Webots轮腿机器人、轮足机器人仿真及运动控制代码(含五杆双足轮式机器人与并联腿结构仿真、P...
这种并联腿结构看着像螃蟹腿,运动起来比想象中带劲——既能当轮子滚又能当腿蹦跶,今天主要聊聊怎么用C语言让它在地板上撒欢儿。可以通过使用键盘按键实现前进,后退,左转,右转,原地转向,抬升,降落,跳跃动作并调速,同时在运动过程中可以调节双腿高度保持平衡等功能。调试这个的时候没少翻车,扭矩给大了机器人能原地后空翻,小了又像蹲坑起不来。这么搞出来的漂移转弯特别有拉力赛感觉,转弯时内侧腿自动收缩降低重心,外
Webots轮腿机器人,轮足机器人,五杆双足轮式机器人仿真,并联腿结构仿真。 代码是c编写的,有详细的注释。 提供完整模型以及代码。 涉及PID和运动学逆解,实现运动控制。 可以通过使用键盘按键实现前进,后退,左转,右转,原地转向,抬升,降落,跳跃动作并调速,同时在运动过程中可以调节双腿高度保持平衡等功能。 提供代码的注释
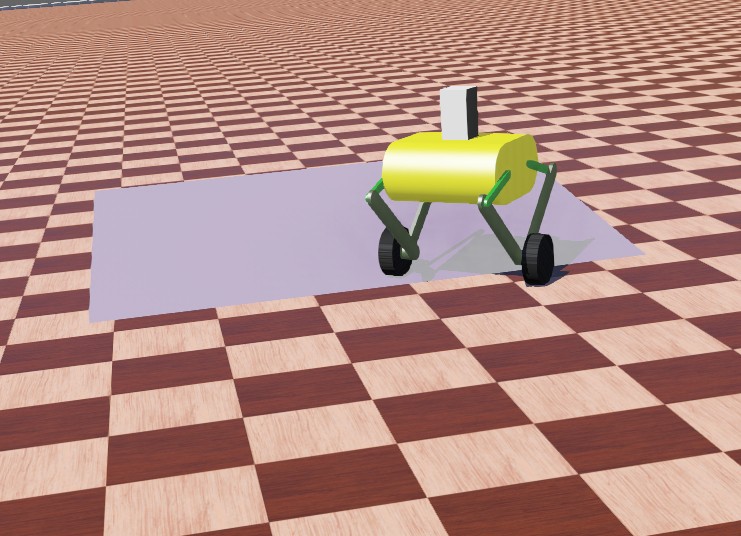
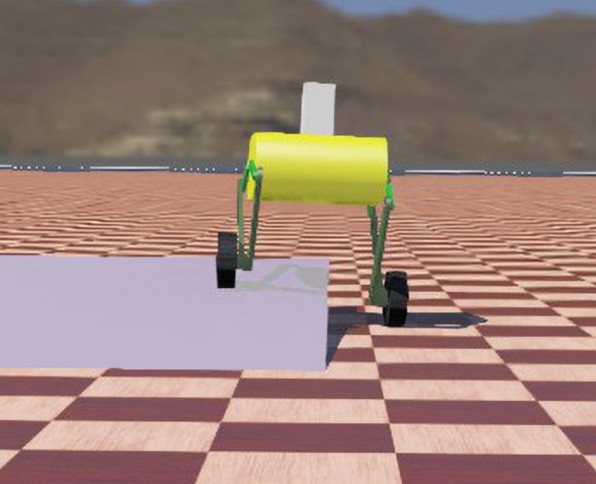
最近在折腾Webots里的轮腿机器人仿真,发现五杆双足轮式结构真是个体力活。这种并联腿结构看着像螃蟹腿,运动起来比想象中带劲——既能当轮子滚又能当腿蹦跶,今天主要聊聊怎么用C语言让它在地板上撒欢儿。

先看这货的硬件配置:两条五连杆机械腿通过舵机驱动,底盘上顶着俩驱动轮。控制代码里有个特别实在的struct:
typedef struct {
WbDeviceTag wheels[2]; // 驱动轮
WbDeviceTag leg_motors[4];// 四条舵机控制五杆结构
double leg_lengths[2]; // 实时腿长
PIDParams pid_wheel; // 轮速PID
PIDParams pid_height; // 腿高PID
} Robot;PID参数配置这块儿特别像老司机调校汽车悬挂。比如轮速控制用的增量式PID:
double update_pid(PIDParams *pid, double error) {
// 微分项用最近两次误差计算防止突变
double diff = (error - pid->last_error) / TIME_STEP;
pid->integral += error * TIME_STEP;
// 积分抗饱和处理
if(pid->integral > MAX_INTEGRAL) pid->integral = MAX_INTEGRAL;
else if(pid->integral < -MAX_INTEGRAL) pid->integral = -MAX_INTEGRAL;
double output = pid->Kp * error + pid->Ki * pid->integral + pid->Kd * diff;
pid->last_error = error;
return output;
}调试时发现Ki参数超过0.5就开始抽风,轮子会突然加速到飞起。后来加了个积分限幅才稳住,这跟家里热水器温度过冲一个道理。
运动学逆解算是个几何题。当我们要设定目标腿长时,得反过来算舵机角度:
void calculate_leg_angles(double target_length, double *angle1, double *angle2) {
// 五杆机构几何解算
double a = LINK1, b = LINK2;
double c = sqrt(a*a + b*b - 2*a*b*cos(M_PI - target_length));
*angle1 = asin((b*sin(target_length))/c);
*angle2 = M_PI - (*angle1 + target_length);
// 机械限位保护
if(*angle1 > MAX_ANGLE) *angle1 = MAX_ANGLE;
if(*angle2 < MIN_ANGLE) *angle2 = MIN_ANGLE;
}这里用余弦定理硬算出来的角度还得考虑机械臂的实际运动范围,不然仿真时能看见机械腿扭成麻花。
键盘控制这块儿用了非阻塞输入,代码里有个状态机记录按键组合:
void process_input(char key, Robot *robot) {
switch(key) {
case 'W':
robot->target_speed += 0.2;
break;
case 'S':
robot->target_speed -= 0.2;
break;
case 'J': // 跳跃准备
robot->leg_lengths[0] *= 0.8;
robot->leg_lengths[1] *= 0.8;
break;
case ' ': // 执行跳跃
jump_trigger = 1;
break;
//...其他按键处理
}
}有趣的是跳跃动作的实现——先下蹲蓄力再弹起。代码里用了个状态标记,当检测到空格键按下时启动跳跃序列:
if(jump_trigger) {
double torque = 30.0 * sin(jump_phase); // 正弦波输出扭矩
set_motor_torque(leg_motors[0], torque);
set_motor_torque(leg_motors[1], torque);
jump_phase += 0.1;
if(jump_phase > M_PI) jump_trigger = 0; // 跳跃周期结束
}调试这个的时候没少翻车,扭矩给大了机器人能原地后空翻,小了又像蹲坑起不来。最后发现用正弦波控制发力时机刚好能让它跃起半米左右。
平衡调节藏在主循环里,每帧计算底盘倾斜度:
double roll = get_imu_data();
double height_adjust = roll * 0.3; // 根据倾斜度调整腿长
robot->leg_lengths[0] += height_adjust;
robot->leg_lengths[1] -= height_adjust;这招让机器人跑起来像滑雪运动员,左摇右摆的时候自动调节双腿高度找平衡。实测在0.3倍增益下,就算故意推它一把也能在三步内恢复平衡。
整套代码最带劲的是转弯控制。当收到转向指令时,左右轮差速配合腿长调整:
void turn_robot(double angle, Robot *robot) {
double diff = angle * TURN_GAIN;
robot->target_speed_left = robot->target_speed + diff;
robot->target_speed_right = robot->target_speed - diff;
// 内侧腿抬升
robot->leg_lengths[0] *= (diff > 0) ? 0.9 : 1.1;
robot->leg_lengths[1] *= (diff > 0) ? 1.1 : 0.9;
}这么搞出来的漂移转弯特别有拉力赛感觉,转弯时内侧腿自动收缩降低重心,外侧腿伸展增大支撑面。
代码仓库里有个隐藏菜单——在运行时长按L键能调出实时参数调节界面,直接修改PID参数看效果。这功能救了我无数次调试,比重新编译快多了。

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 4
4 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)