|---|---|
| OLED显示 | 使用SSD1306驱动库刷新文本 | 本地直观查看 |
| UART串口 | 发送JSON格式字符串 "{"irms":1.23}" |
易被上位机解析 |
| Modbus RTU | 集成Modbus协议栈 | 支持工业组网 |
示例UART输出:
void UART_Send_Data(float current) {
char buf[64];
sprintf(buf, "{\"irms\":%.3f}\r\n", current);
USART_SendString(USART1, buf);
}
综上所述,从硬件连接到软件实现,STM32与ADE7763的集成开发需兼顾电气特性、通信协议、数据处理等多个层面。只有各模块协同优化,才能构建出高精度、高可靠性的电能计量系统。
5. 电力参数采集系统构建与调试优化
5.1 系统整体架构与功能模块划分
构建一个完整的电力参数采集系统,需要从硬件和软件两个层面进行系统架构设计。本系统基于STM32F103微控制器与ADE7763电能计量芯片,采用SPI通信方式实现数据采集,通过UART或USB接口与上位机通信,实现数据的实时监控与可视化展示。
系统组成与各模块间数据交互流程
系统整体结构如下图所示,采用模块化设计思想:
graph TD
A[STM32F103] -->|SPI通信| B(ADE7763)
B --> C[电流、电压、功率数据]
A -->|UART/USB| D[上位机PC]
A --> E[LED/LCD显示]
C --> A
A -->|数据处理| C
C --> D
该架构中,STM32作为主控单元,负责以下任务:
- 控制ADE7763进行电力参数采集;
- 通过SPI接口读取寄存器数据;
- 对采集数据进行解析与单位换算;
- 将结果通过UART或USB发送至上位机;
- 可选:将结果送至LCD或LED显示。
多参数采集与实时监控机制设计
为实现多参数采集,系统采用轮询或中断方式定期读取ADE7763的电压、电流、有功功率等寄存器。为保证实时性,可以结合定时器触发采集任务。
采集周期建议设置为100ms~500ms之间,避免过高的采样频率对系统资源造成压力,同时确保数据更新频率满足监控需求。
系统资源分配与任务调度策略
STM32F103资源有限,合理分配资源是保障系统稳定运行的关键。建议采用以下调度策略:
| 模块 | 占用资源 | 说明 |
|---|---|---|
| SPI | 1个SPI接口 | 用于与ADE7763通信 |
| UART | 1个串口 | 用于与PC通信 |
| 定时器 | 1个通用定时器 | 控制定时采集 |
| GPIO | 多个引脚 | 控制CS、复位等 |
| DMA(可选) | SPI/DMA通道 | 提高数据传输效率 |
任务调度可采用主循环+中断方式实现,主循环负责协调各模块运行,中断用于处理定时采集和通信事件。
5.2 实时监控与数据可视化
采集到的电力参数需要通过可视化方式展示,便于用户实时监控。本节介绍如何通过串口助手或图形界面实现数据显示。
数据采集与上位机通信(UART/USB)
STM32通过UART或USB接口将采集到的数据发送至上位机。若使用USB,需借助虚拟串口(如CH340或CP2102)转接模块,便于PC识别。
示例代码:通过串口发送采集数据(C语言)
void SendPowerData(float voltage, float current, float power) {
char buffer[100];
// 格式化输出电压、电流、功率
sprintf(buffer, "Voltage: %.2f V, Current: %.2f A, Power: %.2f W\r\n", voltage, current, power);
// 发送数据到串口
HAL_UART_Transmit(&huart1, (uint8_t*)buffer, strlen(buffer), HAL_MAX_DELAY);
}
voltage:电压值(单位:V)current:电流值(单位:A)power:有功功率值(单位:W)HAL_UART_Transmit():HAL库串口发送函数
使用串口助手或图形界面展示测量数据
推荐使用如下工具进行数据监控:
| 工具 | 说明 | 特点 |
|---|---|---|
| XCOM | 串口调试助手 | 简洁易用,支持数据发送与接收 |
| SerialAssistant | 自定义图形界面 | 支持曲线绘制、数据存储 |
| Python + PySerial | 编程方式处理数据 | 可开发完整上位机系统 |
示例:Python读取串口数据并显示
import serial
import time
ser = serial.Serial('COM3', 9600) # 根据实际串口号修改
while True:
if ser.in_waiting > 0:
line = ser.readline().decode('utf-8').strip()
print(line)
time.sleep(0.1)
数据记录与日志分析功能实现
为了便于后续分析,系统可将采集数据保存为CSV文件。例如,Python端可将数据追加写入本地文件:
with open("power_data.csv", "a") as f:
f.write(f"{voltage},{current},{power},{timestamp}\n")
voltage:电压值current:电流值power:功率值timestamp:时间戳(可选)
CSV文件可导入Excel或MATLAB进行数据分析,生成趋势图或误差分析图表。
5.3 系统调试与性能优化
系统调试是确保采集系统稳定运行的关键环节。本节将从硬件、软件和性能优化三个方面介绍调试与优化策略。
硬件故障排查与信号完整性验证
在硬件连接中,常见的问题包括:
- SPI时钟频率设置不当,导致通信失败;
- CS引脚未正确拉低,导致ADE7763无法响应;
- 电源不稳定,造成ADE7763采样误差;
- PCB布线不合理,引入噪声干扰。
建议使用逻辑分析仪(如Saleae、DSLogic)抓取SPI通信波形,验证SCK、MOSI、MISO、CS信号是否正常。
软件逻辑错误调试与断点分析
在Keil或STM32CubeIDE中,可使用以下调试手段:
- 设置断点逐步执行代码,查看变量值;
- 使用Watch窗口监视寄存器状态;
- 查看SPI状态寄存器(如SPI_SR)判断通信状态;
- 打印调试信息到串口,辅助定位问题。
示例:打印SPI状态寄存器
printf("SPI Status: 0x%02X\r\n", hspi1.Instance->SR);
提高系统稳定性与测量精度的优化策略
为提升系统稳定性与测量精度,建议采取以下措施:
- 软件滤波 :对采集数据进行滑动平均或卡尔曼滤波处理;
- 硬件滤波 :在ADE7763的输入端添加RC低通滤波电路;
- 采样同步 :确保电压与电流采样同步进行,避免相位误差;
- 参考电压稳定 :使用高精度稳压芯片为ADE7763提供基准电压;
- SPI通信速率优化 :根据系统时钟调整SPI波特率预分频值,确保通信可靠。
示例:滑动平均滤波函数
#define FILTER_SIZE 10
float voltage_buffer[FILTER_SIZE];
int index = 0;
float MovingAverage(float new_value) {
voltage_buffer[index++] = new_value;
if (index >= FILTER_SIZE) index = 0;
float sum = 0;
for (int i = 0; i < FILTER_SIZE; i++) {
sum += voltage_buffer[i];
}
return sum / FILTER_SIZE;
}
简介:本项目围绕STM32F103微控制器与ADE7763电能测量芯片之间的SPI通信展开,属于嵌入式硬件接口开发领域。STM32通过SPI接口读取ADE7763采集的电流有效值等电力参数,适用于智能电表和电力质量监测系统。项目包含完整的硬件设计、SPI通信协议实现、寄存器配置以及嵌入式C语言代码,帮助开发者构建实时电能监测系统。

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 13
13 0
0- 0



 已为社区贡献14条内容
已为社区贡献14条内容

所有评论(0)